人机工程学图书推荐
- 格式:pptx
- 大小:350.76 KB
- 文档页数:3

人机工程学教材以下是一些著名的人机工程学教材:1. "人机工程学导论" (Introduction to Human Factors Engineering) by Christopher Wickens, John Lee, Yili Liu, and Sallie E. Gordon-Becker该教材覆盖了人机交互的基本概念,包括认知心理学、人的错误和人机界面设计等重要主题。
2. "人机工程学导论:认知工程学与用户界面设计" (Cognitive Engineering and User Interface Design) by Andrew Sears and Julie A. Jacko该教材综合了人机工程学和认知工程学的理论,强调认知心理学的应用于用户界面设计的重要性。
3. "设计人类心理人机工效学" (Designing for People: An Introduction to Human Factors Engineering) by John D. Lee and Christopher D. Wickens该教材介绍了人机工效学的基本原则和方法,包括心理学、认知领域和工程设计的基础知识。
4. "人因工程:成功的设计" (Human Factors Engineering: Successful Design for Safety) by John D. Lee and Christopher D. Wickens该教材侧重于人因工程在安全设计方面的应用,包括人机交互的安全性评估、人机界面设计和操作员训练等。
5. "工效学" (Engineering Psychology and Human Performance)by Christopher D. Wickens, Justin G. Hollands, Simon Banbury, and Raja Parasuraman该教材探讨了认知心理学和人机工程学在解决实际问题中的应用,包括设计有效的人机界面和提高工作效率等方面。
国际机器人专业的名著【原创版】目录1.引言:介绍国际机器人专业的名著2.《机器人学:模型、规划与控制》3.《机器人操作系统》4.《机器人视觉》5.《机器人动力学与控制》6.《机器人学:从几何到控制》7.结论:总结这些名著的重要性正文机器人学作为一门跨学科领域,在国际上备受关注。
为了更好地学习和研究机器人学,了解一些国际机器人专业的名著是非常有帮助的。
本文将介绍几本著名的机器人学著作,包括《机器人学:模型、规划与控制》、《机器人操作系统》、《机器人视觉》、《机器人动力学与控制》和《机器人学:从几何到控制》。
首先,《机器人学:模型、规划与控制》是一本非常全面的教材,覆盖了机器人学的基础理论、建模、规划和控制等方面的内容。
这本书的作者深入浅出地讲解了机器人学的基本概念,使得读者能够更好地理解机器人学的相关知识。
接下来,《机器人操作系统》这本书主要关注机器人软件方面的内容。
它详细地介绍了机器人操作系统的设计和实现,以及如何在实际应用中对机器人进行控制。
这本书对于那些想要深入了解机器人软件开发的读者来说非常有价值。
《机器人视觉》这本书则专注于机器人视觉系统的研究。
作者详细地讲解了机器人视觉系统的构成、原理和实现方法,以及如何利用视觉系统来提高机器人的感知和决策能力。
这本书对于那些想要研究机器人感知领域的读者来说是一本很好的教材。
另外,《机器人动力学与控制》这本书主要探讨了机器人的动力学和控制问题。
作者从理论和实际应用两个方面对机器人的动力学和控制进行了深入研究,为读者提供了丰富的案例和实践经验。
最后,《机器人学:从几何到控制》这本书从几何和控制的角度全面讲解了机器人学的相关知识。
作者通过讲解机器人的几何建模、运动学和动力学等方面的内容,为读者提供了一个全新的视角来认识机器人学。
总之,上述这些国际机器人专业的名著对于学习和研究机器人学领域具有很大的帮助。
从基础理论到实际应用,这些著作都为读者提供了丰富的知识和经验。
中学机器人课程书籍
以下是一些适合中学生的机器人课程书籍:
1. 《中学机器人启蒙课程》- 作者:李学钧
这本书是中国著名机器人教育专家李学钧编写的,适合中学生入门学习机器人。
它包含了机器人基础知识、编程技巧以及机器人项目实践等内容。
2. 《机器人创新实践教程》- 作者:杨国才、赵海龙、郑晓洁
这本书是一本综合性的中学机器人教材,包含了机器人的基础知识、编程技巧和实践项目等内容。
它还提供了丰富的案例和实验,帮助学生深入理解机器人原理和应用。
3. 《机器人技术与应用》- 作者:陈希仁、吴志航、刘启扬
这本书是一本系统性的中学机器人教材,包含了机器人的基础理论、传感器技术、运动控制、图像识别及应用等内容。
它还提供了丰富的实例和实践项目,帮助学生培养机器人设计和编程的能力。
4. 《机器人与单片机应用技术》- 作者:黄国宝
这本书主要介绍了机器人控制中使用的单片机技术,包括单片机的基本原理、编程方法和应用技巧等。
它还提供了一些实际的机器人项目,帮助学生将所学知识应用到实践中。
5. 《机器人学导论》- 作者:曾国权
这本书是一本较为专业的机器人教材,适合有一定基础的中学生学
习。
它包含了机器人学的基本概念、运动学、轨迹规划、传感器技术等内容,帮助学生深入了解机器人的原理和应用。
这些书籍都是针对中学生的机器人课程编写的,可以根据自己的兴趣和水平选择适合的教材进行学习。
与机械有关的课外书籍摘要:1.引言2.推荐书籍一:《机械设计手册》2.1 书籍简介2.2 内容特点2.3 适用人群3.推荐书籍二:《机械原理》3.1 书籍简介3.2 内容特点3.3 适用人群4.推荐书籍三:《机器人技术基础》4.1 书籍简介4.2 内容特点4.3 适用人群5.总结正文:在众多与机械有关的课外书籍中,本文将推荐三本具有代表性的经典之作。
这些书籍分别涵盖了机械设计、机械原理和机器人技术等领域,旨在帮助读者更好地了解和掌握机械知识。
1.推荐书籍一:《机械设计手册》《机械设计手册》是一本实用性很强的机械设计指南。
该书详细介绍了机械设计的基本原则、设计方法和计算公式,以及各种机械零部件的设计方法和实例。
此外,书中还附有大量图表和数据,方便读者查阅和参考。
本书适用于机械设计工程师、技术人员以及相关专业的学生阅读和参考。
2.推荐书籍二:《机械原理》《机械原理》是一本系统阐述机械原理的教材。
该书从基本概念入手,深入浅出地讲解了力学、机构学、机械零件等方面的内容。
书中实例丰富,既有理论分析,也有实践应用,旨在帮助读者建立起完整的机械原理知识体系。
本书适用于机械类专业的学生以及相关领域的工程师和技术人员学习。
3.推荐书籍三:《机器人技术基础》《机器人技术基础》是一本关于机器人技术的专业教材。
该书从机器人技术的发展历程、基本原理和应用领域等方面进行了全面介绍。
书中既有理论讲解,也有实践操作,让读者能够深入了解机器人的构造、控制和编程等方面的知识。
本书适用于机器人技术研究人员、工程师以及相关专业的学生阅读。
总之,以上三本书籍都是与机械相关的经典之作。
无论您是初学者还是专业人士,都能在这些书籍中找到适合自己的学习内容。
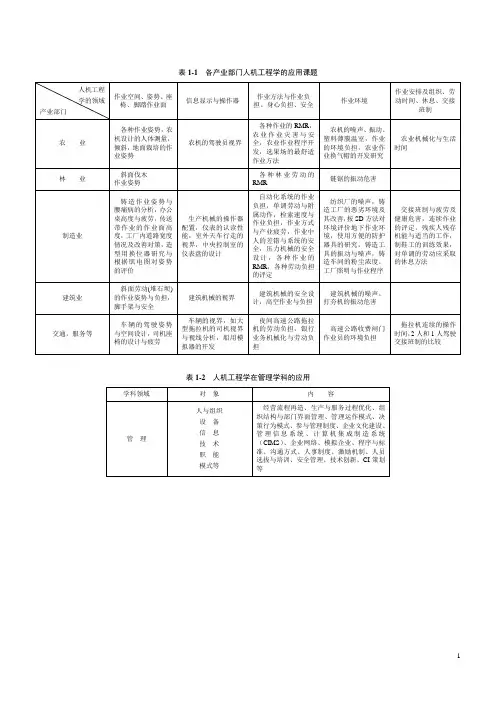
表1-1各产业部门人机工程学的应用课题表1-2人机工程学在管理学科的应用表1-3人机工程学与工业设计相关的研究领域表1-4工业设计各阶段中人机工程设计工作程序规划阶段(准备阶段)1. 考虑产品与人及环境的全部联系,全面分析人在系统中的具体作用;2. 明确人与产品的关系,确定人与产品关系中各部分的特性及人机工程要求的设计内容;3. 根据人与产品的功能特性,确定人与产品功能的分配1. 从人与产品、人与环境方面进行分析,在提出的众多方案中按人机工程学原理进行分析比较;2. 比较人与产品的功能特性、设计限度、人的能力限度、操作条件的可靠性以及效率预测,选出最佳方案;3. 按最佳方案制作简易模型,进行模拟试验,将试验结果与人机工程学要求进行比较,并提出改进意见;4. 对最佳方案写出详细说明:方案获得的结果、操作条件、操作内容、效率、维修的难易程度、经济效益、提出的改进意见1. 从人的生理、心理特性考虑产品的构形;2. 从人体尺寸、人的能力限度考虑确定产品的零部件尺寸;3. 从人的信息传递能力考虑信息显示与信息处理;4. 根据技术设计确定的构形和零部件尺寸选定最佳方案,再次制作模型,进行试验;5. 从操作者的身高、人体活动范围、操作方便程度等方面进行评价,并预测还可能出现的问题,进一步确定人机关系可行程度,提出改进意见表2-1百分比与变换系数表2-2人体主要尺寸1.1身高/mm1.2体重/kg1.3上臂长/mm1.4前臂长/mm1.5大腿长/mm1.6小腿长/mm表2-3立姿人体尺寸表2-4坐姿人体尺寸表2-5人体水平尺寸表2-6六个区域的身高、胸围、体重的均值x及标准差S D表2-7香港地区成人人体尺寸mm表2-8我国成人男女上肢功能尺寸mm表2-9主要人体尺寸的应用原则确定上述高度时必须考虑活动的性质,有时这一点比推荐的“低于肘部高度7.6 cm”还重要表2-10产品尺寸设计分类表2-11人体尺寸百分位数的选择表2-12正常人着装身材尺寸修正值mm表2-13设备及用具的高度与身高的关系表3-1不同感觉通道的适用场合感觉通道适用场合视觉通道1. 传递比较复杂的或抽象的信息2. 传递比较长的或需要延迟的信息3. 传递的信息以后还要引用4. 传递的信息与空间方位、空间位置有关5. 传递不要求立即作出快速响应的信息6. 所处环境不适合使用听觉通道的场合7. 虽适合听觉传递,但听觉通道已过载的场合8. 作业情况允许操作者固定保持在一个位置上听觉通道1. 传递比较简单的信息2. 传递比较短的或无需延迟的信息3. 传递的信息以后不再需要引用4. 传递的信息与时间有关5. 传递要求立即作出快速响应的信息6. 所处环境不适合使用视觉通道的场合7. 虽适合视觉传递,但视觉通道已过载的场合8. 作业情况要求操作者不断走动的场合触觉通道1. 传递非常简明的、要求快速传递的信息2. 经常要用手接触机器或其装置的场合3. 其他感觉通道已过载的场合4. 使用其他感觉通道有困难的场合表3-2几种工作任务视距的推荐值任务要求举例视距离(眼至视觉对象)/cm 固定视野直径/cm 备注最精细的工作安装最小部件(表、电子元件)12~25 20~40完全坐着,部分地依靠视觉辅助手段(小型放大镜、显微镜)精细工作安装收音机、电视机25~35(多为30~32)40~60 坐着或站着中等粗活在印刷机、钻井机、机床旁工作50以下至80 坐或站粗活包装、粗磨50~150 30~250 多为站着远看看黑板、开汽车150以上250…坐或站表3-3人机工程学的视觉原则表3-4编码方式的优劣表4-1适宜刺激和识别特征表4-2记忆的解释表4-3有意记忆与无意记忆的特点表4-4机械记忆与意义记忆的特点表4-5瞬时、短时和长时记忆的特点表5-1重要活动范围和身体各部舒适姿势的调节范围注:给出的最大角度适于一般情况。
机器人设计涉及知识点的书机器人设计是一个综合性的学科领域,涉及到各种基础理论和技术知识。
为了全面了解和掌握机器人设计涉及的知识点,可以参考以下几本经典的相关书籍。
1. 《机器人学导论》这是一本系统全面介绍机器人学基础知识和技术的教材。
书中详细介绍了机器人学的相关概念、原理、算法和应用等内容,包括机器人的运动学、动力学、传感器和控制系统等方面的知识。
通过学习这本书,可以建立起对机器人学综合知识框架的基本理解。
2. 《机器人技术概论》这本书从机器人技术的发展历程出发,系统地介绍了机器人技术的基本理论、核心技术和应用领域。
书中包含了机器人的感知、运动控制、智能决策等方面的知识点,并重点介绍了最新的机器人技术发展趋势和前沿领域的研究进展。
3. 《机器人控制系统概论》这本书主要介绍了机器人控制系统的基本原理和设计方法。
包括机器人控制的基本概念、建模与仿真、运动控制和轨迹规划等方面的内容。
通过学习这本书,可以了解机器人控制系统的组成结构和工作原理,掌握常用的控制算法和设计方法。
4. 《机器人传感器与感知》这本书主要介绍了机器人感知技术的基本原理和常用传感器的工作原理。
内容包括机器人感知技术的分类和应用、传感器的工作原理和特点、感知数据的处理和融合等内容。
通过学习这本书,可以了解机器人感知技术的基本原理和常用传感器的选择和使用方法。
5. 《人工智能与机器人》这本书主要介绍了机器人与人工智能的关系和互补性。
内容包括机器人的智能化技术、感知与认知、学习与决策、人机交互等方面的知识点。
通过学习这本书,可以了解机器人与人工智能领域的交叉点和前沿研究方向,掌握机器人智能化设计的基本原理和方法。
除了以上几本经典著作外,还可以参考一些特定领域的书籍,如《工业机器人技术与应用》、《服务机器人技术与应用》等。
这些书籍涉及到机器人在特定领域的设计和应用,对于深入理解机器人技术的发展方向和应用前景都有很大的帮助。
总之,机器人设计涉及知识点的书籍很多,需要根据自己的学习需求和兴趣选择适合的书籍进行学习。
《人机工程学》丁玉兰的读书笔记《人机工程学》读书笔记《人机工程学》是丁玉兰教授编著的一本介绍人机工程学原理和应用的权威教材。
在这本书中,丁玉兰教授系统地介绍了人机工程学的定义、发展历程、基本原理以及应用领域等方面的知识。
通过阅读这本书,我对人机工程学的概念、研究方法和应用技术有了更加深入的理解。
本篇读书笔记将重点总结书中的重要内容和我个人的体会,并进行分析和评价。
第一章序言第一章是本书的序言部分,主要介绍了人机工程学的历史和发展背景。
丁玉兰教授在序言中指出,人机工程学是一门跨学科的综合科学,涉及心理学、工程学、计算机科学等多个学科的知识。
人机工程学的研究目标是通过深入理解人类的认知、行为和工作要求,设计和优化人机界面,使人机交互更加高效、安全和满意。
第二章人机工程学基础第二章是本书的第一章,介绍了人机工程学的基础知识。
首先,丁玉兰教授解释了人机工程学的定义和范围。
人机工程学是研究如何设计和评价人机界面的学科,涵盖了人机交互、界面设计、人因工程等多个方面。
其次,丁玉兰教授介绍了人机界面的分类和基本要素。
人机界面可以分为物理界面和虚拟界面,具有输入、输出和处理三个基本要素。
最后,丁玉兰教授介绍了人机工程学的研究方法和评价指标。
人机工程学研究方法包括实证研究、模拟研究和建模研究等,评价指标包括效能、易用性和满意度等。
第三章人的认知过程第三章介绍了人类的认知过程和认知心理学的基本原理。
丁玉兰教授认为,人类的认知过程可以分为感知、注意、记忆和思维四个阶段。
在感知阶段,人们通过感知器官接收和处理外界信息;在注意阶段,人们选择和集中注意力的对象;在记忆阶段,人们将信息存储和提取;在思维阶段,人们进行逻辑推理和问题解决。
此外,丁玉兰教授还介绍了认知心理学的研究方法和应用技术。
认知心理学主要研究人类的思维和记忆过程,通过实验和模型构建等方法来解释和预测人类的行为。
第四章人的行为特征第四章介绍了人的行为特征和行为测量的方法。
人机工程学潘鲁生教材重点
潘鲁生是人机工程学领域的专家,他的教材可能涵盖了人机工程学的多个方面。
人机工程学教材的重点包括以下内容:
导论与基础概念:介绍人机工程学的基本概念、历史和发展,包括人机交互的基本原理。
人的认知过程:探讨人类的感知、认知、记忆和问题解决等心理过程,以理解用户在使用技术时的行为和需求。
界面设计原则:强调设计界面时应考虑的原则,如可用性、可理解性、一致性和反馈等。
用户研究方法:介绍调查、观察、用户测试等方法,以了解用户需求和评估界面设计的有效性。
任务分析与建模:分析用户在特定任务中的行为,建立任务模型,为设计提供基础。
人机交互技术:包括交互式系统的设计、实施和评估,涉及软件和硬件的交互设计。
可持续性和人机工程学的应用: 探讨在设计中考虑可持续性和人机工程学原理的应用领域。
未来趋势和发展:对人机工程学领域的未来趋势、新兴技术和挑战进行讨论。
人机工程国外书籍以下是一些关于人机工程的国外书籍推荐:1. "The Design of Everyday Things" by Don Norman - 这是一本经典的人机工程学著作,讲述了人们如何与日常物品交互,以及如何改善设计以提高用户体验。
2. "Human-Computer Interaction" by Alan Dix, Janet Finlay, Gregory D. Abowd, and Russell Beale - 这本教科书是人机交互领域的权威之作,涵盖了用户界面设计、交互技术、用户研究等方面的内容。
3. "Interaction Design: Beyond Human-Computer Interaction" by Jennifer Preece, Yvonne Rogers, and Helen Sharp - 这本书主要关注设计交互的过程和方法,涵盖了用户研究、设计原则、用户体验评估等方面的内容。
4. "Designing for Interaction: Creating Innovative Applications and Devices" by Dan Saffer - 这本书讲述了如何设计具有创新性的应用程序和设备,涵盖了人机交互设计的基本原则和实践方法。
5. "Usability Engineering" by Jakob Nielsen - 这是一本关于用户测试和评估的经典书籍,涵盖了用户界面设计、可用性测试、用户研究等方面的内容。
6. "Designing with the Mind in Mind: Simple Guide to Understanding User Interface Design Rules" by Jeff Johnson - 这本书介绍了人类认知和感知的基本原则,以及如何将这些原则应用于用户界面设计。
丁玉兰人机工程学第五版《丁玉兰人机工程学第五版》是一本关于人机工程学的经典教材。
这是一本介绍人机交互设计和评估的权威教材。
它详细阐述了人机工程学领域的重要概念、原则和方法,并提供了丰富的实际案例和研究成果。
这本书分为六个部分,包括人机工程学概念与原则、人因工程设计、人机界面设计、人机交互评估、未来发展方向与展望等。
每个部分都从理论和实践角度进行深入探讨,非常全面地介绍了人机工程学的各个方面。
在第一部分,书中详细解释了人机工程学的定义和目标,并介绍了人机工程学的历史发展和应用领域。
通过对人机系统的结构和特性的阐述,读者对人机工程学的基本概念有了更深入的认识。
第二部分是关于人因工程设计的内容,这部分介绍了人的认知、心理和生理特性对系统设计的影响。
其中包括人类信息处理、控制论、决策过程等方面的内容。
这个部分对于理解人机交互设计的基本原则至关重要。
第三部分是人机界面设计,这是人机交互设计中最为重要的一个环节。
这部分从界面类型、交互模型、界面布局等方面给出了详细的指导和建议。
同时,还介绍了一些界面设计的原则和方法,如可用性原则、互动性设计等。
第四部分是人机交互评估,这是保证系统设计质量的关键环节。
本部分详细介绍了各种评估方法,如实验室评估、使用情境评估、用户调查等。
通过这些方法的应用,设计人员可以评估和改进自己的设计,提供更好的用户体验。
最后一部分是关于人机工程学的未来发展方向与展望。
作者对人机工程学的前景进行了展望,并提出了一些新的研究方向。
这对于人机工程学的学习者和从业者来说是一个很好的启示和指导。
《丁玉兰人机工程学第五版》这本书的优点之一是语言简单明了,易于理解。
作者将抽象的概念和理论通过生动的实例进行阐述,使读者更容易理解和掌握。
另外,书中还提供了很多实际应用案例,这对于读者在实践中应用所学知识非常有帮助。
然而,这本书也有一些不足之处。
首先,由于是教材性质的书籍,内容比较繁杂,对于一些只是简单了解人机工程学的读者可能会觉得有些晦涩难懂。
国际机器人专业的名著题目:国际机器人专业的名著引言:近年来,机器人技术取得了巨大的发展和突破,成为了现代科技领域的热点。
国际机器人专业的名著对于相关行业的从业人员、研究者以及爱好者来说具有极大的价值。
本文将一步一步回答有关国际机器人专业的名著,将为对机器人技术感兴趣的读者提供指引和参考。
一、《机器人技术导论》《机器人技术导论》是国际机器人领域的一本重要教材,被广泛应用于机器人工程、自动控制和人工智能等专业的教学和研究领域。
该书由机器人领域的著名学者编写,系统介绍了机器人技术的基本概念、原理、应用以及发展趋势。
阅读该书可以深入了解机器人的基本原理和相关领域的最新进展。
二、《人工智能与机器人》《人工智能与机器人》是一本将人工智能与机器人技术紧密结合、探讨二者相互影响的名著。
该书包括从基本的人工智能算法到机器人控制、感知和学习等方面的内容。
国际上享有盛誉的作者们通过具体的案例和实验,揭示出人工智能与机器人领域的前沿交叉点,并展望了未来的发展方向。
该书对于研究人员、学生和从业人员都是一本难得的综合性参考书。
三、《机器人学导论》《机器人学导论》是机器人学领域的经典教材,由国际著名科学家编写。
该书系统地介绍了机器人的运动学和动力学、传感器和控制系统、路径规划和机器视觉等方面的知识。
通过详尽的理论阐述和实际案例,这本书不仅有助于读者对机器人的建模与控制有一个全面的理解,还能够帮助他们解决实际问题。
《机器人学导论》对于研究机器人控制和导航的专业人士尤为重要。
四、《机器人学原理与实践》《机器人学原理与实践》是机器人学领域的经典著作之一,也是一本系统介绍机器人技术的权威教材。
该书包括机器人的机构和运动学、控制和规划、感知和导航等主题。
不仅如此,该书还提供了许多实际机器人项目的案例研究,从而帮助读者将理论知识应用于实际场景。
《机器人学原理与实践》为读者提供了一个深入学习机器人学科、理解机器人技术和掌握实践技能的平台。
人机工程与设计应用教材以下是一些人机工程与设计应用的教材,供参考:1. "人机工程学导论" - Helander, M. (Introduction to Human Factors and Ergonomics)2. "人类工程学与工程设计" - Wickens, C. D., Hollands, J. G., & Banbury, S. (Engineering Psychology and Human Performance)3. "人因工程与人机系统第四版" - Salvendy, G. (Handbook of Human Factors and Ergonomics)4. "人机交互:认知工程与人机界面设计" - Preece, J., Rogers, Y., & Sharp, H. (Interaction Design: Beyond Human-Computer Interaction)5. "人机工程学与设计" - Sanders, M. S., & McCormick,E. J. (Human Factors in Engineering and Design)6. "人因工效学" - Carayon, P. (Handbook of Human Factors in Health Care and Patient Safety)7. "人机交互:工程与设计方法" - Norman, D. A., & Draper, S. W. (User Centered System Design: New Perspectives on Human-Computer Interaction)以上教材涵盖了人机工程与设计的不同领域和应用,包括人机交互、人类工效学、人机界面设计、认知工程等。
国际机器人专业的名著【最新版】目录1.引言:介绍国际机器人专业的名著2.《机器人学:模型、规划与控制》3.《机器人技术及其应用》4.《机器人导论》5.《机器人操作系统》6.结论:总结这些名著对机器人专业的重要性正文随着科技的发展,机器人技术在国际上越来越受到重视。
许多高校和研究机构都开设了机器人专业,以培养相关领域的人才。
在这个专业领域,有一些经典的名著,对于学习和研究机器人技术具有重要的指导意义。
本文将对这些名著进行简要介绍。
首先,我们来了解一本被誉为机器人学“圣经”的书籍——《机器人学:模型、规划与控制》。
这本书是由美国著名机器人学家 John J.Craig 所著,自 1989 年出版以来,已经成为机器人学领域的经典教材。
它系统地介绍了机器人学的基本概念、数学模型、运动规划与控制等方面的内容,对于初学者来说,是一本难得的入门书籍。
接下来是《机器人技术及其应用》,这本书由日本机器人专家菅野重树所著,详细介绍了机器人技术的各个方面,如机械结构、驱动系统、传感器等,并结合实际应用案例,深入浅出地讲解了机器人技术的实现与应用。
此书对于那些希望了解机器人技术在实际工作中的应用的读者来说,具有很高的参考价值。
另一本值得推荐的名著是《机器人导论》,作者是美国机器人学家John H.Holler。
本书全面介绍了机器人技术的发展历程、基本原理、关键技术及应用领域等内容,同时,还提供了大量的实例和图片,以便读者更好地理解和掌握机器人技术。
此书适合那些对机器人技术有兴趣的读者,以及希望系统学习机器人专业的学生。
此外,《机器人操作系统》也是一本值得关注的名著。
该书由芬兰赫尔辛基大学教授 Mikko S.P.Martikainen 所著,主要介绍了机器人操作系统的基本原理、关键技术和应用实例。
它不仅涵盖了传统的机器人操作系统,还讨论了近年来兴起的机器人软件框架,为读者提供了一个全面的了解机器人操作系统的视角。
总之,这些国际机器人专业的名著对于学习和研究机器人技术具有重要的指导意义。