第2章PDPS软件基本操作
- 格式:pdf
- 大小:841.85 KB
- 文档页数:18


PDPS软件:碰撞检测功能介绍与使⽤⽅法概述碰撞检测是机器⼈⽣产线虚拟仿真过程中必不可少的⼀个步骤,通过碰撞检测,可以在机器⼈运动过程中动态检测与之发⽣碰撞⼲涉的设备,这样就可以对设计⽅案提出修改与优化建议,做到提前预知、规避设计风险。
⼤多数的机器⼈虚拟仿真软件都具有⾃动碰撞检测的功能,⽐如DELMIA软件中的“Clash”命令,Robotstudio软件中的“碰撞监控”功能等。
Process Simulate软件中也同样提供了这样的功能,本期就来为⼤家介绍⼀下这个功能的使⽤⽅法。
碰撞查看器窗⼝介绍Process Simulate软件中,机器⼈碰撞检测功能是在Collision Viewer(碰撞查看器)窗⼝中实现的,默认情况下Collision Viewer窗⼝已经打开,可以直接查看。
若是CollisionViewer窗⼝未打开,可以在软件“Home”菜单栏下,“Viewers”按钮的下拉菜单中点击“Collision Viewer”,Collision Viewer窗⼝将会显⽰在软件⼯作区的最下⽅。
Collision Viewer窗⼝由三个功能区域组成,以下分别详细介绍。
左侧功能区域主要⽤于创建和管理碰撞检测集合。
中间功能区域显⽰碰撞检测结果,并包含碰撞结果查看操作选项。
其中,主碰撞对象碰撞检测结果以红⾊显⽰,与之发⽣碰撞的对象以蓝⾊显⽰。
右侧功能区域显⽰所选碰撞的碰撞曲线,每条曲线以其碰撞对象命名。
创建碰撞检测集合在进⾏碰撞检测之前,要先创建碰撞检测集合。
Collision Viewer窗⼝中左侧功能区域中点击“New Collision Set”命令按钮,弹出Collision Set Editor对话框。
在Collision SetEditor对话框中可以设置待检测的碰撞对象,其中Check列表⽤于添加待碰撞检测的主对象,With列表⽤于添加与主碰撞检测对象存在碰撞可能性的对象。
对于机器⼈点焊⼯艺仿真,⼀般情况下主碰撞检测对象设置为点焊焊枪、机器⼈,碰撞对象设置为⼯装夹具等周边设备。
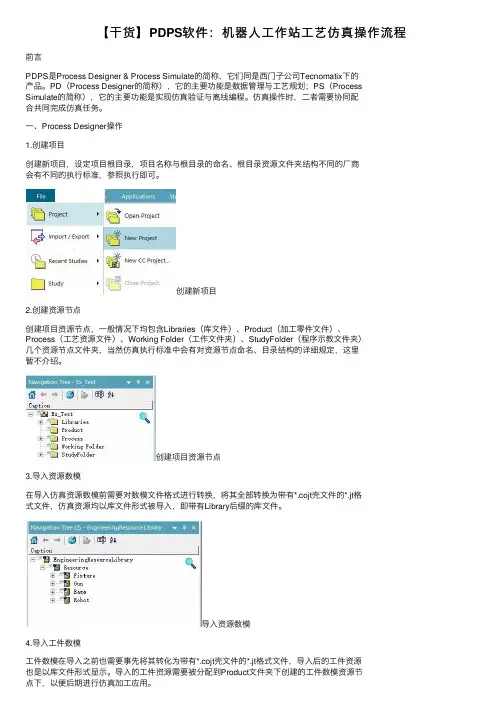
【⼲货】PDPS软件:机器⼈⼯作站⼯艺仿真操作流程前⾔PDPS是Process Designer & Process Simulate的简称,它们同是西门⼦公司Tecnomatix下的产品。
PD(Process Designer的简称),它的主要功能是数据管理与⼯艺规划;PS(Process Simulate的简称),它的主要功能是实现仿真验证与离线编程。
仿真操作时,⼆者需要协同配合共同完成仿真任务。
⼀、Process Designer操作1.创建项⽬创建新项⽬,设定项⽬根⽬录,项⽬名称与根⽬录的命名、根⽬录资源⽂件夹结构不同的⼚商会有不同的执⾏标准,参照执⾏即可。
创建新项⽬2.创建资源节点创建项⽬资源节点,⼀般情况下均包含Libraries(库⽂件)、Product(加⼯零件⽂件)、Process(⼯艺资源⽂件)、Working Folder(⼯作⽂件夹)、StudyFolder(程序⽰教⽂件夹)⼏个资源节点⽂件夹,当然仿真执⾏标准中会有对资源节点命名、⽬录结构的详细规定,这⾥暂不介绍。
创建项⽬资源节点3.导⼊资源数模在导⼊仿真资源数模前需要对数模⽂件格式进⾏转换,将其全部转换为带有*.cojt壳⽂件的*.jt格式⽂件,仿真资源均以库⽂件形式被导⼊,即带有Library后缀的库⽂件。
导⼊资源数模4.导⼊⼯件数模⼯件数模在导⼊之前也需要事先将其转化为带有*.cojt壳⽂件的*.jt格式⽂件,导⼊后的⼯件资源也是以库⽂件形式显⽰。
导⼊的⼯件资源需要被分配到Product⽂件夹下创建的⼯件数模资源节点下,以便后期进⾏仿真加⼯应⽤。
导⼊⼯件数模5.导⼊焊点数据PD中机器⼈焊点信息通常需要从外部导⼊,⽀持导⼊的数据⽂件格式包括:*.xml、*.ppd、*.csv。
其中,*.csv格式机器⼈焊点⽂件制作⽅法之前为⼤家介绍过了,这⾥不再赘述。
导⼊的机器⼈焊点数据同样以库⽂件形式显⽰,使⽤是需要将其投影到焊接板件上。
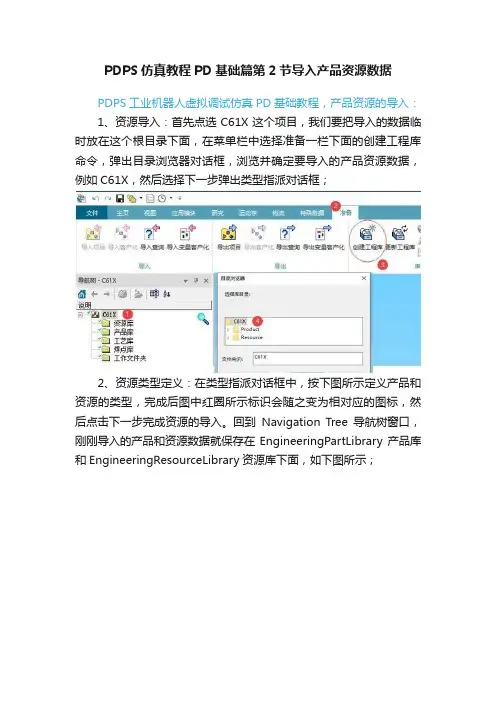
PDPS仿真教程PD基础篇第2节导入产品资源数据PDPS工业机器人虚拟调试仿真PD基础教程,产品资源的导入:1、资源导入:首先点选C61X这个项目,我们要把导入的数据临时放在这个根目录下面,在菜单栏中选择准备一栏下面的创建工程库命令,弹出目录浏览器对话框,浏览并确定要导入的产品资源数据,例如C61X,然后选择下一步弹出类型指派对话框;2、资源类型定义:在类型指派对话框中,按下图所示定义产品和资源的类型,完成后图中红圈所示标识会随之变为相对应的图标,然后点击下一步完成资源的导入。
回到Navigation Tree导航树窗口,刚刚导入的产品和资源数据就保存在EngineeringPartLibrary产品库和EngineeringResourceLibrary资源库下面,如下图所示;3、选中刚导入的产品库和资源库按住鼠标左键,拖拽到资源目录下面,然后选择EngineeringPartLibrary,点击鼠标右键,选择NavigationTree,在新的窗口中打开产品库并展开,可以看到此产品库中所有的零件,如下图所示;4、查看产品属性:选中任意一个零件,点击鼠标右键,选择Properties,打开属性窗口,在属性的常规栏中,我们可以查看并修改零件的名称、编号,添加标注。
在属性的Physical物理栏中,可以查看并修改零件的2D和3D文件路径、材料、重量、尺寸以及零件的预览图等信息;5、当产品资源导入成功后,本地文件夹目录下会多出xml文件,此文件记录了在导入过程中产品资源所定义的类型,若需重新导入定义产品资源类型需将此xml文件删除,若需替换更新产品资源,可直接用新jt文件替换此目录下的jt文件(新的jt文件名称需改为当前目录下jt文件名称);6、导入焊点:选择C61X,点击鼠标右键展开菜单列表,然后选择Import Object命令,选择焊点文件导入(格式为csv),导入成功后将MfgLibrary文件拖到焊点库下面,其他的文件删除,如下图所示;以上就是PD软件中产品、资源、焊点的导入过程以及操作步骤。

PDPS软件:机器人点焊工艺仿真项目创建与资源导入从本期开始正式进入机器人工艺仿真的学习学习阶段,我们将按照上一篇发布的机器人工作站工艺仿真流程一步一步的学习下去,希望能给热爱工业机器人行业,并且对虚拟仿真有兴趣的同仁带来帮助,首先介绍Process Designer软件中的相关操作。
一、资源文件目录创建在进行仿真之前首先要创建仿真资源文件目录,各大汽车厂商对机器人仿真的资源文件目录均有自己的标准,仿真人员只需按照标准执行即可。
由于我们是教学演示,因此就不参考任何一家仿真标准了,这里就按照常规的资源文件分类方法进行资源文件目录创建了。
二、项目创建1.打开Process Designer软件,在“File”菜单的下拉菜单中依次点选“Project”→“New Project”,然后在弹出的New Project 对话框中输入新项目名称,如Ex_01,点击OK按钮。
2.此时在左侧的Navigation Tree项目树下创建了Ex_01项目资源目录,新项目创建完成。
三、项目资源目录创建1.左侧项目树中点选项目资源目录,然后在“Home”菜单下点击“New”命令按钮,在弹出的New对话框中勾选“Collection”,在其后的Amount下输入5,点击OK按钮。
2.左侧项目树的Ex_01项目目录下创建了5个资源文件夹,点选其中一个资源文件夹,然后按“F2”键,可重命名资源文件名称。
依次将5个资源文件命名为Libraries、Product、Process、Working Folder、StudyFolder,项目资源目录创建完成。
注:真实的项目资源目录需要按照汽车厂商提供的项目资源目录创建标准进行创建。
四、导入资源数模1.进行资源数模导入之前首先需要设置系统资源文件目录,软件工作区中任意位置右击鼠标,在弹出的快捷菜单中点击“Options”或直接按“F6”键,在打开的Options对话框中点选“eMServer”属性标签,然后在其下的System Root、End Items Creation Folder、Images、Movies下选择创建的资源文件根目录,点击确定按钮。

引言:在当今社会,人们对于个人发展和技能提升的需求越来越强烈。
尤其是在专业岗位上,PD(ProductDevelopment)和PS (ProjectManagement)技能的培养成为了不可或缺的一部分。
本文是PDPS培训教程(二),旨在帮助读者系统地了解和学习PD和PS 技能,以提升个人竞争力。
概述:本教程将分为五个大点进行详细阐述。
第一大点将介绍PD和PS的概念及其在现代企业中的重要性。
第二大点将深入剖析PD的关键步骤和方法。
第三大点将重点探讨PS的项目管理流程和方法。
第四大点将介绍PD和PS的融合应用,以及如何将两者有效地结合起来。
最后一大点将总结本教程,并给出进一步学习PD和PS的建议。
正文内容:一、PD和PS的概念及重要性1.1PD的定义和目标1.2PS的定义和目标1.3PD和PS在企业中的重要性1.4PD和PS的关系及其互补性1.5PD和PS对个人发展的价值二、PD的关键步骤和方法2.1产品需求调研和分析2.2产品规划和设计2.3产品开发和测试2.4产品发布和营销2.5产品改进和升级三、PS的项目管理流程和方法3.1项目范围定义和目标设定3.2项目资源和进度计划3.3项目团队管理和沟通3.4项目风险评估与控制3.5项目执行和监控四、PD和PS的融合应用4.1PD和PS的共同点及优势4.2PD和PS的协同方法和工具4.3PD和PS的关键成功因素4.4PD和PS的案例分析4.5PD和PS的未来发展趋势五、总结与建议5.1本教程的主要观点和总结5.2进一步学习PD和PS的建议5.3PD和PS在个人职业发展中的应用前景5.4PD和PS对个人素质的要求5.5PD和PS对企业的价值和作用结论:本文针对PDPS培训教程(二),从概念和重要性、关键步骤和方法、项目管理流程和方法、融合应用以及总结与建议等五个大点进行了详细阐述。
通过本教程的学习,读者将能够更好地了解并掌握PD和PS技能,提升个人竞争力,并在实践中运用PD和PS的知识与方法,为企业的产品开发和项目管理作出积极贡献。
PDPS机器人虚拟调试--PS篇第二课焊点投影和零件分身创建1、打开Process Simulate中的Operation Tree操作树,展开OP10工位,可以看到所有14个焊点全部暗色显示;2、任何焊点必须经过向零件投影之后才可以使用焊枪进行焊接仿真,选中OP10,然后选择窗口上方菜单栏的工艺——>Project Weld Points投影焊点;3、上侧是焊点,中间是焊点投影的对应零件,选择Project,开始投影(投影时零件必须是显示状态);4、点击Project项目后,弹出对话框如下图,点击是;5、投影之后的焊点右侧出现绿色的对勾,表示投影完成,选择Close退出;6、完成投影的焊点在操作树中图标变亮,焊点也随之变成了坐标的形式;7、重复以上步骤,投影OP20焊点(此时所有的焊点都变为坐标形式),若之前PD中焊点分配错误,此处可以进行调整,直接拖动即可;8、焊点投影完成后进行零件分身的创建以及装配,为了便于观察,我们先将零件的颜色进行修改,选中零件、选择建模、设置建模范围,弹出对话框,选择确定(建模过程中需将PD关闭,以免零件被PD打开占用,PS中无法进行建模;9、展开所选零件,选择其目录下所有文件,右键修改颜色;10、选中刚刚修改颜色的零件,点击结束建模,完成颜色修改;11、接下来进行零件分身的创建(若一个项目中零件需要被多次使用,则需要创建分身,反之,则不需要),选中JIG1_1,选择工具栏上的工艺、Multiple Part Appearance多零件外观;12、弹出多零件窗口,选中窗口中的JIG1_1(图中1位置),然后点击选择操作按钮(图中2位置),最后选择操作树中的OP10,点击对号;13、此时多零件外观窗口中操作下面将显示OP10,然后将其设为主要板件,即在图中主下面打勾,由否变为是(设置为主要板件后,焊点将随着创建的分身一起移动);14、重复以上步骤完成其他分身的创建,创建完成后如下图所示会在外观一栏显示所创建的所有分身;15、将所有资源显示出来,选中分身JIG1_1_ap_1,点击重定位按钮,打开重定位窗口;16、如下图选择选取原点按钮(图中1位置),然后选择零件需要安装的夹具(图中2位置),最后点击应用(图中3位置),板件将安装到夹具,焊点也随着零件分身一起移动;17、重复以上步骤,完成其余操作,点击保存。