PWM控制技术
- 格式:docx
- 大小:191.07 KB
- 文档页数:20
四种pwm控制技术的原理
PWM(Pulse Width Modulation,脉宽调制)是一种常用的数字控制技术,用于实现模拟信号的精确控制。
它通过改变信号的脉冲宽度来控制信号的平均电压或电流。
下面是四种常见的PWM控制技术及其原理:
1. 占空比控制:占空比是PWM信号高电平与周期之比。
通过改变占空比可以控制输出信号的平均电压或电流。
占空比越大,输出信号的平均电压或电流越大;占空比越小,输出信号的平均电压或电流越小。
这种方法简单易行,适用于许多应用场合。
2. 脉冲数改变:这种方法通过改变PWM信号每个周期中的脉冲数来控制输出信号的平均电压或电流。
脉冲数越多,输出信号的平均电压或电流越大;脉冲数越少,输出信号的平均电压或电流越小。
脉冲数改变时,周期保持不变。
这种方法常用于需要精确控制输出信号的平均电压或电流的应用。
3. 频率调制:这种方法通过改变PWM信号的频率来控制输出信号的平均电压或电流。
频率越高,输出信号的平均电压或电流越大;频率越低,输出信号的平均电压或电流越小。
输出的平均功率受频率的影响最小,可以实现高效的能量转换。
频率调制一般使用较高的固定占空比。
4. 相位移控制:这种方法通过改变PWM信号相位来控制输出信号的平均电压或电流。
相位移正比于输出信号的平均电压或电流。
相位移控制可以实现交流电源的电压或电流控制,广泛应用于电网有功功率控制和无功功率控制。
这四种PWM控制技术可以根据具体应用的需要选择合适的方式,以实现对输出信号的精确控制。
PWM控制技术的原理和程序设计PWM(Pulse Width Modulation)控制技术是一种通过改变方波脉冲的宽度来控制电路或设备的技术。
它通常被用于控制电机的速度、电子设备的亮度调节、音频的合成以及电源的调整等应用中。
PWM控制技术的原理是基于调制的整个周期中,方波的高电平时间(即脉冲宽度)与频率的比例关系来实现对电路或设备的控制。
当脉冲宽度为周期的一定比例时,控制电路或设备会按照一定的方式响应,例如电机运动的速度或电子设备的亮度。
1.初始化控制器:首先需要初始化控制器,包括选择合适的计时器和设置计时器的频率,以及将相关引脚配置为PWM输出。
2.设置频率与分辨率:根据实际需求设置PWM的频率和分辨率。
频率决定了周期的长度,而分辨率决定了脉冲宽度的精度。
3.计算脉冲宽度:根据需要控制的电路或设备,计算脉冲宽度的值。
这可以通过设定一个数值来代表脉冲宽度的百分比,然后根据设定的分辨率计算出实际的脉冲宽度。
4.控制输出:通过设置计时器的比较匹配值来控制PWM输出。
比较匹配值决定了方波高电平的结束时间,从而决定了脉冲宽度。
5.循环运行:将上述步骤放入一个循环中,不断更新脉冲宽度并输出PWM信号。
这样可以实现对控制电路或设备的持续控制。
需要注意的是,在实际的 PWM 程序设计中,还需要考虑到不同平台和编程语言之间的差异。
例如,在 Arduino 平台上,可以使用`analogWrite(`函数来实现 PWM 输出;而在其他平台上,可能需要使用特定的库或编程接口来控制 PWM 输出。
总结起来,PWM控制技术的原理是通过改变方波脉冲的宽度来控制电路或设备。
程序设计中,需要初始化控制器、设置频率和分辨率、计算脉冲宽度、控制输出,并将这些步骤放入一个循环中。
这样就可以实现对电路或设备的持续控制。
简述pwm控制技术原理
脉宽调制(PWM)是一种常用的电子控制技术,通过调节信号的占空比来控制输出信号的平均功率。
PWM控制技术常用于电力电子、自动控制、通信等领域。
PWM控制技术的原理如下:
1. 基本原理:PWM控制技术基于周期性的高电平(ON)和低电平(OFF)信号。
在一个固定的时间周期内,通过改变高电平和低电平信号的持续时间比例(即占空比),可以实现对输出信号的平均功率的调节。
2. 信号生成:PWM控制技术需要产生一个周期性的方波信号作为控制信号。
可以使用定时器或计数器来生成这个周期性的信号,根据设定的频率来确定每个周期的时间长度。
3. 调节占空比:在每个周期内,通过改变高电平信号的持续时间来调节占空比。
占空比定义为高电平信号的持续时间与一个周期的总时间之比。
例如,一个占空比为50%的PWM信号表示高电平和低电平信号的时间相等。
4. 输出控制:PWM信号经过一个滤波器,将高频的方波信号转换为模拟信号。
根据PWM 信号的占空比,滤波器输出的模拟信号的平均值相应地调节。
通过控制占空比,可以实现对输出信号的电压、电流或功率进行精确的控制。
PWM控制技术的优点包括高效性、精确性和可靠性。
由于输出信号是由开关器件的开关状态决定的,因此可以快速响应和调节输出信号。
PWM技术广泛应用于电机控制、LED调光、电源变换器等领域,以实现精确的控制和节能的效果。
功率电子系统中的PWM控制技术功率电子系统中的PWM控制技术是一种广泛应用于电力电子变换器中的调节技术,通过改变脉冲宽度模拟模拟信号的幅值,从而实现对输出电压和电流的精确控制。
PWM控制技术在各种功率电子设备中都有重要的应用,例如交流调直流电源、逆变器、电机驱动器等。
本文将着重介绍功率电子系统中的PWM控制技术的原理、特点以及在实际应用中的优势。
首先,PWM控制技术的原理是通过不同占空比的脉冲信号来控制开关器件的导通时间,从而调节输出电压和电流。
采用PWM控制技术可以实现高效率的电能转换,减小能量损耗,提高系统的稳定性和可靠性。
此外,PWM控制技术还可以实现对电压、电流的精确控制,满足不同负载条件下的需求。
因此,PWM控制技术在功率电子系统中具有重要意义。
其次,PWM控制技术具有多种特点,例如控制精度高、响应速度快、可靠性强、具有较高的效率等。
由于PWM控制技术可以根据实际需要更改脉冲信号的占空比,因此可以实现对输出电压和电流的精确控制。
同时,PWM控制技术的响应速度非常快,可以在瞬时内对系统进行调节,提高系统的动态性能。
此外,PWM 控制技术采用数字控制方式,具有较高的稳定性和可靠性,可以实现长时间稳定工作。
最重要的是,PWM控制技术能够有效减小系统的能量损耗,提高整体效率,在功率电子系统中有着广泛的应用。
在实际应用中,PWM控制技术在各种功率电子设备中都有着重要的作用。
比如在交流到直流电源变换器中,PWM控制技术可以实现对输出电压的调整,保证输出电压稳定;在逆变器中,PWM控制技术可以实现对输出电压和频率的精确控制,适用于各种应用场景;在电机驱动器中,PWM控制技术可以实现对电机速度的精确控制,提高系统的动态性能。
此外,PWM控制技术还可以在UPS电源、光伏逆变器、风力发电系统等领域中发挥重要作用,为现代电力系统的稳定运行提供支持。
综上所述,功率电子系统中的PWM控制技术是一种重要的调节技术,具有控制精度高、响应速度快、能量损耗低等优点。
PWM控制技术实现方法综述PWM(Pulse Width Modulation)是一种控制技术,通过调节脉冲的宽度,实现对电路中的电压、电流或功率的精确控制。
在各种应用领域中,PWM技术被广泛应用于电机控制、电源管理、LED调光等方面。
本文将对PWM控制技术的实现方法进行综述。
1. 脉冲宽度调制(Pulse Width Modulation):这是PWM控制技术的基本方法。
通过改变脉冲的宽度来控制输出信号的平均值,进而控制被控对象的电压、电流或功率。
常见的PWM波形包括方波、三角波、锯齿波等,其中方波是最常用的一种波形。
2.单通道PWM:单通道PWM控制技术是最基本的PWM应用方法。
其原理是根据输入控制信号的大小,确定输出波形的高电平时间和低电平时间,通过改变脉冲的宽度来控制输出信号。
单通道PWM适用于需要简单控制的场合,如电机驱动、光源调光等。
3.多通道PWM:多通道PWM控制技术是单通道PWM的拓展,可以同时控制多个通道的PWM信号。
多通道PWM常用于需要同时控制多个电机或多个光源的场合。
多通道PWM可以使用多路开关电路,或者使用专用的PWM控制芯片来实现。
4. 脉冲强度调制(Pulse Amplitude Modulation):脉冲强度调制是一种改变脉冲幅值的PWM方法。
通过改变脉冲的幅值,来改变输出信号的幅值。
脉冲强度调制可以用于实现功率放大器的控制,也可以用于音频信号的调制。
5. 脉冲频率调制(Pulse Frequency Modulation):脉冲频率调制是一种改变脉冲频率的PWM方法。
通过改变脉冲的周期,来改变输出信号的频率。
脉冲频率调制可以用于实现频率变换器,也可以用于音频信号的调制。
6.硬件实现:PWM控制技术可以通过硬件电路实现。
常见的硬件实现方法包括使用计数器、比较器、锁相环等电路来产生PWM信号。
硬件实现的优点是响应速度快、精度高,适用于对控制性能要求较高的场合。
7.软件实现:PWM控制技术也可以通过软件来实现。
pwm控制原理
PWM(脉宽调制)是一种常用的控制技术,可以通过调节信号的脉冲宽度来控制电子设备的输出功率,其原理如下:
PWM的基本原理是通过改变信号的占空比来控制输出电压或电流的大小。
占空比是指脉冲高电平时间与一个周期的比值,通常用百分比表示。
在PWM控制的过程中,输入信号会被分为固定的多个周期,在每个周期内,根据设定的占空比来决定脉冲的高电平时间和低电平时间。
当占空比较大时,脉冲的高电平时间相对较长,输出电压或电流较大;当占空比较小时,脉冲的高电平时间相对较短,输出电压或电流较小。
PWM控制可以实现对输出信号的精确控制,具有输出功率调节范围广、开关损耗小、控制精度高等优点。
在电子设备中,尤其是电机控制领域,PWM控制被广泛应用。
在实际应用中,PWM控制需要通过微控制器或专用的PWM 控制芯片来实现。
这些控制器会根据外部输入的控制信号或算法,计算出对应的占空比,并产生相应的PWM信号。
PWM 信号经过功率放大电路放大后,驱动输出设备,实现对输出功率的调节。
需要注意的是,PWM控制的频率和占空比需要根据被控制设备的特性和需求进行合理选取。
频率较高可以减小输出的脉冲波形,提高控制精度;占空比较大可以获得更高的输出功率,
但也会增加开关损耗。
因此,在具体应用中,需要综合考虑设备特性、效率要求等因素,进行合理的PWM参数设计。
第6章PWM控制技术主要内容:PWM控制的基本原理、控制方式与PWM波形的生成方法,PWM逆变电路的谐波分析,PWM整流电路。
重点:PWM控制的基本原理、控制方式与PWM波形的生成方法。
难点:PWM波形的生成方法,PWM逆变电路的谐波分析。
基本要求:掌握PWM控制的基本原理、控制方式与PWM波形的生成方法,了解PWM 逆变电路的谐波分析,了解跟踪型PWM逆变电路,了解PWM整流电路。
PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
第3、4章已涉及这方面内容: 第3章:直流斩波电路采用,第4章有两处:4.1节斩控式交流调压电路,4.4节矩阵式变频电路。
本章内容PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM 控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
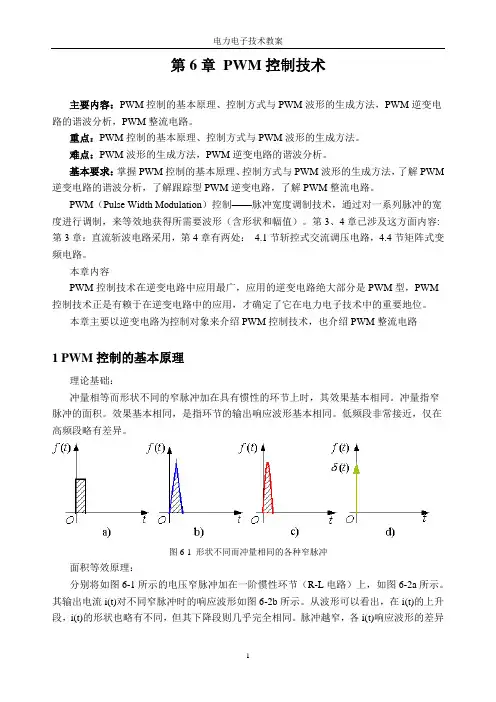
本章主要以逆变电路为控制对象来介绍PWM控制技术,也介绍PWM整流电路1 PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图6-1 形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图6-1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图6-2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图6-2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图6-2 冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
变频器的PWM控制技术变频器是一种能够改变交流电电源的频率,从而控制电机转速的电力设备。
变频器广泛应用于工业、农业和家庭等各个领域。
在变频器控制电机转速的过程中,PWM控制技术是一种广泛采用的方式。
本文将重点介绍PWM控制技术是如何在变频器中被运用的,以及PWM控制技术的原理、优点和局限性。
一、PWM控制技术在变频器中的应用PWM控制技术是指通过对开关管进行控制,将输入电压分为若干份,控制输出脉冲的宽度及频率,从而改变平均输出电压的一种控制技术。
在变频器系统中,PWM控制技术被应用于直流侧的晶闸管逆变器驱动单元,将直流电能转换为交流电能。
变频器的PWM控制技术能够使得输出的电压波形接近正弦波、减小谐波失真率和电机噪声,从而提高变频器的效率和性能。
PWM控制技术还可以实现变频器对电机的电磁势、电压和电流的全面控制,提高控制系统的可靠性和稳定性。
二、PWM控制技术的原理PWM控制技术的原理是,通过改变开关管导通的时间,控制输出电压的有效值。
在PWM控制技术中,开关管的导通时间被分成一个基本周期,根据控制系统的要求,将基本周期分成若干个等分的时间片,即时序脉冲。
PWM控制方法将时序脉冲的宽度作为控制参数,用以控制输出电压的有效值,从而控制电机的运行状态。
PWM控制技术的输出脉冲和正弦波之间的关系可以通过图1表示。
图1:PWM控制技术的输出脉冲和正弦波之间的关系三、PWM控制技术的优点1.控制性能好PWM控制技术可以根据电机的负载实时调整输出电压的大小,从而达到更好的控制效果,能够满足各种控制系统的需求。
2.效率高PWM控制技术能够将变频器输出的波形近似正弦波,减少失真,提高电机的效率,从而降低电能的损耗。
3.控制精度高PWM控制技术可以实现与电机负载无关的精准控制,能够保持电机的稳定运转。
4.使用寿命长PWM控制技术可以降低电机的噪声和振动,减少机械疲劳,从而延长电机的使用寿命。
四、PWM控制技术的局限性1.调制方式单一PWM调制方式仅能调整输出电压的有效值,不能调整电压的相位,因此无法实现电机的同步启动。
SVPWM控制技术PWM控制技术就是对脉冲宽度进行调制的技术,通过对一系列脉冲宽度进行调制来等效获得所需要的波形(包括形状和幅值)。
PWM控制的基本原理:冲量(窄脉冲的面积)相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果(输出响应波形)基本相同,即面积等效原理;用一系列幅值相等,宽度按一定规律变化的高频脉冲序列代替期望的输出波形,多用于逆变电路的控制;PWM信号生成的方法有:计算法、调制法、跟踪法,主要对调制法进行详解调制法:把希望输出的波形作为调制波,把接收调制的信号作为载波,通过信号波的调制得到所期望的PWM波形。
如典型逆变电路:DC-AC,期望逆变后的电压波形为频率50Hz,幅值为直流电压Ud的正弦波,采用PWM控制技术,调制波选为频率为50Hz的正弦波,等腰三角形为载波,用正弦波和载波的交点控制逆变电路四个全控性器件(IGBT)的通断,实现用一系列幅值相等,宽度按所期望的正弦波规律变化的高频脉冲,来等效代替所期望逆变输出的正弦交流电压波形。
上图为典型的单相桥式PWM逆变电路(单极性PWM控制),调制信号为正弦波Ur,载波Uc选为在正弦波正半周为正极性的三角波,在正弦波负半周为负极性的三角波,用正弦波Ur和载波Uc的交点控制IGBT的通断。
在正弦波Ur的正半周,VT1保持导通,VT2保持断态,当正弦波Ur大于载波Uc使VT4导通,VT3关断,输出电压为直流电压Uo=Ud(默认负载两端的电压自左向右为正)正弦波Ur小于载波Uc时,VT4关断,VT3导通,输出电压Uo=0;在正弦波Ur的负半周,VT1保持断态,VT2保持通态,当正弦波Ur小于载波Uc时,VT3导通,VT4关断,输出电压为Uo=-Ud;当正弦波Ur大于载波Uc时,VT3关断,VT4导通,输出电压Uo = 0。
通过控制四个IGBT的通断,得到的输出电压为幅值为Ud,宽度按正弦波规律变化的脉冲序列,用这样的高频脉冲序列来代替我们期望输出的正弦波电压,就是SPWM控制技术。
主要内容:PWM 控制的基本原理、控制方式与 PWM 波形的生成方法,PW 逆 变电路的谐波分析,PW 整流电路。
重点:PWM 控制的基本原理、控制方式与PWM 波形的生成方法。
难点:PWM 波形的生成方法,PWM e 变电路的谐波分析。
基本要求:掌握PW 控制的基本原理、控制方式与 PW 波形的生成方法,了 解PWM 逆变电路的谐波分析,了解跟踪型 PWM K 变电路,了解PWM6流电路。
PWM(Pulse Width Modulation )控制——脉冲宽度调制技术,通过对一系 列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
第 章已涉及这方面内容 : 第 3 章:直流斩波电路采用,第 4 章有两处: 节斩控式交流调压电路, 式变频电路。
本章内容PWMI 制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM 控制技术正是有赖于在逆变电路中的应用, 重要地位。
本章主要以逆变电路为控制对象来介绍 PW 控制技术,也介绍PWM S 流电路1 PWM 控制的基本原理理论基础: 冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同, 是指环节的输出响应波形基本相同。
低频 段非常接近,仅在高频段略有差异。
图 6-1 形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图 6-1 所示的电压窄脉冲加在一阶惯性环节( R-L 电路)上,如图 6-2a 所示。
其输出电流 i(t) 对不同窄脉冲时的响应波形如图 6-2b 所示。
从波形 可以看出,在 i(t) 的上升段, i(t) 的形状也略有不同,但其下降段则几乎完全 相同。
脉冲越窄,各 i(t) 响应波形的差异也越小。
如果周期性地施加上述脉冲, 则响应 i(t) 也是周期性的。
用傅里叶级数分解后将可看出,各 i(t) 在低频段的 特性将非常接近,仅在高频段有所不同。
3、4节矩阵PWI 型,才确定了它在电力电子技术中的<0b)图6-2冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N 等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽, 中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPW 波形一一脉冲宽度按正弦规律变化而和正弦波等效的 PWM 波形。
图6-3用PWM 波代替正弦半波要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
等幅PW 波和不等幅PW 波:由直流电源产生的PWM 波通常是等幅PW 波,如直流斩波电路及本章主要介 绍的PWM e 变电路,节的PWM6流电路。
输入电源是交流,得到不等幅 PWM 波, 如节讲述的斩控式交流调压电路,节的矩阵式变频电路。
基于面积等效原理,本 质是相同的。
PWM fe 流波:电流型逆变电路进行PW 控制,得到的就是PWM fe 流波。
PWM 波形可等效的各种波形: 直流斩波电路:等效直流波形SPW 波:等效正弦波形,还可以等效成其他所需波形,如等效所需非正弦交 流波形等,其基本原理和 SPWI 控制相同,也基于等效面积原理。
2 PWM 逆变电路及其控制方法目前中小功率的逆变电路几乎都采用 PW 技术。
逆变电路是PWM 控制技术最为重要的应用a)<0场合。
本节内容构成了本章的主体PWM逆变电路也可分为电压型和电流型两种,目前实用的几乎都是电压型。
(1)计算法和调制法1、计算法根据正弦波频率、幅值和半周期脉冲数,准确计算PWM波各脉冲宽度和间隔,据此控制逆变电路开关器件的通断,就可得到所需 PWM波形。
缺点:繁琐,当输出正弦波的频率、幅值或相位变化时,结果都要变化2、调制法输出波形作调制信号,进行调制得到期望的 PWM波;通常采用等腰三角波或锯齿波作为载波;等腰三角波应用最多,其任一点水平宽度和高度成线性关系且左右对称;与任一平缓变化的调制信号波相交,在交点控制器件通断,就得宽度正比于信号波幅值的脉冲,符合 PW 啲要求。
调制信号波为正弦波时,得到的就是 SPW波;调制信号不是正弦波,而是其他所需波形时,也能得到等效的 PWM波。
结合IGBT单相桥式电压型逆变电路对调制法进行说明:设负载为阻感负载,工作时V和V2通断互补,V3和V4通断也互补。
控制规律:u o正半周,V i通,V2断,V3和V4交替通断,负载电流比电压滞后,在电压正半周,电流有一段为正,一段为负,负载电流为正区间,V和V4导通时,U o等于U d,V4关断时,负载电流通过 V i和V D3续流,u o=0,负载电流为负区间,i o为负,实际上从V DI 和V D4流过,仍有U o=U, V4断,V3通后,i o从V3和V Dl续流,U o=0, U o 总可得到U d和零两种电平。
U o负半周,让匕保持通,V l保持断,V3和V4交替通断,U o可得-U d和零两种电单极性PW控制方式(单相桥逆变):在U r和U c的交点时刻控制IGBT的通断。
U r正半周,V保持通,V2保持断,当U r>U c时使V4通,V3断,U o=U,当U r VU c时使V4断,V3通,U o=0。
U r负半周,V l 保持断,V2保持通,当U r VU c时使V3通,V4断,U o=-U d,当U r>U c时使W断,M通, U o=0,图6-5单极性PWM控制方式波形双极性PW控制方式(单相桥逆变):在U r半个周期内,三角波载波有正有负,所得PWM波也有正有负。
在U r—周期内,输出PWM波只有±U d两种电平,仍在调制信号U r和载波信号U c的交点控制器件通断。
U r正负半周,对各开关器件的控制规律相同,当U r >U c时,给V和V4导通信号,给V2和V3关断信号,女口 i o>0, Vi和V4通,如i o V0, V DI和V4通,U o=U d, 当U r VU c时,给V2和V3导通信号,给V i和V4关断信号,如i o V0, V2和V3通,如i o>0, V2和V3通,U o=-U d。
波形见图6-6。
单相桥式电路既可采取单极性调制,也可采用双极性调制。
图6-6双极性PWM控制方式波形双极性PW控制方式(三相桥逆变):见图 6-7。
三相PW控制公用U c,三相的调制信号U rU、U rV和U rW依次相差120°。
U相的控制规律:当U rU>U c时,给V导通信号,给V4关断信号,U uN = L d/2,当U rU<U c时,给V4 导通信号,给V关断信号,U uN=-U d/2 ;当给V1(V4)加导通信号时,可能是WV” 导通,也可能是V D1(V D4)导通。
U UN、图6-7三相桥式PWM型逆变电路U VN和U WN的PW波形只有±卩d/2两种电平,U UV波形可由U uN-U VN得出,当1和6 通时,U uV=U,当3和4通时,U uV=— U d,当1和3或4和6通时,U uV=0。
波形见图 6-8。
输出线电压PW波由±U d和0三种电平构成,负载相电压PW波由(±2/3)U d、 (± 1/3)U d 和0共5种电平组成。
图6-8三相桥式PWM逆变电路波形防直通死区时间:同一相上下两臂的驱动信号互补,为防止上下臂直通造成短路,留一小段上下臂都施加关断信号的死区时间。
死区时间的长短主要由器件关断时间决定。
死区时间会给输出PWM波带来影响,使其稍稍偏离正弦波。
特定谐波消去法(Selected Harmonic Elimination PWM — SHEPWM)计算法中一种较有代表性的方法,图 6-9。
输出电压半周期内,器件通、断 各3次(不包括0和n),共6个开关时刻可控。
为减少谐波并简化控制,要 尽量使波形对称。
首先,为消除偶次谐波,使波形正负两半周期镜对称,即:(6-2)四分之一周期对称波形,用傅里叶级数表示为:(6-3) (6-4)式中n=1,3,5,… 确定a 1的值,再令两个不同的a n =0,就可建三个方程,消去两种特定频率的谐波:在三相对称电路的线电压中,相电压所含的 3次谐波相互抵消,可考虑消去5次和7次谐波,得如下联立方程:2U a 1 --- (1 2 cos 1 2 cos 22 cos 3)u( t) u( t )(6-1)图6-9特定谐波消去法的输出 PWM 波形 其次,为消除谐波中余弦项,使波形在半周期内前后 线对称。
1/4周期以n /2为轴u( t) u(t)u( t)a n 1,3,5 ,...sin n t式中,a n 为a n"u( t)sin n td t、丿a i 、图6-9,能独立控制 4「a 1U d .a n —[ — sin n a 2和a 3共3个时刻。
该波形的 U d . —sin n 2a n 为tda 2( a1t)d t a3U d . + 八——Sin n td 2 2U d (1 2 cos n na 2a 3U^sin2n t)dt]2 cos n 2 2 cos n求得 a i 、a 2和a 3。
(6-5)给定a i , 一般,在输出电压半周期内器件通、断各 k 次,考虑PW 波四分之一周期对 称,k 个开关时刻可控,除用一个控制基波幅值,可消去 k-1个频率的特定谐 波,k 越大,开关时刻的计算越复杂。
除计算法和调制法外,还有跟踪控制方法,在节介绍(2) 异步调制和同步调制载波比一一载波频率f c 与调制信号频率f r 之比,N= f c / f ro 根据载波和信 号波是否同步及载波比的变化情况,PW 碉制方式分为异步调制和同步调制:1、 异步调制y异步调制一一载波信号和调制信号不同步的调制方式。
通常保持f c 固定不变,当f r 变化时,载波比N 是变化的。
在信号波的半周期 内,PW 波的脉冲个数不固定,相位也不固定,正负半周期的脉冲不对称,半周 期内前后1/4周期的脉冲也不对称。
当f r 较低时,N 较大,一周期内脉冲数较多, 脉冲不对称的不利影响都较小,当f r 增高时,N 减小,一周期内的脉冲数减少, PWM 脉冲不对称的影响就变大。
因此,在采用异步调制方式时,希望采用较高的 载波频率,以使在信号波频率较咼时仍能保持较大的载波比。
2、 同步调制同步调制一一N 等于常数,并在变频时使载波和信号波保持同步。
基本同步调制方式,f r 变化时N 不变,信号波一周期内输出脉冲数固定。
三 相,公用一个三角波载波,且取N 为3的整数倍,使三相输出对称。
为使一相的 PWM 波正负半周镜对称,N 应取奇数。
当N=9时的同步调制三相PW 波形如图6-10 所示。