单片机控制系统汇编程序
- 格式:doc
- 大小:36.00 KB
- 文档页数:3
单片机汇编语言程序设计在当今高科技时代,单片机有着广泛的应用领域,它是一种微型电脑系统,具有集成度高、功耗低等优点。
而单片机汇编语言程序设计则是单片机开发中最基础、最重要的一环。
本文将从基础概念、程序设计流程以及实例分析等方面,全面介绍单片机汇编语言程序设计。
一、基础概念1. 单片机单片机是一种集成度非常高的微型电脑系统,它由微处理器、内存、输入输出设备以及时钟电路等部分组成。
它的主要特点是片内集成度高,体积小,功耗低。
2. 汇编语言汇编语言是一种与机器语言一一对应的低级编程语言,它是用助记符、伪指令和机器指令等表示的,比机器语言更容易理解和编写。
3. 程序设计在单片机领域,程序设计是指利用汇编语言编写单片机程序的过程,目的是为了实现特定的功能。
程序设计需要包括程序编写、调试和优化等环节。
二、程序设计流程1. 确定需求在开始编写程序之前,首先需要明确需求。
根据需要实现的功能,确定程序设计的目标和要求。
2. 构思设计根据需求,进行程序的构思设计。
确定程序的结构,拟定算法和流程图,为后续的编码工作做好准备。
3. 编写代码在进行编写代码之前,需要先熟悉单片机的指令集和编程规范。
然后,根据构思设计的结果,使用汇编语言编写程序代码。
4. 调试测试编写完成代码后,需要进行调试测试。
通过单步执行、布点断点等方式,检查程序是否存在错误,是否能够正确运行。
5. 优化改进在经过测试后,根据实际情况进行优化改进。
可以通过优化算法、减少冗余代码等方式,提高程序的执行效率和稳定性。
6. 文档记录最后,需要对程序进行文档记录。
包括程序的说明、使用方法、注意事项等,方便后续的维护和升级。
三、实例分析以LED 点亮为例,演示单片机汇编语言程序设计的实际操作步骤。
1. 硬件连接将单片机与 LED 灯连接,以 STM32F103C8T6 开发板为例,连接方式如下:- 将 LED 的长脚连接至单片机的 GPIOA.0 引脚。
- 将 LED 的短脚连接至单片机的 GND 引脚。
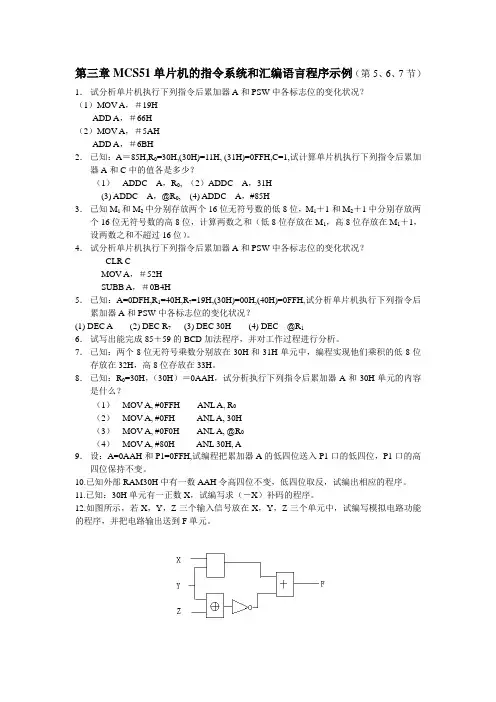
第三章MCS51单片机的指令系统和汇编语言程序示例(第5、6、7节)1.试分析单片机执行下列指令后累加器A和PSW中各标志位的变化状况?(1)MOV A,#19HADD A,#66H(2)MOV A,#5AHADD A,#6BH2.已知:A=85H,R0=30H,(30H)=11H, (31H)=0FFH,C=1,试计算单片机执行下列指令后累加器A和C中的值各是多少?(1)ADDC A,R0, (2)ADDC A,31H(3) ADDC A,@R0, (4) ADDC A,#85H3.已知M1和M2中分别存放两个16位无符号数的低8位,M1+1和M2+1中分别存放两个16位无符号数的高8位,计算两数之和(低8位存放在M1,高8位存放在M1+1,设两数之和不超过16位)。
4.试分析单片机执行下列指令后累加器A和PSW中各标志位的变化状况?CLR CMOV A,#52HSUBB A,#0B4H5.已知:A=0DFH,R1=40H,R7=19H,(30H)=00H,(40H)=0FFH,试分析单片机执行下列指令后累加器A和PSW中各标志位的变化状况?(1) DEC A (2) DEC R7 (3) DEC 30H (4) DEC @R16.试写出能完成85+59的BCD加法程序,并对工作过程进行分析。
7.已知:两个8位无符号乘数分别放在30H和31H单元中,编程实现他们乘积的低8位存放在32H,高8位存放在33H。
8.已知:R0=30H,(30H)=0AAH,试分析执行下列指令后累加器A和30H单元的内容是什么?(1)MOV A, #0FFH ANL A, R0(2)MOV A, #0FH ANL A, 30H(3)MOV A, #0F0H ANL A, @R0(4)MOV A, #80H ANL 30H, A9.设:A=0AAH和P1=0FFH,试编程把累加器A的低四位送入P1口的低四位,P1口的高四位保持不变。
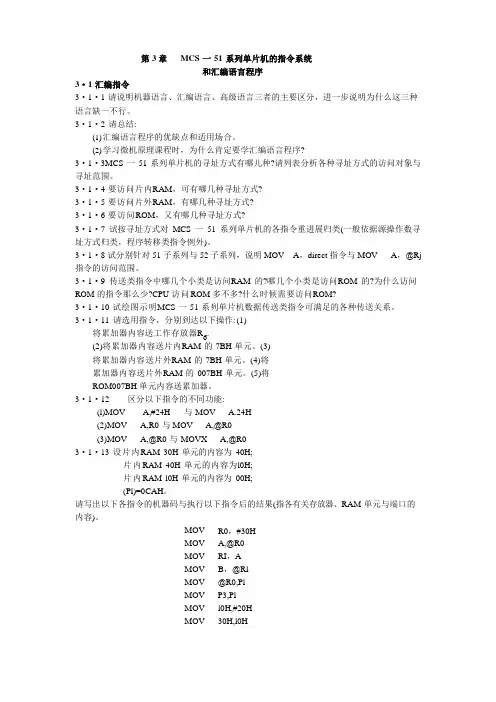
3·1 汇编指令第3 章MCS 一51 系列单片机的指令系统和汇编语言程序3·1·1 请说明机器语言、汇编语言、高级语言三者的主要区分,进一步说明为什么这三种语言缺一不行。
3·1·2 请总结:(1)汇编语言程序的优缺点和适用场合。
(2)学习微机原理课程时,为什么肯定要学汇编语言程序?3·1·3MCS 一51 系列单片机的寻址方式有哪儿种?请列表分析各种寻址方式的访问对象与寻址范围。
3·1·4 要访问片内RAM,可有哪几种寻址方式?3·1·5 要访问片外RAM,有哪几种寻址方式?3·1·6 要访问ROM,又有哪几种寻址方式?3·1·7 试按寻址方式对MCS 一51 系列单片机的各指令重进展归类(一般依据源操作数寻址方式归类,程序转移类指令例外)。
3·1·8 试分别针对51 子系列与52 子系列,说明MOV A,direct 指令与MOV A,@Rj 指令的访问范围。
3·1·9 传送类指令中哪几个小类是访问RAM 的?哪几个小类是访问ROM 的?为什么访问ROM 的指令那么少?CPU 访问ROM 多不多?什么时候需要访问ROM?3·1·10 试绘图示明MCS 一51 系列单片机数据传送类指令可满足的各种传送关系。
3·1·11 请选用指令,分别到达以下操作: (1)将累加器内容送工作存放器R6.(2)将累加器内容送片内RAM 的7BH 单元。
(3)将累加器内容送片外RAM 的7BH 单元。
(4)将累加器内容送片外RAM 的007BH 单元。
(5)将ROM007BH 单元内容送累加器。
3·1·12 区分以下指令的不同功能:(l)MOV A,#24H 与MOV A.24H(2)MOV A,R0 与MOV A,@R0(3)MOV A,@R0 与MOVX A,@R03·1·13 设片内RAM 30H 单元的内容为40H;片内RAM 40H 单元的内容为l0H;片内RAM l0H 单元的内容为00H;(Pl)=0CAH。
单片机汇编语言设计实例详解引言:单片机是嵌入式系统中常见的控制器,它具有体积小、功耗低、成本低等特点,被广泛应用于家电、汽车、工业控制等领域。
而汇编语言作为单片机的底层语言,直接操作硬件资源,具有高效性和灵活性。
本文将以一个实例,详细讲解如何使用单片机汇编语言进行设计。
实例背景:假设我们要设计一个温度检测系统,要求实时监测环境温度,并在温度超过某个阈值时触发报警。
硬件准备:1. 单片机:我们选择一款常用的8051单片机作为例子。
2. 温度传感器:我们选择一款数字温度传感器,它可以通过串行通信与单片机进行数据交互。
3. 显示屏:为了方便实时显示温度信息,我们选用一款数码管显示屏。
软件准备:1. Keil C51:这是一款常用的单片机开发软件,支持汇编语言的编写和调试。
2. 串口调试助手:用于测试串口通信功能。
设计步骤:1. 硬件连接:将单片机与温度传感器、显示屏连接起来。
注意接线的正确性和稳定性。
2. 编写初始化程序:使用汇编语言编写单片机的初始化程序,包括端口初始化、中断向量表设置、定时器初始化等。
3. 串口通信设置:通过串口与温度传感器进行数据交互,需要设置串口通信的波特率、数据位数、停止位等参数。
4. 温度检测程序:编写汇编语言程序,实时读取温度传感器的数据,并将数据送至显示屏进行显示。
5. 温度报警程序:在温度超过设定阈值时,触发报警程序,可以通过蜂鸣器等外设发出警报信号。
6. 调试与测试:使用Keil C51进行程序调试,通过串口调试助手测试串口通信和温度显示、报警功能。
设计思路:1. 初始化程序设计:先设置端口的输入输出方向,再设置中断向量表,最后初始化定时器。
这样可以确保程序的稳定性和可靠性。
2. 串口通信设置:根据温度传感器的通信协议,设置串口的波特率、数据位数、停止位等参数。
注意要与传感器的通信规范保持一致。
3. 温度检测程序设计:通过串口读取温度传感器的数据,并进行相应的处理。
单片机教案汇编语言程序设计一、引言单片机是一种小型集成电路芯片,具有独立完成特定任务的能力。
而汇编语言是一种低级程序设计语言,能够直接操作硬件资源。
本教案旨在介绍单片机的程序设计,重点讲解汇编语言的基本概念和编程技巧,帮助学习者掌握单片机的应用。
二、单片机基础知识在开始学习汇编语言程序设计之前,需要对单片机的基础知识有所了解。
主要包括单片机的结构、寄存器的作用、IO口的应用等内容。
通过对这些基础知识的学习,能够更好地理解汇编语言的工作原理和编程思路。
三、汇编语言概述汇编语言是一种使用助记符来表示机器指令的低级程序设计语言。
相对于其他高级语言,汇编语言更接近硬件层面,可直接操控单片机的寄存器和IO口。
本节将介绍汇编语言的基本概念、语法规则和常用指令集,帮助学习者熟悉汇编语言的编写方式。
四、单片机编程环境搭建在进行汇编语言程序设计前,需要搭建相应的开发环境。
常用的单片机开发工具包括Keil、IAR等。
本节将以Keil为例,介绍如何配置和使用开发工具,以及如何将程序下载到单片机中进行调试。
五、第一个汇编程序本节将以一个简单的LED闪烁程序为例,介绍如何使用汇编语言编写单片机程序。
通过对程序的分析和调试,学习者能够理解汇编语言的基本结构和编程过程,并且能够独立完成简单的单片机程序设计。
六、汇编语言编程技巧除了掌握基本的汇编语言知识外,还需要掌握一些编程技巧,以提高程序的效率和稳定性。
本节将介绍一些常用的汇编语言编程技巧,包括循环、条件判断、子程序调用等,帮助学习者编写更加复杂和实用的单片机程序。
七、实例分析本节将通过几个实例,分析并介绍实际应用中的单片机程序设计方法。
例如,如何控制电机的转动方向和速度、如何读取温湿度传感器的数据等。
通过这些实例的分析,学习者能够将所学的知识应用到实际项目中,并且能够更好地理解和解决实际问题。
八、实验设计在本教案的最后,将提供几个实验项目作为实践环节,帮助学习者巩固所学的知识和技能。
MCS51单片机指令系统与汇编语言程序设计MCS-51是一种非常常见的8位单片机系列,该系列包括了多种型号的单片机,如Intel 8051、8031、8052等。
MCS-51单片机指令系统是一组用于驱动该系列单片机的指令集,汇编语言程序设计是利用这些指令来编写程序。
MCS-51单片机指令系统包含了多种指令,可以执行诸如数据传输、算术逻辑运算、控制和数据访问等功能。
这些指令通过各种不同的寻址模式来操作数据,包括立即寻址、寄存器寻址、直接寻址、间接寻址和寄存器间接寻址等。
不同的寻址模式和指令组合可以实现不同的功能。
汇编语言程序设计通过将人类可读的汇编指令翻译成机器可执行的二进制指令来编写程序。
在MCS-51单片机中,汇编指令由操作码和操作数组成。
操作码指定了所执行的操作,如数据传输、算术运算或控制指令。
操作数则指定了指令要操作的数据。
下面以一个简单的例子来说明MCS-51单片机指令系统和汇编语言程序设计的基本原理。
假设我们要编写一个程序,将两个寄存器中的数据相加,并将结果存储到第三个寄存器中。
首先,我们需要将第一个寄存器的值加载到累加器A中,这可以通过MOV指令实现。
MOV指令的操作码为01,操作数为两个寄存器的地址。
例如,MOVA,R0将R0的值加载到A中。
接下来,我们需要将第二个寄存器的值加载到B寄存器中,同样可以使用MOV指令。
MOVB,R1将R1的值加载到B中。
然后,我们可以使用ADD指令将A和B中的值相加,并将结果存储到A中。
ADD指令的操作码为04,操作数为A的地址。
例如,ADDA将累加器中的值与A寄存器中的值相加,并将结果存储到A中。
最后,我们可以使用MOV指令将A中的结果移动到第三个寄存器中,例如,MOVR2,A将A的值移动到R2中。
通过组合使用这些指令,我们可以实现将两个寄存器中的值相加并存储到第三个寄存器中的功能。
总结来说,MCS-51单片机指令系统和汇编语言程序设计是一种用于编程控制该系列单片机的方式。
单片机控制流水灯程序汇编语言随着科技的发展和微电子技术的迅猛进步,单片机逐渐成为智能系统与设备中不可或缺的组成部分。
而流水灯作为最基础的应用之一,不仅在学习过程中具有重要意义,同时也在实际工程中发挥着重要作用。
本文将介绍如何使用汇编语言编写单片机控制流水灯程序,并详细讲解其运行原理和实现方法。
一、流水灯原理流水灯是一种由多个LED组成的灯条或灯链,在按照一定次序依次点亮和熄灭的灯光效果。
其原理基于单片机通过控制输出口的电平高低来控制LED的亮灭状态,实现灯光的变化和移动效果。
二、程序设计方法1. 初始化设置在编写流水灯程序之前,我们首先要了解单片机的相应接口和寄存器的使用方法。
在程序开始时,需要进行相应的初始化设置,包括将数据方向寄存器和端口寄存器设置为输出,并将初始值赋予输出口电平。
例如,对于51单片机,可以使用以下汇编语言代码进行初始化设置:MOV P1, #00H ;将P1端口的输出电平置为低电平MOV P1M1, #FFH ;将P1端口的数据方向设置为输出MOV P1M0, #00H2. 主程序在流水灯程序中,需要编写主程序来实现流水灯的效果。
主程序中使用循环结构控制LED的亮灭状态和移动效果。
例如,以下是一个简单的汇编语言代码,实现了由4个LED组成的流水灯的效果:MOV R0, #F0H ;初始亮灭状态MOV R1, #00H ;初始LED位置LOOP: ;循环MOV P1, R0 ;将亮灭状态赋予P1端口的输出电平ACALL DELAY ;延时,形成流水灯效果MOV A, R1SUBB A, #01H ;将LED位置减一MOV R1, AJZ CHANGE ;当LED位置为零时,改变亮灭状态MOV R0, R0SJMP LOOP ;继续循环CHANGE: ;改变亮灭状态CPL R0 ;对亮灭状态进行取反操作SJMP LOOP ;继续循环3. 延时函数为了实现流水灯的移动效果,需要设置一个合适的延时时间来控制LED的亮灭速度。
51单片机汇编程序1. 简介51单片机是一种常用的8位单片机芯片,具有广泛的应用领域。
51单片机的编程语言主要有汇编语言、C语言和底层汇编语言。
本文主要介绍51单片机的汇编程序。
2. 汇编程序基础2.1 寄存器51单片机的CPU有4个8位寄存器(A、B、DPTR、PSW)和一个16位寄存器(PC)。
在汇编程序中,我们可以使用这些寄存器来进行各种操作。
•A寄存器(累加器):用于存储数据和进行算术运算。
•B寄存器:辅助寄存器,可用于存储数据和进行算术运算。
•DPTR寄存器:数据指针寄存器,用于存储数据存取的地址。
•PSW寄存器:程序状态字寄存器,用于存储程序运行状态信息。
•PC寄存器:程序计数器,用于存储当前执行指令的地址。
2.2 指令集51单片机的指令集包含了多种汇编指令,可以用来进行数据操作、算术运算、逻辑运算、控制流程等。
常用的汇编指令有:•MOV:数据传送指令。
•ADD、SUB:加法和减法运算指令。
•ANL、ORL、XRL:逻辑运算指令。
•MOVX:外部RAM的读写指令。
•CJNE、DJNZ:条件分支指令。
•LCALL、RET:函数调用和返回指令。
2.3 编写一个简单的汇编程序下面是一个简单的汇编程序示例,用于将A寄存器中的数据加1,并将结果存储到B寄存器中。
ORG 0x0000 ; 程序的起始地址MOV A, #0x01 ; 将A寄存器赋值为1ADD A, #0x01 ; 将A寄存器加1MOV B, A ; 将A寄存器的值传送到B寄存器END ; 程序结束在上面的示例中,ORG指令用于指定程序的起始地址,MOV 指令用于将A寄存器赋值为1,ADD指令用于将A寄存器加1,MOV指令用于将A寄存器的值传送到B寄存器,END指令用于标记程序结束。
3. 汇编语言的应用51单片机的汇编语言广泛应用于各种嵌入式系统中,包括智能家居、工业自动化、仪器仪表等领域。
汇编程序具有以下特点:•程序执行效率高:由于汇编语言直接操作硬件,可以精确控制程序的执行流程,提高程序的执行效率。
51单片机电机控制输入速度七段数码管
显示汇编程序
简介
本文档介绍了使用51单片机控制电机的方法,以及如何通过输入设置速度,并使用七段数码管显示相关信息的汇编程序。
电机控制
在使用51单片机控制电机之前,需要连接合适的电机驱动模块,并将其与单片机进行连接。
通过控制电机驱动模块的引脚,可以实现电机的正转、反转、停止等功能。
输入速度
可以通过外部的输入设备(如按键、旋钮等)来设置电机的速度。
通过读取输入设备的状态,可以在程序中动态地调整电机的速度。
七段数码管显示
可以通过七段数码管来显示相关信息,如电机的速度、转速等。
通过控制七段数码管的引脚,可以实现在数码管上显示相应的数字
或字符。
汇编程序
使用51汇编语言编写程序,通过设置相应的控制寄存器和引
脚状态,可以实现电机的控制和数码管的显示。
汇编程序需要包括
以下几个方面的功能:
- 初始化相关引脚和寄存器
- 读取输入设备的状态
- 根据输入设备的状态设置电机的速度
- 控制电机的正转、反转、停止等操作
- 更新七段数码管显示的内容
总结
本文档介绍了51单片机控制电机的方法,以及通过输入设备
设置速度和使用七段数码管显示信息的汇编程序。
通过合理地编写
汇编程序,可以实现电机的精确控制和相关信息的显示。
以上是本文档的大致内容,希望对您有所帮助。
; step motor control
; ASM for MCS51
mode equ 082h
contrl equ 08003h
ctl equ 08000h ;8255接口芯片PA口的地址值
Astep equ 01h ;对A相通电,PA口的赋值
Bstep equ 02h ;对B相通电,PA口的赋值
Cstep equ 04h ;对C相通电,PA口的赋值
Dstep equ 08h ;对D相通电,PA口的赋值
dly_c equ 10h ;启动初值(加速度)寄存器
sd1 equ 80 ;0--255 加速度初值:值越小,加速越快
sd2 equ 40 ;<sd1 最快速度,值越小速度越快,但受DELAY的内循环限制延时子程序外循环初值
sd3 equ 60 ;0--255 延时子程序内循环初值,数值越大速度越小
org 0h
step: ;系统初始化
mov a,#mode ;8255工作模式:控制字
mov dptr,#contrl ;8255控制寄存器
movx @dptr,a
mov dptr,#8002h ;对8002h送00h值
mov a,#0
movx @dptr,a
mov dly_c,#sd1 ;送加速度初值:值越小,加速越快
jmp loop2 ;跳转不同的控制方式:loop--单双8拍
;loop1--双4拍,loop2--单4拍
;单/双八拍工作方式
loop:
mov dptr, #ctl ;送PA口的地址到DPTR
mov a,#astep+bstep ;D相通电
movx @dptr,a
call delay
mov a,#astep ;D相\A相通电
movx @dptr,a
call delay ;调用延时子程序
mov a,#dstep+astep ;A相通电
movx @dptr,a
call delay
mov a,#dstep
movx @dptr,a
call delay
mov a,#cstep+dstep
movx @dptr,a
call delay
mov a,#cstep
movx @dptr,a
call delay
mov a,#bstep+cstep
movx @dptr,a
call delay
mov a,#bstep
movx @dptr,a
call delay
mov a, dly_c
dec a ; 提高转速
cjne a,#sd2, nn1 ; 最快速度,值越小速度越快,但受DELAY的内循环限制inc a
nn1: mov dly_c,a
ljmp Loop1
; 双四拍工作方式
loop1:
mov dptr,#ctl
mov a, #dStep+astep
movx @dptr,a
call delay
mov a, #cstep+dstep
movx @dptr,a
call delay
mov a, #bstep+cstep
movx @dptr,a
call delay
mov a,#astep+bstep
movx @dptr,a
call delay
mov a, dly_c
dec a
cjne a,#sd2, nn2
inc a
nn2: mov dly_c,a
jmp loop1
; 单四拍工作方式
loop2:
mov dptr,#ctl
mov a,#dstep
movx @dptr,a
call delay
mov a,#cstep
movx @dptr,a
call delay
mov a,#bstep
movx @dptr,a
call delay
mov a,#astep
movx @dptr,a
call delay
mov a, dly_c
dec a
cjne a,#sd2, nn3
inc a
nn3: mov dly_c,a
jmp loop2
delay: ;延时子程序mov r6,dly_c ;外循环初值dd1:
mov r7,#sd3 ;内循环初值
djnz r7,$ ;内循环
djnz r6,dd1 ;外循环
ret ;子程序返回
end。