(计算机图形学)三维变换与投影汇编
- 格式:ppt
- 大小:6.71 MB
- 文档页数:5

计算机形学中的几何变换与投影技术计算机形学是计算机科学与计算机图形学中重要的一个领域,它研究如何在计算机上对图形进行表示、创建、编辑和呈现。
其中,几何变换和投影技术是计算机形学中常用且核心的技术之一,它们在计算机图形学领域中被广泛应用。
一、几何变换在计算机图形学中,几何变换是指对图形进行平移、旋转、缩放和扭曲等操作,从而改变图形的位置、形状和大小,以满足特定需求。
1. 平移变换平移变换是对图形进行沿着指定方向和距离的移动。
在二维空间中,平移变换可以表示为:x' = x + dxy' = y + dy其中,(x', y')是平移后的坐标,(x, y)是原始坐标,(dx, dy)是平移的向量。
2. 旋转变换旋转变换是对图形进行绕指定点或绕原点的旋转操作。
在二维空间中,旋转变换可以表示为:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ其中,(x', y')是旋转后的坐标,(x, y)是原始坐标,θ是旋转角度。
3. 缩放变换缩放变换是对图形进行放大或缩小的操作。
在二维空间中,缩放变换可以表示为:x' = x * sxy' = y * sy其中,(x', y')是缩放后的坐标,(x, y)是原始坐标,(sx, sy)是缩放因子。
4. 扭曲变换扭曲变换是对图形进行形状的变换,使得某些部分被拉伸或收缩。
扭曲变换可以通过矩阵运算进行表示,具体操作较为复杂。
二、投影技术在计算机图形学中,投影技术是指将三维空间中的图形映射到二维平面上的过程。
常见的投影技术包括平行投影和透视投影。
1. 平行投影平行投影是一种保持图形中平行线在投影后保持平行的投影方式。
在三维空间中,平行投影可以表示为:x' = xy' = y其中,(x', y')是投影平面上的坐标,(x, y)是三维空间中的坐标。
计算机形学三维几何变换计算机形学是计算机科学中的一个重要分支,主要研究计算机图形学中的各类图形的数学描述方法和计算机图形学技术的应用。
其中,三维几何变换是计算机形学中的一项重要内容。
本文将介绍三维几何变换的概念、常见的三维几何变换操作以及其在计算机图形学中的应用。
一、概述三维几何变换是指对三维空间中的图形进行平移、旋转、缩放等操作,从而改变图形的位置和形状的过程。
三维几何变换是计算机图形学中非常常用的操作,可以实现物体的移动、旋转、缩放等效果。
二、三维几何变换的操作1. 平移(Translation)平移是指将图形沿指定的轴方向移动一定距离。
平移操作可以简单地理解为将图形的每一个顶点坐标向指定方向移动相同距离。
平移操作的数学表达式为:\[T(x,y,z) = (x + dx, y + dy, z + dz)\]其中,(x,y,z)表示原始顶点坐标,(dx,dy,dz)表示沿(x,y,z)轴平移的距离。
2. 旋转(Rotation)旋转是指将图形绕指定轴进行旋转。
旋转操作可以用欧拉角、四元数、矩阵等多种方式进行计算。
旋转操作的数学表达式为:\[R(x,y,z) = M(x,y,z)\]其中,(x,y,z)表示旋转前的坐标,M表示旋转变换矩阵。
旋转变换矩阵的计算方式有很多,最常见的是使用旋转角度和旋转轴来计算旋转矩阵。
3. 缩放(Scaling)缩放是指将图形沿各个轴向相应的方向按比例进行扩大或缩小。
缩放操作可以用不同的比例因子对每个顶点坐标进行缩放计算。
缩放操作的数学表达式为:\[S(x,y,z) = (sx, sy, sz)(x,y,z)\]其中,(x,y,z)表示原始顶点坐标,(sx,sy,sz)表示在x轴、y轴和z轴方向的缩放比例。
4. 其他变换操作除了平移、旋转和缩放之外,三维几何变换还可以包括倾斜、翻转、剪切等其他操作。
这些操作都是通过对图形的顶点坐标进行适当的数学计算而实现。
三、三维几何变换的应用三维几何变换在计算机图形学中有广泛的应用。
计算机形学中的几何变换与投影算法基础在计算机图形学中,几何变换与投影算法是实现三维对象表示、变换和可视化的基础。
通过对三维空间中的对象进行变换和投影,可以将其呈现在二维平面上,从而实现更直观的可视化效果。
本文将介绍计算机形学中的几何变换和投影算法的基本概念和应用。
一、几何变换几何变换是指通过对三维对象进行平移、旋转、缩放等操作,改变其在空间中的位置和形状。
在计算机图形学中,常用的几何变换包括平移、旋转、缩放和剪切。
1. 平移平移是指将对象沿着指定方向移动一定的距离。
在计算机图形学中,平移变换可以通过将对象的每个顶点坐标增加一个平移向量来实现。
平移变换公式如下:[x'] = [1 0 0 tx] [x][y'] [0 1 0 ty] [y][z'] [0 0 1 tz] [z][1 ] [0 0 0 1] [1]其中,(tx, ty, tz)表示平移向量。
通过对对象的每个顶点应用上述变换矩阵,可以实现平移效果。
2. 旋转旋转是指将对象绕指定轴进行旋转。
在计算机图形学中,常用的旋转有绕X轴、Y轴和Z轴旋转。
旋转变换可以通过将对象的每个顶点坐标乘以一个旋转矩阵来实现。
旋转变换矩阵的形式如下:[x'] = [1 0 0 0] [x][y'] [0 cosθ -sinθ 0] [y][z'] [0 sinθ cosθ 0] [z][1 ] [0 0 0 1] [1]其中,θ表示旋转角度。
通过对对象的每个顶点应用上述变换矩阵,可以实现旋转效果。
3. 缩放缩放是指改变对象的尺寸大小。
在计算机图形学中,缩放变换可以通过将对象的每个顶点坐标乘以一个缩放因子来实现。
缩放因子分别作用于X、Y和Z轴的坐标,从而改变对象在各个轴上的尺寸。
缩放变换公式如下:[x'] = [sx 0 0 0] [x][y'] [0 sy 0 0] [y][z'] [0 0 sz 0] [z][1 ] [0 0 0 1] [1]其中,(sx, sy, sz)表示缩放因子。
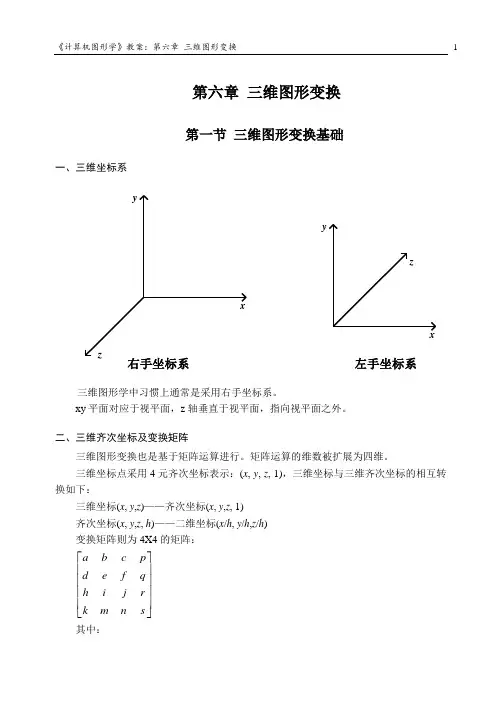
第六章 三维图形变换第一节 三维图形变换基础一、三维坐标系xyzxyz右手坐标系左手坐标系三维图形学中习惯上通常是采用右手坐标系。
xy 平面对应于视平面,z 轴垂直于视平面,指向视平面之外。
二、三维齐次坐标及变换矩阵三维图形变换也是基于矩阵运算进行。
矩阵运算的维数被扩展为四维。
三维坐标点采用4元齐次坐标表示:(x , y , z , 1),三维坐标与三维齐次坐标的相互转换如下:三维坐标(x , y ,z )——齐次坐标(x , y ,z , 1) 齐次坐标(x , y ,z , h )——二维坐标(x /h , y /h ,z /h ) 变换矩阵则为4X4的矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡s nm kr j i h q f e d p c b a 其中:平移变换第二节 三维几何变换一、三维基本变换 1. 平移变换⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1010000100001nmk T )1,,,()1,,,(n z m y k x T z y x +++=⋅2. 比例变换)1,,,()1,,,(1000000000000jz ey ax T z y x j e a T =⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡= 3. 旋转变换三维的基本旋转变换分为三种,即绕三个坐标轴的旋转变换。
(1)绕z 轴旋转γ角旋转后z 值不变,x,y 值将发生改变,x,y 值的计算公式与平面旋转相同,即:zz y x y y x x ='+='-='γγγγcos sin sin cos 则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000010000cos sin 00sin cos γγγγT 有:)1,1,cos sin ,sin cos ()1,,,(γγγγy x y x z y x +-=T(2)绕x 轴旋转α角则旋转后x 的坐标值不变,y 和z 的坐标值将改变,相当于在yz 平面上绕平面原点进行旋转变换。
平面转转变换的公式为:ααααcos sin sin cos y x y y x x +='-='对应而来,这里y 对应于x ,z 对应y ,有:ααααcos sin sin cos z y z z y y +='-='则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10000cos sin 00sin cos 00001ααααT )1,cos sin ,sin cos ,()1,,,(ααααz y z y x z y x +-=T(3)绕y 轴旋转β角这时,z 对应于x ,x 对应于y 。

1 实验目的1)掌握4*4矩阵乘法运算的编程实现。
2)掌握平移、比例、旋转三种基本三维几何变换矩阵生成。
3)掌握正交投影图的生成和绘制方法。
2 实验要求1)三维坐标系的原点位于屏幕中心,X轴水平向右,Y轴垂直向上,Z轴垂直于坐标屏幕,指向屏幕外。
2)设计实现三维图形变换类,具有平移、比例、旋转三维几何变换功能,以及正交投影变换功能.3)使用第二章的直线类绘制正四面体的是三维线框模型,要求体心位于坐标原点,使正四面体同时绕Y轴匀速旋转,并相对于体心点来回缩放。
4)使用双缓冲机制,绘制正四面体三维线框模型的二维正交投影图,要求投影到XOY平面。
3 详细设计3。
1 核心算法及类型设计void CTrans3DView::BuildPointEdge(){double d=400;P[0]。
x=d/2; P[0].y=d/2; P[0].z=d/2;P[1]。
x=d/2; P[1]。
y=-d/2; P[1].z=-d/2;P[2]。
x=—d/2; P[2]。
y=—d/2; P[2]。
z=d/2;P[3].x=-d/2; P[3].y=d/2; P[3]。
z=—d/2;E[0]。
SetPointsIndex(0,1);E[1].SetPointsIndex(0,2);E[2]。
SetPointsIndex(0,3);E[3]。
SetPointsIndex(1,2);E[4]。
SetPointsIndex(1,3);E[5].SetPointsIndex(2,3);}void CTrans3DView::OnDraw(CDC*pDC){CTrans3DDoc* pDoc = GetDocument();ASSERT_VALID(pDoc);if(!pDoc)return;// TODO:在此处为本机数据添加绘制代码CRect rect;GetClientRect(&rect);pDC-〉SetMapMode(MM_ANISOTROPIC);pDC-〉SetWindowExt(rect.Width(),rect.Height());pDC—>SetViewportExt(rect.Width(),—rect.Height());pDC—〉SetViewportOrg(rect.Width()/2,rect。
计算机图形学中的三维变换与投影算法计算机图形学是研究计算机中图形的表示、生成、处理和显示的学科。
在计算机图形学中,三维变换和投影算法是非常重要的技术,它们可以用来对三维物体进行位置、姿态和尺寸的调整,并将其投影到二维画面上。
三维变换是指通过对三维物体的顶点进行一系列变换操作,来改变物体的位置、形状和方向。
常用的三维变换操作包括平移、旋转和缩放。
平移操作改变物体的位置,旋转操作改变物体的方向,而缩放操作改变物体的尺寸。
通过组合不同的变换操作,可以实现复杂的三维物体的变换。
平移是通过将物体的每个顶点按照指定的距离移动来改变物体的位置。
旋转是通过将物体的每个顶点绕着旋转中心按照指定的角度旋转来改变物体的方向。
缩放是通过将物体的每个顶点按照指定的比例因子进行缩放来改变物体的尺寸。
这些变换操作可以通过矩阵运算来进行计算,从而实现对三维物体的变换。
投影是将三维物体投影到二维画面上的操作。
在计算机图形学中,常用的投影算法有平行投影和透视投影。
平行投影是将物体的每个顶点沿着平行于视线的方向进行投影,得到二维画面上的对应点。
透视投影则考虑到物体离视点的距离,并根据投影面和视点的位置关系而调整投影结果。
通过投影操作,可以将三维物体在计算机屏幕上展示出来,从而实现真实感的图形显示。
在实际应用中,三维变换和投影算法被广泛应用于计算机游戏、虚拟现实、计算机辅助设计等领域。
通过三维变换,可以实现物体的动画效果,使得游戏或虚拟现实场景更加逼真。
而通过投影算法,可以实现对物体的观察和测量,帮助设计师更好地进行产品设计和展示。
总结来说,计算机图形学中的三维变换和投影算法是实现三维物体在计算机中显示和操作的关键技术。
通过对物体进行平移、旋转和缩放等变换操作,可以改变物体的位置、方向和尺寸;而通过投影操作,可以将三维物体投影到二维画面上展示出来。
这些技术在计算机游戏、虚拟现实和计算机辅助设计等领域发挥着重要的作用,推动了计算机图形学的发展。
195 5.3.3 三维图形透视投影变换透视投影属于中心投影,透视图也是一种将三维物体用二维平面来表达的立体图。
与轴测图不同,它是用中心投影法,通过空间一点(即投影中心)将立体投射到投影面上所得到的投影图,如图5.37所示。
投影中心又称为视点,它相当于观察者的眼睛。
投影面置于视点与立体之间,将立体上各点与视点相连所得到的投影线分别与投影面相交,其交点就是立体上相应点的透视投影,再将其依次相连,即获得具有真实立体感的透视图。
透视投影可用矩阵变换方法获得,在4 × 4阶变换矩阵中第4列元素p 、q 、r 、s 称为透视参数,若赋其非零数值即形成透视变换矩阵。
T =a b c p d e f q g h i r l m n s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦ 1.点的透视变换如图5.38所示,在y 轴上取一点E 为视点,投影面取xOz 面(V 面),E 点到V 面的距离记为d ,对于空间里任一点,D (x ,y ,z ) 与视点E 的连线DE 与V 面的交点为D '(x ',y ',z '),即为D 的透视投影,同样A 的透视投影为A ',B 的透视投影为B ',C 的透视投影为C '。
根据图5.38可以找到空间点坐标与点的透视投影坐标的关系。
图5.37 透视投影 图5.38 透视投影坐标关系 因为△BCE 与△B 'C 'E 相似,所以,'x d x y d =−+,即'1x x y d=−。
同理可得: 'z d z y d =−+,即'1z z y d=− 设1q d =−,则'1x x qy =+,'1z z qy=+ 若用矩阵表示上述关系式,则有。