运动目标跟踪(入门级) ppt课件
- 格式:ppt
- 大小:3.19 MB
- 文档页数:11
运动目标跟踪运动目标跟踪是一种利用计算机视觉技术来自动识别和追踪视频中的运动目标的方法。
它在实际应用中具有广泛的用途,例如视频监控、交通监控、自动驾驶等。
运动目标跟踪的目标是识别和跟踪视频中的感兴趣目标,并在目标移动、形状变化、遮挡等复杂场景下保持准确的跟踪。
跟踪的过程一般包括目标检测、目标定位和目标跟踪三个步骤。
首先,目标检测是从视频中检测出所有可能的目标区域。
常用的目标检测算法包括基于深度学习的目标检测算法,如Faster R-CNN、YOLO等。
这些算法可以快速准确地检测出目标区域,并生成候选框。
然后,目标定位是确定目标在当前帧中的准确位置。
目标定位一般采用基于特征的方法,通过计算目标候选框与目标模板之间的相似度来确定目标的位置。
常用的目标定位算法包括颜色直方图、HOG特征等。
这些算法可以通过算法模型进行目标定位,并快速准确地输出目标的位置。
最后,目标跟踪是在视频序列中持续追踪目标,并在目标发生变化或遮挡时进行目标重新定位和跟踪。
常用的目标跟踪算法包括基于粒子滤波器的跟踪算法、卡尔曼滤波器跟踪算法等。
这些算法可以利用目标模型和观测模型进行目标跟踪,并实时更新目标的位置和状态。
运动目标跟踪的关键技术包括目标检测和定位、目标跟踪和状态估计、特征提取和匹配等。
当前,随着深度学习技术的发展,基于深度学习的运动目标跟踪方法已经取得了很大的突破。
这些方法可以通过大规模的数据训练模型,实现更加准确和鲁棒的目标跟踪效果。
总之,运动目标跟踪是一种利用计算机视觉技术来自动识别和追踪视频中的运动目标的方法。
它在实际应用中具有广泛的用途,并且随着深度学习技术的发展,其性能和效果正在不断提高。
将来,运动目标跟踪技术有望在各个领域得到更广泛的应用。
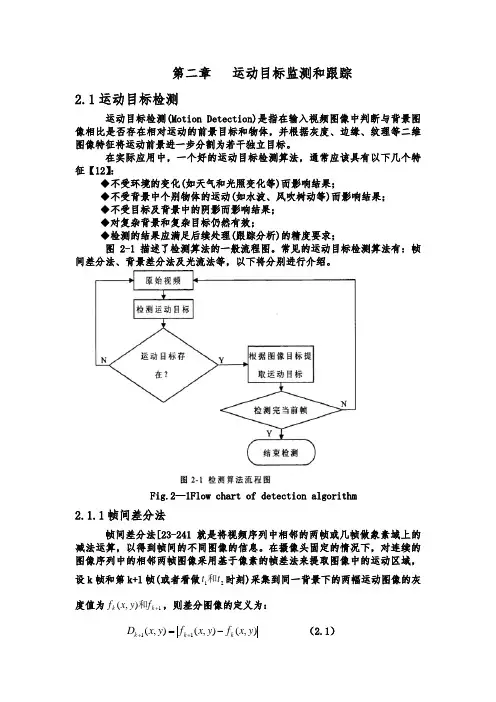
第二章运动目标监测和跟踪2.1运动目标检测运动目标检测(Motion Detection)是指在输入视频图像中判断与背景图像相比是否存在相对运动的前景目标和物体,并根据灰度、边缘、纹理等二维图像特征将运动前景进一步分割为若干独立目标。
在实际应用中,一个好的运动目标检测算法,通常应该具有以下几个特征【12】:◆不受环境的变化(如天气和光照变化等)而影响结果;◆不受背景中个别物体的运动(如水波、风吹树动等)而影响结果;◆不受目标及背景中的阴影而影响结果;◆对复杂背景和复杂目标仍然有效;◆检测的结果应满足后续处理(跟踪分析)的精度要求;图2-1描述了检测算法的一般流程图。
常见的运动目标检测算法有:帧间差分法、背景差分法及光流法等,以下将分别进行介绍。
Fig.2—1Flow chart of detection algorithm2.1.1帧间差分法帧间差分法[23-241就是将视频序列中相邻的两帧或几帧做象素域上的减法运算,以得到帧间的不同图像的信息。
在摄像头固定的情况下,对连续的图像序列中的相邻两帧图像采用基于像素的帧差法来提取图像中的运动区域,设k 帧和第k+l 帧(或者看做21t t 和时刻)采集到同一背景下的两幅运动图像的灰度值为1),(+k k f y x f 和,则差分图像的定义为:),(),(),(11y x f y x f y x D k k k -=++ (2.1)对上式的差分结果进行阈值处理,就可以提取出运动物体。
对差分图像),(y x f d 二值化,当某一像素的灰度值大于给定阈值T 时,认为该像素为目标像素,即该像素属于运动目标;反之,则属于背景。
这一步的目的就是为了区分背景像素和目标像素,得到:T y x D T y x D k k k y x R >≤+++=),(),(10111{),( (2.2)其中,l 表示前景像素值,0表示背景像素值。
然后再对),(1y x R k +进行连通性分析,就可以得到连通区域的面积。
第三章运动目标跟踪方法3.1 引言运动目标跟踪是机器视觉领域内一个备受关注的课题,图像中运动目标的跟踪技术通常是通过目标检测来进行跟踪。
运动目标的跟踪就是在视频图像的每一幅图像中确定出我们感兴趣的运动目标的位置,来实现目标的跟踪。
在机器视觉研究领域里,随着技术不断发展,自动目标跟踪(ATR)越来越受到研究者的重视,具有广阔的应用前景。
运动目标的跟踪在虚拟现实、工业控制、军事设备、医学研究、视频监控、交通流量观测监控等很多领域都有重要的实用价值。
特别在军事上,先进的武器导航、军事侦察和监控中都成功运用了自动跟踪技术。
而跟踪的难点在于如何快速而准确的在每一帧图像中实现目标定位。
3.2 单一摄像头常见跟踪方法简介基于视频的目标检测、跟踪等技术的发展,使得摄像头系统的应用越来越广泛,其研究也越来越深入。
从单一摄像头到多摄像头的场景监控,监控技术越来越成熟,下面就两类目标跟踪问题进行研究。
目前,根据不同跟踪方法可分类为如下几类。
1、基于区域的跟踪基于区域的跟踪是根据图像中对应于运动目标区域的变化来实现跟踪。
运动区域一般通过背景图像与当前帧图像比较来获取,因此需要对背景图像动态更新,难点在于处理运动目标的影子和遮挡情况。
基于区域的跟踪方法目前已有较多的应用,如Wren利用小区域特征进行室内单人的跟踪,将人体看作由头、躯干、四肢等身体部分所对应的小区域块所组成,重庆邮电大学硕士论文第二章运动目标检测与跟踪理论基础利用高斯分布建立人体和场景的模型,属于人体的像素被规划于不同的身体部分,通过跟踪各个小区域来完成整个人的跟踪;McKenna等将跟踪过程建立在区域、人、人群三个抽象级别上执行,区域可以合并和分离,而人是由许多身体部分区域在满足几何约束的条件下组成的,同时人群又是由单个的人组成的,因此利用区域跟踪器并结合人的表面颜色模型,在遮挡情况下也能够较好地完成多人的跟踪。
但是在复杂情况下,基于区域的跟踪方法还缺乏可靠性,并且不能很好地获取物体的3D位置、方位。

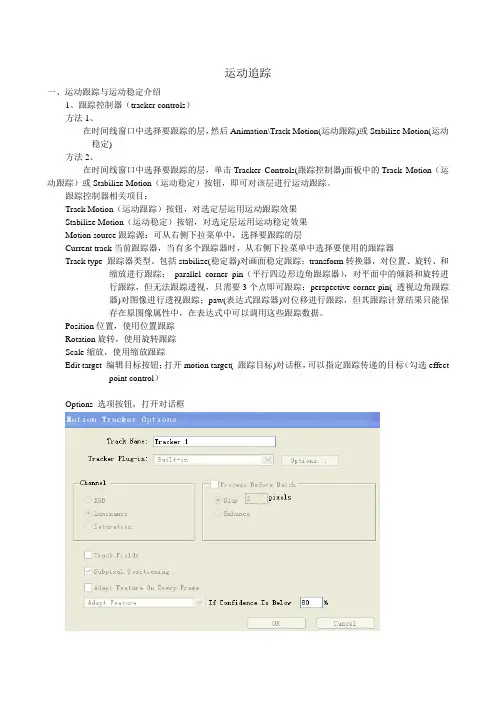
运动追踪一、运动跟踪与运动稳定介绍1、跟踪控制器(tracker controls)方法1、在时间线窗口中选择要跟踪的层,然后Animation\Track Motion(运动跟踪)或Stabilize Motion(运动稳定)方法2、在时间线窗口中选择要跟踪的层,单击Tracker Controls(跟踪控制器)面板中的Track Motion(运动跟踪)或Stabilize Motion(运动稳定)按钮,即可对该层进行运动跟踪。
跟踪控制器相关项目:Track Motion(运动跟踪)按钮,对选定层运用运动跟踪效果Stabilize Motion(运动稳定)按钮,对选定层运用运动稳定效果Motion source跟踪源:可从右侧下拉菜单中,选择要跟踪的层Current track当前跟踪器,当有多个跟踪器时,从右侧下拉菜单中选择要使用的跟踪器Track type 跟踪器类型。
包括stabilize(稳定器)对画面稳定跟踪;transform转换器,对位置、旋转、和缩放进行跟踪;parallel corner pin(平行四边形边角跟踪器),对平面中的倾斜和旋转进行跟踪,但无法跟踪透视,只需要3个点即可跟踪;perspective corner pin( 透视边角跟踪器)对图像进行透视跟踪;paw(表达式跟踪器)对位移进行跟踪,但其跟踪计算结果只能保存在原图像属性中,在表达式中可以调用这些跟踪数据。
Position位置,使用位置跟踪Rotation旋转,使用旋转跟踪Scale缩放,使用缩放跟踪Edit target 编辑目标按钮;打开motion target( 跟踪目标)对话框,可以指定跟踪传递的目标(勾选effect point control)Options 选项按钮,打开对话框:包括RGB 亮度通道和饱和度通道Process before match 在追踪程序前处理BlurEnhance 提高:锐化边界,使其更容易追踪Track Fields追踪场,使帧速率倍增,保证隔行扫描的两个视频场都能追踪Subpixel positioning子像素定位:将特征区域中的像素划分的更细小,以获得更精确的追踪,但需要更多的时间Adapt feature if confidence is below -%(如果精度低于-%指定的运动宽容度,则使用惯性推测特征区域的位置Extrapolate motion推算运动Analyze 分析:用来分析跟踪。