9.1杠杆及其平衡条件
- 格式:ppt
- 大小:649.00 KB
- 文档页数:17
机械杠杆和平衡条件一、杠杆的定义与分类杠杆是一种简单机械,它是一种硬棒,能够在固定点(支点)处转动。
根据杠杆的动力臂和阻力臂的长度关系,杠杆可分为以下三种类型:1.一级杠杆:动力臂等于阻力臂,如天平。
2.二级杠杆:动力臂小于阻力臂,如撬棍。
3.三级杠杆:动力臂大于阻力臂,如杠杆秤。
二、杠杆的平衡条件杠杆的平衡条件是指在杠杆转动过程中,保持平衡的条件。
杠杆的平衡条件可以用力矩的概念来描述,即杠杆两侧的力矩相等。
杠杆的平衡条件公式为:F1 * L1 = F2 * L2其中,F1和F2分别为杠杆两侧的力,L1和L2分别为力的作用点到支点的距离(即力臂)。
三、力臂的概念力臂是指力的作用点到支点的垂直距离。
在计算力矩时,力臂是关键因素。
力臂的长度决定了力对杠杆平衡的影响。
四、杠杆的应用杠杆在生活和生产中有着广泛的应用,如剪刀、钳子、撬棍等。
杠杆的原理可以帮助我们实现力的放大或方向的改变,从而更方便地进行工作。
五、杠杆的平衡状态杠杆的平衡状态包括静止平衡和转动平衡。
在静止平衡状态下,杠杆两侧的力和力矩相等,杠杆保持静止。
在转动平衡状态下,杠杆两侧的力和力矩相等,杠杆以固定点为中心进行转动。
六、杠杆的平衡保护杠杆的平衡保护是指在杠杆使用过程中,采取措施防止杠杆因外力作用而失去平衡。
平衡保护措施包括使用平衡螺母、设置限位装置等。
七、杠杆的优缺点杠杆的优点是可以节省力、提高工作效率,缺点是用力距离较大,且在使用过程中可能产生侧向力。
八、杠杆在现代科技中的应用杠杆原理在现代科技领域中有着广泛的应用,如机械臂、减速器、杠杆传感器等。
这些设备利用杠杆原理来实现力的传递、放大和控制。
机械杠杆和平衡条件是物理学中的重要知识点。
了解杠杆的定义、分类、平衡条件以及力臂的概念,能够帮助我们更好地理解和应用杠杆原理。
杠杆在生活和生产中的广泛应用,体现了物理学与实际生活的紧密联系。
习题及方法:1.习题:一个长度为1米的杠杆,在支点处受到一个10N的力,如果杠杆的另一端施加一个力使得杠杆保持平衡,那么这个力的大小是多少?解题思路:根据杠杆的平衡条件F1 * L1 = F2 * L2,其中F1为已知的力,L1为力臂长度,F2为要求的力,L2为力臂长度。
【教育机构专用】2022-2023学年八年级物理春季讲义(北师大版)课时9.1 杠杆(学生版)一、目标要求二、知识点解析1.杠杆:在力的作用下能绕着转动的硬棒,这根硬棒就叫。
(1)“硬棒”泛指有一定长度的,在外力作用下的物体。
(2)杠杆可以是直的,也可以是任何形状的。
2.杠杆的五要素:(1)支点:杠杆绕着转动的固定点,用字母“O”表示。
它可能在棒的某一端,也可能在棒的中间,在杠杆转动时,支点是相对;(2)动力:使杠杆的力叫动力,用“F1”表示;(3)阻力:杠杆转动的力叫阻力,用“F2”表示;(4)动l”表示;(5)阻力臂:从支点到阻力作用力臂:从支点到动力作用线的,用“1l”表示。
线的,用“2注意:无论动力还是阻力,都是作用在杠杆上的力,但这两个力的作用效果正好相反。
一般情况下,把人施加给杠杆的力或使杠杆按照人的意愿转动的力叫做,而把阻碍杠杆按照需要方向转动的力叫。
力臂是点到线的距离,而不是支点到力的的距离。
力的作用线通过支点的,其力臂为,对杠杆的转动不起作用。
3.杠杆示意图的画法:(1)根据题意先确定支点O;(2)确定动力和阻力并用虚线将其作用线延长;(3)从支点向力的作用线画垂线,并用l1和l2分别表示动力臂和阻力臂;第一步:先确定支点,即杠杆绕着某点转动,用字母“O”表示。
第二步:确定动力和阻力。
人的愿望是将石头翘起,则人应向下用力,画出此力即为动力用“F1”表示。
这个力F1作用效果是使杠杆逆时针转动。
而阻力的作用效果恰好与动力作用效果相反,在阻力的作用下杠杆应朝着顺时针方向转动,则阻力是石头施加给杠杆的,方向向下,用“F2”表示如图(2)所示。
第三步:画出动力臂和阻力臂,将力的作用线正向或反向延长,由支点向力的作用线作垂线,并标明相应的“l1”“l2”,“l1”“l2”分别表示动力臂和阻力臂,如图(3)所示。
(1)(2)(3)4.杠杆的平衡条件(1)杠杆的平衡:当杠杆在动力和阻力的作用下时,我们就说杠杆平衡了。
初中物理新授课“教案、学案一体化设计”案例----杠杆及其平衡条件课型新授课题杠杆课时 1 单位教学目标1、认识杠杆;能从常见的工具和简单机械中识别出杠杆。
2、知道杠杆的平衡条件及应用。
3、经历探究杠杆平衡条件的过程,学习分析实验现象,寻找数据间的规律,从中归纳出一般规律的方法。
4、认识科学探究中必须有合作精神。
教法杠杆的定义:学生结合身边实例,自主学习。
杠杆的五要素:结合杠杆的实际应用,自主学习,教师点拨。
杠杆的平衡条件:自主探究。
学法自主学习、实验探究、合作交流贯穿课堂始终。
教学程序设计教材处理设计师生活动设计教师:课前针对学生的准备进行批改检查,知道学生对这部分知识的预习、理解情况,以便课堂上有针对性的进行指导。
学生:课前认真复习、预习,做好准备,对不理解的知识点记录下来;上课时同桌互查课前复习、预习结果,然后小组代表演示并说明杠杆的各要素。
教师:针对课前的检查和课堂上的汇报情况,进行点拨。
学生:自主练习,做的好的同学当起小老师给部分同学指导教师:巡查批改并点拨一、直接导入新课(1min)二、自主、合作、探究学习(33min)1、杠杆的定义及五要素(10min)同桌互查课前复习、预习情况(2min)代表汇报预习成果教师点评(5min)巩固检测(3min)课前复习:(学案一)1、画力的示意图的要点是:从开始沿着画一条带的线段。
画出课本75页想想做做图中,人施加的动力的示意图,石块对木棒施加的阻力的示意图。
2、温故上学期学过的天平使用前如何调节使天平在位置平衡。
课前预习:1、阅读课本74页回答:什么是杠杆?仔细观察家用的酒起子、剪刀、羊角锤、铁撬在使用时的特点,从它们身上你看到杠杆的影子了吗?家中的用品中还有哪些是应用杠杆的?选五件带到学校来。
2、阅读课本75页(1)结合图9.1—4认识杠杆的五要素,并指出你所选的工具在使用时它的各要素分别在哪?(友情提示:动力、阻力的作用线其实就是动力、阻力的示意图)。
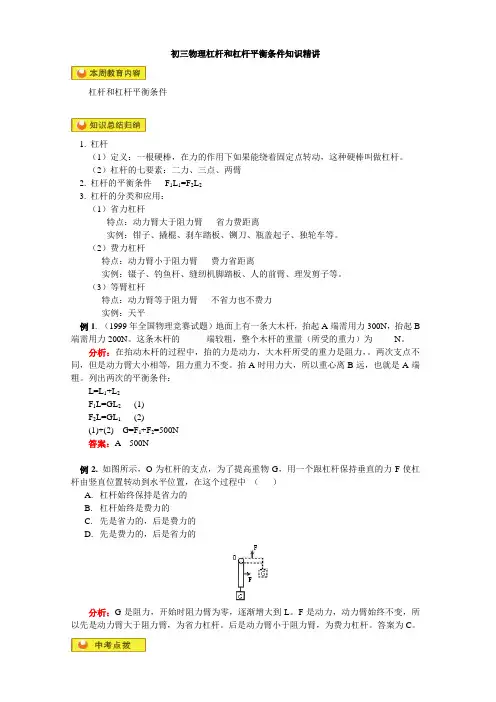
初三物理杠杆和杠杆平衡条件知识精讲杠杆和杠杆平衡条件1. 杠杆(1)定义:一根硬棒,在力的作用下如果能绕着固定点转动,这种硬棒叫做杠杆。
(2)杠杆的七要素:二力、三点、两臂2. 杠杆的平衡条件F1L1=F2L23. 杠杆的分类和应用:(1)省力杠杆特点:动力臂大于阻力臂省力费距离实例:钳子、撬棍、刹车踏板、铡刀、瓶盖起子、独轮车等。
(2)费力杠杆特点:动力臂小于阻力臂费力省距离实例:镊子、钓鱼杆、缝纫机脚踏板、人的前臂、理发剪子等。
(3)等臂杠杆特点:动力臂等于阻力臂不省力也不费力实例:天平例1. (1999年全国物理竞赛试题)地面上有一条大木杆,抬起A端需用力300N,抬起B 端需用力200N。
这条木杆的______端较粗,整个木杆的重量(所受的重力)为_____N。
分析:在抬动木杆的过程中,抬的力是动力,大木杆所受的重力是阻力,。
两次支点不同,但是动力臂大小相等,阻力重力不变。
抬A时用力大,所以重心离B远,也就是A端粗。
列出两次的平衡条件:L=L1+L2F1L=GL2(1)F2L=GL1(2)(1)+(2) G=F1+F2=500N答案:A 500N例2. 如图所示,O为杠杆的支点,为了提高重物G,用一个跟杠杆保持垂直的力F使杠杆由竖直位置转动到水平位置,在这个过程中()A.杠杆始终保持是省力的B.杠杆始终是费力的C.先是省力的,后是费力的D.先是费力的,后是省力的分析:G是阻力,开始时阻力臂为零,逐渐增大到L。
F是动力,动力臂始终不变,所以先是动力臂大于阻力臂,为省力杠杆。
后是动力臂小于阻力臂,为费力杠杆。
答案为C。
例1:(1992年全国应用物理竞赛试题)为了避免杆秤损坏,制秤时在杆秤两端各包上质量相等或相近的两块小铜片。
现在秤尾的铜片脱落丢失,主人怕影响秤的准确性,把另一端的铜片也取了下来。
用这样的杆秤来称量,结果是()A. 称量时的读数比实际质量大B. 称量时的读书比实际质量小C. 不论两铜片的质量是否完全相等,都可以恢复秤的准确性D. 只有在两铜片的质量完全相等的情况下,才能恢复秤的准确性分析:将秤杆两端的铜包皮取去,秤的平衡将被破坏,由于秤尾距提扭(相当于转轴)较远,则该处铜包皮对提扭产生的力矩较大,估量端的铜包皮取走后,秤尾将向上翘起。


杠杆的平衡条件课后反思一、教学目标1. 让学生理解杠杆的平衡条件,即动力×动力臂=阻力×阻力臂。
2. 培养学生运用杠杆平衡条件解决实际问题的能力。
3. 引导学生通过实验和观察,发现杠杆平衡的规律。
二、教学内容1. 杠杆的平衡条件:动力×动力臂=阻力×阻力臂。
2. 实验操作:如何进行杠杆实验,观察和记录杠杆的平衡状态。
3. 实例分析:运用杠杆平衡条件解决实际问题,如撬棒、剪刀等。
三、教学重点与难点1. 教学重点:杠杆的平衡条件及其应用。
2. 教学难点:理解并运用杠杆平衡条件解决实际问题。
四、教学方法1. 实验法:引导学生进行杠杆实验,观察和记录杠杆的平衡状态。
2. 讲授法:讲解杠杆的平衡条件及其应用。
3. 案例分析法:分析实际生活中的杠杆现象,引导学生运用杠杆平衡条件解决问题。
五、教学过程1. 导入:通过一个简单的杠杆实验,引发学生对杠杆平衡条件的兴趣。
2. 新课讲解:讲解杠杆的平衡条件,引导学生理解并记忆。
3. 实例分析:分析实际生活中的杠杆现象,让学生学会运用杠杆平衡条件解决问题。
4. 小组讨论:让学生分组讨论,分享各自对杠杆平衡条件的理解和应用。
6. 课后作业:布置相关练习题,巩固学生对杠杆平衡条件的掌握。
课后反思:本节课通过实验、讲解和实例分析等多种教学方法,使学生掌握了杠杆的平衡条件,并能运用到实际问题中。
但在教学过程中,发现部分学生在理解动力臂和阻力臂的概念上还存在一定的困难。
在今后的教学中,可以考虑通过更直观的演示或引导学生进行更多的实践操作,以帮助学生更好地理解和掌握这一知识点。
也要注重培养学生的动手能力和团队协作精神,使他们在解决实际问题时能更加得心应手。
六、教学拓展1. 引导学生探讨杠杆的分类,如一级杠杆、二级杠杆和三级杠杆,并了解它们在生活中的应用。
2. 介绍杠杆的平衡调节方法,如如何通过改变力的大小、力臂的长度或改变杠杆的长度来使杠杆平衡。