空间几何问题的降维策略
- 格式:doc
- 大小:10.50 KB
- 文档页数:1

空间维数的变化原理的应用空间维数的变化原理是指当行向量组的极大无关组的元素个数不足以把坐标空间中的每个向量都表示出来时,向量组所在的坐标空间的维数就小于向量的自由元个数。
这个原理在实际应用中有很多方面的应用,以下将介绍其中几个方面的具体应用。
1.数据降维在数据分析领域,高维数据的分析常常受到维数灾难的困扰,即高维数据会带来大量的冗余和噪声,导致分析效果较差。
为了解决这个问题,可以利用空间维数的变化原理进行数据降维。
通过找出高维空间中最具代表性的一组基向量,将数据投射到低维空间中,从而减小数据的维数。
常用的降维方法有主成分分析(PCA)和线性判别分析(LDA)等。
2.图像压缩图像压缩是一种减小图像文件大小的技术,可以将图像数据编码为更小的尺寸,以节省存储和传输空间。
在图像压缩中,可以利用空间维数的变化原理来实现数据压缩。
通过将图像从高维的表示空间转换为低维的表示空间,用较少的存储空间来表示图像信息。
常用的图像压缩方法有离散余弦变换(DCT)和小波变换等。
3.3D模型压缩在计算机图形学中,3D模型是用来表示物体外形和结构的三维几何数据。
由于3D模型数据通常具有高维的结构,因此可以利用空间维数的变化原理来进行模型压缩。
通过找到3D模型中最主要的几何特征,可以将3D模型从高维空间压缩到低维空间,从而减小存储和计算开销,并提高模型的传输效率。
4.降低深度学习模型复杂度深度学习模型在处理大规模数据时往往需要较大的参数空间,导致模型复杂度高,训练和推理时间长。
为了减小深度学习模型的复杂度,可以利用空间维数的变化原理来减小模型参数空间。
通过降低模型的维数,减少参数的个数,可以实现对模型复杂度的降低,从而提升模型的训练和推理效率。
5.压缩传感器数据在传感器网络中,传感器节点通常会收集到大量的数据,如温度、湿度、压力等。
为了减小数据的传输量和存储空间,可以利用空间维数的变化原理来压缩传感器数据。
通过找到数据中的局部相关性和冗余性,可以将数据从高维的表示空间压缩到低维的表示空间,从而减小数据的维数,达到数据压缩的效果。

十三、降维法方法简介降维法是将一个三维图变成几个二维图,即应选两个合适的平面去观察,当遇到一个空间受力问题时,将物体受到的力分解到两个不同平面上再求解。
由于三维问题不好想像,选取适当的角度,可用降维法求解。
降维的优点是把不易观察的空间物理量的关系在二维图中表示出来,使我们很容易找到各物理量之间的关系,从而正确解决问题。
赛题精讲例1:如图13—1所示,倾角θ=30°的粗糙斜面上放一物体,物体重为G ,静止在斜面上。
现用与斜面底边平行的力F=G/2推该物体,物体恰好在斜面内做匀速直线运动,则物体与斜面间的动摩擦因数μ等于多少?物体匀速运动的方向如何?解析:物体在重力、推力、斜面给的支持力和摩擦力四个力的作用下做匀速直线运动,所以受力平衡。
但这四个力不在同一平面内,不容易看出它们之间的关系。
我们把这些力分解在两个平面内,就可以将空间问题变为平面问题,使问题得到解决。
将重力沿斜面、垂直于斜面分解。
我们从上面、侧面观察,图13—1—甲、图13—1—乙所示。
如图13—1—甲所示,推力F 与重力沿斜面的分力G 1的合力F ′为:G G F F 22212=+=' F ′的方向沿斜面向下与推力成α角, 则 ︒=∴==451tan 1ααFG这就是物体做匀速运动的方向物体受到的滑动摩擦力与F ′平衡,即 2/2G F f ='=所以摩擦因数:3630cos 2/2=︒==G G F f N μ 例2:如图13—2所示,一个直径为D 的圆柱体,其侧面刻有螺距为h 的光滑的螺旋形凹槽,槽内有一小球,为使小球能自由下落,必须要以多大的加速度来拉缠在圆柱体侧面的绳子?解析:将圆柱体的侧面等距螺旋形凹槽展开成为平面上的斜槽,如图13—2—甲所示,当圆柱体转一周,相当于沿斜槽下降一个螺距h ,当圆柱转n 周时,外侧面上一共移动的水平距离为22122at n D =π①圆弧槽内小球下降的高度为221gt nh =② 解①、②两式,可得,为使螺旋形槽内小球能自由下落,圆柱体侧面绳子拉动的加速度应为hDga π=例3:如图13—3所示,表面光滑的实心圆球B 的半径R=20cm ,质量M=20kg ,悬线长L=30cm 。

十三、降维法方法简介降维法是将一个三维图变成几个二维图,即应选两个合适的平面去观察,当遇到一个空间受力问题时,将物体受到的力分解到两个不同平面上再求解,由于三维问题不好想像,选取适当的角度,可用降维法求解,降维的优点是把不易观察的空间物理量的关系在二维图中表示出来,使我们很容易找到各物理量之间的关系,从而正确解决问题,赛题精讲例1:如图13—1所示,倾角θ=30°的粗糙斜面上放 一物体,物体重为G,静止在斜面上,现用与斜面底边平 行的力F=G/2推该物体,物体恰好在斜面内做匀速直线运 动,则物体与斜面间的动摩擦因数μ等于多少?物体匀速 运动的方向如何?解析:物体在重力、推力、斜面给的支持力和摩擦力 四个力的作用下做匀速直线运动,所以受力平衡,但这四 个力不在同一平面内,不容易看出它们之间的关系,我们 把这些力分解在两个平面内,就可以将空间问题变为平面 问题,使问题得到解决,将重力沿斜面、垂直于斜面分解,我们从上面、侧面 观察,图13—1—甲、图13—1—乙所示,如图13—1—甲所示,推力F 与重力沿斜面的分力G 1的合力F ′为:G G F F 22212=+=' F ′的方向沿斜面向下与推力成α角, 则 ︒=∴==451tan 1ααFG这就是物体做匀速运动的方向物体受到的滑动摩擦力与F ′平衡,即 2/2G F f ='=所以摩擦因数:3630cos 2/2=︒==G G F f N μ 例2:如图13—2所示,一个直径为D 的圆柱体,其侧面刻有螺距为h 的光滑的螺旋形凹槽,槽内有一小球,为使小球能自由下落,必须要以多大的加速度来拉缠在圆柱体侧面的绳子?解析:将圆柱体的侧面等距螺旋形凹槽展开成为平面上的斜槽,如图13—2—甲所示,当圆柱体转一周,相当于沿斜槽下降一个螺距h,当圆柱转n 周时,外侧面上一共移动的水平距离为22122at n D =π① 圆弧槽内小球下降的高度为221gt nh =② 解①、②两式,可得,为使螺旋形槽内小球能自由下落,圆柱体侧面绳子拉动的加速度应为hDga π=例3:如图13—3所示,表面光滑的实心圆球B 的半径 R=20cm,质量M=20kg,悬线长L=30cm ,正方形物块A 的 厚度△h=10cm,质量m=2kg,物体A 与墙之间的动摩擦因 数μ=0.2,取g=10m/s 2,求:(1)墙对物块A 的摩擦力为多大?(2)如果要物体A 上施加一个与墙平行的外力,使物体A 在未脱离圆球前贴着墙沿水平方向做加速度a =5m/s 2 匀加速直线运动,那么这个外力大小方向如何?解析:这里物体A 、B 所受的力也不在一个平面内,混起来考虑比较复杂,可以在垂直于墙的竖直平面内分析A 、B 间压力和A 对墙的压力;在与墙面平行的平面内分析A 物体沿墙水平运动时的受力情况,(1)通过受力分析可知墙对物块A 的静摩擦力大小等于物块A 的重力,(2)由于物体A 贴着墙沿水平方向做匀加速直线运动,所以摩擦力沿水平方向,合力也沿水平方向且与摩擦力方向相反,又因为物体受竖直向下的重力,所以推力F 方向应斜向上,设物体A 对墙的压力为N,则沿垂直于墙的方向,物体B 受到物体A 的支持力大小也为N,有θμtan ,Mg N N f ==而又因为43tan 53sin ==++∆=θθ所以R L R h 在与墙面平行的平面内,对物体A 沿竖直方向 做受力分析,如图13—3—甲所示有mg F =αsin沿水平方向做受力分析,有 ma f F =-αcos 由以上各式,解得 )5/5arcsin(,520)()(22==++=a N ma f mg F因此,对物体A 施加的外力F 的大小为205N,方向沿墙面斜向上且与物体A 水平运动方向的夹角为).5/5arcsin(例4:一质量m=20kg 的钢件,架在两根完全相同的平 行长直圆柱上,如图13—4所示,钢件的重心与两柱等距, 两柱的轴线在同一水平面内,圆柱的半径r=0.025m,钢件 与圆柱间的动摩擦因数μ=0.20,两圆柱各绕自己的轴线做 转向相反的转动,角速度./40s rad =ω若沿平行于柱轴的 方向施力推着钢件做速度为s m /050.00=υ的匀速运动, 求推力是多大?(设钢件不发生横向运动)解析:本题关键是搞清滑动摩擦力的方向,滑动摩擦力 的方向与相对运动的方向相反,由于钢件和圆柱都相对地面 在运动,直接不易观察到相对地面在运动,直接不易观察到 相对运动的方向,而且钢件的受力不在同一平面内,所以考 虑“降维”,即选一个合适的角度观察,我们从上往上看,画 出俯视图,如图13—4—甲所示,我们选考虑左边圆柱与钢件之间的摩擦力,先分析相对运动的方向,钢件有向前的速度0υ,左边圆住有向右的速度ωr ,则钢件相对于圆柱的速度是0υ与ωr 的矢量差,如图中△v ,即为钢件相对于圆柱的速度,所以滑动摩擦力f 的方向与△v ,的方向相反,如图13—4—甲所示,以钢件为研究对象,在水平面上受到推力F 和两个摩擦力f 的作用,设f 与圆柱轴线的夹角为θ,当推钢件沿圆柱轴线匀速运动时,应有22000)(22cos 2ωθr v v f vv ff F +=∆== ①再从正面看钢件在竖直平面内的受力可以求出F N , 如图13—4—乙所示,钢件受重力G 和两个向上的支 持力F N ,且G=2F N ,所以把N N F f GF μ==,2代入①式,得 推力N r v v mgr v v F F N 2)(22)(222002200=+⋅=+⋅=ωμωμ例5:如图13—5所示,将质量为M 的匀质链条套在一个表面光滑的圆锥上,圆锥顶角为α,设圆锥底面水平,链条静止时也水平,求链条内的张力,解析:要求张力,应在链条上取一段质量元m ∆进行研究,因为该问题是三维问题,各力不在同一平面内,所以用“降维法”作出不同角度的平面图进行研究,作出俯视图13—5—甲,设质量元m ∆两端所受张力为T,其合力为F,因为它所对的圆心角θ很小,所以2sin 2θT F =,即F=T θ,再作出正视图13—5—乙,质量元受重力m ∆g 、支持力N 和张力的合力F 而处于平衡状态,由几何知识可得:2cot 22cotαπθα⋅=⋅∆=Mg mg F 所以链条内的张力2cot 22απ⋅==MgF T例6:杂技演员在圆筒形建筑物内表演飞车走壁,演员骑摩托车从底部开始运动,随着速度增加,圈子越兜越大,最后在竖直圆筒壁上匀速率行驶,如图13—6所示,如果演员和摩托车的总质量为M,直壁半径为R,匀速率行驶的速率为v ,每绕一周上升的距离为h,求摩托车匀速走壁时的向心力,解析:摩托车的运动速度v ,可分解为水平速度v 1和竖直分速度为v 2,则向心力速度为Rv a 21=,处理这个问题的关键是将螺旋线展开为一个斜面,其倾角的余弦为22)2(2cos hR R a +=ππ,如图13—6—甲所示,所以有v hR R v v 221)2(2cos +==ππα向心加速度为:222221))2(2(h R R R v R v a +==ππ向心力 )4(422222h R RMv Ma F +==ππ 例7:A 、B 、C 为三个完全相同的表面光滑的小球,B 、C 两球各被一长为L=2.00m 的不可伸和的轻线悬挂于天花板上,两球刚好接触,以接触点O 为原点作一直角坐标系z Oxyz ,轴竖直向上,O x 与两球的连心线重合,如图13—7所示,今让A 球射向B 、C 两球,并与两球同时发生碰撞,碰撞前,A 球速度方向沿y 轴正方向,速率为s m v A /00.40=,相碰后,A 球沿y 轴负方向反弹,速率A v =0.40m/s ,(1)求B 、C 两球被碰后偏离O 点的最大位移量; (2)讨论长时间内B 、C 两球的运动情况,(忽略空气阻力,取g=10m/s 2) 解析:(1)A 、B 、C 三球在碰撞前、后的运动发生 在Oxy 平面内,设刚碰完后,A 的速度大小为A v ,B 、 C 两球的速度分别为B v 与C v ,在x 方向和y 方向的分速 度的大小分别为Bx v ,Cy Cx By v v v ,和,如图13—7—甲所示, 由动量守恒定律,有0=-Bx Cx mv mv ①A Cy By Ax mv mv mv mv -+= ②由于球面是光滑的,在碰撞过程中,A 球对B 球的作用力方向沿A 、B 两球的连心线,A 球对C 球的作用力方向沿A 、C 两球的连心线,由几何关系,得⎪⎪⎭⎪⎪⎬⎫==6tan 6tan ππCy Cx By Bx v v v v ③ 由对称关系可知 Cy Bx v v = ④解①、②、③、④式可得 s m v v Cy Bx /27.1==s m v v Cy Bx /20.2==由此解得 s m v v Cy Bx /54.2==图13—7甲设C 球在x >0, y>0, z >0的空间中的最大位移为,OQ Q 点的z 坐标为z Q ,则由机械能守恒定律可写出Q C mgz mv =221 ⑤ 所以 gv z CQ 22= 代入数值解得 z Q =0.32m而Q 点到O z 轴的距离为 )2()(22Q Q Q z L z z L L QD -=--=所以C 球离O 点的最大位移量 Q Q Lz OD z OQ 222=+= ⑥代入数值,得 m OQ 13.1= ⑦由对称性,可得B 球在0,0,0>><z y x 的空间的最大位移量OP 为m OQ OP 13.1== ⑧(2)当B 、C 两球各达到最大位移后,便做回到原点的摆动,并发生两球间的碰撞,两球第一次返回O 点碰撞前速度的大小和方向分别为s m v Bx /27.1= 方向沿正x 轴方向 By v =2.20m/s 方向沿y 轴方向s m v Cx /27.1= 方向沿正x 轴方向 Cy v =2.20m/s 方向沿y 轴方向设碰撞后的速度分别为11C B v v 和,对应的分速度的大小分别为x B v 1、y B v 1、x C v 1和y C v 1,由于两球在碰撞过程中的相互作用力只可能沿x 轴方向,故碰撞后,沿y 轴方向的速度大小和方向均保持不变(因为小球都是光滑的),即y B v 1=By v 方向沿负y 轴方向 ⑨ y C v 1=Cy v 方向沿负y 轴方向 ⑩碰撞过程中,沿x 轴方向的动量守恒,则 Cx Bx x B x C mv mv mv mv -=-11 因为Cx Bx v v = 所以x B x C v v 11=即碰撞后两球在x 方向的分速度大小也相等,方向相反,具体数值取决于碰撞过程中是否机械能损失,在A 球与B 、C 两球同时碰撞的过程中,碰撞前,三者的机械能m mv E AD 82121==碰撞后三者的机械能 12222259.6212121E E m mv mv mv E C B A <=++=表明在碰撞过程中有机械能损失,小球的材料不是完全弹性体,故B 、C 两球在碰撞过程中也有机械能损失,即)(21)(21)(212222221111Y X X X Y XB BC C B B v v m v v m v v m +<+++ ○11 由⑨、⑩和○11三式,和 Cx Bx C B v v v v x X =<=11 ○12或C B C B v v v v =<=11当B 、C 两球第二次返回O 点时,两球发生第二次碰撞,设碰撞后两球的速度分别为22C B v v 和,对应的分速度的大小分别为y C x C B B v v v v y X 22,,22和,则有y y y y C B C B v v v v 1122=== y x x x C B C B v v v v 1122=<= 或 12B B v v < 12C C v v <由此可见,B 、C 两球每经过一次碰撞,沿x 方向的分速度都要变小,即x x x x x x X C B C B C B Cx B v v v v v v v v 332211=>=>=>= ……而y 方向的分速度的大小保持不变,即y t y y y y y C B C B C B Cy B v v v v v v v v 332211======= ……当两球反复碰撞足够多次数后,沿x 方向的分速度为零,只有y 方向的分速度,设足够多的次数为n,则有 0==nx nx C B v v ○13 s m v v v y ny ny B C B /20.2=== ○14 即最后,B 、C 两球一起的Oyz 平面内摆动,经过最低点O 的速度由○14式给出,设最高点的z 轴坐标为Qn z ,则 Qn Cny mgz mv =221 得gv z Cny Qn 22=代入数值,得 m z Qn 24.0= ○15 最高点的y 坐标由下式给出:Qn Qn Qn Qn z z L z L L y )2()(22-±=--±=代入数值,得:m y Qn 95.0±= ○16 例8:一半径R=1.00m 的水平光滑圆桌面,圆心为O,有一竖直的立柱固定在桌面上的圆心附近,立柱与桌面的交线是 一条凸的平滑的封闭曲线C,如图13—8所示,一根不可伸 长的柔软的细轻绳,一端固定在封闭曲线上某一点,另一端系一质量为m=7.5×10—2kg 的小物块,将小物块放在桌面上并把绳拉直,再给小物块一个方向与绳垂直、大小为s m v /0.40=的初速度,物块在桌面上运动时,绳将缠绕在立柱上,已知当绳的张力为T 0=2.0N 时,绳即断开,在绳断开前物块始终在桌面上运动,(1)问绳刚要断开时,绳的伸直部分的长度为多少?(2)若绳刚要断开时,桌面圆心O 到绳的伸直部分与封闭曲线的接触点的连线正好与绳的伸直部分垂直,问物块的落地点到桌面圆心O 的水平距离为多少?已知桌面高度H=0.80m,物块在桌面上运动时未与立柱相碰,取重力加速度大小为10m/s 2,解析:(1)这一问题比较简单,绳断开前,绳的张力即为物块所受的向心力,因为初速度与绳垂直,所以绳的张力只改变物块的速度方向,而速度大小不变,绳刚要断开时,绳的伸直部分的长度可求出,设绳的伸直部分长为x ,则由牛顿第二定律得:xv m T 200=代入已知数值得:x =0.60m(2)选取桌面为分析平面,将物块的落地点投影到此分析平面上,然后由平抛运动的知识求解,如图13—8—甲所示,设绳刚要断开时物块位于 桌面上的P 点,并用A 点表示物块离开桌面时的位置, 先取桌面为分析平面,将物块的落地点投影到此分析 平面上,其位置用D 点表示,易知D 点应在直线PA 的延长线上,OD 即等于物块落地点与桌面圆心O 的水平距离,而AD 等于物块离开桌面后做平抛运动的 水平射程,即 gH v AD 20= 故20222)2(g H v x R x OD +-+= 代入已知数值得物块落地点到桌面圆心O 的水平距离 m OD 47.2=例9:如图13—9所示是一种记录地震装置的水平摆,摆球m 固定在边长为L,质量可忽略不计的等边三角形的顶点A 上,它的对边BC 跟竖直线成不大的夹角α,摆球可以绕固定轴图13—8BC 摆动,求摆做微小振动的周期,解析:若m 做微小振动,则其轨迹一定在过A 点,垂直于BC 的平面内的以O 为圆心,OA 为半径的圆弧上,因此我们可以作一个过A 点垂直于BC 的平面M,如图13—9—甲所示,将重力mg 沿M 平面和垂直于M 平面方向分解,则在平面M 内,m 的振动等效于一个只在重力αsin mg g m ='作用下简谐运动,摆长.2360sin L LL =︒='所以周期 αππsin 2322g Lg L T =''=例10:六个相同的电阻(阻值均为R )连成一个电 阻环,六个结点依次为1、2、3、4、5和6,如图13—10 所示,现有五个完全相同的这样的电阻环,分别称为D 1、 D 2、…、D 5,现将D 1的1、3、5三点分别与D 2的2、4、 6三点用导线连接,如图13—10—甲所示,然后将D 2的 1、3、5三点分别与D 3的2、4、6三点用导线连接……依次类推,最后将D 5的1、3、5三点分别连接到D 4的2、4、6三点上,证明:全部接好后,在D 1上的1、3、两点间的等效是电阻为R 627724, 解析:由于连接电阻R 的导线,连接环D 之间的导线均不计电阻,因此,可改变环的半径,使五个环的大小满足:D 1<D 2<…<D 5.将图13—10—甲所示的圆柱形网络变成圆台形网络,在沿与底面垂直的方向将此圆台形网络压缩成一个平面,如图13—10—乙所示的平面电路图,现将圆形电阻环变成三角形,1、3、5三点为三角形的顶点,2、4、6三点为三角形三边的中点,图13—10—乙又变为如图13—10—丙所示电路图,不难发现,图13—10—丙所示的电路相对虚直线3、6具有左右对称性,可以用多种解法求,如将电路等效为图13—10—丁, A 1B 1以内的电阻R R B A 5411=A 2B 2以内的电阻R R R R R R R R B A B A B A 1914)2()2(111122=+++=A 3B 3以内的电阻R R R R R R R R B A B A B A 7152)2()2(222233=++⋅+=A 4B 4以内的电阻R R R R R R R R B A B A B A 265194)2()2(333344=++⋅+=A 5B 5以内的电阻R RR R R R R R B A B A B A 627724)2()2(444455=++⋅+=即为D 1环上1、3两点间的等效电阻,例11:如图13—11所示,用12根阻值均为r 的相同的电阻丝构成正立方体框架,试求AG 两点间的等效电阻,解析:该电路是立体电路,我们可以将该立体电路“压扁”,使其变成平面电路,如图13—11—甲所示,考虑到D 、E 、B 三点等势,C 、F 、H 三点等势,则电路图可等效为如图13—11—乙所示的电路图,所以AG 间总电阻为 r r r r R 65363=++=例12:如图13—12所示,倾角为θ的斜面上放一木 制圆制,其质量m=0.2kg,半径为r,长度L=0.1m,圆柱 上顺着轴线OO ′绕有N=10匝的线圈,线圈平面与斜面 平行,斜面处于竖直向上的匀强磁场中,磁感应强度 B=0.5T,当通入多大电流时,圆柱才不致往下滚动?解析:要准确地表达各物理量之间的关系,最好画出正视图,问题就比较容易求解了,如图13—12—甲所示,磁场力F m 对线圈的力矩为M B =NBIL ·2r ·sin θ,重力对D 点的力矩为:M G =mgsin θ,平衡时有:M B =M G 则可解得:A NBL mg I 96.12== 例13:空间由电阻丝组成的无穷网络如图13—13所示,每段电阻丝的电阻均为r,试求A 、B 间的等效电阻R AB ,解析:设想电流A 点流入,从B 点流出,由对称性可知,网络中背面那一根无限长电阻丝中各点等电势,故可撤去这根电阻丝,而把空间网络等效为图13—13—甲所示的电路,(1)其中竖直线电阻r ′分别为两个r 串联和一个r 并联后的电阻值,所以 r r r r r 3232=⋅=' 横线每根电阻仍为r,此时将立体网络变成平面网络,(2)由于此网络具有左右对称性,所以以AB 为轴对折,此时网络变为如图13—13—乙所示的网络,其中横线每根电阻为21r r =竖线每根电阻为32r r r ='='' AB 对应那根的电阻为r r 32=' 此时由左右无限大变为右边无限大, (3)设第二个网络的结点为CD,此后均有相同的网络,去掉AB 时电路为图13—13—丙所示,再设R CD =R n -1(不包含CD 所对应的竖线电阻)则N B A R R =',网络如图13—13—丁所示,此时 1111111333222------++=+⋅+⋅=+''''+=n n n n n n n R r rR r R r R r r R r R r r R当∞→n 时,R n =R n -1 ∴ 上式变为n n n n n R r rR r R r rR r R 3432++=++=由此解得:r r R n 6213+= 即r r R B A 6213+=' 补上AB 竖线对应的电阻r 32,网络变为如图13—13—戊所示的电路, r r r r r r R r R r R B A B A AB 21212)321(21)213(221321)213(262133262133232322=++=++=+++⋅=+⋅='' 例14:设在地面上方的真空室内,存在匀强电场和匀强磁场,已知电场强度和磁感应强度的方向是相同的,电场强度的大小E=4.0V/m,磁感应强度的大小B=0.15T,今有一个带负电的质点以v =20m/s 的速度在此区域内沿垂直场强方向做匀速直线运动,求此带电质点的电量与质量之比q/m 以及磁场的所有可能方向(角度可用反三角函数表),解析:因为带负电的质点做匀速直线运动,说明此质点所受的合外力为零,又因为电场强度和磁感应强度的方向相同,所以该带电质点所受的电场力和洛仑兹力的方向垂直共面,且必受重力作用,否则所受合外力不可能为零,设质点速度方向垂直纸面向里,由此该带电质点的受力图如图13—14所示,由平衡条件有有水平方向:θθsin cos Bqv Eq = ①在竖直方向:mg Bqv Eq =+θθcos sin ②解得:34tan =θ 34arctan =θ q/m=2 同理,当质点速度方向垂直纸面向外时受力情况如图13—14—甲,由平衡条件可解出θ值与上式解出的一样,只是与纸平面的夹角不同,故此带电质点的电量与质量之比为2,磁场的所有可能方向与水平方向的夹角都是 34tan 34arctan ==θθ或针对训练1.如图13—15所示,一个重1000N的物体放在倾角为30°的斜面上,物体与斜面间的摩擦系数μ为1/3,今有一个与斜面最大倾斜线成30°角的力F作用于物体上,使物体在斜面上保持静止,求力F的大小,2.斜面倾角θ=37°,斜面长为0.8m,宽为0.6m,如图13—16所示,质量为2kg的木块与斜面间的动摩擦因数为μ=0.5,在平行于斜面方向的恒力F的作用下,沿斜面对角线从A 点运动到B点(g=10m/s2,sin37°=0.6),求:(1)力F的最小值是多大?(2)力F取最小值时木块的加速度,3.质量为0.8kg的长方形木块静止在倾角为30°的斜面上,若用平行于斜面沿水平方向大小等于3N的力推物体,它仍保持静止,如图13—17所示,则木块所受摩擦力大小为,方向为,4.如图13—18,四面体框架由电阻同为R的6个电阻连接而成,试求任意两个顶点AB间的等效电阻,5.如图13—19所示三棱柱由电阻同为R的电阻线连接而成,试求AB两个顶点间的等效电阻,6.将同种材料粗细均匀的电阻丝连接成立方体的形状,如图13—20所示,每段电阻丝电阻均为r,试求:(1)AB两点间等效电阻R AG;(2)AD两点间等效电阻R AD,。

几种降维思想方法总结降维(Dimensionality Reduction)是机器学习与数据挖掘领域非常重要的一个技术,其主要目的是剔除无关信息,提取数据的本质特征,并将高维数据映射到低维空间进行处理。
降维方法主要有两大类:特征选择和特征提取。
在本文中,我们将总结几种常见的降维方法思想。
1. 主成分分析(Principal Component Analysis,PCA)PCA是一种最常见的降维方法,其思想是将原始特征通过线性变换,得到一组新的互不相关的特征,这些新特征被称为主成分。
主成分的选择是根据方差来确定,保留方差多的特征,可以更好地保留数据的信息。
通过选择合适的主成分数目,我们可以将原本具有很高维度的数据映射到一个低维的空间中,从而达到降维的目的。
2. 因子分析(Factor Analysis)因子分析是另一种常用的降维方法,它假设观测数据是由一组潜在的因子(Latent Variables)决定的。
通过寻找这些潜在因子,我们可以在保留数据信息的前提下,将原始特征的维度降低。
因子分析可以用于探索数据之间的潜在关系,还可以用于处理带有缺失值的数据,通过估计缺失值进行降维。
3. 独立成分分析(Independent Component Analysis,ICA)ICA是一种基于统计独立性的降维方法,它假设观测数据是由相互独立的成分组成的。
与PCA不同,ICA并不追求数据的方差最大化,而是追求数据之间的独立性。
ICA可以将观测数据分解为多个互不相关的独立成分,从而实现数据的降维。
4. 线性判别分析(Linear Discriminant Analysis,LDA)LDA是一种用于分类问题的降维方法,它通过将原始数据投影到低维空间中,从而最大限度地保留数据的类别信息。
LDA寻找一个最佳投影方向,使得同一类别的数据尽可能接近,不同类别的数据尽可能分开。
通过LDA降维,可以在不降低分类性能的情况下,减少数据的维度。

数学物理中的降维算法研究随着科技的迅速发展,各个领域都在不断涌现出大量的数据,这些数据不仅数量庞大,而且维度高,导致很多场景下的数据处理和分析变得非常困难。
降维算法便应运而生,成为了解决高维数据处理难题的一种重要方式。
数学物理中的降维算法,作为降维算法中的重要一部分,正在被广泛研究和应用。
一、降维算法的基本知识1. 降维算法的思想降维算法是一种将高维数据映射到低维空间的算法,具体而言就是将高维数据集转化为低维数据集,以此来简化处理和分析的难度。
其思想基于数据的预处理和特征提取,旨在减少数据冗余,最大程度地保留数据的特征,从而使数据在低维空间中表现出良好的性质和结构。
2. 降维算法的分类根据降维算法的处理对象不同,可以将其分为两类,即线性降维和非线性降维。
其中线性降维包括PCA(主成分分析)和LDA (线性判别分析)等方法,它们可以通过一系列的线性转换将高维数据映射到低维空间。
而非线性降维则使用一些非线性映射方法,如Isomap、LLE(局部线性嵌入)等,它们可以更好地处理高度非线性的数据集。
二、数学物理中的降维算法1. 张量分解张量分解是一种将高维数据张量分解成若干低维张量的方法。
在物理学中,张量分解被用于分析矩阵物理、量子力学中的张量等领域。
张量分解可以处理多个变量之间的关系,而且可以在提取特征的同时保留数据的原始形态,因此在实际应用中有着广泛的应用。
2. 流形学习流形学习是一种非线性降维算法,它基于流形学说,旨在发现数据在低维空间中的潜在流形结构。
流形结构指的是数据在高维空间中的低维规律和分布,通过流形学习可以在保留数据结构和信息的前提下,对高维数据集进行降维。
流形学习可以分为局部流形学习和全局流形学习两种,局部流形学习包括LLE、LE(局部线性嵌入)、LTSA(局部切空间对准)等方法,全局流形学习包括Isomap、Laplace特征映射等。
3. 独立成分分析独立成分分析是一种多元统计学的方法,用于对多元信号的源信号进行分离。
关于降维的理解
降维是指将一个高维空间中的复杂数据集压缩到低维空间中,以便于处理和分析。
降维可以减小数据集的大小,从而加速计算和分析,并且可以更好地可视化数据。
降维通常涉及以下步骤:
1. 数据预处理:对数据进行清洗、特征提取和数据转换等操作,以便于在低维空间中表示数据。
2. 确定降维阈值:通常选择一个适当的降维阈值,将数据集压缩到较低维的空间中。
3. 降维:通过线性变换、离散余弦变换等技术,将高维数据映射到低维空间中。
4. 特征缩放:如果低维空间中存在冗余特征,需要进行特征缩放,以确保低维空间中的特征表示尽可能准确。
降维可以应用于多个领域,如计算机视觉、自然语言处理、推荐系统等。
降维技术在数据挖掘、机器学习和深度学习中发挥着重要的作用。
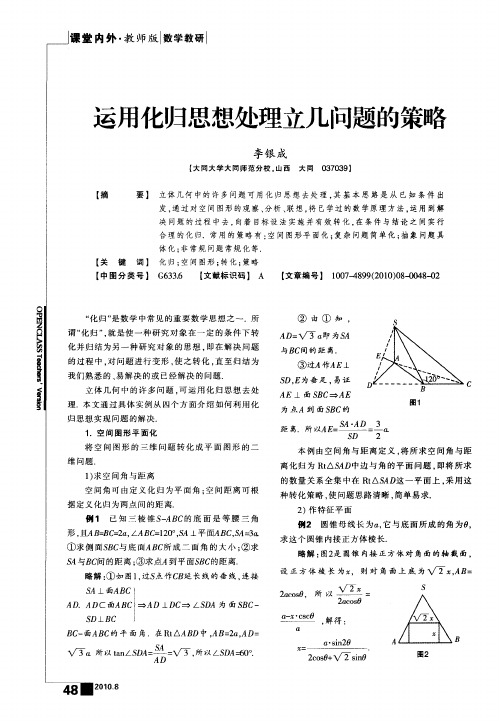
ʏ陈 婷立体几何中的轨迹问题,是立体几何与解析几何的知识交汇点㊂这类问题,立意新颖,重视不同知识的交叉与渗透,重视对数学知识与数学能力的考查与应用,是培养同学们数学核心素养的好素材㊂一㊁直接法直接法就是直接利用立体几何的相关知识,合理分析和研究问题中各个元素之间的关系,或者直接利用轨迹定义进行求解的方法㊂例1 如图1,在正方体A B C D -A 1B 1C 1D 1中,P 是侧面B C C 1B 1上的一个动点,若点P 到直线B C 与直线C 1D 1的距离相等,则动点P 的轨迹是下列哪种线的一部分( )㊂图1A.直线 B .圆C .双曲线 D .抛物线分析:根据题设条件,利用空间点线面的位置关系,直接得到动点P 到直线B C 与到点C 1的距离相等,再结合解析几何中抛物线的定义,可得对应的答案㊂解:根据正方体的性质,可知C 1D 1ʅ平面B C C 1B 1,所以动点P 到直线C 1D 1的距离与到点C 1的距离相等㊂又动点P 到直线B C 与到直线C 1D 1的距离相等,所以动点P 到直线B C 与到点C 1的距离相等㊂根据抛物线的定义,可得动点P 的轨迹是一条抛物线的一部分㊂应选D ㊂二㊁转化法转化法就是将立体几何问题转化为平面几何问题,进行合理 降维 处理,进而应用平面几何㊁解析几何等相关知识来分析与求解的方法㊂例2 (2022年高考北京卷)已知正三棱锥P -A B C 的六条棱长均为6,S 是әA B C 及其内部的点构成的集合㊂设集合T ={Q ɪS |P Q ɤ5},则T 表示的区域的面积为( )㊂A .3π4B .πC .2πD .3π分析:根据题设条件,结合正三棱锥的性质,合理构建点P 在底面әA B C 内的射影点O ,结合集合的创新设置进行合理转化,将空间中的距离问题转化为平面上的距离问题加以分析与求解㊂解:设点P 在底面әA B C 内的射影为点O ㊂依题意知әA B C 是边长为6的正三角形,所以A O =B O =C O =23㊂因为P A =P B =P C =6,所以P O =62-(23)2=26㊂若P Q =5,则O Q =P Q 2-P O 2=1,可知动点Q 的轨迹是在底面әA B C 内,以O 为圆心,半径为r =1的圆及其内部,其对应的面积为πr 2=π㊂应选B ㊂三㊁解析法解析法就是利用解析几何在研究轨迹方面的一整套比较完整的理论体系,通过坐标法进行代数运算与逻辑推理的一种求轨迹的方法㊂解析法是解决立体几何图形的二维轨迹问题的常用方法之一㊂例3 (多选题)如图2所示,在正方体A B C D -A 1B 1C 1D 1中,E 是C C 1的中点,点P 在底面A B C D 内运动,若P D 1,P E 与底面A B C D 所成的角相等,则动点P 的轨迹是( )㊂71知识结构与拓展高一数学 2023年4月Copyright ©博看网. All Rights Reserved.图2A.圆的一部分B.椭圆的一部分C.经过线段B C靠近B的三等分点D.经过线段C D靠近C的三等分点分析:根据题意得D P=2P C,以点D为坐标原点,建立平面直角坐标系,通过坐标法进行讨论求解㊂解:由正方体的性质得D D1ʅ平面A B C D,E Cʅ平面A B C D,所以øD P D1,øC P E分别为P D1,P E与底面A B C D所成的角,所以øD P D1=øC P E㊂因为t a nøD P D1=D D1D P,t a nøC P E= C EP C,又D D1=2C E,所以D P=2P C㊂在平面A B C D中,以D为坐标原点,建立平面直角坐标系,如图3所示㊂图3设正方体的边长为a,点P(x,y),xȡ0,yȡ0,则点D(0,0),C(a,0),所以D P2= x2+y2,P C2=(x-a)2+y2,所以x2+y2= 4(x-a)2+4y2,整理得3x2+3y2-8a x+ 4a2=0,显然3x2+3y2-8a x+4a2=0表示圆的方程,所以动点P的轨迹是圆的一部分,A正确,B错误㊂线段B C靠近B的三等分点的坐标为a,23a,线段C D靠近C的三等分点的坐标为23a,0,分别代入方程3x2+3y2-8a x+4a2=0,可得3a2+3ˑ23a2-8a2+4a2=13a2ʂ0,3ˑ23a2+ 3ˑ02-8aˑ23a+4a2=0,所以23a,0在圆3x2+3y2-8a x+4a2=0上,a,23a不在圆3x2+3y2-8a x+4a2=0上,C错误,D 正确㊂应选A D㊂四㊁性质法性质法就是利用轨迹的相关知识来解决立体几何中轨迹问题的一种基本方法㊂有些空间图形的轨迹不一定是二维的,转化为平面问题比较困难,这时可借助性质法来处理㊂例4已知棱长为3的正方体A B C D-A1B1C1D1中,长为2的线段M N的一个端点M在D D1上运动,另一个端点N在底面A B-C D上运动,则线段M N的中点P的轨迹与正方体的面所围成的几何体的体积为㊂分析:不论әMD N如何变化,点P到点D的距离始终等于1㊂从而点P的轨迹是一个以点D为球心,半径为1的球的18,由此可求出体积㊂解:如图4所示,端点N在正方形A B C D内运动㊂图4因为әMD N为直角三角形,P为斜边MN的中点,所以不论әMD N如何变化,点P到点D的距离始终等于1㊂利用立体几何的性质,可知动点P的轨迹是一个以点D为球心,半径为1的球的18,所以所求体积V= 18ˑ43ˑπˑ13=π6㊂作者单位:江苏省海安高级中学(责任编辑郭正华)8 1知识结构与拓展高一数学2023年4月Copyright©博看网. All Rights Reserved.。
鸚 ^^fiVAMVM7降維突破隹难点,升後发展宝间观念—《正方体的表面展开图》教学实践与思考□江苏省无锡市杨市中心小学徐磊【摘要】本文以《正方体的表面展开图》教学为例,论述帮助学生突破学习几何知识难点、发展空间思维的方法,建议教师通过“体一面一体”的有效转化,用“降维”的方式让三维立体图“躺”下来,初步建立面体之间的联系,再“升维”将二维平面图“立”起来进一步认识,从而勾连学生对二维平面图和三维立体图之间的联系,发展学生的空间观念。
【关键词】小学数学几何思维空间观念【中图分类号】G【文献标识码】A【文章编号】0450-9889 (2020 )45-0108-03小学生的几何思维具有具体性和抽象性相结合的特点,受 限于自身抽象思维的发展,他们学习的几何知识更多的是经验 几何,而不是严格的以逻辑推理为公理化的体系。
六年级的学 生初次接触抽象的三维立体图形,缺少具体直观的经验,所以在 认识和理解上往往存在很大的困难。
如何帮助学生突破学习几 何知识的难点,更好地发展空间观念呢?通过教学《正方体的表 面展开图》,笔者有了一些自己的思考与认识。
我们通过认真观察可以发现,把立体图形的表面展开后会 有以下变化:原来存在于三维空间的6个正方形被置放到了同 一平面上。
原来在立体图上最多只能同时看到3个面,而在表 面展开图上能看到正方体的6个面,把抽象化为直观,能使正方 体的特征表象更清晰,也便于学生解决一些问题。
然而,这也给 学生的认知带来一些困难,如学生原本能直观感受到在正方体 上3组相对面的位置关系,而表面展开图会因为展开的方式不 同而发生变化,学生需要凭借折回的过程进行思考,这就要求学 生具备一定的空间想象能力,增加了认知的难度。
在教学中,教师该如何帮助学生体会表面展开的价值,突破 认知困难,发展空间观念呢?笔者认为应从“有效”人手,做细转 化的过程,通过观察、操作、想象等手段丰富表象,发展学生的空 间观念。