fx-5800P程序QH1-8操作说明
- 格式:pdf
- 大小:454.67 KB
- 文档页数:6
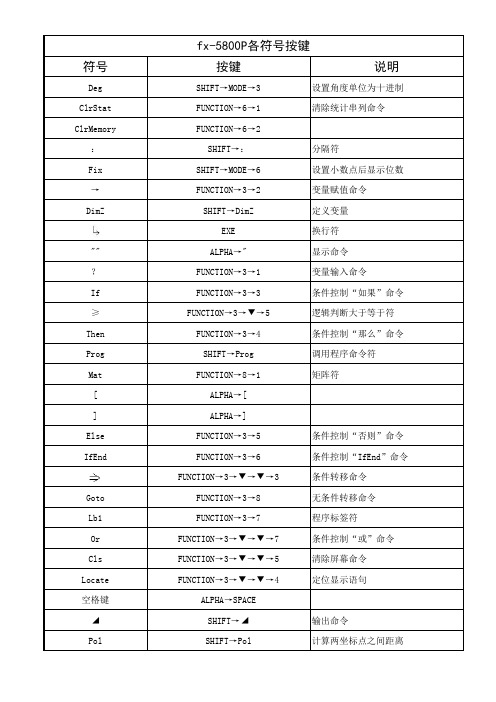

程序命令一、基本操作命令1、:(分隔符):不停止程序的执行。
2、/ (输入):暂停程序的执行并显示当前执行的结果。
3、一(变量赋值):将“一”符号左侧元索(数值、表达式、输入的数据)的值赋值给右侧的变量。
4、?(输入提示):通过按键输入的方法向变量赋值时的输入提示。
5、“ ”(显示):引号中的字母、数字、字符、命令或其他文本作为注释文本,在屏幕上显示出来。
二、转移命令1、Goto~Lbl (无条件转移):无需核对前提条件而被立即执行。
由Got。
n和Lbl n构成,当程序执行到Golo和一个标记名称时,在执行后会转至标记有相同标记名称的Lbl处。
如果在由Got。
n所处的同一程序中没有相应的Lbl n,则会发生转移错误(Go ERROR)。
2、O (条件转移):是对两个变量或算式进行比较,并根据结果决定程序如何转移至紧接于O后的语句。
其句法形式有两种:1)V表达式> V关系运算式> V表达式>OV语句1>:V语句2>:・・・2)V表达式>OV语句:<语句2>:该命令与关系运算子(=、≠∖>、V、2、≤)组合使用,其功能如下:句法I:如果“O”命令左侧的条件为真,则执行〈语句1>,然后执行〈语句2>,并依次执行后面的所有内容。
如果“O”命令左侧的条件为假,则跳过V语句1>,然后执行〈语句2>及其后面的所有内容。
句法2:“O”命令左侧的条件运算结果非零会解释为“真”,所以会执行〈语句1>,然后执行V语句2>及其后面的所有内容。
“O”命令左侧的条件运算结果为零会解释为“假”,因此会跳过V语句而执行〈语句2》及其后面的所有内容。
条件转移流程图(L:左边;R:右边;S:语句)(成立时)~~l关系运算子R c>S S-------- 1 ----- (不成立时)f3、计数转移计数转移有两种:Isz (递增)及Dsz (递减)。
其句法格式为:l)IszV变量>:V语句1>:<语句2>:・・・2) DszV变量>:<语句1>:<语句2>:・・・该语句被执行时,变量的值会被递增(或递减)1,此时变量值非为零,则执行〈语句1>,然后执行〈语句2>,并依次执行后面的所有内容。

C A SI O f x-5800P综合曲线坐标计算程序说明:该程序适用于计算器C ASI O f x-5800P,可计算线路中心的缓和曲线、圆曲线、直线段,中、边桩坐标及切线方位角。
1、α? 输入转角:左转为负,右转为正2、R?输入圆曲线半径3、LS? 输入缓和曲线长度4、J D(DK)?输入交点里程桩号5、X(JD)?输入本交点X 坐标6、Y(JD)?输入本交点Y 坐标7、F W J?输入待求点切线方位角9、J? 输入0 程序计算中桩,输入 1 程序计算边桩10、JSDK? 输入里程桩号主程序名:ZHQ X1. Deg:Fix 4↙2. Lb1 A↙3. "α"?A:?R:"LS"?C:"JD(DK)"?D:"X(JD)"?N:"Y(JD)"?E:"FWJ"?F↙4. Lb1 B↙5. ?J ↙6. C∧2÷24÷R-C∧(4)÷2688÷R∧(3)→P↙7. C÷2-C∧(3)÷240÷R∧2→Q↙8. 90×C÷兀÷R→B↙9. "T=":(R+P)tan(Abs(A)÷2)+Q→T◢10. "E=":(R+P)÷c o s(A÷2)-R→W◢11. "L=":(Abs(A)-2×B)兀R÷180+2×C→L◢12. "ZH=":D-T→G◢13. "HY=":G+C→H◢14. "QZ=":G+L÷2→I◢15. "YH=":G+L-C→K◢16. "HZ=":G+L→M◢17. If A<0:Th en-1→S:E l se1→S:If End↙(本行中0 为数字)18. F+A÷2+90×S→U↙19. W+R→V↙20. N+V×cos(U)→B↙21. E+V×sin(U)→O↙(本行中O 为字母)22. Lbl 1 ↙23. "JS DK"?Z↙24. If Z≤G:Th en T+G-Z→L ↙25. F+180→V ↙26. "FW J=":F→U◢27. Goto 2 ↙28. IfEnd ↙29. If Z≤H:Th en Z-G→L ↙30. L-L∧(5)÷(90×R∧2×C∧2)→V↙31. 30×L∧2×S÷(兀RC)→L ↙32. F+180→P ↙33. F+L→Q↙34. "FW J=":F+3×L→U◢35. Goto 4 ↙36. IfEnd ↙37. If Z≤K:Th en F+A÷2+90×S+180+180(Z-I)×S÷R÷兀→L↙38. "FW J=":L+90×S→U:If U≥360:The n U-360→U◢39. Else U→U◢40. IfEnd:G o to5:If End↙41. If Z≤M:Th en M-Z→L↙42. L-L∧(5)÷(90×R∧2×C∧2)→V↙43. 30×S×L∧2÷(兀RC)→L ↙44. F+A→P ↙45. F+A+180-L→Q↙46. "FW J=":F-3×L+A→U:If U≥360:Th en U-360→U◢47. Else U→U◢48. IfEnd:G o to4:If End↙49. If Z>M:Then Z-M+T→L↙50. F+A→U ↙51. U→V ↙52.G o to2 ↙53. Lbl 2 ↙54. "X=":N+L×cos(V)→X◢55. "Y=":E+L×sin(V)→Y◢56. G o to6 ↙57. If End↙58. Lbl 3 ↙59. ?W60. "XL=":X+W×cos(U-90)→P◢61. "YL=":Y+W×sin(U-90)→Q◢62. "XR=":X+W×cos(U+90)→P◢63. "XL=":Y+W×sin(U+90)→Q◢64. G o to1 ↙65. Lbl 4 ↙66. "X=":N+T×cos(P)+V×cos(Q)→X◢67. "Y=":E+T×sin(P)+V×cos(Q)→Y◢68. G o to6 ↙69.Lbl 5 ↙70. "X=":B+R×cos(L)→X◢71. "Y=":O+R×sin(L)→Y◢(本行中O 为字母)72. G o to6 ↙73. Lbl 6 ↙74. J=1 G o to3 ↙75. G o to1 ↙。

CASIO 5800程序编辑说明CASIO-5800P计算器程序编辑说明一(程序名称:直线坐标计算——Z-X-Z程序内容:1. “X=“,A : “Y=“,B : “Q=”,Q2. LbI 03. “N=”,N : “S=”,S : ”E=”,E4. A + N cos(Q) ?D : B + N sin(Q) ?F5. D + S cos(Q + E) ?6. F + S sin(Q + E) ?7. Goto 0内容说明:A 、 B——以知点即起算点的x,y坐标值;Q——直线段方位角;N——直线段距离;S——边桩距离;E——转向角;(左转为“,E”,右转为“E”) 二(程序名称:圆曲线任意坐标计算——ZY-YZ程序内容:1. “Q=”,Q : “ X= ”,W : “ Y= “,K : “R= ”,R:“F=”,F : “N=”,N : “U=”,U2. R tan(N?2) ? T3. Q–T ? A4. W+T cos(F+180) ?M : K+T sin(F+180) ?G5. LbI 06. “H=” ,H : ” S=” ?,S : “E=” ,E7. Abs(H - A) ? D8. 180 D?(Rπ) ?О9. R sin(О) ?C10. R (1-cos(О)) ?D11. M+C cos(F) ? I : G+C sin(F) ? J12. I+D cos(F+90U) ?X : J+D sin(F+90U) ? Y13. X+S cos(F+ОU+E) ?14. Y+S sin(F+ОU+E) ?15. Goto 0内容说明: Q——交点里程桩号;W 、K——交点X、Y坐标;R——圆曲线半径;F——前切线正方位角;N——偏角;(即转向角)U——控制偏角条件;(左偏角输入“,1”,右偏角输入“+1”)H——圆曲线上任意一点里程桩号;S——中桩至边桩距离;E——夹角;(左边桩输入“,E”,右边桩输入“E”) 三(程序名称:极坐标放样元素计算——J-Z-B-F-J程序内容: 1. “X=”,A : “Y=”,B : “X0=”,C :“Y0=”,D2. PoI ( C - A,D - B ) : CIs3. If J,0 : Then J+360?E : EIse J?E:IfEnd:E?DMS?4. I?5. LbI 06. “XN=”,U7. WhiIe U?0 (输入“0”即结束程序)8. “YN=”,V9. PoI(U-A,V-B):CIs10. If J,0:Then J+360?F:EIse J?F:IfEnd:F?DMS?11. I?12. F – E ? H13. If H,0:Then H+360?H:IfEnd : H?DMS?14. Goto 0内容说明: A、B——测站点坐标C、D——0方向点坐标E——计算出的测站点至0方向点的方位角I——计算出的测站点至0方向点的距离U,V——N方向点坐标F——计算出的测站点至N方向点的方位角I——计算出的测站点至N方向点的距离H——计算出的0方向与N方向的水平夹角表格:点号 X坐标 Y坐标距离方位角起止点号夹角测站点0点 0?01点 0?12点 0?2四(程序名称:有缓和曲线的圆曲线上点位坐标计算 F-Y-X-Y 程序内容:1(“Q=”,Q :“J=”,J :“K=”,K :“R=”,R :“F=”,F :“N=”,N :“I =”,I :“U=”,U2(6 ? Dim Z3(90 I?(Rπ) ? G (切线角,即缓和曲线角计算)3 24 4(I?(24R) - I?(2688R) ? P (内移距)32 5(I?2 - I?(240R) ? M (切线增值)6((R+P) tan (N?2)+M ? T (切线长)7(πRN ? 180 + I ? L (曲线长)8(Q – T ? A : A + I ? B :A + L ? D : D – I ? C9(J + T cos(F+180) ? Z[1] : K + T sin (F+180) ? Z[2]10(LbI 011(“H=”,H :“S=”,S :“E=”,E12(H – A – I ? Z13(180 Z?(Rπ) + G ? О14(R sin(О) + M ? X15(R (1 –cos(О)) + P ? Z16(Z[1]+ Xcos( F ) ? Z[3] : Z[2] + X sin( F )? Z[4]17(Z[3]+ Z cos (F + 90U ) ? Z[5] :Z[4] + Z sin(F + 90U )? Z[6]18(Z[5]+ S cos ( F +ОU + E ) ?19. Z[6] + S sin( F+ОU + E ) ?20(Goto 0内容说明: Q——交点里程桩号;J 、K——交点X、Y坐标;R——圆曲线半径;F——前切线正方位角;N——偏角;(即转向角)I——缓和曲线长;U——控制偏角条件;(左偏角输入“,1”,右偏角输入“+1”) H——有缓和圆曲的线圆曲线上任一点里程桩号;S——中桩至边桩距离;E——夹角;(左边桩输入“,E”,右边桩输入“E”)第9项——ZH点坐标;五(程序名称:缓和曲线段上点位坐标计算 F-H-X-Y程序内容:1 (“Q=”,Q :“J=”,J :“K=”,K :“R=”,R : “F=”,F :“N=”,N :“I =”,I :“U=”,U2(12 ? Dim Z32 3(I?2 - I?(240R) ? M (切线增值)3 24 4(I?(24R) - I?(2688R) ? P (内移距)5(πRN ? 180 + I ? L (曲线长)6(M+ (R+P) tan (N?2) ? T (切线长)7(Q – T ? A : A + I ? B : (ZH : HY)A + L ? D : D – I ? C (HZ:YH)8(J + T cos(F+180) ? Z[1] : K + T sin (F+180) ? Z[2] 9. J + T cos(F+NU) ? Z[3] : K + T sin (F+NU) ? Z[4] 10(LbI 011(“H=”,H :“S=”,S :“E=”,E12. H,B? Goto 113. H,D? Goto 214(LbI 115(Abs(H - A) ? Z216(90 Z?(πR I ) ?О229445 17(Z - Z?(40 RI) + Z?(3456 RI) ? X 7331155318(Z?(6 RI) – Z?(336 RI) + Z?(42240 RI) ? Z 19(Z[1]+ Xcos( F ) ? Z[5] : Z[2] + X sin( F )? Z[6] 20(Z[5]+ Z cos (F + 90U ) ? Z[7] :Z[6] + Z sin(F + 90U )? Z[8]21(Z[7]+ S cos ( F +ОU + E ) ?22. Z[8] + S sin( F+ОU + E ) ?23(Goto 024. LbI 225. D - H ? Z226(90 Z?(πR I ) ?О229445 27(Z - Z?(40 RI) + Z?(3456 RI) ? X 7331155328(Z?(6 RI) – Z?(336 RI) + Z?(42240 RI) ? Z 29(Z[3]+ X cos( F + NU+180 ) ? Z[9] :Z[4] + X sin( F + NU+180)? Z[10]30(Z[9]+ Z cos (F + NU+180 - 90U ) ? Z[11] :Z[10] + Z sin(F + NU+180 - 90U )? Z[12]31(Z[11]+ S cos ( F +NU+180 - ОU -(180 – E)) ?32. Z[12] + S sin( F+ NU+180 - ОU -(180 - E)) ?33. Goto 0内容说明: Q——交点里程桩号;J 、K——交点X、Y坐标;R——圆曲线半径;F——前直线段正方位角;N——偏角;(即转向角)I——缓和曲线长;U——控制偏角条件;(左偏角输入“,1”,右偏角输入“+1”) H——缓和曲线段上任一点里程桩号;S——中桩至边桩距离;E——夹角;(左边桩输入“,E”,右边桩输入“E”)第8项——ZH点坐标第9项——HZ点坐标。


1.公路铁路任意线型单元路线中桩边桩坐标及放样极坐标的通用计算程序(ZHYDLDY ZBJS)作者:琚新涛QQ:25425579一、线路中线的线型分析公路铁路线路按照线型分类,可分为直线、圆曲线线路和曲线线路。
一般情况下,缓和曲线是连接直线与圆曲线的过渡性曲线,该缓和曲线称为完全的缓和曲线。
在特殊的情况下(公路立交匝道),截取完全缓和曲线上的一段,其两端外连接两个不等半径的圆曲线,即将一个半径逐渐过渡到另一半径,这种缓和曲线称为不完全缓和曲线。
所以,缓和曲线分为完全的缓和曲线和不完全的缓和曲线两种。
那么,一条很长的公路铁路线路可划分为一个一个单一线型的线路单元。
即直线单元,圆曲线单元,完全缓和曲线单元和不完全缓和曲线单元。
各类线型线路单元具有各自不同的几何性质,直线单元式半径无穷大而曲率为零且始终保持不变的线型。
圆曲线单元是始终保持某一半径和相应曲率不变的线型。
缓和曲线单元是半径和曲率都处处不等且均匀渐变的线型,即半径和曲率随线路中线点位呈线性变化。
完全缓和曲线单元是将直线的零曲率均匀渐变到另一半径圆曲线曲率的线型,不完全缓和曲线单元是将某一半径圆曲线曲率均匀渐变到另一半径圆曲线曲率的线型。
于此可见,不完全缓和曲线路线是所有线型线路单元中最一般的线型单元。
LbI D:Fix 3:Deg:“GTL ZHY ZBZ FYJS”:”CZD ZBN(X)=”?R:”CZD ZB E(Y)=”?S:”DY QD ZBN(X)=”?A:”DY QD ZB E(Y)=”?B:”DY QDBJ(R1)=”?T:”DY QD LC(L1)=”?D:”DY QD QX FWJ=”?E:”DY ZD BJ(R2)=”?U:”DY ZD LC(L2)=”?G:”DYQD—ZD QXZX(Z=-1,Y=+1)=”?WWT→C:WU→F:0→I:0→J:(C-F)÷(2CF(G-D))→HLbI A:”FYD DY ZZ LC=”?O:IF O=-1:Then Goto C:IfEnd:If O<D:Then Goto B:IfEndIF O>G:Then Goto B:IfEnd“ZZ-BZ FXJ(Z-,Y+)=”?P:”ZZ-BZ PJ=”?Q:E+((O-D)÷C+H(O-D)2)r→V:If V<0:Then V+360→V:IfEndIf V≥360:Then V-360→V:IfEnd“ZZD QX FWJ=”:V▶DMS◢Rad:A+∫(cos(E。
卡西欧5800p计算器所有编程命令解释卡西欧5800p计算器所有编程命令解释1. 句法 1:Locate <列数>, <行数>,<数值> Norm 1 指数显示句法2:Locate <列数>, <行数>,<表达式> Norm 2 小数显示句法3:Locate <列数>, <行数>, "字符串"fx-5800P 的屏幕最多可以显示4 行、16 列字符,2. 因此定位语句中的列数值应为大于等于1、小于等??x 只显示, 于16 的整数,行数值应为大于等于1、小于等于字符+??x 显示字符+, 4 的整数。
10. Lbi n ~ Goto n Goto n~Lbl n ,x 显示 x?“字符”,x 显示字符+,无条件转移至 Lbi n 位置有?则不显示该变量当前值11. Getkey3.(判断表达式) 语句1 : 语句2。
如果判断表达式为真(或非零),则不跳过语句1. 返回与上次按键相对应的代码,Getkey=如果判断表达式为假(或是零),则会跳过语句1.12. DO ~ LpWhile循环语句4. If...then…else…ifendDo <语句块> LpWhile<条件> 如果语句为真,则执行then(不执行else),然后先执行语句块,然后测试条件,条件为真时重复执执行ifend. 行语句块,否则执行<条件>后的语句。
无,论条件如果语句为假,则执行else(不执行then),然后是否为真,语句块至少被执行一次。
执行ifend.13. Pol5. Break 中断语句计算两坐标点之间距离,坐标为(4,4),与原点的距离就是POL(4,4)=4?214. Abs 中断For,Do,While循环,并从该循环的下个命令起继续运行求绝对值15. Fix6. Dsz 取整数函数Fix(Rnd*11) ,取0 ~ 11的随机整数16. Rnd使控制变量递减一,在变量的值为零时执行转移随机函数17. 角度单位设置语句 7. Isz Deg:设置角度单位为十进制度,按键输入Deg。
目录前言第1章复数及基于统计串列存储数据的编程方法与程序1.1 复数的几何表示方法1.2 复数显示格式的应用1.3 共轭复数1.4 复数形式坐标反算程序(QH1-4)1.5 基于统计串列输入数据的极坐标法放样程序(QH1-5)1.6 复数形式高斯平面坐标线性变换参数计算及批量坐标变换程序(QH1-6)1.7 复数形式建筑坐标与测量坐标的相互变换程序(QH1-7)1.8 复数形式单一闭、附合与无定向导线近似平差原理与程序(QH1-8)1.9 复数形式支导线坐标计算程序(QH1-9)第2章公路与铁路路线平纵曲线正、反算原理与程序2.1 单交点基本型路线曲线坐标正算原理2.2 缓和曲线线元坐标正算原理2.3 缓和曲线线元坐标反算原理2.4 圆曲线与直线线元坐标正、反算原理2.5直线与缓和曲线线元斜交的交点坐标计算原理2.6直线与圆曲线及直线线元斜交的交点坐标计算原理2.7 单交点基本型曲线坐标正、反算程序(QH2-7)2.8 线元法任意路线与匝道曲线坐标正、反算程序(QH2-8)2.9 线元法任意路线与匝道曲线直线斜交程序(QH2-9)2.10 任意个变坡点的连续竖曲线高程计算程序(QH2-10)第3章公路与铁路路线施工测量综合程序3.1 圆曲线加宽值计算程序(QH3-1)3.2 缓和曲线加宽值计算程序(QH3-2)3.3 路线纵断面中平测量记录计算程序(QH3-3)3.4 路线填、挖方工程量计算程序(QH3-4)3.5 方格网法土方量计算程序(QH3-5)3.6 解析法带弓形多边形周长与面积计算程序(QH3-6)第4章公路与铁路路线施工控制测量程序4.1 1954北京坐标系与1980西安坐标系高斯投影正算、反算及换带程序(QH4-1)4.2 测角前方交会坐标计算程序(QH4-2)4.3 测角后方交会坐标计算程序(QH4-3)4.4 测边后方交会点坐标计算程序(QH4-4)4.5 施工水准测量记录计算程序(QH4-5)4.6 四等水准测量计算程序(QH4-6)4.7 单一闭附合图根水准路线近似平差程序(QH4-7)4.8 高斯平面坐标系正形变换程序(QH4-8)复数形式单一闭、附合与无定向导线近似平差程序(QH1-8)计算案例QH1-8程序位于图书第21~24页,单一闭合导线案例数据见第18页图1-13,单一附合导线案例数据见第18页图1-14,单一无定向导线案例数据见第19页图1-15。
(1) 单一闭合导线计算案例按键进入COMP模式,按键执行ClrStat 命令清除统计存储器。
按键进入REG 模式,按图1-13导线方位角推算路线A →B →1→2→3→B →A 为前进方向,在统计串列List X 顺序输入图1-13所注的5个水平角观测值,在统计串列List Y 顺序输入4个水平距离观测值,因5个水平角均为左角,所以全部输入正角值,结果见图1-17所示。
执行程序QH1-8,用户输入已知数据、屏幕提示及操作过程如下:屏幕提示按键 说明SINGLE TRAVE ADJUST QH1-8显示程序标题CLOSE Or CONNECT TRAVE 检测串列数据为闭附合导线 ANGLE NUM=5显示统计串列的水平角数 SIDE NUM=4显示统计串列的水平距离数 UNKNOWN P NUM=3显示未知点数 CLOSE(0),CONNECT TRAVE(0)=? 0输0为闭合导线 XA(m),0αA ¼B(Deg)=? 2538811.409输入A 点的坐标 YA(m)=? 505114.225XB(m)=? 2538506.321输入B 点的坐标 YB(m)=?505215.652DIST A ¼B(m)=321.506 显示A →B 的平距 αA ¼B(DMS)=161°36′37.91″ 显示A →B 的方位角 α CLOSE ERROR(S)=50.000显示方位角闭合差CHECK α CLOSE ERROR(S)=0.000显示方位角闭合差检核值 DELTA X(m)=0.057 显示坐标增量闭合差 DELTA Y(m)=-0.070RELAT CLOSE ERROR=1÷4335显示导线全长相对闭合差 POINT n=1显示未知点号Xp(m)=2538445.195 显示第1个未知点的坐标 Yp(m)=505301.329POINT n=2显示未知点号Xp(m)=2538493.090 显示第2个未知点的坐标 Yp(m)=505365.640POINT n=3显示未知点号Xp(m)=2538569.667 显示第3个未知点的坐标 Yp(m)=505261.442POINT n=4显示未知点号Xp(m)=2538506.321 显示计算到已知点B 的坐标 Yp(m)=505215.652CHECK X(m)=0.000 显示B 点坐标检核结果 CHECK Y(m)=0.000QH1-8END程序运行结束显示当只知道图1-13所示起算边A →B 的方位角、不知道A 点的坐标时,执行程序QH1-8计算其未知点坐标的操作过程如下:屏幕提示按键 说明SINGLE TRAVE ADJUST QH1-8显示程序标题CLOSE Or CONNECT TRAVE 检测串列数据为闭附合导线数据ANGLE NUM=5 显示统计串列的水平角数 SIDE NUM=4显示统计串列的水平距离数图1-17 REG 模式输入图1-13闭合导线的水平角与平距UNKNOWN P NUM=3显示未知点数CLOSE(0),CONNECT TRAVE(0)=? 0输0为闭合导线XA(m),0αA¼B(Deg)=? -1输入任意0的数值αA¼B(Deg)=? 1613638输入A→B的方位角XB(m)=? 2538506.321输入B点的坐标YB(m)=? 505215.652α CLOSE ERROR(S)=50.000显示方位角闭合差CHECK α CLOSE ERROR(S)=0.000显示方位角闭合差检核值DELTA X(m)=0.057显示坐标增量闭合差DELTA Y(m)=-0.070RELAT CLOSE ERROR=1÷4335显示导线全长相对闭合差POINT n=1显示未知点号Xp(m)=2538445.195显示第1个未知点的坐标Yp(m)=505301.329POINT n=2显示未知点号Xp(m)=2538493.090显示第2个未知点的坐标Yp(m)=505365.640POINT n=3显示未知点号Xp(m)=2538569.667显示第3个未知点的坐标Yp(m)=505261.442POINT n=4显示未知点号Xp(m)=2538506.321显示计算到已知点B的坐标Yp(m)=505215.652CHECK X(m)=0.000显示B点坐标检核结果CHECK Y(m)=0.000QH1-8END 程序运行结束显示按键进入REG模式,按图1-14导线方位角推算路线A→B→1→2→3→4→C→D为前进方向,在统计串列List X顺序输入图1-14所注的6个水平角观测值,在统计串列List Y顺序输入5个水平距离观测值,因6个水平角均为左角,所以全部输入正角值,结果见图1-18所示。
执行程序QH1-8,用户输入已知数据、屏幕提示及操作过程如下:屏幕提示按键说明SINGLE TRAVE ADJUST QH1-8 显示程序标题CLOSE Or CONNECT TRAVE 检测串列数据为闭附合导线ANGLE NUM=6显示统计串列的水平角数SIDE NUM=5显示统计串列的水平距离数UNKNOWN P NUM=4 显示未知点数CLOSE(0),CONNECT TRAVE(0)=? 1输入任意非0数值为附合导线XA(m),0αA¼B(Deg)=? 2532814.23输入A点的坐标YA(m)=? 501706.035XB(m)=? 2532507.693输入B点的坐标YB(m)=? 501215.632DIST A¼B(m)=578.325显示A→B的平距αA¼B(DMS)=237°59′30″显示A→B的方位角XC(m)=? 2532166.741输入C点的坐标YC(m)=? 501757.271XD(m),0αC¼D(Deg)=? 2532649.119输入D点的坐标YD(m)=? 502270.174DIST C¼D(m)=704.101显示C→D的平距αC¼D(DMS)=46°45′24.1″显示C→D的方位角α CLOSE ERROR(S)=-36.107显示方位角闭合差CHECK α CLOSE ERROR(S)=0.000显示方位角闭合差检核值DELTA X(m)=-0.149显示坐标增量闭合差DELTA Y(m)=0.149RELAT CLOSE ERROR=1÷3519显示导线全长相对闭合差RELAT CLOSE ERROR OVER!POINT n=1显示导线全长相对闭合差超限显示未知点号Xp(m)=2532299.824显示第1个未知点的坐标Yp(m)=501303.798POINT n=2显示未知点号Xp(m)=2532186.282显示第2个未知点的坐标Yp(m)=501383.969POINT n=3显示未知点号Xp(m)=2532192.450显示第3个未知点的坐标Yp(m)=501556.396POINT n=4显示未知点号Xp(m)=2532179.740显示第4个未知点的坐标Yp(m)=501655.637POINT n=5显示未知点号Xp(m)=2532166.741显示计算到已知点C的坐标Yp(m)=501757.271CHECK X(m)=0.000显示C点坐标检核结果CHECK Y(m)=0.000QH1-8END 程序运行结束显示与图1-13所示的闭合导线相同,当A点的坐标未知时,起算数据也可以输入起算边A→B的方位角与B 点的坐标;当未知D点的坐标时,起算数据也可以输入C点的坐标与C→D边的方位角。
图1-18 REG模式输入图1-14附合导线的水平角与平距按键进入REG模式,按图1-15导线方位角推算路线A→1→2→3→4→B为前进方向,在统计串列List X顺序输入图1-15所注的4个水平角观测值,在统计串列List Y顺序输入5个水平距离观测值,因4个水平角均为左角,所以全部输入正角值,结果见图1-19所示。
执行程序QH1-8,用户输入已知数据、屏幕提示及操作过程如下:屏幕提示按键说明SINGLE TRAVE ADJUST QH1-8 显示程序标题NO DIRECT TRAVE 检测串列数据为无定向导线ANGLE NUM=4显示统计串列的水平角数SIDE NUM=5显示统计串列的水平距离数UNKNOWN P NUM=4显示未知点数XA(m)=? 2532507.693输入A点已知坐标YA(m)=? 501215.632XB(m)=? 2532166.741输入B点已知坐标YB(m)=? 501757.271RELATIVE ERROR=1÷3330显示导线全长相对误差Z=0.9996997073∠157.0086143显示转换复数的极坐标形式POINT NUM=1显示未知点号Xp(m)=2532299.843显示第1个未知点的坐标Yp(m)=501303.822POINT NUM=2显示未知点号Xp(m)=2532186.312显示第2个未知点的坐标Yp(m)=501384.003POINT NUM=3显示未知点号Xp(m)=2532192.457显示第3个未知点的坐标Yp(m)=501556.412POINT NUM=4显示未知点号Xp(m)=2532179.742显示第4个未知点的坐标Yp(m)=501655.645DELTA XB(m)=0.000显示B点坐标检核结果DELTA YB(m)=0.000QH1-8END 程序运行结束显示图1-19 REG模式输入图1-15无定向导线的水平角与平距。