信号与系统78266
- 格式:doc
- 大小:832.51 KB
- 文档页数:13

信号与系统概念公式11总结.doc信号与系统概念公式总结引言信号与系统是电子工程和信号处理领域的基础概念,它们涉及信号的分析、处理和变换。
在本文档中,我们将总结信号与系统的基本概念、分类和相关的数学公式。
信号的分类1. 连续时间信号与离散时间信号连续时间信号:信号值随时间连续变化,通常用函数 ( x(t) ) 表示。
离散时间信号:信号值在离散的时间点上定义,通常用序列 ( x[n] ) 表示。
2. 确定性信号与随机信号确定性信号:信号的值可以通过确定的数学关系预测。
随机信号:信号的值具有随机性,通常需要通过统计方法来描述。
3. 能量信号与功率信号能量信号:信号的能量总和是有限的,即 ( \int_{-\infty}^{\infty} |x(t)|^2 dt < \infty )。
功率信号:信号的平均功率是有限的,即 ( \lim_{T \to \infty}\frac{1}{2T} \int_{-T}^{T} |x(t)|^2 dt < \infty )。
系统的定义系统可以被定义为将输入信号转换为输出信号的数学模型。
系统通常具有以下特性:1. 线性如果系统满足加法和标量乘法的属性,即对于任意的输入信号( x_1(t) ) 和 ( x_2(t) ) 以及任意常数 ( a ) 和 ( b ),有:[ y_1(t) = ax_1(t) + bx_2(t) ]则系统是线性的。
2. 时不变性如果系统的时间响应不随时间变化而变化,即对于任意的 ( t_0 ) 有:[ y(t) = x(t-t_0) ]则系统是时不变的。
3. 因果性如果系统的输出仅依赖于当前和过去的输入值,即 ( y(t) ) 仅由( x(t) ) 在 ( t \leq t_0 ) 的值决定,则系统是因果的。
信号与系统的数学工具1. 傅里叶变换傅里叶变换是分析连续时间信号的有力工具,其定义为:[ X(f) = \int_{-\infty}^{\infty} x(t) e^{-j2\pi ft} dt ] 2. 拉普拉斯变换拉普拉斯变换是分析线性时不变系统的重要工具,其定义为:[ X(s) = \int_{0}^{\infty} x(t) e^{-st} dt ]3. Z变换Z变换用于分析离散时间信号,其定义为:[ X(z) = \sum_{n=-\infty}^{\infty} x[n] z^{-n} ]线性时不变系统线性时不变系统(LTI系统)是信号处理中的核心概念。
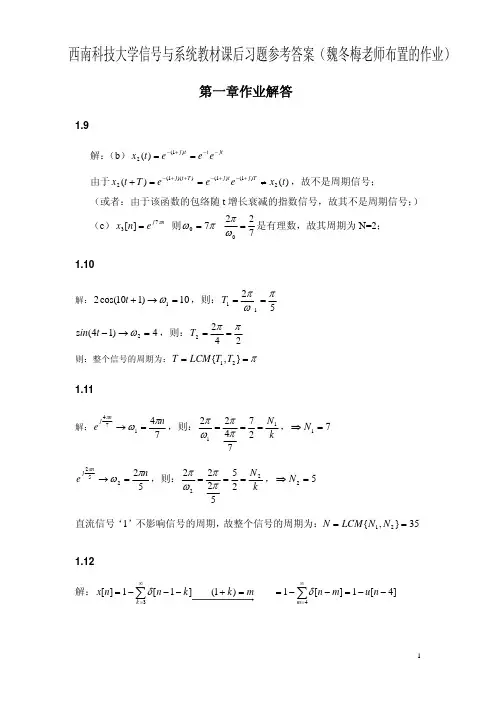
信号与系统第一章 信号与系统分析导论 1、 周期信号与非周期信号 连续时间周期信号定义: 存在正数T ,使得 成立,则 f (t) 为周期信号。
离散时间周期信号定义: ∀k ∈I , 存在正整数N ,使得 成立,则 f [k] 为周期信号。
2、能量信号 与 功率信号➢ 能量信号: 0 < W < ∞,P = 0。
➢ 功率信号: W → ∞,0 < P < ∞。
归一化能量W 与 归一化功率P连续信号离散信号直流信号与周期信号都是功率信号。
注意:一个信号可以既不是能量信号也不是功率信号,但不可能既是能量信号又是功率信号。
3、系统是指由相互作用和依赖的若干事物组成的、具有特定功能的整体。
(1).连续时间系统与离散时间系统连续时间系统:系统的输入激励与输出响应都必须为连续时间信号☐ 连续时间系统的数学模型是微分方程式。
f (t )y (t )R∈∀t )()(t f T t f =+][][k f N k f =+⎰-∞→=TT T t t f W d )(lim 2∑-∞→=NNN k f W ][lim 2➢ 离散时间系统:系统的输入激励与输出响应都必须为离散时间信号☐ 离散时间系统的数学模型是差分方程式。
(2).线性系统与非线性系统线性系统:具有线性特性的系统。
线性特性 包括 均匀特性 与 叠加特性 。
1) 均匀特性:2) 叠加特性:同时具有均匀特性与叠加特性方为线性特性 线性特性可表示为(其中 α 、β 为任意常数)其中 α 、β 为任意常数具有线性特性的离散时间系统可表示为(其中 α,β 为任意常数)含有初始状态线性系统的定义: 连续时间系统:若则离散时间系统:若 则结论:具有初始状态的线性系统,输出响应等于零输入响应与零状态响应之和。
因此,判断一个系统是否为线性系统,应从三个方面来判断:)()()0()()0()(212211t y b t y a x t f b x t f a T +=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡ϖϖ离散系统y [k ]f [k ])()(11t y t f −−−→−若)()(11t Ky t Kf −−−→−则)()(),()(2211t y t f t y t f −−−→−−−−→−若)()()()(2121t y t y t f t f +−−−→−+则)()(),()(2211t y t f t y t f −→−−→−)()()()(2121t y t y t f t f ⋅+⋅−→−⋅+⋅βαβα][][],[][2211k y k f k y k f −→−−→−][][][][2121k y k y k f k f ⋅+⋅−→−⋅+⋅βαβα)()0()(111t y x t f T =⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡ϖ)()0()(222t y x t f T =⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡ϖ][]0[][111k y x k f T =⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡ϖ][]0[][222k y x k f T=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡ϖ][][]0[][]0[][212211k y b k y a x k f b x k f a T +=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡ϖϖ)()()(t y t y t y f x +=)()()(t y t y t y f x +=1)、具有可分解性2)、零输入线性,系统的零输入响应必须对所有的初始状态呈现线性特性。
3)、零状态线性,系统的零状态响应必须对所有的输入信号呈现线性特性。
4、判断系统是否线性应注意的问题:1).在判断可分解性时,应考察系统的完全响应y(t)是否可以表示为两部分之和,其中一部分只与系统的初始状态有关,而另一部分只与系统的输入激励有关。
2).在判断系统的零输入响应yx(t)是否具有线性时,应以系统的初始状态为自变量(如上述例题中y(0)),而不能以其它的变量(如t 等)作为自变量。
3).在判断系统的零状态响应yf(t)是否具有线性时,应以系统的输入激励为自变量(如上述例题中f(t)),而不能以其它的变量(如t 等)作为自变量。
5、时不变系统与时变系统:系统的输出响应与输入激励的关系不随输入激励作用于系统的时间起点而改变,就称为时不变系统。
否则,就称为时变系统。
1)时不变特性:时不变的连续时间系统表示为时不变的离散时间系统表示为线性时不变系统可由定常系数的线性微分方程式或差分方程式描述。
(判断一个系统是否为时不变系统,只需判断当输入激励f(t)变为f(t-t0)时,相应的输出响应y(t)是否也变为 y(t-t0)。
由于系统的时不变特性只考虑系统的零状态响应,因此在判断系统的时不变特性时,不涉及系统的初始状态。
) 6、因果系统与非因果系统➢ 因果系统:当且仅当输入信号激励系统时才产生系统输出响应的系统。
➢ 非因果系统:不具有因果特性的系统称为非因果系统。
7、稳定系统与不稳定系统)()(t y t f f −→−)()(00t t y t t f f -−→−-][][k y k f f −→−][][n k y n k f f -−→−-➢ 稳定系统:指有界输入产生有界输出的系统。
BIBO :Bounded Input, BoundedOutput➢ 不稳定系统:系统输入有界而输出无界。
第二章 信号的时域分析1、典型普通信号 1)直流信号2)正弦信号 A: 振幅 w0:角频率 j :初始相位2、连续时间信号的基本运算1).尺度变换:f(t) → f(at) a>0。
若0<a<1,则f(at)是f(t)的扩展。
若a>1,则f(at)是f(t)的压缩。
2)信号的翻转 f(t) → f(-t)。
3).时移(平移) f(t) → f(t ±t0):f(t-t0)表示信号右移t0单位;f(t+t0)表示信号左移t0单位。
4)f2(t)+ ……+fn(t)。
5)信号的相乘:f (t) = f1(t) · f2(t)。
6)信号的微分:y(t) = df(t)/dt = f '(t)。
7).信号的积分:3、信号的分解:1).信号分解为直流分量与交流分量:连续时间信号;离散时间信号23).信号分解为实部分量与虚部分量:连续时间信号:4).连续信号分解为冲激函数的线性组合∑=+-=21][11][12DC N N k k f N N k f ][][][AC DC k f k f k f +=⎰-=b a tt f a b t f d )(1)(DC +∞<<∞-=t A t f ,)()sin()(0ϕω+=t A t f (1)()()d ()ty t f f t ττ--∞=⋅=⎰)()()(o e t f t f t f +=)()(e e t f t f -=)()(oo t f t f --=)(j )()(i r t f t f t f ⋅+=)(j )()(*i r t f t f t f ⋅-=)](*)([21)(r t f t f t f +=)](*)([j21)(i t f t f t f -=ΛΛ+∆--∆-∆+∆--+≈)]2()()[()]()()[0()(t u t u f t u t u f t f Λ+∆-∆--∆-∆+)]()()[(k t u k t u k f ∆∆∆-∆--∆-∆=∑∞-∞=)]()([)()(k t u k t u k f t f k ττδτd )()()(-=⎰∞∞-t f t f54、离散时间信号的基本运算:1). 翻转 、f [k] →f [-k] 2). 位移 f [k] → f [k ±n]:f [k-n]表示将f [k]右移n 个单位3). 为正整数(在原序列中每隔M-1点抽取一点) 内插: 在序列两点之间插入L-1个点4). 序列相加5). 序列相乘6).差分:单位脉冲序列可用单位阶跃序列的差分表示7). 求和 单位阶跃序列可用单位脉冲序列的求和表示第三章 系统的时域分析1、线性时不变系统的描述及特点由于LTI 系统具有线性特性和时不变特性,因此具有1)微分特性或差分特性:若 T{ f(t)}=y(t) ,则 若 T{f[k]}= y[k],则 T{ f[k] -f[k-1]}= y[k] - y[k-1]∑-∞==kn n k u ][][δ]1[][][--=k u k u k δΛΛΛ+-++-+++-+=][][]1[]1[][]0[]1[]1[][n k n f k f k f k f k f δδδδ][][][][21k f k f k f k y n +++=K ][ ][][][21k f k f k f k y n ⋅⋅⋅=K ∑-∞==kn n f k y ][][ΛΛΛ+-++-+++-+=][][]1[]1[][]0[]1[]1[][n k n f k f k f k f k f δδδδ2)积分特性或求和特性:若 T{ f(t)}=y(t),则若 T{f[k]}= y[k],则2、经典时域分析方法:微分方程的全解即系统的完全响应, 由齐次解yh(t)和特解yp(t)组成 (齐次解yh(t)的形式由齐次方程的特征根确定,特解yp(t)的形式由方程右边激励信号的形式确定)。
1)齐次解yh(t)的形式(1) 特征根是不等实根 s1, s2, ⋯, sn ,(2) 特征根是等实根 s1=s2=⋯=sn =s , (3) 特征根是成对共轭复根2][]}[{n y n f T kn kn ∑∑-∞=-∞==ττττd )(}d )({y f T tt⎰⎰∞-∞-=)()()(p h t y t y t y +=t s n t s t s n K K K t y e e e )(2121h +++=Λts n n t s t s t K t K K t y 1 2 1h e e e )(-+++=Λ2/,j n i s i i i =±=ωσ)sin cos (e )sin cos (e )(11211h 1t K t K t K t K t y i n i n t t i ωωωωσσ++++=-Λ3、系统的几个概念:1)系统完全响应=固有响应+强迫响应固有响应:仅依赖于系统本身的特性,而和激励信号的形式无关的部分,也即是齐次解。
强迫响应:由激励信号确定的部分,即是特解。
2)系统完全响应 = 暂态响应 + 稳态响应暂态响应:指系统完全响应中随时间的增加而很快衰减趋于零的部分。
稳态响应:指系统完全响应中不随时间的增加而衰减的部分。
4、卷积法:系统完全响应=零输入响应+零状态响应,✓ 求解齐次微分方程得到零输入响应,利用卷积积分可求出零状态响应1).系统的零输入响应是输入信号为零,仅由系统的初始状态单独作用而产生的输出响应。