实验六 状态图
- 格式:doc
- 大小:94.22 KB
- 文档页数:4
序号: 1200134000101组别: 5深圳大学实验报告课程名称:材料科学基础实验实验项目名称:二元合金显微组织分析学院:材料学院专业:材料科学与工程指导教师:钱海霞报告人:叶淳懿学号:2016200084 班级:实验时间:2018.12.19实验报告提交时间:教务部制数据处理分析纯铁,退火态,4%硝酸酒精腐蚀,物镜10倍,铁素体(α相)由图可知,经过4%硝酸酒精腐蚀的退火态纯铁拥有大小较为明显和均匀的晶粒,且均为铁素体(α相)。
由熔融态纯铁随着温度下降,先析出δ相铁;随着温度继续下降,δ相铁发生转变变成γ相铁。
当温度降至912℃时,γ相铁开始转变为α相铁,即图中铁素体。
20钢,退火态,4%硝酸酒精腐蚀,物镜10倍,铁素体,珠光体经过4%硝酸酒精腐蚀的退火态20钢图中有浅色与黑色两种晶粒分散分布,其中浅色为铁素体,黑色为珠光体。
为亚共析钢。
20钢冷却时先匀晶转变析出δ相固溶体,之后发生包晶转变析出γ相,此时仍有δ相,但随着温度降低全部转变为奥氏体。
温度继续冷却,开始析出铁素体,并逐渐增多。
在770℃发生共析转变形成珠光体(α+FeC)。
345钢,退火态, 4%硝酸酒精腐蚀,物镜10倍,铁素体,珠光体45钢也是亚共析钢,由图可知,相比起20钢,黑色的珠光体含量更加多,且珠光体的晶粒更大。
45钢冷却时先匀晶转变析出δ相固溶体,之后发生包晶转变析出γ相,此时仍有液相,但随着温度降低全部转变为奥氏体。
其余过程与20钢相比并无太大差异,不再赘述。
60钢,退火态,4%硝酸酒精腐蚀,物镜10倍,铁素体,珠光体由图可知60钢仍是亚共析钢,但绝大部分已经是珠光体了,浅色的铁素体只占其中很小的一部分。
45钢冷却时直接匀晶转变析出γ相,无δ相析出。
其余过程与20钢相似,不再赘述。
T8钢,退火态,4%硝酸酒精腐蚀,物镜40倍,铁素体,渗碳体,珠光体T8钢为共析钢,从图中可看到黑绿色为渗碳体,浅色为铁素体。
他们共同构成了珠光体。
精馏塔实验装置说明书一、实验目的1.了解板式塔的基本构造,精馏设备流程及各个部分的作用,观察精馏塔工作时塔板上的水里状况2.学会识别精馏塔内出现的几种操作状态,并分析这些操作状态对塔性能的影响3.学习精馏塔性能参数的测量方法,并掌握其影响因素。
4.研究开车过程中,精馏塔在全回流条件下,塔顶温度等参数随时间的变化情况5.测定精馏塔在全回流和某一回流比下连续精馏时,稳定操作后的全塔理论塔板数,总板效率。
二、实验原理对于二元物系,如果已知其气液平衡数据,则根据精馏塔的原料组成。
进料热状况、操作回流比及塔顶馏出液组成、塔底馏出液组成,可以求出该塔的理论板数以及总板效率。
全塔效率ηPtN N =t N —理论塔板数 p N —实际塔板数,10部分回流时,进料热状况参数的计算式为mmF B r r t t Cpm q +-⨯=)(q 线斜率=1-q q t F --进料温度; t B --泡点温度Cp m —进料液体在平均温度下的比热=()CKmol KJ x M c x M c p p ︒⋅+222111(乙醇ckg KJc p ︒⋅=07.31 、正丙醇c kg KJc p ︒⋅=85.22)r m —混合液体在泡点温度下汽化潜热=()KmolKJ x M r x M r 222111+(kgkJr kgkJr 680;81921==)三、装置和流程(一) 精馏塔(二) 物系 (乙醇─正丙醇)1. 纯度: 化学或分析纯.2. 平衡关系: 见表1.3. 料液浓度:15-25%(乙醇质量百分数).4. 浓度分析用阿贝折光仪.折光指数与溶液浓度的关系见表2. 表 1 常压下乙醇—正丙醇t-x-y 数据表( 均以乙醇摩尔分率表示,x-液相,y-气相 ,t/℃ )组成与泡点温度关系: 359.97861.271389.92+-=x x t (1) 式中: t —摄氏度,℃;x —乙醇在液相中的摩尔分率。
上列平衡数据摘自: J.Gmebling,U.onken •Vapor ─liquid•Equilibrium DataCollection ─Organic Hydro xy Compounds: Alcohols(p.336)。
实验六 帧同步一、实验目的1.掌握集中插入式帧同步码识别器工作原理。
2.掌握同步保护原理。
3.掌握假同步、漏同步、捕捉态〔失步态〕、维持态〔同步态〕概念。
二、实验原理在时分复用通信系统中,为了正确地传输信息,必须在信息码流中插入一定数量的帧同步码。
帧同步码可以集中插入,也可以分散插入。
本实验系统中帧同步码为7位巴克码,集中插入到每帧的第2至第8个码元位置上。
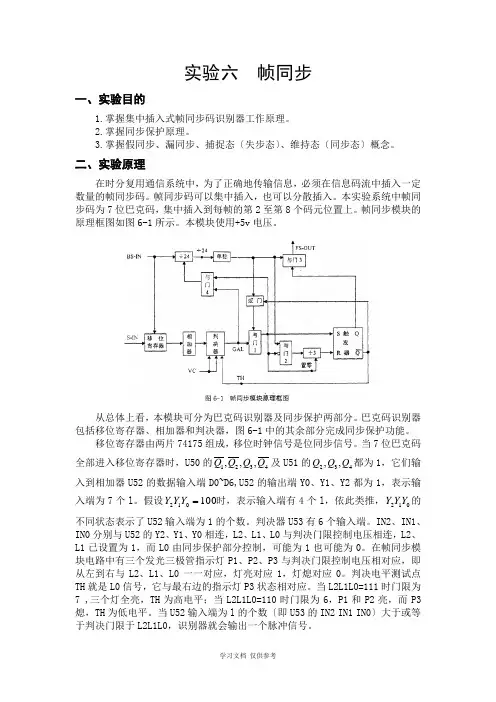
帧同步模块的原理框图如图6-1所示。
本模块使用+5v 电压。
从总体上看,本模块可分为巴克码识别器及同步保护两部分。
巴克码识别器包括移位寄存器、相加器和判决器,图6-1中的其余部分完成同步保护功能。
移位寄存器由两片74175组成,移位时钟信号是位同步信号。
当7位巴克码全部进入移位寄存器时,U50的4321,,,Q Q Q Q 及U51的432,,Q Q Q 都为1,它们输入到相加器U52的数据输入端D0~D6,U52的输出端Y0、Y1、Y2都为1,表示输入端为7个l 。
假设100012 Y Y Y 时,表示输入端有4个l ,依此类推,012Y Y Y 的不同状态表示了U52输入端为1的个数。
判决器U53有6个输入端。
IN2、IN1、IN0分别与U52的Y2、Y1、Y0相连,L2、L1、L0与判决门限控制电压相连,L2、L1已设置为1,而L0由同步保护部分控制,可能为1也可能为0。
在帧同步模块电路中有三个发光三极管指示灯P1、P2、P3与判决门限控制电压相对应,即从左到右与L2、L1、L0一一对应,灯亮对应1,灯熄对应0。
判决电平测试点TH 就是L0信号,它与最右边的指示灯P3状态相对应。
当L2L1L0=111时门限为7 ,三个灯全亮,TH 为高电平;当L2L1L0=110时门限为6,P1和P2亮,而P3熄,TH 为低电平。
当U52输入端为l 的个数〔即U53的IN2 IN1 IN0〕大于或等于判决门限于L2L1L0,识别器就会输出一个脉冲信号。
实验六步进电动机实验一、实验目的1、通过实验加深对步进电动机的驱动电源和电机工作情况的了解。
2、掌握步进电动机基本特性的测定方法。
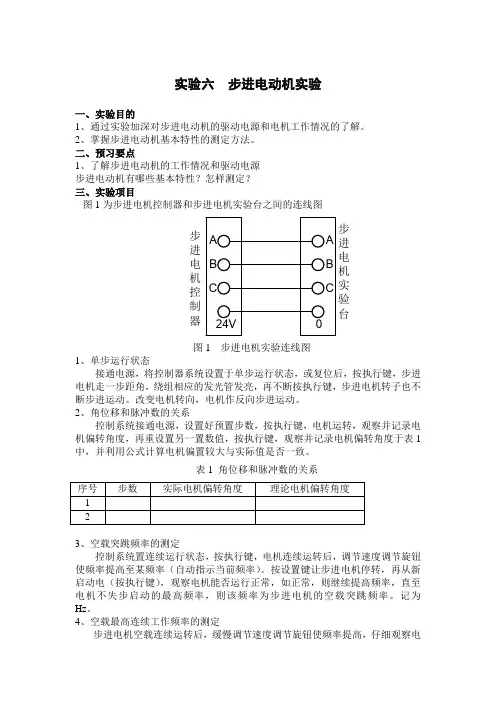
二、预习要点1、了解步进电动机的工作情况和驱动电源步进电动机有哪些基本特性?怎样测定?三、实验项目图1为步进电机控制器和步进电机实验台之间的连线图步进电机控制器步进电机实验台24V0A AB BC C图1 步进电机实验连线图1、单步运行状态接通电源,将控制器系统设置于单步运行状态,或复位后,按执行键,步进电机走一步距角,绕组相应的发光管发亮,再不断按执行键,步进电机转子也不断步进运动。
改变电机转向,电机作反向步进运动。
2、角位移和脉冲数的关系控制系统接通电源,设置好预置步数,按执行键,电机运转,观察并记录电机偏转角度,再重设置另一置数值,按执行键,观察并记录电机偏转角度于表1中,并利用公式计算电机偏置较大与实际值是否一致。
表1 角位移和脉冲数的关系序号步数实际电机偏转角度理论电机偏转角度123、空载突跳频率的测定控制系统置连续运行状态,按执行键,电机连续运转后,调节速度调节旋钮使频率提高至某频率(自动指示当前频率)。
按设置键让步进电机停转,再从新启动电(按执行键),观察电机能否运行正常,如正常,则继续提高频率,直至电机不失步启动的最高频率,则该频率为步进电机的空载突跳频率。
记为Hz。
4、空载最高连续工作频率的测定步进电机空载连续运转后,缓慢调节速度调节旋钮使频率提高,仔细观察电机是否不失步,如不失步,则再缓慢提高频率,直至电机能连续运转的最高频率,则该频率为步进电机空载最高连续工作频率。
记为Hz。
5、转子振动状态的观察步进电机空载连续运转后,调节并降低脉冲频率,直至步进电机声音异常或出现电机转子来回偏摆即为步进电机的振荡状态。
6、定子绕组中电流和频率的关系在步进电机电源的输出端串联一只直流电流表(注意+、-端)使步进电机连续运转,由低到高逐渐改变步进电机的频率,读取并记录6组电流表的平均值、频率值于表2中表2 定子绕组电流和频率的关系序号 1 2 3 4 5 6f(Hz)I(A)7、平均转速和脉冲频率的关系接通电源,将控制系统设置于连续运转状态,再按执行键,电机连续运转,改变速度调节旋钮,测量频率f与对应的转速n,即n=f(f)。
实验六双液系气—液平衡相图的绘制一、实验目的及要求1.掌握回流冷凝法测定溶液沸点的方法。
2.绘制环乙烷-异丙醇双液系的沸点-组成图,确定其恒沸组成和恒沸温度。
3.了解阿贝(Abbe)折射仪的构造原理,掌握阿贝(Abbe)折射仪的使用方法。
二、实验原理常温下,两种液态物质相互混合而形成的液态混合物,称为双液系,若两种液体能按任意比例相互溶解,则称为完全互溶双液系。
液体的沸点是指液体的饱和蒸气压和外压相等时的温度。
在一定的外压下,纯液体的沸点是恒定的。
但对于完全互溶双液系,沸点不仅与外压有关,而且还与其组成有关,并且在沸点时,平衡的气-液两相组成往往不同。
在一定的外压下,表示溶液的沸点与平衡时气-液两相组成关系的相图,称为沸点-组成图, 即T~ X。
完全互溶双液系的沸点-组成图可分为三类:(1)液体与拉乌尔定律的偏差不大,在T~ X图上,溶液的沸点介于二种纯液体沸点之间(见图1(a)),如苯-甲苯系统等。
(2)实际溶液由于两组分的相互影响,常与拉乌尔定律有较大的负偏差,在T~X图上溶液存在最高沸点(见图1(b)),如卤化氢-水系统等。
(3)实际溶液与拉乌尔定律有较大的正偏差,在T~ X图上溶液存在最低沸点(见图1(c)),如水-乙醇、苯-乙醇系统等。
2、3类溶液,在最高或最低沸点时的气-液两相组成相同,这些点称为恒沸点,此浓度的溶液称为恒沸点混合物。
相应的最高或最低沸点称为恒沸温度,相应的组成称为恒沸组成。
本实验所要测绘的环已烷-异丙醇系统的沸点-组成图即属于图1(c)类型,其绘制原理如下:图1 完全互溶双液系的沸点-组成图当系统总组成为x的溶液加热时,系统的温度沿虚线上升,当溶液开始沸腾时,组成为y的气相开始生成,继续加热,则系统的温度继续上升,同时气-液两相的组成分别沿气相线和液相线上箭头指示方向变化,两相的相对量遵守杠杆规则而同时发生变化。
显然,若设法保持气-液两相的相对量一定,就可使得系统的温度恒定不变。
实验六时间片轮转调度一、实验目的·调试EOS 的线程调度程序,熟悉基于优先级的抢先式调度。
·为EOS 添加时间片轮转调度,了解其它常用的调度算法。
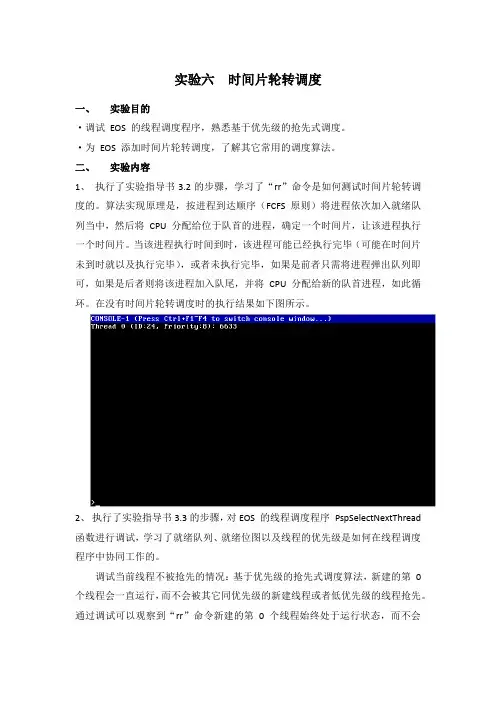
二、实验内容1、执行了实验指导书3.2的步骤,学习了“rr”命令是如何测试时间片轮转调度的。
算法实现原理是,按进程到达顺序(FCFS 原则)将进程依次加入就绪队列当中,然后将CPU 分配给位于队首的进程,确定一个时间片,让该进程执行一个时间片。
当该进程执行时间到时,该进程可能已经执行完毕(可能在时间片未到时就以及执行完毕),或者未执行完毕,如果是前者只需将进程弹出队列即可,如果是后者则将该进程加入队尾,并将CPU 分配给新的队首进程,如此循环。
在没有时间片轮转调度时的执行结果如下图所示。
2、执行了实验指导书3.3的步骤,对EOS 的线程调度程序PspSelectNextThread 函数进行调试,学习了就绪队列、就绪位图以及线程的优先级是如何在线程调度程序中协同工作的。
调试当前线程不被抢先的情况:基于优先级的抢先式调度算法,新建的第0 个线程会一直运行,而不会被其它同优先级的新建线程或者低优先级的线程抢先。
通过调试可以观察到“rr”命令新建的第0 个线程始终处于运行状态,而不会被其它具有相同优先级的线程抢先。
对在EOS 内核中实现这种调度算法进行调试,刷新“就绪线程队列”窗口,观察到如下图结果。
在“监视”窗口中添加表达式“/t PspReadyBitmap”,以二进制格式查看就绪位图变量的值,此时就绪位图的值为100000001,表示优先级为8 和0 的两个就绪队列中存在就绪线程。
在“快速监视”对话框的“表达式”中输入表达式“*PspCurrentThread”,查看当前正在运行的线程(即被中断的线程)的线程控制块中各个域的值。
通过以上调试线程调度函数PspSelectNextThread 的执行过程,“rr”命令新建的第0个线程在执行线程调度时没有被抢先的原因可以归纳为两点:(1) 第0个线程仍然处于“运行”状态;(2) 没有比其优先级更高的处于就绪状态的线程。
实验六 线性系统的稳定性分析一、实验目的1.研究增益K 对系统稳定性的影响。
2.研究时间常数T 对系统稳定性的影响。
二、实验设备1. 信号与系统实验(二) 2.虚拟示波器 三、实验原理本实验是研究三阶系统的稳定性与参数K 和T 的关系。
图6-1为实验系统的方块图。
它的闭环传递函数为K1)S 1)(T S S(T T KR(s)C(s)213+++=图6-1 三阶系统方块图系统的特征方程为T 1T 2T 3S 3+T 3(T 1+T 2)S 2+T 3S+K =0 (1)1.令T 1=0.2S ,T 2=0.1S ,T 3=0.5S ,则上式改写为S 3+15S 2+50S+100K =0应用Routh 稳定数据,求得该系统的临界稳定增益K =7.5。
这就意味着当K>7.5时,系统为不稳定,输出响应呈发散状态;K<7.5,系统稳定,输出响应最终能趋于某一定值;K =7.5时,系统的输出响应呈等幅振荡。
2.若令,K =7.5,T1=0.2S ,T3=0.5S ,改变时间常数T2的大小,观测它对系统稳定性的影响。
由式(1)得0.1T 2S 3+0.5(0.2+T 2)S 2+0.5S+7.5=0排Routh 表: S 3 0.1T 2 0.5 0 S 2 0.5(0.2+T 2) 7.5 0S 1 )T 0.5(0.20.75T )T 0.25(0.2222+-+S 0 7.5 若要系统稳定必须满足 T 2>00.25(0.2+T 2)-0.75T 2>0,解得 T 2<0.11s即 0<T 2<0.11s 时系统才能稳定。
四、实验内容及步骤:1.按K =10,T1=0.2S ,T2=0.05S 和T3=0.5S 的要求,设计相应的实验电路图。
观察并记录该系统的单位阶跃响应曲线。
2.T1=0.2S ,T2=0.1S ,T3=0.5S ,观察并记录K 分别为5、7.5和K =10三种情况下的单位阶跃响应曲线。
UML实验报告UML 实验指导书⽬录实验⼀UML建模基础 (3)实验⼆⽤例图 (4)实验三UML类图 (8)实验四对象图 (10)实验五包图 (11)实验六状态图 (13)实验七活动图 (17)实验⼋时序图与协作图 (18)实验九组件图 (22)实验⼀UML建模基础[实验⽬的和要求]1、熟悉UML建模⼯具Rational Rose的基本菜单及操作。
2、掌握UML的三⼤组成部分及各部分作⽤。
3、掌握UML规则和相关机制。
4、掌握UML的可见性规则和构造型的作⽤。
[实验内容和步骤]1、练习使⽤建模⼯具建⽴各种UML图形,并对图形进⾏相应编辑和修改。
2、认识各种UML关系及可见性符号,并⽤⼯具表⽰出来。
[分析与讨论]1、总结UML在软件⼯程中的作⽤以及使⽤UML建模的必要性。
实验⼆⽤例图[实验⽬的和要求]1、掌握⽤例的概念。
2、掌握UML⽤例图的组成、作⽤以及使⽤场合。
3、掌握⽤例与⽤例之间的各种关系。
4、学习针对具体场景使⽤⽤例图进⾏分析说明的⽅法。
5、掌握⽤例描述的概念和基本结构,以及⽤例描述的作⽤。
[实验内容和步骤]1、什么是⽤例,什么是场景?⽤例和场景之间的关系是怎样的?2、⽤例图中有哪些组成元素?在UML中是如何表⽰的?3、⽤例与⽤例之间的包含关系、扩展关系和泛化关系各代表什么含义?它们之间有何区别?对以上三种关系各举⼀例,画出⽤例图,并进⾏说明。
4、为了满⾜物业中介⾏业的信息化要求,甲公司基于详尽的需求调研与分析,准备研发⼀套符合市场需要的、实⽤的信息管理系统。
主要将实现客户资料信息管理、客户委托(出租、出售、租赁、购买)信息管理、业务线索⽣成与管理、房源状态⾃动更新、权限管理、到期⽤户管理、房源组合查询等功能。
该公司⼩王,通过多次的与潜在客户的交流与沟通,完成了最初的⽤例模型的开发,下是⼀个⽤例模型的局部:修改房源信息⼩李认为该模型不符合“⽤例建模”的思想,存在明显的错误。
请⽤200字以内说明错误所在,并说明应该如何修改。
实验六曝气充氧实验一、实验目的活性污泥法处理过程中曝气设备的作用是使空气、活性污泥和污染物三者充分混合,使活性污泥处于悬浮状态,促使氧气从气相转移到液相,从液相转移到活性污泥上,保证微生物有足够的氧对有机污染物进行氧化降解。
由于氧的供给是保证生化处理过程正常进行的主要因素之一,因而需通过实验测定氧的总传递系数KLa,评价曝气设备的供氧能力和动力效率,为合理的选择曝气设备提供理论依据。
通过本实验希望达到以下目的:1、加深理解曝气充氧机理及影响因素;2、掌握测定曝气设备的氧总传递系数和充氧能力的方法;3、了解各种测试方法和数据整理的方法。
二、实验原理所谓曝气就是人为的通过一些设备,加速向水中传递氧的一种过程。
现行通过曝气方法主要有三种,即鼓风曝气、机械曝气、鼓风机械曝气。
鼓风曝气是将由鼓风机送出的压缩空气通过管道系统送到安装在曝气池池底的空气扩散装置(曝气器),然后以微小气泡的形式逸出,在上升的过程中与混合液接触、扩散,使气泡中氧转移到混合液中支。
机械曝气则是利用安装在水面的叶轮的高速转动,剧烈搅动水面,产生水跃,使液面与空气接触的表面不断更新,使空气中的氧转移到混合液中去。
曝气的机理可用若干传质理论来加以解释,但水处理界比较公认的是刘易斯(Lewis)于怀特曼(Whitman)创建的双膜理论。
双膜理论是基于在气液两相界面存在着两层膜(气膜和液膜)的物理模型。
它的内容是:在气液两相接触界面两侧存在着气膜和液膜,它们处于层流状态,气体分子从气相主体以分子扩散的方式经过气膜和液膜进入液相主题,氧转移的动力为气膜中的氧分压梯度和液膜中的氧的浓度梯度,传递的阻力存在于气膜和液膜中,而且主要存在于液膜中。
如图所示:氧扩散方向P C P液相主体 气相主体 P C气 G 膜双膜理论模型影响氧转移的因素主要有温度、污水性质、氧分压、水的紊流成都、气液之间接触时间和面积等。
氧转移的基本方程式为()C C K dtdcS La -= V X A D K f L La /•=式中dtdc——液相主体中氧转移速度[mg/(l ·min)] Cs ——液膜处报和溶解氧浓度(mg/L ) C ——液相主体中溶解氧浓度(mg/L ) K La ——为氧总转移系数D L ——氧分子在液膜中的扩散系数 A ——气液两相接触界面面积(m 2) X f ——液膜厚度(m ) V ——曝气液体容积(L )由于液膜厚度X f 及两相接触界面面积很难确定,因而用氧总转移系数K La 值代替。
UML建模课程实验三、UML状态图、活动图模型的设计班级:信息0702 组别:指导老师:徐凯波姓名:王姗学号:2007030331205一、实验要求:掌握利用UML建模工具建立状态图和活动图的方法。
二、实验内容:利用UML建模工具设计状态图和活动图三、实验环境:Windows 2000 Professional以上环境、Rational Rose2003、Sybase Power Designer 10四、操作步骤:(一)状态图(二)活动图五、遇到的问题和解决方法:状态图:学生登陆选课系统进行选课,每个学生每个学期最多只能选3门课,如果学生选课没有达到3门课,就可以进行选课,但学生选课如果达到了3门,则选课失败,不能进行选课。
活动图:管理员再添加课程时,根据本学期实际情况设定课程人数的下限于上限,统计每门课程的选课人数,如果本门课程低于设定的下限,则删除此课程,如果选课人数高于设定的上限,则此门课可则不能再选。
在画活动图的时候,我犯了一个致命的错误,就是没有画泳道,泳道是老师在课堂上反复强调的内容,但在实际操作中,依然这方面出错,这说明老师课上反复强调的东西是多么的重要,还有就是一定要将课堂与实际相联系,才能将知识真正的掌握。
六、实验心得和体会:通过这学期的UML课程,我最大的感触解释做任何事情都要端正态度,在刚上徐老师课的时候,总觉得许老师要求的过严,后来才知道,老师的要求是有根据的,许老师是希望我们通过这一学期的课程真正的掌握UML的知识,学有所用,在画活动图的时候,我已经习惯了先自己动脑去想,真是做不下去的时候,才向老师、同学询问,通过仔细全过程的认真思考,我掌握了关于UML一些制图的方法,可是只掌握这些还是远远不够的,徐老师说够,RationalRose软件还能做许多与编程有关的东西,我们所学习的只是一些皮毛而已,我会继续学习这个软件的,不会的难点,还会想徐老师请教!。
实验六再定序缓冲(ROB)工作原理6.1 实验目的1.加深对指令级并行性及其开发的理解;2.加深对基于硬件的前瞻执行的理解;3.掌握ROB在流出、执行、写结果、确认4个阶段所进行的操作;4.掌握ROB缓冲器的结构;5.给定被执行代码片段,对于具体某个时钟周期,能写出保留站、ROB以及浮点寄存器状态表内容的变化情况。
6.2 实验平台再定序缓冲ROB模拟器,《计算机系统结构实践教程》附书光盘中提供,清华大学出版社。
设计:张晨曦教授(xzhang2000@),版权所有。
开发:刘璐。
6.3 实验内容及步骤首先要掌握ROB模拟器的使用方法。
(见6.4节)1. 假设浮点功能部件的延迟时间为:加法2个时钟周期,乘法10个时钟周期,除法40个时钟周期。
(1)对于下面的代码段,给出当指令MUL.D即将确认时保留站、ROB以及浮点寄存器状态表的内容。
L.D F6, 34(R2)L.D F2, 45(R3)MUL.D F0, F2, F4SUB.D F8, F6, F2DIV.D F10, F0, F6ADD.D F6, F8, F2(2)按步进方式执行上述代码,利用模拟器的“小三角按钮”的对比显示功能,观察每一个时钟周期前后保留站、ROB以及浮点寄存器状态表的内容的变化情况。
2. 对于与上面相同的延迟时间和代码段,(1)给出在第5个时钟周期时,保留站的内容;(2)步进10个时钟周期,ROB的内容有哪些变化;(3)再步进10个时钟周期,给出这时保留站、ROB以及浮点寄存器状态表的内容。
3. 假设浮点功能部件的延迟时间为:加减法3个时钟周期,乘法8个时钟周期,除法40个时钟周期。
自己编写一段程序(要在实验报告中给出),重复上述2的工作。
6.4 ROB模拟器的使用方法1.设置指令和参数本模拟器最多可以模拟10条指令。
可以在“指令”区选择和设置所要的指令。
“指令”区如图6.1所示。
图6.1 “指令”区你可以从下拉框中选择指令,供选择的指令有以下5种:(1)L.D指令:从主存读取一个双精度浮点数;(2)ADD.D:双精度浮点加法指令;(3)SUB.D:双精度浮点减法指令;(4)MULT.D:双精度浮点乘法指令;(5)DIV.D:双精度浮点除法指令。
实验六状态图
[实验目的和要求]
1、掌握状态的定义和组成部分。
2、掌握UML中状态的表示方法。
3、掌握转换的定义及转换的5要素。
4、了解触发事件、监护条件、动作的定义。
5、掌握阅读和绘制状态图的方法。
[实验环境]
1、Windows操作系统(XP、Vista等)
2、Rational Rose2003软件(或RSA8.0)
[实验内容和步骤]
1、说出下面状态图所表达的信息。
2、说出下面状态图所表达的信息,并指出蓝色部分代表的含义。
3、根据下面状态图回答问题。
、
GFloor
UP
entry/ CloseDoor
do/ E
exit/ motor.stop()
WaitingForFloorNum
entry/ openDoor
Return
entry/ closeDoor
do/ motor.moveDown()
exit/ F
Dow n
entry/ closeDoor
do/ D
exit/ motor.stop()
goToFloor(n) arrive()
arrive()
request(floor,direction)[ floor>0 ]
request(floor,direction)[ floor==0 ]
timeout[ getNextFloor()> A ]
B[ C ]
timeout[ getNextFloor()==-1&¤tFloor==0 ] /
closeDoor
arrive()
上图是一个表示电梯系统的状态图,该系统中Controller类和Motor类的详细定义如下图所示:
根据类图,完成上面
状态图中
A,B,C,D,E,F处的内
容。
GFloor
UP
entry/ Close Door do/ motormoveUP()entry/ motorStop
Waiting of floorNum
entry/ open door
Down
entry/ close door do/ motormove down exit/ motor stop()
Return
entry/ close door do/ motormove down exit/ motor stop()
arrive
timeout[ get next floor()==1&¤t floor==0/close door ]
requet( floor,drection )
go to floor(n)
arrive
arrive
timeout[ get next floor()>0 ]
requet(floor,drection)(floor==0)
timeout[ get next floor()<n ]
4、 某销售POS 机工作流程如下:当客户到收银台后,收银员逐一
输入用户购买的商品,然后计算总金额,等待用户付款,确定支付成功之后,完成收银,等待下一个用户。
请为其画出对应的状态图。
收银台
计算金额
等待用户付款
完成收银
下一个用
户
收银员逐一输入用户购买的商品完成
完成
完成
确定支付成功
用户追加商品
支付失败
[分析与讨论]
1、 讨论思考状态图在UML 建模中可以起到什么样的作用。
状态图是用来描述对象,子系统,系统的生命周期,通过状态图可以了解一个对象所能达到的所有状态,以及对象收到的事件对对象状态的影响。
2、 思考什么样的情况下适合引入状态图进行建模。
状态图用于显示状态机(它指定对象所在的状态序列)、使对象达到这些状态的事件和条件、以及达到这些状态时所发生的操作。