锁相技术复习重点汇总
- 格式:doc
- 大小:2.77 MB
- 文档页数:23
锁相技术知识点总结一、锁相放大器的原理锁相放大器是锁相技术的核心设备,其原理是利用相位敏感检测器(PSD)和低通滤波器实现对输入信号的相位测量和提取。
相位敏感检测器是将输入信号和参考信号相乘,然后通过低通滤波器滤除高频信号,得到一个与输入信号相位有关的直流信号。
通过对这个直流信号进行放大和数字化处理,就可以得到输入信号的相位信息。
锁相放大器的原理可以简单地用一个比喻来理解,就是通过将输入信号和参考信号进行“比对”,得到两者之间的相位差,然后通过放大和数字化处理来得到相位信息。
二、锁相放大器的工作原理锁相放大器的工作原理可以分为两个步骤:信号相位的检测和信号的放大和数字化处理。
在信号相位的检测步骤中,输入信号和参考信号经过相位敏感检测器进行相乘,并通过低通滤波器滤除高频信号,得到一个与输入信号相位有关的直流信号。
在信号的放大和数字化处理步骤中,直流信号经过放大器进行放大,然后经过模数转换器进行数字化处理,得到输入信号的相位信息。
整个过程中,锁相放大器可以通过调节参考信号的相位、频率和幅度来对输入信号进行精确的测量和控制。
三、锁相放大器的应用锁相放大器广泛应用于科学研究、通信、医学、生物化学、工业控制等领域。
在科学研究领域,锁相放大器常用于对微弱信号的测量和分析;在通信领域,锁相放大器常用于对调制信号的检测和解调;在医学领域,锁相放大器常用于生物信号的测量和分析;在生物化学领域,锁相放大器常用于对生物信号的检测和分析;在工业控制领域,锁相放大器常用于对工艺参数的测量和控制。
锁相放大器通过提高信噪比和测量精度,可以满足不同领域对信号测量和控制的需求。
四、锁相放大器的发展趋势随着科学技术的发展,锁相放大器的性能不断提高,应用领域不断拓展。
锁相放大器的发展趋势主要包括以下几个方面:一是性能的提高,包括测量精度的提高、频率范围的扩大、动态范围的增加等;二是功能的增强,包括新的信号处理算法、新的控制方式、新的接口标准等;三是应用领域的拓展,包括科学研究、通信、医学、生物化学、工业控制等领域的应用;四是结构的优化,包括体积的缩小、功耗的降低、成本的降低等。
锁相技术(往届部分题目)一、选择题1、为了加大环路的捕获带,应______环路增益或______环路带宽,但提高环路的跟踪性能的要求与之___。
A 、提高、增加、相反B 、提高、增加、相同C 、降低、增加、相反D 、提高、减小、相反2、在二阶锁相环中,在环路滤波器与VCO 之间插入一直流放大器,放大倍数为10,直流放大器使环路参数n ω____,H ω____,p ω______。
A 、减少、增加、增加B 、增加、增加、增加C 、增加、增加、减少D 、减少、减少、增加3、环路对内部VCO 的噪声呈现____-滤波器作用,对外部输入的噪声呈现____-滤波器作用。
A 、带通、低通B 、低通、带通C 、高通、低通D 、低通、高通4、环路的捕获带、同步带和快捕带的关系是:_____A 、H ω>p ω>L ωB 、p ω>L ω>H ωC 、L ω>H ω>p ωD 、p ω>H ω>L ω5、环路锁定时,瞬时频差_____,固有频差______控制频差,相差为_____,控制电压为___.A 、很小的量、等于、0、常数B 、0、大于、很小的量、变量C 、0、小于、很小的量、变量D 、0、等于、很小的量、常数6、相位噪声的时域噪声表示_____,频域表示______,它们的关系是____.A 、方差、功率、拉氏变换B 、功率、方差、傅氏变换C 、方差、功率谱密度、傅氏变换D 、方差、功率谱密度、Z 变换7、在一阶环中,下列哪种情况环路能锁定_______。
A 、环路增益小于固有频差B 、环路增益大于固有频差C、环路增益等于固有频差D、环路增益小于固有频差8、锁相环稳定的条件是:________。
A、理想情况下相位余量为0°,实际情况相位余量60°B、理想情况下相位余量小于0°,实际情况相位余量0°C、理想情况下相位余量为60°,实际情况相位余量0°D、理想情况下相位余量为180°,实际情况相位余量-60°9、当环路的相位裕度接近于0°,在滤波器中增加______来改善环路的稳定性。
锁相技术(往届部分题目)一、选择题1、为了加大环路的捕获带,应______环路增益或______环路带宽,但提高环路的跟踪性能的要求与之___。
A 、提高、增加、相反B 、提高、增加、相同C 、降低、增加、相反D 、提高、减小、相反2、在二阶锁相环中,在环路滤波器与VCO 之间插入一直流放大器,放大倍数为10,直流放大器使环路参数n ω____,H ω____,p ω______。
A 、减少、增加、增加B 、增加、增加、增加C 、增加、增加、减少D 、减少、减少、增加3、环路对内部VCO 的噪声呈现____-滤波器作用,对外部输入的噪声呈现____-滤波器作用。
A 、带通、低通B 、低通、带通C 、高通、低通D 、低通、高通4、环路的捕获带、同步带和快捕带的关系是:_____A 、H ω>p ω>L ωB 、p ω>L ω>H ωC 、L ω>H ω>p ωD 、p ω>H ω>L ω5、环路锁定时,瞬时频差_____,固有频差______控制频差,相差为_____,控制电压为___.A 、很小的量、等于、0、常数B 、0、大于、很小的量、变量C 、0、小于、很小的量、变量D 、0、等于、很小的量、常数6、相位噪声的时域噪声表示_____,频域表示______,它们的关系是____.A 、方差、功率、拉氏变换B 、功率、方差、傅氏变换C 、方差、功率谱密度、傅氏变换D 、方差、功率谱密度、Z 变换7、在一阶环中,下列哪种情况环路能锁定_______。
A 、环路增益小于固有频差B 、环路增益大于固有频差C、环路增益等于固有频差D、环路增益小于固有频差8、锁相环稳定的条件是:________。
A、理想情况下相位余量为0°,实际情况相位余量60°B、理想情况下相位余量小于0°,实际情况相位余量0°C、理想情况下相位余量为60°,实际情况相位余量0°D、理想情况下相位余量为180°,实际情况相位余量-60°9、当环路的相位裕度接近于0°,在滤波器中增加______来改善环路的稳定性。
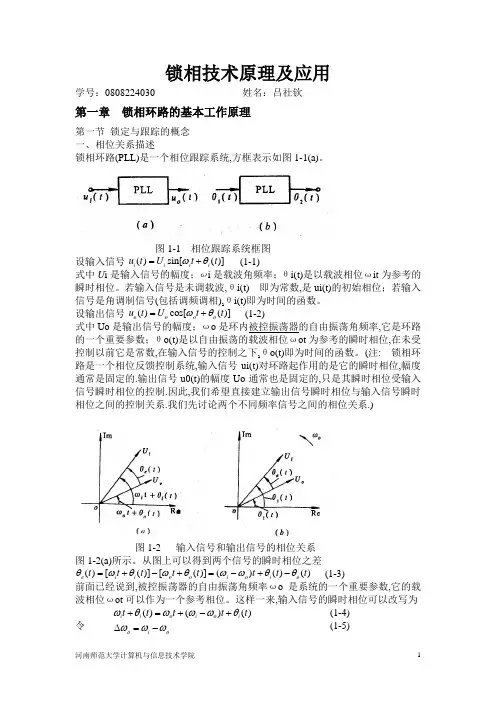
锁相技术原理及应用学号:0808224030姓名:吕社钦第一章 锁相环路的基本工作原理第一节 锁定与跟踪的概念 一、相位关系描述锁相环路(PLL)是一个相位跟踪系统,方框表示如图1-1(a)。
图1-1 相位跟踪系统框图设输入信号 (1-1) 式中U i 是输入信号的幅度;ωi 是载波角频率;θi(t)是以载波相位ωit 为参考的瞬时相位。
若输入信号是未调载波,θi(t) 即为常数,是ui(t)的初始相位;若输入信号是角调制信号(包括调频调相),θi(t)即为时间的函数。
设输出信号 (1-2) 式中Uo 是输出信号的幅度;ωo 是环内被控振荡器的自由振荡角频率,它是环路的一个重要参数;θo(t)是以自由振荡的载波相位ωot 为参考的瞬时相位,在未受控制以前它是常数,在输入信号的控制之下,θo(t)即为时间的函数。
(注: 锁相环路是一个相位反馈控制系统,输入信号ui(t)对环路起作用的是它的瞬时相位,幅度通常是固定的.输出信号u0(t)的幅度Uo 通常也是固定的,只是其瞬时相位受输入信号瞬时相位的控制.因此,我们希望直接建立输出信号瞬时相位与输入信号瞬时相位之间的控制关系.我们先讨论两个不同频率信号之间的相位关系.)图1-2 输入信号和输出信号的相位关系图1-2(a)所示。
从图上可以得到两个信号的瞬时相位之差 (1-3)前面已经说到,被控振荡器的自由振荡角频率ωo 是系统的一个重要参数,它的载波相位ωot 可以作为一个参考相位。
这样一来,输入信号的瞬时相位可以改写为(1-4)令 (1-5)()sin[()]i i i i u t U t t ωθ=+()cos[()]o oo o u t U t t ωθ=+()[()][()]()()()e i i o o i o i o t t t t t t t t θωθωθωωθθ=+-+=-+-()()()i i o i o i o i o t t t t t ωθωωωθωωω+=+-+∆=-为输入信号频率与环路自由振荡频率之差,称为环路的固有频差。
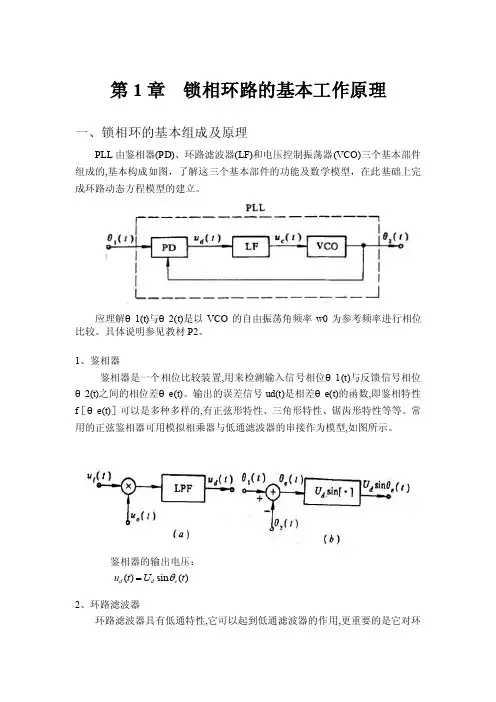
第1章 锁相环路的基本工作原理一、锁相环的基本组成及原理PLL 由鉴相器(PD)、环路滤波器(LF)和电压控制振荡器(VCO)三个基本部件组成的,基本构成如图,了解这三个基本部件的功能及数学模型,在此基础上完成环路动态方程模型的建立。
应理解θ1(t)与θ2(t)是以VCO 的自由振荡角频率w0为参考频率进行相位比较。
具体说明参见教材P2。
1、鉴相器鉴相器是一个相位比较装置,用来检测输入信号相位θ1(t)与反馈信号相位θ2(t)之间的相位差θe(t)。
输出的误差信号ud(t)是相差θe(t)的函数,即鉴相特性f [θe(t)]可以是多种多样的,有正弦形特性、三角形特性、锯齿形特性等等。
常用的正弦鉴相器可用模拟相乘器与低通滤波器的串接作为模型,如图所示。
鉴相器的输出电压:2、环路滤波器环路滤波器具有低通特性,它可以起到低通滤波器的作用,更重要的是它对环()sin ()d d e u t U t θ=路参数(如环路稳定性、环路单边噪声带宽、环路捕获时间等)调整起着决定性的作用。
环路滤波器是一个线性电路,在时域分析中可用一个传输算子F(p)来表示,其中p(≡d /dt)是微分算子;在频域分析中可用传递函数F(s)表示,其中s(a+j Ω)是复频率;若用s=j Ω代入F(s)就得到它的频率响应F(j Ω)。
主要了解RC 积分滤波器、无源比例积分滤波器及有源比例积分滤波器这三类环路滤波器的电路形式及传输函数。
a 、 R C 积分滤波器:式中τ1=RC 是时间常数,这是这种滤波器唯一可调的参数。
滤波器的频率特 性b 、无源比例积分滤波器式中τ1=(R1+R2)C ;τ2=R2C 。
这是两个独立的可调参数,其频率响应为c 、有源比例积分滤波器式中τ1=(R1+AR1+R2)C ;τ2=R2C ;A 是运算放大器无反馈时的电压增益。
若A 很大则有不考虑负号的影响,因为负号表示,鉴相器工作在鉴相器特性曲线斜率为负的那一段。
锁相技术期末总结一、引言锁相技术是一种广泛应用于现代电子技术中的信号处理方法,主要用于提取信号中的相位信息。
它通过对输入信号与本地参考信号进行比较和修正,实现对信号相位的精确测量和调整。
锁相技术的应用领域非常广泛,包括无线通信、激光测距、声纳系统、医学影像等。
在本次课程学习中,我们深入了解了锁相技术的原理、应用和实现方法,并通过实践操作进一步巩固了对锁相技术的理解。
二、锁相技术的原理和基本概念锁相技术的原理是基于反馈控制和频率调制的,通过频率调制输入信号和本地参考信号,实现对信号相位的精确测量和调整。
1. 相位差测量原理通过将输入信号与本地参考信号进行乘法运算,并通过低通滤波器和放大器对乘积信号进行处理,最终得到与相位差成正比的直流电压。
根据这个原理,我们可以通过测量这个直流电压来得到输入信号与参考信号之间的相位差。
2. 锁相循环原理锁相循环是指通过反馈控制将输入信号的相位差调整到指定值的过程。
锁相循环由相位比较器、环路滤波器、VCO(Voltage Controlled Oscillator)和反馈网络等组成。
相位比较器用于比较输入信号的相位差和参考信号的相位差,输出误差信号;环路滤波器用于对误差信号进行滤波;VCO用于将滤波后的误差信号转换成频率信号,并与参考信号进行混频;反馈网络将VCO的输出作为参考信号送回相位比较器,形成一个闭环控制系统。
三、锁相技术的应用锁相技术在各个领域中都有广泛的应用,下面主要介绍其中几个典型的应用。
1. 通信领域锁相技术在通信领域中的应用主要包括载波恢复、时钟恢复和时钟同步。
在接收端,通过锁相环的频率跟踪功能可以自适应地追踪和调整接收信号的频率,从而实现载波恢复。
而由于通信系统中的时钟信号也是通过调制到信号中进行传输的,因此通过锁相循环也可以实现对时钟信号的恢复和同步。
2. 激光测距锁相技术在激光测距领域中被广泛应用。
激光测距的原理是利用激光光束射到目标上并接收反射光,通过测量光传播的时间来计算目标的距离。
名词解释和简答题整理第一章锁相环路的基本工作原理:1.锁相环(PLL)---锁相环是一个能够跟踪输入信号相位的闭环自动控制系统。
2.捕获带:环路能通过捕获过程而进入同步状态所允许的最大固有频差|Δωo|max。
3.同步带:锁相环路能够保持锁定状态所允许的最大固有频差|Δωo|max。
4.快捕带:保证环路只有相位捕获一个过程的最大固有频差值|Δωo|max。
5.输入信号频率与环路自由振荡频率之差,称为环路的固有频率环路固有角频差:输入信号角频率ωi与环路自由振荡角频率ωo之差。
瞬时角频差:输入信号频率ωi与受控压控振荡器的频率ωv之差。
控制角频差:受控压控振荡器的频率ωv与自由振荡频率ωo之差。
三者之间的关系:瞬时频差=固有频差-控制频差。
6.鉴相器是一个相位比较装置,用来检测输入信号相位θ1(t)与反馈信号相位θ2(t)之间的相位差θe(t)。
输出的误差信号u d(t)是相差θe(t)的函数。
7.锁相环路由鉴相器、环路滤波器和压控振荡器三个主要部件构成;其独特的性能有载波跟踪特性、调制跟踪特性和低门限特性。
8.环路滤波器---即低通滤波器,滤除鉴相器输出电压中的高频分量,起平滑滤波的作用,提高环路的稳定性。
9.压控振荡器---压控振荡器是一个电压-频率变换装置,它的振荡频率应随输入控制电压u c(t)线性地变化。
10.环路的动态方程:pθe(t)=pθ1(t)-K o U d F(p)sinθe(t)11.相平面:将瞬时频差与瞬时相差的关系在平面直角坐标系中所做的图。
相点:是相平面上相轨迹上的一个点,表示环路在某一时刻的状态。
12.如果锁相环路的起始状态处于不稳定平衡点时,环路自身没有能力摆脱这种状态,只有依靠外力(噪声或人为扰动)才能使环路偏离这个状态而进行捕获;所以一旦遇到这种情况就可能出现在不稳定平衡状态的滞留,致使捕获过程延长。
这种现象称为锁相环路的延滞现象。
13.环路固有频差Δωo大于环路增益K,锁相环路处于失锁差拍状态,被控振荡器未被输入信号锁定;但是由于锁相环路的控制作用,使锁相环路的平均频率向输入信号频率方向牵引。
第五章集成锁相环锁相技术可广泛用于广播电视、雷达通信、频率合成、信号自动跟踪、自动控制、FM 解调、电机稳速、抑制电网干扰、时钟同步等领域。
本章首先介绍锁相环的基本概念,然后重点阐述CMOS集成锁相环CD4046的工作原理与应用技术。
第一节锁相环简介众所周知,如果广播电台发射的信号频率不稳定,或者超外差式收音机的本级振荡频率不稳定,在收听节目时就很容易发生“跑台”、“串台”现象,严重影响收听效果。
假设收音机具有自动跟踪电台的本领,能根据电台频率的变化随时调整本振频率,确保465kHz的差频不变,则上述问题可迎刃而解。
而这正是锁相环的用途之一。
目前,在现代通信设备、彩色电视机、高档收录机中,广泛采用了锁相技术。
所谓锁相,就是实现相位同步。
能使两个电信号的相位保持同步的闭环系统叫锁相环(PLL)。
锁相环主要包括四部分:相位比较器(PD亦称鉴相器),低通滤波器(LPF);压控振荡器(VCO);负反馈电路(运算器)。
锁相环属于闭环控制系统,其基本构成如图5-1所示。
使用锁相环时一般要在负反馈线路中插入一个运算器:除法器(÷N)、乘法器(×N图5-1 锁相环的基本构成)、加法器(+N)或减法器(-N)。
若令锁相环的输出频率f2分别为N f1、f1/N、f1+N、f1-N,则运算器的输出频率f2'依次对应于f2/N、Nf2、f2-N、f2+N。
压控振荡器的输出信号为U O(t),运算器的输出信号为U'O(t)。
相位比较器一端接输入信号U I(t),另一端接比较信号U'O(t)。
比较器将U I(t)与U'O(t)的相位进行比较,产生一个与二者的相位差△Φ成正比的误差电压UΦ(t)。
UΦ(t)再经过低通滤波器滤除高频分量,得到平均值电压即控制电压U d(t),加到VCO的控制端,使之振荡频率改变,进而使f2'向输入信号频率f1靠拢,二者频率差迅速减小,直至△f=0,f2'=f1。
锁相技术复习要点第1章 锁相环路的基本工作原理一、考核知识点(一)锁相环路的基本工作原理;(二)锁相环路的相位数字模型及其微分方程;(三)锁相环路的基本性能。
二、考核要求(一)锁定与跟踪的概念1、识记:(1)相位的概念;(2)锁相环路的定义;(3)环路的捕获带(4)环路的同步带。
2、领会:(1)锁相环路是一个相位跟踪系统,它建立了输出信号瞬时相位与输入信号瞬时相位的控制关系(2)几个重要参数:载波相位、瞬时相位、自由振荡角频率、瞬时相差、移稳态相差;(3)环路的两种基本工作状态:捕获过程、锁定状态。
3、应用:(1)环路是处于锁定状态的判定依据;(2)一阶环稳态相差的计算。
(二)环路组成1、识记:(1)环路的基本部件;(2)鉴相器的作用与数学模型;(3)鉴相器的分类:模拟乘法器鉴相器、序列电路(数字鉴相器);(4)环路滤波器的作用与数学模型;(5)压控振荡器的作用与数学模型;(6)压控灵敏度;(7)压控振荡器的种类。
2、领会:(1)锁相环路的组成及框图;(2)正弦鉴相器及数学模型;(3)几种常用的环路滤波器及传递函数;(4)锁相环路的相位数学模型。
3、应用;(1)理想积分滤波器分析;(2)非常用环路滤波器的传递函数求解。
(三)环路的动态方程1、 识记:(1)瞬时频差;(2)控制频差;(3)固有频差;(4)环路增益K。
2、 领会:(1)锁相环路动态方程3、应用:(1)锁相环路动态方程的含意;(2)稳态相差的求解。
(四)一阶环路的捕获、锁定与失锁。
1、识记:(1)一阶环路;(2)相点;(3)相轨迹(4)相平面。
2、领会:(1)一阶环路的非线性微分方程;(2)相轨迹上相点的含义。
3、应用:(1)频率牵引现象;(2)一阶环路的捕获带、同步带、快捕带。
第二章 环路跟踪性能一、考核知识点(一)锁相环路的线性相位模型及传递函数;(二)锁相环路的性能指标;(三)二阶环路在典型输入下的响应;(四)环路的频率响应。
第一章锁相环的概念:当其输出信号频率与输入信号频率相同时,输出信号与输入信号之间的相位差同步(相位差为0,或为常数)。
故称为锁相环路。
简称为锁相环 一.锁相环组成基本锁相环的组成:⑴ 鉴相器(Phase Detector )---PD ⑵ 环路滤波器(Loop Filter )---LF⑶ 压控振荡器(Voltage Controlled Oscillator )---VCO()t 1θ为输入量()t u i 的瞬时相位。
()t 2θ为输入量()t u o 的瞬时相位。
各部分分析:1.鉴相器 是一个相位比较器,用于比较()t 1θ与()t 2θ之间的相位差)]()(sin[21)]()(2sin[21)](cos[)](sin[)()(212121t t U U K t t t U U K t t U t t U K t u t u K o i m o o i m o o o i m o i m θθθθωθωθω-+++=++= 再经过低通滤波器(LPF )滤除o ω2成分之后,得到误差电压)]()(sin[21)(21t t U U K t u o i m d θθ-=令 o i m d U U K U 21=为鉴相器的最大输出电压,得到)](sin[)(t U t u e d d θ= 2.环路滤波器及其传输函数环路滤波器是一个线性电路,在时域分析中可用一个传输算子)(p F 来表示,其中)(dt d p ≡是微分算子;在频域分析中可用传递函数)(s F 表示,其中)(Ω+=j s α是复频率;若用Ω=j s 代入就得到它的频率响应)(Ωj F ,故环路滤波器模型可表示为图定义控制电压 ()()()p F t u t u d c =(1)RC 积分滤波器这是结构最简单的低通滤波器, 传输算子:111)(τp p F +=,RC =1τ是时间常数,这是这种滤波器唯一可调的参数。
令p=j Ω,并代入(1-18)式,即可得滤波器的频率特性:111)(τΩ+=Ωj j F低通特性,相位滞后。
当频率很高时,幅度趋于零,相位滞后接近于2π。
(2)无源比例积分滤波器无源比例积分滤波器如图1-9(a)所示,它与RC 积分滤波器相比,附加了一个与电容器串联的电阻R 2,这样就增加了一个可调参数。
传输算子:1211)(ττp p p F ++=C R R )(211+=τ;C R 22=τ是两个独立的可调参数。
频率特性:1211)(ττΩ+Ω+=Ωj j j F据此可作出对数频率特性,如图1-9(b)所示。
这也是一个低通滤波器,与RC 积分滤波器不同的是,当频率很高时211)(R R R j F +=Ω∞→Ω图1-9 无源比例积分滤波器的组成与对数频率特性 (a)组成 (b)频率特性低通特性。
从相频特性上看,当频率很高时有相位超前校正的作用,这是由相位超前因子21τΩ+j 引起的。
这个相位超前作用对改善环路的稳定性是有用的。
(3)有源比例积分滤波器有源比例积分滤波器由运算放大器组成,电路如图它的传输算子:1211)(ττp p Ap F ++-=,C R AR R )(2111++=τ;C R 22=τ;A 是运算放大器无反馈时的电压增益若运算放大器的增益A 很高,则传输算子可以近似为图1-10 有源比例积分滤波器的组成与对数频率特性 (a)组成 (b)频率特性负号对环路的工作没有影响,分析时可以不予考虑。
故传输算子可以近似为121)(ττp p p F +=式中τ1=R 1C 。
(传输算子的分母中只有一个p,是一个积分因子,故高增益的有源比例积分滤波器又称为理想积分滤波器。
显然,A 越大就越接近理想积分滤波器。
此滤波器的频率响应为121)(ττΩΩ+=Ωj j j F 低通特性,比例作用。
相频特性有超前校正。
212121211()11111p F p Ap p A pAR C p A pAR Cp pR Cτττττ+=-++≈-++≈-+=-3.压控振荡器压控振荡器是一个电压-频率变换装置,在环中作为被控振荡器,它的振荡频率应随输入控制电压 )(t u c 线性地变化,即应有变换关系)()(t u K t c o o v +=ωω)(t v ω是压控振荡器的瞬时角频率;o K 为控制灵敏度或称为增益系数,单位是][V s rad ⋅。
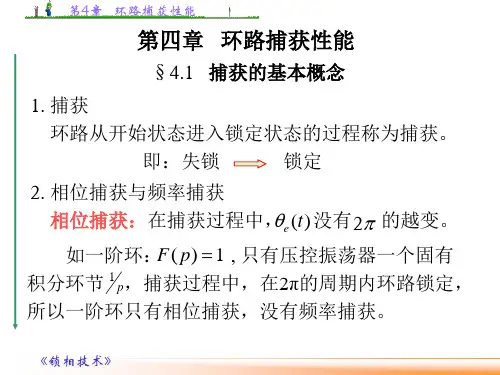
由于压控振荡器的输出反馈到鉴相器上,对鉴相器输出误差电压)(t u d 起作用的不是其频率而是其相位⎰⎰+=tco ot vd u K t d 0)()(ττωττω即 ⎰=t c o d u K t 02)()(ττθ 改写成算子形式为)()(2t u pK t c o=θ二 关于捕获锁定两种工作状态PLL 两种工作状态:捕获状态和锁定(或称同步)状态1.捕获过程从输入信号加到锁相环路的输入端开始,一直到环路达到锁定的全过程,称为捕获过程。
一般情况,输入信号频率ωi 与被控振荡器自由振荡频率ωo 不同,即两者之差Δωo ≠0。
若没有相位跟踪系统的作用,两信号之间相差2.锁定状态捕获状态终了,环路的状态稳定在在输入固定频率信号的条件之下,环路进入同步状态后,输出信号与输入信号之间频差等于零,相差等于常数,即()()()e o i o t t t t θωθθ=∆+-()0()e e t t θθ⋅⎫⎪=⎬=⎪⎭常数评价捕获过程性能有两个主要指标。
一个是环路的捕获带Δωp ,即环路能通过捕获过程而进入同步状态所允许的最大固有频差|Δωo |max 。
若Δωo >Δωp ,环路就不能通过捕获进入同步状态。
另一个指标是捕获时间T p ,它是环路由起始时刻t 0到进入同步状态的时刻t a 之间的时间间隔,即捕获时间T p 的大小除决定于环路参数之外,还与起始状态有关。
一般情况下输入起始频差越大,T p 也就越大。
通常以起始频差等于Δωp ,来计算最大捕获时间,并把它作为环路的性能指标之一。
三 动态方程)(sin )()()()(sin )()()()()(1221t p F U K t p t p t p p F U K t t t t e d o e e d o e θθθθθθθθ-=⇒⎪⎭⎪⎬⎫=-=令环路增益d o U K K =锁相环路动态方程的一般形式)(sin )()()(1t p KF t p t p e e θθθ-=频域为: )(sin )()()(1s s KF s s s s e e θθθ-= 线性化后: )()()()(1s s KF s s s s e e θθθ⋅-=)(t p e θ:环路的瞬时频差;dtt d t p i o )()(1θωθ+∆=。
当输入固定频率信号时,)(1t p θ就是固有频差o ω∆; )()()()(sin )()(sin )(t u K t u p F K t U p F K t p KF d o d o e d o e ===θθ )(sin )()(t t U t u e d d θ=:瞬时相差作用下的误差电压瞬时值)()()(t u p F t u d c =:误差电压)(t u d 经环路滤波器过滤之后加到VCO 上的控制电压瞬时值)(sin )()()(2t p KF t u K t p e c o θθ==:控制电压)(t u c 加到VCO 上所引起振荡频p a o T t t =-率)(t v ω相对于自由振荡频率o ω的频差,即控制频差由此得到动态方程物理概念上的含意:瞬时频差=固有频差-控制频差。
锁相环路的稳态相差。
)0(arcsin )(j KF oe ωθ∆=∞锁定后:四 .一阶锁相环路捕获锁定与失锁(不懂,求高手解答) 1、Δωo<K 时的捕获与锁定由于 Δωo<K,该曲线应与横轴相交,图形如图1-14。
图1-14 Δωo<K 时的一阶环动态方程图解 图中A 点为稳定平衡点,B 点为不稳定平衡点 因为位于A 点左边附近的曲线0>∙e θ,即e θ-t 曲线的斜率>0,所以e θ增大,往x 轴正半轴移动,即逐渐靠近A 点;位于A 点右边附近的曲线0<∙e θ,即e θ-t 曲线的斜率<0,所以e θ减小,往x 轴负半轴移动,即逐渐靠近A 点;位于A 点,0=∙e θ,故e θ不变。
可见,A点左右两边的点都是往A 点靠近的,最终到达A 点后便停止下来,即稳定在A 点。
位于B 点,0=∙e θ,e θ也不变,但只要环路中出现噪声使e θ偏离B 点,按照对A 点的分析可知e θ会相A 靠近,且最终稳定在A 点,而不会回到B 点,故B 点不是稳定点,即B 点是不稳定的平衡点。
oe e t p KF t p KF t p ωθθθ∆=-=)(sin )()(sin )()(01图1-15 一阶环捕获过程中相差随时间的变化由上图可见,图中各不同初值的)(t e θ最终都趋向于离0很近的一个常数值,即稳态相差)(∞e θ。
2、Δωo>K 时的失锁状态图1-16 Δωo>K 时的一阶环动态方程图解由上图可见,始终有0>∙e θ,即频差无法为0,)(t e θ将无线增大,没有一个稳定值。
图1-17 一阶环失锁状态的θe(t)、Uc(t)、ωv(t)和的时间图图1-17(c)中,ωv(t)-ωo 为控制频差,ωi-ωv(t)为瞬时频差,而ωi-ωo 为固有频差。
计算表明,它们之间的关系为3、Δωo=K 时的临界状态()e i v t θωω⋅=-=图1-18 Δωo=K时一阶环动态方程图解Δωo=K是一种临界情况。
这时,轨迹正好与横轴相切, A点与B点重合为一点Δωo=K是能够维持环路锁定状态的最大固有频差,称为锁相环路的同步带,用符号ΔωH表示。
就一阶环而言,显然ΔωH=K (1-42)一阶环的捕获带Δωp=K (1-43)一阶环的快捕带ΔωL=K (1-44)在数值上等于环路增益,即ΔωH=Δωp=ΔωL=K五重点计算题以及答案第一道题在p12第二章一 写传输函数相频特性:反映不同频率信号进入系统后的响应时间 幅频特性:反映不同频率信号进入系统后的工作范围线性相位模型)(2t θ)()()()(1t p F K K t p t p e d o e θθθ-=复频域:sp s u t u s t s t c c e e i i →→→→)()()()()()(θθθθ频域:ωj s =sθe(s)=sθ1(s)-KF(s)θe(s)复频域相位模型开环传函:ss F Ks s s H o )()()()(12==θθ 闭环传函:)()()()()(12s KF s s KF s s s H +==θθ )(1)()(1)()(s H s H ss KF ss KF s H o o +=+=误差传函:)(1)(1)(1)()(11)()()()(1s H s H s H s H s H s KF s s s s s H o o e o e e -=+-=+=+==θθ表2-1LRLC n n ==ζωω21环路的“型”数--理想积分环节的个数。