采用TMS320F240的运动控制实验平台
- 格式:pdf
- 大小:109.73 KB
- 文档页数:4


机载SAR天线稳定平台的DSP数字控制器设计吕继宇 张绚丽雷宏(北京中国科学院电子学研究所)摘要:机载SAR(airborne Synthetic Aperture Radar,合成孔径雷达)中,用三轴稳定平台隔离载机的姿态变化及机械振动来稳定天线波束指向是关键的运动补偿技术之一。
本文提出用TMS320LF2407 DSP芯片设计机载SAR三轴陀螺稳定平台的数字控制器,介绍了机载SAR 对稳定平台的要求和TMS329LF2407 DSP芯片用于运动控制器设计的优点,给出了控制系统的原理方框图、数学模型和DSP数字控制器结构图。
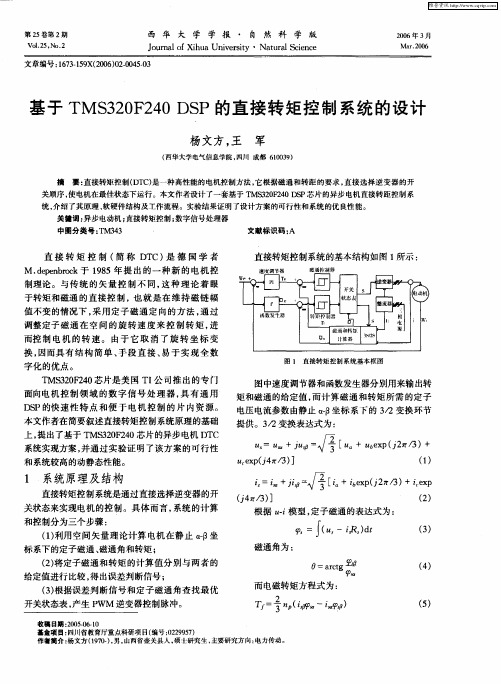
关键词:机载SAR,稳定平台,TMS320LF2407 DSP,数字控制器中图分类号:TN911.72; TN820 文献标识码:ADesign of Based-DSP Digital Controller for Airborne SARAntenna Stabilized Platform(Institute of Electronics, Chinese Academy of Sciences, Beijing, 100080)Lv jiyu , Zhang xuanli, Lei hongAbstract: Three-axis stabilized platform, as a key motion compensation technology for airborne Synthetic Aperture Radar (SAR), is used to isolate attitude variations and mechanical vibration from aircraft, resulting in stable antenna pointing. In this paper design of based-TMS320LF2407 DSP digital controller for airborne SAR antenna three-axis stabilized platform is presented. The requirement of airborne SAR to stabilized platform and the advantages of this DSP used to implement motion controller are described. The theoretic block and mathematic model of the control system as well as the structure of DSP digital controller are given.Keywords: Airborne SAR, Stabilized platform, TMS320LF2407 DSP, Digital controller1引言机载SAR是最早的成像雷达方式,因其受限制条件少,容易实现,灵活性强,容易实验新技术,并能得到及时维护的特点至今仍是研究的热点。

嵌入式系统课程设计题目1.ARM系统在LED显示屏中的应用(利用ARM系统控制彩色LED显示屏)2.ARM-Linux 嵌入式系统在农业大棚中的应用(温度、湿度和二氧化碳浓度是影响棚栽农作物生长的3 大要素。
为了实现农业大棚中这3 种要素数据的远程实时采集,引入了当前嵌入式应用中较为成熟的ARM9 微处理器和Linux 嵌入式操作系统技术, 采用温度传感器PH100TMPA、湿度传感器HM1500 和二氧化碳浓度传感器NAP221A ,设计一种基于TCP/ IP 协议的嵌入式远程实时数据采集系统方案。
从硬件设计和软件实现2方面对该系统进行具体设计。
)3.ARM 嵌入式处理器在智能仪器中的应用(设计一种基于ARM 嵌入式处理器系统的智能仪器的硬件和软件设计方案, 并结合uc/o s2II或者Linux嵌入式实时操作系统, 给出一套完整的任务调度和管理的方法, 最后用实例说明)4.ARM系统在汽车制动性能测试系统中的应用(采用ARM系统构建一个路试法的汽车制动性能测试系统)5.ARM 嵌入式控制器在印染设备监控中的应用(针对拉幅热定型机,设计一种基于485 总线的分布式监控系统。
用ARM 嵌入式控制器实现主、从电机的同步运行和烘房温度的控制;在PC 机上用VB6. 0 设计转速和温度的监控画面;实现ARM、变频器和PC 机之间的数据通信。
)6.基于ARM系统的公交车多功能终端的设计(完成电子收费、报站、GPS定位等功能)7.基于ARM9的双CAN总线通信系统的设计(设计一种基于ARM9内核微处理器的双路CAN总线通信系统。
完成系统的总体结构、部分硬件的设计,系统嵌入式软件的设计,包括启动引导代码U - boot、嵌入式L inux - 操作系统内核、文件系统以及用户应用管理软件四个部分。
)8.基于ARM9 和Linux 的嵌入式打印终端系统(嵌入式平台上的打印终端的外围电路连接设计、嵌入式Linux 的打印机驱动程序开发和应用程序的开发)9.基于ARM 的车载GPS 终端软硬件的研究(重点研究基于ARM 的导航系统的软硬件设计)10.ARM系统在B超系统中的应用(完成系统软件硬件设计,包括外围电路)11.基于ARM 的嵌入式系统在机器人控制系统中应用(提出一种基于ARM、DSP 和arm-linux 的嵌入式机器人控制系统的设计方法, 完成控制系统的功能设计、结构设计、硬件设计、软件设计)12.基于ARM的视频采集系统设计(完成系统软件硬件设计,包括外围电路,采用USB接口的摄像头)13.基于ARM的高空爬壁机器人控制系统(构建一种经济型的爬壁机器人控制平台, 与上位机视觉定位和控制系统结合,使其适用于导航与定位、运动控制策略、多机器人系统体系结构与协作机制等领域。
DSP第二次大作业一、详细描述F240,F2812芯片引脚的符号与功能。
1、TMS320F240芯片引脚与功能TMS320F240为TI公司所出品的定点式数字信号处理器芯片,具有强大的外围(64k I/O space、10 bit A/D Converter、Digital I/O peripheral) ,芯片内部采用了加强型哈佛架构(Enhanced Harvard Architecture),由三个平行处理的总线─程序地址总线(PAB)、数据读出地址总线(DRAB)及数据写入地址总线(DWAB),使其能进入多个内存空间。
由于总线之操作各自独立,因此可同时进入程序及数据存储器空间,而两内存间的数据亦可互相交换,使得其具有快速的运算速度,几乎所有的指令皆可在50ns 周期时间内执行完毕,内部的程控以管线式的方式操作(Pipeline operation),且使用内存映像的方式,使其整体的效能可到达20MIPS,因此非常适用于实时运转控制,而对于速度较慢的外围亦提供了wait-states 的功能。
其引脚及功能如下所示:2、TMS320F2812芯片引脚与功能德州仪器所生产的TMS320F2812 数字讯号处理器是针对数字控制所设计的DSP,整合了DSP 及微控制器的最正确特性,主要使用在嵌入式控制应用,如数字电机控制(digital motor control, DMC)、资料撷取及I/O 控制(data acquisition and control, DAQ)等领域。
针对应用最正确化,并有效缩短产品开发周期,F28x 核心支持全新CCS环境的C compiler,提供C 语言中直接嵌入汇编语言的程序开发介面,可在C语言的环境中搭配汇编语言来撰写程序。
值得一提的是,F28xDSP核心支持特殊的IQ-math 函式库,系统开发人员可以使用廉价的定点数DSP 来开展所需的浮点运算算法。
F28x 系列DSP预计开展至400MHz,目前已开展至150MHz的Flash型式。
文章编号:1006-1576(2002)04-0022-04采用TMS320F240的运动控制实验平台张小平1,王旭2,杨耕2,徐文立2(1. 攀枝花大学电气信息工程系,四川攀枝花 617000;2. 清华大学自动化系,北京 100084)摘要:以TMS320F240数字信号处理器(DSP)为核心的运动控制实验平台,采用三项交-直-交逆变电路和检测电路及相应外围电路构成三项变频器,其上位机使用PC。
变频器与感应电机和电机负载结合,构成了一个完整的交流调速系统。
逆变器的主开关器件,选用智能功率模块(IPM)。
DSP控制器以TMS320F240为核心的SEED-F240 DEMO版为基础开发,包括信号的A/D转换和接口等。
负载使用5K38UN270Q三项感应伺服电机所带磁粉离合器,对称空间矢量脉宽调制波由TMS320F240的通用定时器1与3个全比较单元配合产生,采用M/T法测量转速。
只要遵循该实验平台的接口协议,设计所需控制软件,即可实现其运动控制,并已成功地用于异步电机无速度传感器的矢量控制、直接转矩控制、V/F恒定调速控制等项目。
关键词:运动控制;数字信号处理器;智能功率模块;实验平台中图分类号:TP273.3 文献标识码:AA Motion Control Experimental Platform Based on TMS320F240ZHANG Xiao-ping1, WANG Xu2, YANG Geng2, XU Wen-li2(1. Dept. of Electrical & Information Engineering, Panzhihua University, Panzhihua 617000, China;2. Dept. of Automation, Tsinghua University, Beijing 100084, China)Abstract: TMS320F240-based digital signal processor (DSP) used as the key part of experimental platform for m otion control, PC used as upper computer, three-phase transducer consists of three-phase AC-DC-AC frequency changing circuit, detecting circuit and peripheral circuit. The AC adjusting speed system made up of transducer and induction-motor. Intelligent power module (IPM) was used as main on/off device of transducer. On the basis of TMS320F240-based DSP used as the key part, SEED-F240 DEMO board, signal A/D conversion and interface board was developed. The magnetic powder clutch in 5K38UN270Q three-phase servo induction-motor was applied for loading, the modulating wave for the pulse width of symmetrical space vector was generated by a universal timer in TMS320F240 and 3 comparative cell, the rotate speed was tested with M/T method. If only the control software was designed according as the interface protocol of experimental stage, motion control was realized. The experimental platform for m otion control had been applied in the vector control, torque control and V/F constant speed control of non-speed sensor for asynchronous motor.Key Words: Motion control; Digital signal processor; Intelligent power module; Experimental platform1 概述以数字信号处理器TMS320F240为核心的运动控制实验平台,采用开放式设计,具有良好的扩展性。
由于实验平台的硬件电路、控制软件等技术细节对使用者公开,使用者可以在平台上实施自行设计的控制算法,并对算法中的变量进行实时记录,便于分析、研究及开发。
为了检验实验平台的使用效果,进行了V/F基于异步电机电磁子系统稳定性的算法实验,并给出了实验结果。
2 实验平台的硬件构成实验平台以数字信号处理器(DSP)为控制核心,必要的外围电路、三相交-直-交逆变电路和检测电路,构成三相变频器。
变频器与感应电机和电机负载结合起来,形成了一个完整的交流调速硬件系统。
采用PC机作为变频器的上位机。
如图1所示。
2.1 主电路收稿日期:2001-11-25;修回日期:2002-06-26 作者简介:张小平(1956-),男,四川人,1982年毕业于重庆大学,攀枝花大学电气信息工程系副教授,从事自动检测技术研究。
主电路是一个典型的三相交-直-交电压源型逆变电路。
采用IPM(智能功率模块)作为逆变器的主开关器件,结构简单、外围元件少、可靠性高。
同时,主电路配备了全面的保护措施,即使在控制器工作不正常的情况下,主电路也不易损坏,从而更有效地保证了实验人员的人身安全和设备的安全。
逆变电路的直流侧和输出的交流侧设置了电压、电流检测电路。
图2 主电路原理结构图~①逆变电路运动控制实验平台的逆变电路采用典型的三相电压源型逆变电路,如图2所示。
●智能功率模块(IPM):IPM由高速、低耗的IGBT芯片和驱动电路、保护电路构成。
实验平台采用三菱公司的PM50RSA120,该功率模块可带动7.5kW以下的三相异步电动机。
●光耦隔离:来自控制器的信号经由隔离电路进入IPM。
隔离电路采用高速、高共模抑制比光电耦合器,原惠普公司的HCPL4504组成。
共模抑制比达30kV/μs,传输延迟时间为0.8/0.5μs(典型值)。
任意2片HCPL4504的传输延迟时间差(t PLH-t PHL)为-0.7~1.3μs。
据此,在保证IPM不发生“直通”情况下,可将死区时间尽量减小,同时保证各路PWM信号间严格的相位关系。
HCPL4504片内光发射、接收端之间具有屏蔽层,能够有效地抑制干扰。
●IPM的电源供应:4路控制电源采用各路独立供电,由4个独立的AC-DC变换器产生。
变换器采用集成度高的Harvest电源模块。
●吸收电路:为减小电压尖峰影响,避免叠加后电压超过IGBT耐压值,在IPM输出侧接入由电阻电容和快恢复二极管等组成的吸收电路。
②电压、电流检测电路检测电路采用高线性度的LEM霍尔效应传感器,同时检测输出的3个线电流和2个线电压。
2.2 DSP控制器①TMS320F240[1] [2]TMS320F240系列采用美Texas Instruments 公司器件,它将DSP的高速运算能力和面向电机的高效控制能力集于一体,其主要特征包括:●核心CPU:包含32位的中央算术逻辑单元(CALU)、32位累加器、16位×16位并行乘法器、3个定标移位寄存器和8个16位辅助寄存器。
指令周期为50ns(20MIPS),多数指令为单周期指令。
●存储器:片内带有544字×16位的数据/程序RAM和16K字×16位的掩模ROM或Flash EEPROM。
外部存储器接口具有16位地址总线和16位数据总线,224K字×16位的最大可寻址存储器空间。
●双路10位模数转换器:可实现双路信号同时采样,转换时间可编程设置,最短为6.6μs。
●6个外部中断:电源驱动保护中断、复位、非屏蔽中断NMI和3个可屏蔽中断。
②基于F240-DEMO板的控制器DSP控制器是以SEED F240-DEMO板为基础开发的。
DEMO板以TMS320F240为核心,配合存储器和外围电路,组成F240的基本系统。
板上存储器采用高速静态存储器(SRAM),形成64K字×16位配置,其中32K字为程序存储器,32K字为数据存储器。
DEMO板上带有F240系统扩展所需的各种接口。
I/O接口板主要完成PWM输出驱动、功率器件保护、数字/模拟信号输入和用户接口等任务。
PWM信号由DSP的PWM输出脚引出,由于DSP的输出引脚带负载能力不足以驱动高速光电耦合器,需要加入PWM信号驱动电路。
保护电路采用双重设计。
虽然IPM内部集成了功能完善的保护电路,仍要求在功率器件发生故障信号时撤去驱动信号。
IPM输出的4路故障信号相“或”以后,经低通滤波器,作为DSP功率器件保护信号。
同时,在故障信号有效时关闭送往后级的驱动信号,并持续关闭1分钟。
模拟信号处理部分负责将电压、电流反馈信号转换到DSP A /D 转换器接受的电平范围。
同时,模拟信号处理部分提供片内A /D 转换器所需的工作电源和基准电压。
用户接口包括键盘和液晶显示屏。
键盘控制DSP 控制器的启动、停止,频率设定值的升高和降低。
单行16字符的点阵液晶显示屏用于显示设定值等数据。
这种显示屏字访问速度较慢,与高速的DSP 接口时必须加入等待电路。
等待电路由一片GAL16V8组成,兼具用户接口部分的I /O 地址译码功能。
2.3 电机负载电机采用美国GE 公司的5K38UN270Q 三相感应伺服电机。
额定电压:三相180V /60Hz ;额定转速:1800转/分;额定功率:1kW 。
电机轴端装有BEI Electronics Inc. 的光电码盘:分辨率为2048脉冲/转,具有正交脉冲输出。
电机带动定制的磁粉离合器作为负载。
3 实验平台软件结构[1~4]3.1 控制器软件① PWM 信号的产生[5]空间矢量脉宽调制(SVPWM )是指三相功率变频器6个功率晶体管的一种特殊开关顺序。