CASIO_fx4800P与fx4850P说明书
- 格式:pdf
- 大小:895.15 KB
- 文档页数:20
Casio Fx-4800P计算器测量计算程序抚顺市市政建设(集团)有限公司第一工程处:张和光Casio Fx-4800P一、整机概况Fx-4800P计算器是日本Casio公司的产品,它除了具备函数型计算器的全部功能之外,还具备如下特殊功能:1、二进制和八进制字组显示;2、二进制、八进制、十进制和十六进制的转换和加、减、乘、除运算。
3、进行f(x)函数的输入与积分的计算;4、进行标准差和回归计算。
Fx-4800P计算器具有同时显示运算表达式和计算结果的四行式显示的特点。
该计算器具有记存4500个程序步的记忆储存装置,计算器储存了程序之后,只要您输入数据,再按一下EXE键,计算器就会用数据进行程序执行,对于随数据而变化的反复计算的运用十分方便。
Fx-4800P计算器具备条件指令转移和非条件指令转移的能力,还具备逻辑判断能力,因此它可以进行测量工作中比较复杂的计算,当然其它专业的计算工作也同样可以解决。
(1)Fx-4800P计算器操作方法比较简单、易学,程序编排灵活、易懂,可称之谓各专业技术人员的物美、价廉、得心应手的计算工具。
每一台Fx-4800P计算器都具备一本说明书,该计算器各部键的功能以及操作方法,只要认真按照说明书各章节学习,很快就能掌握和运用,现将我在生产实践中应用的部分计算程序介绍给测绘界的同行以便共同探讨。
(2)二、程序库1.坐标反算:程序步骤:C”X1”:D”Y1”:E”X2”:F”Y2”:Fixm:Pol(E-C ,F-D:I”S1-2=”◢J≤O=>J=J+360△J”A1-2=”操作过程:ZBFS→EXE→输入X1值→EXE→输入Y1值→EXE→输入X2值→EXE→Y2→EXE→EXE→EXES1-2:计算得出的距离;A1-2:计算得出的角度。
(按shift°′″转换为60进制的角度)注:此程序可循环计算。
(3)2.坐标正算:程序步骤:C”X1”:D”Y1”:S”S1-2”:R”A1-2”:Fixm:X”X 2”=C+Rec(S,R◢Y” Y2”=D+J操作过程:ZBZS→EXE→输入X1值→EXE→输入Y1值→EXE→输入S1-2距离→EXE→输入A1-2角度(例125°31′23.25″)→EXE→EXE注:此程序可循环计算。
CASIO fx-4500P与CASIO fx-4800P计算器部分按键及程序语句不同之处比较【坐标反算程序】文件名:ZBFS(调用子程序文件名:Z.FS)L1 Lbl 0L2 {XY}:X″X1″:Y″Y1″:U″X0″:Z″Y0″L3 Prog ″Z.FS″L4 ″DIST=″:D:Pause 0L5 D=0=>Goto 0:◣A″ANGLE=″◢Goto 0使用说明屏幕提示执行操作屏幕显示计算结果X1? 输入视点坐标XDIST= 置镜点与视点的距离Y1? 输入视点坐标YX0? 输入置镜点坐标XANGLE= 置镜点→视点方位角Y0? 输入置镜点坐标Y注意fx-4500P型计算器将L3行改成:Prog Z.FS【坐标正算程序】文件名:ZBZSL1 Lbl 0L2 {DA}:D″DIST″:A″ANGLE″:U″X0″:Z″Y0″L3 ″X=″:X=U+Dcos A:Pause 0L4 Y=Z+Dsin A◢Goto 0使用说明屏幕提示执行操作屏幕显示计算结果DIST? 输入置镜点与视点的距离X= 视点坐标X ANGLE? 输入置镜点→视点方位角X0? 输入置镜点坐标XY= 视点坐标Y Y0? 输入置镜点坐标Y 【转角放样程序】文件名:ZJFY(调用子程序文件名:Z.FS)L1 Lbl 0L2 {STUZ}:X=S″HSX″:Y=T″HSY″:U″X0″:Z″Y0″L3 Prog ″Z.FS″L4 D=0=>Goto 0:◣J=AL5 Lbl 1L6 {XY}:X″QSX″:Y″QSY″L7 Prog ″Z.FS″L8 ″DIST=″:D:Pause 0L9 D=0=>Goto 1:◣A≥J=>A″R-ANGLE″=A-J◢≠=>A″R-ANGLE″=A-J+360◢◣Goto 1使用说明屏幕提示执行操作屏幕显示计算结果HSX? 输入后视点坐标XDIST= 置镜点与前视点距离HSY? 输入后视点坐标YX0? 输入置镜点坐标XY0? 输入置镜点坐标YR-ANGLE=置镜点→后视点到置镜点→前视点的转角QSX? 输入前视点坐标XQSY? 输入前视点坐标Y注意fx-4500P型计算器将L3、L7行改成:Prog Z.FS【单交点基本型(对称、非对称)平曲线要素、中桩、边桩坐标计算程序】文件名:PQXJS(调用子程序文件名:PQXZB)L1 R:H″LS1″:H=0=>I=0:◣I″LS2″:Z:D″JD″:S=Abs Z L2 N=H2÷24R-H^4÷2384R^3L3 P=I2÷24R-I^4÷2384R^3L4 K=H÷2-H^3÷240R2L5 M=I÷2-I^3÷240R2L6 B=H÷2R:C=I÷2RL7 T″T1″=(R+P-(R+N)cos S)÷sin S+K◢U″T2″=(R+N-(R+P)cos S)÷sin S+M◢L=H+I+(Sπ÷180-B-C)R◢H=I=>E=(R+N)÷cos (S÷2)-R◢J=2T-L◢◣N″LY″=L-H-I◢B″ZH″=D-T◢C″HY″=B+H◢E″YH″=C+L-H-I◢F″HZ″=E+I◢G″QZ″=C+N÷2◢Prog ″PQXZB″使用说明屏幕提示执行操作屏幕显示计算结果R? 输入圆曲线半径T1= 小里程段切线长LS1?输入小里程段缓和曲线长(不设缓和曲线时,输入0)T2= 大里程段切线长LS2?输入大里程段缓和曲线长(不设缓和曲线时,不提示)L= 平曲线总长Z? 输入转向角(左转负、右转正) E= 外距(T1=T2时显示)JD? 输入交点桩号J= 校正数(T1=T2时显示)LY= 圆曲线长ZH= 直缓点桩号不设缓和曲线时,ZH=HY,为直圆点桩号HY= 缓圆点桩号YH= 圆缓点桩号不设缓和曲线时,YH=HZ,为圆直点桩号HZ= 缓直点桩号QZ= 曲中点桩号XJD? 输入交点的X坐标XZH= 直缓点X坐标(不设缓和曲线时,为直圆点X坐标)YJD? 输入交点的Y坐标YZH= 直缓点Y坐标(不设缓和曲线时,为直圆点Y坐标)F1? 输入小里程段导线的方位角XHZ= 缓直点X坐标(不设缓和曲线时,为圆直点X坐标)YHZ= 缓直点Y坐标(不设缓和曲线时,为圆直点Y坐标)XHY= 缓圆点X坐标不设缓和曲线时,不显示YHY= 缓圆点Y坐标XYH= 圆缓点X坐标YYH= 圆缓点Y坐标DQD? 输入待求点桩号FWJ= 待求点切线方位角X= 待求点中桩X坐标Y= 待求点中桩Y坐标ZB? 输入左幅宽度XZ= 待求点左幅边桩X坐标YZ= 待求点左幅边桩Y坐标YB? 输入右幅宽度XY= 待求点右幅边桩X坐标YY= 待求点右幅边桩Y坐标注意fx-4500P型计算器将L7行最后一句改成:Prog PQXZB;子程序中Prog ″PQX.F″改成Prog PQX.F,Prog ″PQX.BZ″改成Prog PQX.BZ【单交点基本型(对称、非对称)平曲线中桩、边桩坐标计算子程序】文件名:PQXZB(可单独执行,调用子程序PQX.F,PQX.BZ)L1 R:H″LS1″:H=0=>I=0:◣I″LS2″:Z:{XY}:X″XJD″:Y″YJD″:T″T1″:H=0=>U=T:◣U″T2″:B″ZH″:H=0=>C=B:◣C″HY″:E″YH″:H=0=>F=E:◣F″HZ″:{A}:A″F1″:Q=A+Z:Z>0=>S=1:≠=>S=-1:◣ J″XZH″=X+Tcos (A+180)◢K″YZH″=Y+Tsin (A+180)◢P″XHZ″=X+Ucos Q◢O″YHZ″=Y+Usin Q◢H≠0=>V=C-B-(C-B)^5÷40R2H2:W=(C-B)^3÷6RH-(C-B)^7÷336R^3H^3:M″XHY″=J+Vcos A+Wcos (A+90S)◢N″YHY″=K+Vsin A+Wsin (A+90S)◢V=F-E-(F-E)^5÷40R2I2:W=(F-E)^3÷6RI-(F-E)^7÷336R^3I^3:Z ″XYH″=P+Vcos (Q+180)+Wcos (Q+90S)◢Z ″YYH″=O+Vsin (Q+180)+Wsin (Q+90S)◢◣Lbl 0L2 {Z}:Z″DQD″L3 Z<B=>Goto 0:◣Z>F=>Goto 0:◣H=0=>G=A+180(Z-B)S÷πR:Prog ″PQX.F″:M=J:N=K:Goto 1:◣Z≤C=>G=A+90(Z-B)2S÷πRH:Prog ″PQX.F″:V=Z-B-(Z-B)^5÷40R2H2:W=(Z-B)^3÷6RH-(Z-B)^7÷336R^3H^3:X=J+Vcos A+Wcos (A+90S)◢Y=K+Vsin A+Wsin (A+90S)◢Prog ″PQX.BZ″:Goto 0:◣Lbl 1L4 Z≤E=>G=A+90(C-B)2S÷πRH+180(Z-C)S÷πR:Prog ″PQX.F″:V=90H÷πR:W=90(Z-C)÷πR:X=M+2Rsin Wcos (A+SV+SW)◢Y=N+2Rsin Wsin (A+SV+SW)◢Prog ″PQX.BZ″:Goto 0:◣Z>E=>G=Q-90(F-Z)2S÷πRI:Prog ″PQX.F″:V=F-Z-(F-Z)^5÷40R2I2:W=(F-Z)^3÷6RI-(F-Z)^7÷336R^3I^3:X=P+Vcos (Q+180)+Wcos (Q+90S)◢Y=O+Vsin (Q+180)+Wsin (Q+90S)◢Prog ″PQX.BZ″:◣Goto 0【平曲线切线方位角计算结果处理子程序】文件名:PQX.FL1 G>0=>G<360=>G″FWJ=″◢≠>G″FWJ″=G-360◢◣≠>G″FWJ″=G+360◢◣【平曲线边桩坐标计算子程序】文件名:PQX.BZL1 {L}:V=G-90:W″XZ″=X+L″ZB″cos V◢W″YZ″=Y+Lsin V◢{L}:V=G+90:W″XY″=X+L″YB″cos V◢W″YY″=Y+Lsin V◢【契形体体积计算程序】文件名:XXTTJL1 V=H÷6×(A″A1″×B″B1″+C″A2″×D″B2″+(A+C)(B+D)) 【竖曲线要素及高程计算程序】文件名:SQXJSL1 M″BZH″:G″BGC″:A″I1″:B″I2″:RL2 W=B-A◢L=RAbs W◢T=L÷2◢E=T2÷2R◢F″QZH″=M-T◢J″ZZH″=M+T◢Lbl 0L3 {Z}:Z″ZH″L4 Z≤F=>H=G-(M-Z)A◢Goto 0:◣Z≥J=>H=G+(Z-M)B◢Goto 0:◣Y=(Z-F)2÷2RL5 H=G-(M-Z)AL6 W≥0=>H=H+Y◢≠=>H=H-Y◢◣Goto 0 使用说明屏幕提示执行操作屏幕显示计算结果BZH? 输入变坡点桩号W= 前后纵坡坡度差BGC? 输入变坡顶点高程L= 竖曲线长度I1? 输入小里程段纵坡(前进方向上坡为+,下坡为-) T= 竖曲线切线长I2? 输入大里程段纵坡(前进方向上坡为+,下坡为-) E= 竖曲线外距R? 输入竖曲线半径QZH= 竖曲线起点桩号ZH? 输入计算点的桩号ZZH= 竖曲线终点桩号H= 计算点的中桩高程【无竖曲线段纵坡高程连续计算程序】文件名:ZPGC L1 F″ZH0″:G″GC0″:IL2 Lbl 0:{N}:N=0=>Goto 0:◣Z=FL3 Lbl 1L4 ″ZH=″:Z=Z+N:Pause 0L5 ″H=″:H=G+(Z-F)I:Pause 2L6 Goto 1使用说明屏幕提示执行操作屏幕显示计算结果ZH0? 输入已知桩号ZH= 计算点的桩号GC0? 输入已知桩号的高程I? 输入纵坡(前进方向下坡为负,上坡为正)H= 计算点的高程N? 输入桩号增量【余弦定理的坐标运用】文件名:YXDL-ZBL1 A″AX″:B″AY″:C″BX″:D″BY″:E″CX″:F″CY″L2 G″AB″=√((C-A)2+(D-B)2)◢H″BC″=√((E-C)2+(F-D)2)◢I″CA″=√((E-A)2+(F-B)2)◢J″<A″=cos-1 ((G2+I2-H2)÷2GI)◢J″360°-<A″=360-J◢J″<B″=cos-1 ((G2+H2-I2)÷2GH)◢J″360°-<B″=360-J◢J″<C″=cos-1 ((H2+I2-G2)÷2HI)◢J″360°-<C″=360-J使用说明屏幕提示执行操作屏幕显示计算结果AX? 输入A点坐标X AB= AB距离AY? 输入A点坐标Y BC= BC距离BX? 输入B点坐标X CA= CA距离BY? 输入B点坐标Y <A= <A角度CX? 输入C点坐标X <B= <B角度CY? 输入C点坐标Y <C= <C角度【施工坐标与大地坐标相互转换程序】文件名:ZBZH(调用子程序文件名:Z.FS,Z.ZH)L1 Lbl 0L2 {XYFG}:X″AX1″:Y″AY1″:U=F″OX1″:Z=G″OY1″L3 Prog ″Z.FS″L4 D=0=>Goto 0:◣E=AL5 Lbl 1L6 {XYHI}:X″AX2″:Y″AY2″:U=H″OX2″:Z=I″OY2″L7 Prog ″Z.FS″L8 D=0=>Goto 1:◣E≥A=>E″ANGLE1->2″=E-A◢≠=>E″ANGLE1->2″=E-A+360◢◣Prog ″Z.ZH″使用说明屏幕提示执行操作屏幕显示计算结果AX1? 输入A点在坐标系1中的坐标XANGLE1->2= 坐标系1到坐标系2的转角AY1? 输入A点在坐标系1中的坐标Y OX1? 输入O点在坐标系1中的坐标X OY1? 输入O点在坐标系1中的坐标Y AX2? 输入A点在坐标系2中的坐标X AY2? 输入A点在坐标系2中的坐标YOX2? 输入O点在坐标系2中的坐标XX2= 计算点在坐标系2中的坐标XOY2? 输入O点在坐标系2中的坐标YX1? 输入计算点在坐标系1中的坐标XY2= 计算点在坐标系2中的坐标YY1? 输入计算点在坐标系1中的坐标Y注意fx-4500P型计算器将L3、L7行改成:Prog Z.FSL8行最后一句改成:Prog Z.ZH【坐标反算子程序】文件名:Z.FSL1 B=X-U:C=Y-ZL2 D=√(B2+C2)L3 D=0=>Goto 0:◣C≥0=>A=cos-1(B÷D):≠=>A=360-cos-1(B÷D):◣Lbl 0【坐标转换子程序】文件名:Z.ZH(可单独执行,调用子程序:Z.FS)L1 U=F″OX1″:Z=G″0Y1″:H″0X2″:I″OY2″:E″ANGLE1->2″L2 Lbl 0L3 {XY}:X″X1″:Y″Y1″L4 Prog ″Z.FS″L5 D=0=>Goto 0:◣A=A-EL6 ″X2=″:X=H+Dcos A:Pause 0L7 Y″Y2″=I+Dsin A◢Goto 0使用说明屏幕提示执行操作屏幕显示计算结果OX1? 输入O点在坐标系1中的坐标XX2=计算点在坐标系2中的坐标XOY1? 输入O点在坐标系1中的坐标YOX2? 输入O点在坐标系2中的坐标XY2=计算点在坐标系2中的坐标YOY2? 输入O点在坐标系2中的坐标YANGLE1->2? 输入坐标系1到坐标系2的转角X1? 输入计算点在坐标系1中的坐标XY1? 输入计算点在坐标系1中的坐标Y注意fx-4500P型计算器将L4行改成:Prog Z.FS【仁宗海交通桥拱圈悬链线坐标计算程序】文件名:XLXL1 M=2.514:F=12.195:L=30.484L2 Lbl 0L3 {X}:J=30.484-XL4 P=-0.00011837194X2+0.0072169X◢A=Jln (M+√(M2-1))÷LL5 D=tan-1(FAsinh A÷J(M-1))◢Y″YZ″=F-F(cosh A-1)÷(M-1)+2363.821+P◢Z″YS″=Y+0.7÷cosD◢{H}:U=Z-H◢W″YX″=Y-0.7÷cosD◢Q=W-H◢Goto 0使用说明屏幕提示执行操作屏幕显示计算结果X? 输入拱圈X坐标(以拱圈左下角为坐标原点)P= 计算点的设计预拱度YZ= 中轴设计高程(已加了设计预拱度P)YS= 上缘设计高程(已加了设计预拱度P)H? 输入实测高程U=上缘设计高程与实测高程的高差:负数表明实测高程高于设计高程正数表明实测高程低于设计高程YX= 下缘设计高程(已加了设计预拱度P)Q=下缘设计高程与实测高程的高差:负数表明实测高程高于设计高程正数表明实测高程低于设计高程注意fx-4500P型计算器将L5行中sinh A改成(e A-e-A)÷2;将coshA改成(e A+e-A)÷2【高斯坐标转换程序】文件名:GSZHL1 A″H0″:Lbl 1:{BCH}:E=B″H1″+C″H2″:F″HD0″=(1+(A-.5E)÷6378245)H″HD″◢Goto 1【高斯坐标转换程序1】文件名:GSZH1L1 A″H0″:R=6378245:Lbl 1:{BCH}:E=B″H1″+C″H2″:F″HD0″=(R+A)H″HD″÷(R+.5E)◢Goto 1使用说明屏幕提示执行操作屏幕显示计算结果H0? 输入投影面高程HD0=高程投影后的平距H1?、H2? 输入该边两端点的高程HD? 输入平距【40米T型梁梁底模反拱度高程控制程序】文件名:FGD-Q(使用全站仪)L1 Lbl 0L2 {XQ}L3 P=.003X-.04+(20-X)2÷10000◢Z=P+2717.90358◢B=Z-Q◢Goto 0使用说明屏幕提示执行操作屏幕显示计算结果X? 输入X坐标(以0#台梁端为(0,0)点,输入范围0~40)P= 计算点与0,0点的设计高差Z= 计算点的设计高程Q? 输入实测高程B= 设计高程-实测高程(正值表示该点偏低,负值表示该点偏高)注意fx-4500P型计算器将L3行中“÷”改为“/”,0#台梁端高程为2717.90358【40米T型梁梁底模反拱度高程控制程序】文件名:FGD-S(使用水准仪)L1 Lbl 0L2 {XQ}L3 P=.003X-.04+(20-X)2÷10000◢Z=P+2717.90358◢B=Z-S+Q◢Goto 0使用说明屏幕提示执行操作屏幕显示计算结果X?输入X坐标(以0#台梁端为(0,0)点,输入范围0~40)P= 计算点与0,0点的设计高差Z= 计算点的设计高程S?输入视线高程(单位:m,只输入一次)B=设计高程-实测高程(正值表示该点偏低,负值表示该点偏高)Q? 输入前视读数(单位:m)注意fx-4500P型计算器将L3行中“÷”改为“/”,0#台梁端高程为2717.90358。
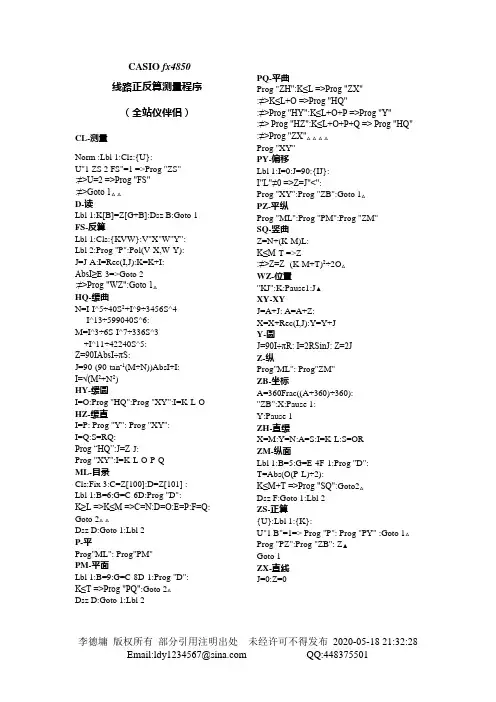
CASIO fx4850线路正反算测量程序(全站仪伴侣)CL-测量Norm :Lbl 1:Cls:{U}:U"1 ZS 2 FS"=1 =>Prog "ZS":≠>U=2 =>Prog "FS":≠>Goto 1△△D-读Lbl 1:K[B]=Z[G+B]:Dsz B:Goto 1 FS-反算Lbl 1:Cls:{KVW}:V"X"W"Y":Lbl 2:Prog "P":Pol(V-X,W-Y):J=J-A:I=Rec(I,J):K=K+I:AbsI≥E-3=>Goto 2:≠>Prog "WZ":Goto 1△HQ-缓曲N=I-I^5÷40S2+I^9÷3456S^4-I^13÷599040S^6:M=I^3÷6S-I^7÷336S^3+I^11÷42240S^5:Z=90IAbsI÷πS:J=90-(90-tan-1(M÷N))AbsI÷I:I=√(M2+N2)HY-缓圆I=O:Prog "HQ":Prog "XY":I=K-L-O HZ-缓直I=P: Prog "Y": Prog "XY":I=Q:S=RQ:Prog “HQ”:J=Z-J:Prog "XY":I=K-L-O-P-QML-目录Cls:Fix 3:C=Z[100]:D=Z[101] :Lbl 1:B=6:G=C-6D:Prog "D":K≥L =>K≤M =>C=N:D=O:E=P:F=Q: Goto 2△△Dsz D:Goto 1:Lbl 2P-平Prog"ML": Prog"PM"PM-平面Lbl 1:B=9:G=C-8D-1:Prog "D":K≤T =>Prog "PQ":Goto 2△Dsz D:Goto 1:Lbl 2 PQ-平曲Prog "ZH":K≤L =>Prog "ZX":≠>K≤L+O =>Prog "HQ":≠>Prog "HY":K≤L+O+P =>Prog "Y":≠> Prog "HZ":K≤L+O+P+Q => Prog "HQ" :≠>Prog "ZX"△△△△Prog "XY"PY-偏移Lbl 1:I=0:J=90:{IJ}:I"L"≠0 =>Z=J"<":Prog "XY":Prog "ZB":Goto 1△PZ-平纵Prog "ML":Prog "PM":Prog "ZM"SQ-竖曲Z=N+(K-M)L:K≤M-T =>Z:≠>Z=Z- (K-M+T)2÷2O△WZ-位置"KJ":K:Pause1:J▲XY-XYJ=A+J: A=A+Z:X=X+Rec(I,J):Y=Y+JY-圆J=90I÷πR: I=2RSinJ: Z=2JZ-纵Prog"ML": Prog"ZM"ZB-坐标A=360Frac((A+360)÷360):"ZB":X:Pause 1:Y:Pause 1ZH-直缓X=M:Y=N:A=S:I=K-L:S=ORZM-纵面Lbl 1:B=5:G=E-4F-1:Prog "D":T=Abs(O(P-L)÷2):K≤M+T =>Prog "SQ":Goto2△Dsz F:Goto 1:Lbl 2ZS-正算{U}:Lbl 1:{K}:U"1 B"=1=> Prog "P": Prog "PY" :Goto 1△Prog "PZ":Prog "ZB": Z▲Goto 1ZX-直线J=0:Z=0使用说明运行CL程序首先程序提示正反算1 ZS2 FS?输1正算、输2反算,其它重选。
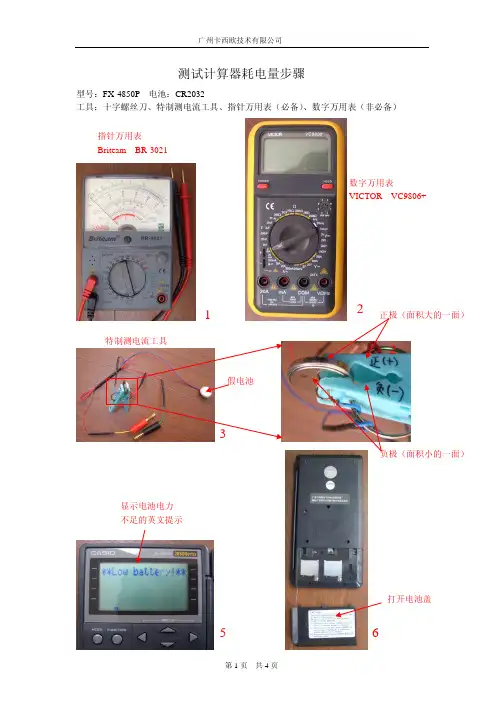
测试计算器耗电量步骤型号:FX-4850P 电池:CR2032工具:十字螺丝刀、特制测电流工具、指针万用表(必备)、数字万用表(非必备)指针万用表Briteam BR-3021数字万用表VICTOR VC9806+正极(面积大的一面)负极(面积小的一面)显示电池电力不足的英文提示打开电池盖1 2652松开螺丝取出电池压片7 8从电池边缺口处撬起旧电池8测量电池电量红接正黑接负红接+A V黑接COM指针移动幅度很小说明旧电池没电9-2旧电池指针移动幅度大(3V)说明新电池电力充足测量新电池电量101211将特制测电流工具的假电池装入计算器电池仓将电池盖滑动开关向上推13-1滑动开关处于此位置表示电池盖已经盖上 此时计算器才能正常工作14-214-1选择2mA 的电流档红接mA 黑接COM1615 测量待机电流,图示值为0.2157mA 等于216uA ,属正常范围测量按键电流,图示值为0.6805mA 等于681uA ,属正常范围键被按住时 本例使用数字万用表测以上为测量计算器耗电量的步骤(完毕)测量关机电流,图示值为0.0065mA 等于6.5uA , 属正常范围已经关机1718-1注意如果更换电池后计算器不能开机,请尝试按此后壳上的复位键,但此操作可能导致内存中的数据丢失装回电池压片并且旋紧螺丝旧电池装回电池盖旧电池21 22 更换电池完毕并且功能正常取出旧电池装入新电池1920。
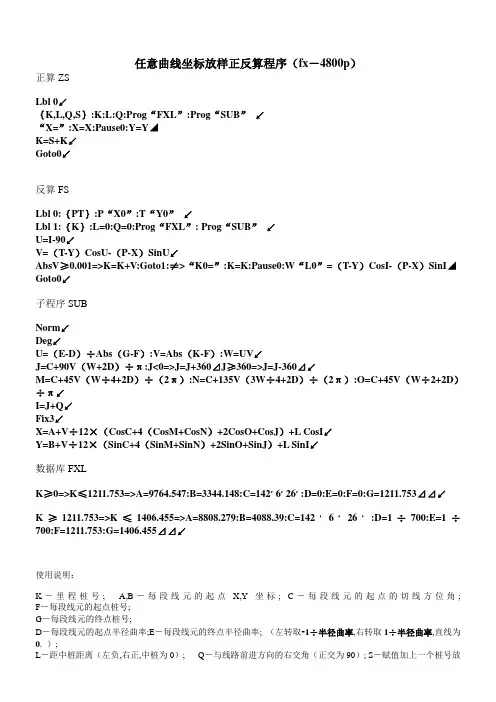
任意曲线坐标放样正反算程序(fx-4800p)正算ZSLbl 0↙{K,L,Q,S}:K:L:Q:Prog“FXL”:Prog“SUB”↙“X=”:X=X:Pause0:Y=Y◢K=S+K↙Goto0↙反算FSLbl 0:{PT}:P“X0”:T“Y0”↙Lbl 1:{K}:L=0:Q=0:Prog“FXL”: Prog“SUB”↙U=I-90↙V=(T-Y)CosU-(P-X)SinU↙AbsV≥0.001=>K=K+V:Goto1:≠>“K0=”:K=K:Pause0:W“L0”=(T-Y)CosI-(P-X)SinI◢Goto0↙子程序SUBNorm↙Deg↙U=(E-D)÷Abs(G-F):V=Abs(K-F):W=UV↙J=C+90V(W+2D)÷π:J<0=>J=J+360⊿J≥360=>J=J-360⊿↙M=C+45V(W÷4+2D)÷(2π):N=C+135V(3W÷4+2D)÷(2π):O=C+45V(W÷2+2D)÷π↙I=J+Q↙Fix3↙X=A+V÷12×(CosC+4(CosM+CosN)+2CosO+CosJ)+L CosI↙Y=B+V÷12×(SinC+4(SinM+SinN)+2SinO+SinJ)+L SinI↙数据库FXLK≥0=>K≤1211.753=>A=9764.547:B=3344.148:C=142,6,26,:D=0:E=0:F=0:G=1211.753⊿⊿↙K≥1211.753=>K≤1406.455=>A=8808.279:B=4088.39:C=142,6,26,:D=1÷700:E=1÷700:F=1211.753:G=1406.455⊿⊿↙使用说明:K-里程桩号; A,B-每段线元的起点X,Y坐标; C-每段线元的起点的切线方位角; F-每段线元的起点桩号;G-每段线元的终点桩号;D-每段线元的起点半径曲率;E-每段线元的终点半径曲率; (左转取-1÷半径曲率,右转取1÷半径曲率,直线为下一个桩号(例: 赋值20确认,即上个桩号加20)D,E取值说明:当线元为直线段,不论其起,止与何线元相接, D,E都取0.当线元为圆曲线,不论其起,止与何线元相接, D,E都取(右偏)1/(左偏)-1÷该圆曲线的半径.当线元为缓和段, 起,止与直线相接, D,E都取0. 与圆曲线相接, D,E都取(右偏)1/(左偏)-1÷该圆曲线的半径. 与缓和段相接, D,E都取0.任意点的切线方位角C说明:编数据库时,若两曲线相接,例:先编ZH至HY段,运行算出HY点的切线方位角,(即求HY点的坐标,然后终止程序调出C值),然后再以计算出的C编HY至YH段.依此类推.反算桩号时需多次确认所输入的X,Y坐标,程序运算至桩号误差小于允许值时,会同时显示结果:K0-桩号,L0-距离.坐标反算程序:ZBFSC“X1”:D“Y1”:E“X2”:F“Y2”:Fixm:Pol(E-C,F-D:I“S=”◢J≤0=>J=J+360⊿J“J=”↙坐标正算程序ZBZSC“X1”:D“Y1”:L:O“J”:Fixm:X=C+Rec(L,O◢Y=D+J↙竖曲线SQXJ“BPD”:B“BPH”:C“I1”:D“I2”:RW=D-C◢A=W÷AbsW:T=Abs(0.5RW)◢L=2T↙E=T2÷2R◢X“QD”=J-T◢Y“ZD”=J+T◢Lbl1:P“K”:H=B+C(P-J)+A(P-J+T)2÷2R◢W“CONT”:W=1=>Goto1:≠>Goto2:⊿↙Lbl2↙说明:BPD-变坡点桩号BPH-变坡点高程I1-前一个坡度(上“+”,下“-”)I2-后一个坡度(上“+”,下“-”)R-半径E-外距QD-该竖曲线起点桩号ZD-该竖曲线终点桩号K-要求的桩号H-要求桩号的高程任意曲线坐标放样正反算程序(fx-4850p)正算ZSLbl 0↙{K,L,Q,S}:K:L:Q:Prog“FXL”:Prog“SUB”↙“X=”:X=X:Pause0:“Y=”:Y=Y◢K=S+K↙Goto0↙反算FSLbl 0:{PT}:P“X0”:T“Y0”↙Lbl 1:{K}:L=0:Q=0:Prog“FXL”: Prog“SUB”↙U=I-90↙V=(T-Y)CosU-(P-X)SinU↙AbsV≥0.001=>“K0=”:K=K+V:Goto1:≠>“K0=”:K=K:Pause0:W=(T-Y)CosI-(P-X)SinI ↙“L0=”:W=W◢Goto0↙子程序SUBNorm↙Deg↙U=(E-D)÷Abs(G-F):V=Abs(K-F):W=UV↙J=C+90V(W+2D)÷π:J<0=>J=J+360⊿J≥360=>J=J-360⊿↙M=C+45V(W÷4+2D)÷(2π):N=C+135V(3W÷4+2D)÷(2π):O=C+45V(W÷2+2D)÷π↙I=J+Q↙Fix3↙X=A+V÷12×(CosC+4(CosM+CosN)+2CosO+CosJ)+L CosI↙Y=B+V÷12×(SinC+4(SinM+SinN)+2SinO+SinJ)+L SinI↙数据库FXLK≥0=>K≤1211.753=>A=9764.547:B=3344.148:C=142,6,26,:D=0:E=0:F=0:G=1211.753⊿⊿↙K≥1211.753=>K≤1406.455=>A=8808.279:B=4088.39:C=142,6,26,:D=1÷700:E=1÷700:F=1211.753:G=1406.455⊿⊿↙使用说明:K-里程桩号; A,B-每段线元的起点X,Y坐标; C-每段线元的起点的切线方位角;D-每段线元的起点半径曲率;E-每段线元的终点半径曲率; (左转取-1÷半径曲率,右转取1÷半径曲率,直线为0. );L-距中桩距离(左负,右正,中桩为0); Q-与线路前进方向的右交角(正交为90); S-赋值加上一个桩号放下一个桩号(例: 赋值20确认,即上个桩号加20)D,E取值说明:当线元为直线段,不论其起,止与何线元相接, D,E都取0.当线元为圆曲线,不论其起,止与何线元相接, D,E都取(右偏)1/(左偏)-1÷该圆曲线的半径.当线元为缓和段, 起,止与直线相接, D,E都取0. 与圆曲线相接, D,E都取(右偏)1/(左偏)-1÷该圆曲线的半径. 与缓和段相接, D,E都取0.任意点的切线方位角C说明:编数据库时,若两曲线相接,例:先编ZH至HY段,运行算出HY点的切线方位角,(即求HY点的坐标,然后终止程序调出C值),然后再以计算出的C编HY至YH段.依此类推.反算桩号时需多次确认所输入的X,Y坐标,程序运算至桩号误差小于允许值时,会同时显示结果:K0-桩号,L0-距离.任意曲线坐标放样正反算程序(fx-4800p)任意曲线坐标放样正反算程序(fx-4850p)。

CASIO 4800计算器程序使用说明一、程序列表:1。
PQX:主程序,计算路线的中边桩坐标。
(1)"L0"--- 输入测段的近似桩号,来调取合适的平曲线要素数据,输入0则默认上次输的平曲线要素。
输入-1可以手工输入交点桩号JL,交点X坐标JX,交点Y坐标JY,I0为前一交点与本交点的直线方位角,J0为本交点的偏角(左负右正),R为圆曲线半径,LS为缓和曲线长度,L1为上一交点的HZ(或YZ)的桩号,L2为下一交点的ZH(或ZY)桩号。
(2)"L"---输入计算点的桩号(3)"JJ"---输入与路线前进方向的右交角(正交为90)(4)"YC"---输入与中桩的距离(左侧为负,右侧为正)注:若JJ和YC中任一个输入为0,则可返回上一级,重新输入桩号计算.若YC输入为-1,可以输入实测点的坐标X和Y来反算与中桩宽度YC,桩号差值DL和该点的近似桩号L.(5)"X,Y"数值1数值2显示计算点的坐标值X,Y(6)"A,D"ddd°mm′ss″数值4显示测站点与放样点的方位角及平距(7)"TMP"---进入自由运算状态,若计算结果为0则退出该状态.该状态会破坏变量I的内容.(8)"YC"---输入-1进入反算桩号模式,程序要求输x,y坐标,若x,y坐标其中任一输入为0则退出该状态.2.LYC程序:两个作用:一是根据实测坐标反算桩号L和与中桩宽度YC, 二是根据输入的三维坐标x,y,z和输入的设计标高SG以及"YC0","HC0","M"来进行边坡放样.(1)"L0"--- 输入测段的近似桩号,(2)"XF","YF","ZF"----输入测点的三维坐标x,y,z若ZF输为0则只反算桩号,若不为0则进行边桩放样.(3)"DL"---反算桩号时显示中间结果桩号差值DL,若DL值过大,可以重新输入测段的近似桩号来计算.(4) "L,YC"---显示桩号L和与中桩距YC(左负右正),存在变量L和O中.(5) "SG:"---输入路基边缘的设计高程(请分清左右),存在变量Z[10]中.(6) TW---显示填挖高度值(负值为挖方高度,正值为填方高度),存在变量C中.(7) "YC0"-路基横断面图上最后一个变坡点与中桩的水平宽度(左右均为正值),存在变量P中.(8)"HC0"---路基横断面图上最后一个变坡点与路基边缘设计标高的高差,挖方平台为正值,填方平台为负值,存在变量Q中.(9) "M="---路基横断面图上最后一级边坡的坡比,存在变量T中.(10) "BL"---显示在实测标高位置的路基设计宽度,存在变量U中.(11)"DB"---显示设计宽度和实测宽度的差值,存在变量J中.若DB为负值,则应往中桩位置移动(宽度减小),若DB为正值,则应往路线外侧移动(宽度增大).3、ZZ子程序---计算中桩坐标以及前进方位角的子程序。
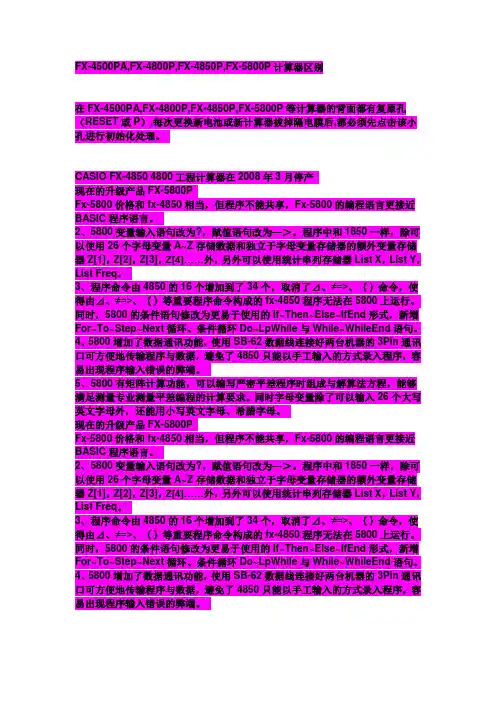
FX-4500PA,FX-4800P,FX-4850P,FX-5800P计算器区别在FX-4500PA,FX-4800P,FX-4850P,FX-5800P等计算器的背面都有复原孔(RESET或P),每次更换新电池或新计算器拔掉隔电膜后,都必须先点击该小孔进行初始化处理。
CASIO FX-4850 4800工程计算器在2008年3月停产现在的升级产品FX-5800PFx-5800价格和fx-4850相当,但程序不能共享,Fx-5800的编程语言更接近BASIC程序语言。
2、5800变量输入语句改为?,赋值语句改为—>。
程序中和1850一样,除可以使用26个字母变量A~Z存储数据和独立于字母变量存储器的额外变量存储器Z[1],Z[2],Z[3],Z[4]……外,另外可以使用统计串列存储器List X,List Y,List Freq。
3、程序命令由4850的16个增加到了34个,取消了⊿、≠=>、{}命令,使得由⊿、≠=>、{}等重要程序命令构成的fx-4850程序无法在5800上运行。
同时,5800的条件语句修改为更易于使用的If~Then~Else~IfEnd形式,新增For~To~Step~Next循环、条件循环Do~LpWhile与While~WhileEnd语句。
4、5800增加了数据通讯功能,使用SB-62数据线连接好两台机器的3Pin通讯口可方便地传输程序与数据,避免了4850只能以手工输入的方式录入程序,容易出现程序输入错误的弊端。
5、5800有矩阵计算功能,可以编写严密平差程序时组成与解算法方程,能够满足测量专业测量平差编程的计算要求。
同时字母变量除了可以输入26个大写英文字母外,还能用小写英文字母、希腊字母。
现在的升级产品FX-5800PFx-5800价格和fx-4850相当,但程序不能共享,Fx-5800的编程语言更接近BASIC程序语言。
2、5800变量输入语句改为?,赋值语句改为—>。
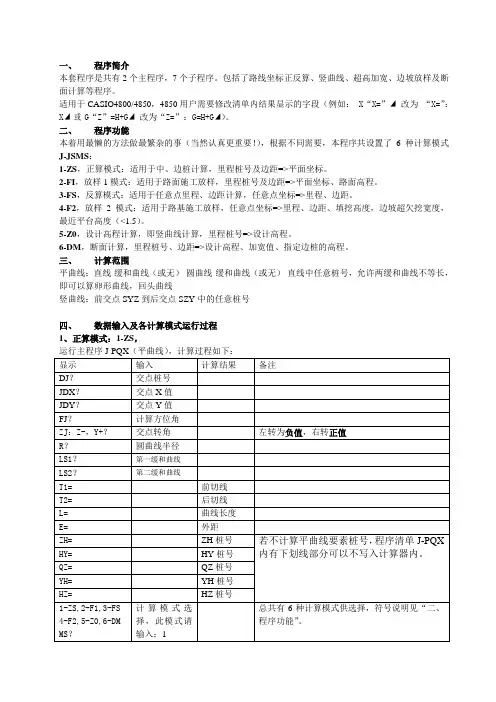
一、程序简介本套程序是共有2个主程序,7个子程序。
包括了路线坐标正反算、竖曲线、超高加宽、边坡放样及断面计算等程序。
适用于CASIO4800/4850,4850用户需要修改清单内结果显示的字段(例如: X“X=”◢改为“X=”:X◢或G“Z”=H+G◢改为“Z=”:G=H+G◢)。
二、程序功能本着用最懒的方法做最繁杂的事(当然认真更重要!),根据不同需要,本程序共设置了6种计算模式J-JSMS:1-ZS,正算模式:适用于中、边桩计算,里程桩号及边距=>平面坐标。
2-FI,放样1模式:适用于路面施工放样,里程桩号及边距=>平面坐标、路面高程。
3-FS,反算模式:适用于任意点里程、边距计算,任意点坐标=>里程、边距。
4-F2,放样2模式:适用于路基施工放样,任意点坐标=>里程、边距、填挖高度,边坡超欠挖宽度,最近平台高度(<1.5)。
5-Z0,设计高程计算,即竖曲线计算,里程桩号=>设计高程。
6-DM,断面计算,里程桩号、边距=>设计高程、加宽值、指定边桩的高程。
三、计算范围平曲线:直线-缓和曲线(或无)-圆曲线-缓和曲线(或无)-直线中任意桩号,允许两缓和曲线不等长,即可以算卵形曲线,回头曲线竖曲线:前交点SYZ到后交点SZY中的任意桩号四、数据输入及各计算模式运行过程1、正算模式:1-ZS,运行主程序J-PQX(平曲线),计算过程如下:2、反算模式:3-FS,运行主程序J-PQX(平曲线),运行过程同“1、1-ZS,正算模式”;若平曲线数据已经输入了,或者计3、纵断面设计高程计算:5-Z0,步骤1:首先运行J-SQX(竖曲线),此步骤只是竖曲线数据输入,不进行计算。
若计算交点与上次计算交点相同,可跳过此步骤。
输入过程如下:之所以分开两个步骤,是因为当计算桩号超出计算范围时程序会自动切换到竖曲线数据输入状态,避免出现低级失误。
而且将计算放在J-JSMS中会使程序更加灵活。
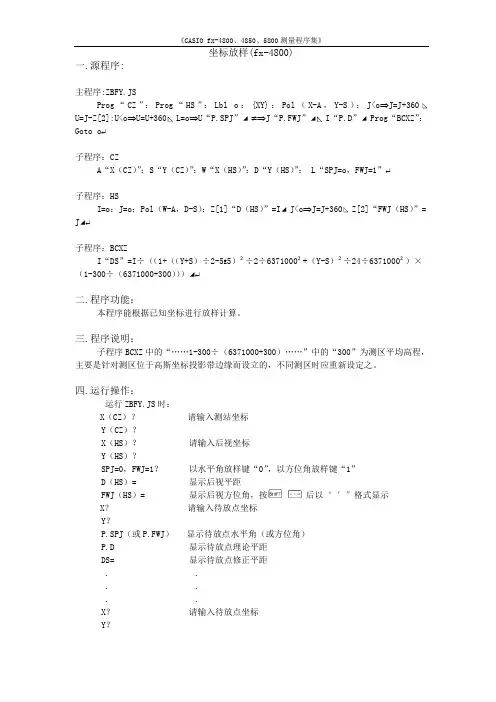
坐标放样(fx-4800)一.源程序:主程序:ZBFY.JSProg“CZ”:Prog“HS”:Lbl o:{XY}:Pol(X-A,Y-S):J<o⇒J=J+360U=J-Z[2]:U<o⇒U=U+360L=o⇒U“P.SPJ”◢≠⇒J“P.FWJ”◢I“P.D”◢Prog“BCXZ”:Goto o↵子程序:CZA“X(CZ)”:S“Y(CZ)”:W“X(HS)”:D“Y(HS)”: L“SPJ=o,FWJ=1”↵子程序:HSI=o:J=o:Pol(W-A,D-S):Z[1]“D(HS)”=I◢J<o⇒J=J+360Z[2]“FWJ(HS)”= J◢↵子程序:BCXZI“DS”=I÷((1+((Y+S)÷2-5E5)²÷2÷6371000²+(Y-S)²÷24÷6371000²)×(1-300÷(6371000+300)))◢↵二.程序功能:本程序能根据已知坐标进行放样计算。
三.程序说明:子程序BCXZ中的“……1-300÷(6371000+300)……”中的“300”为测区平均高程,主要是针对测区位于高斯坐标投影带边缘而设立的,不同测区时应重新设定之。
四.运行操作:运行ZBFY.JS时:X(CZ)?请输入测站坐标Y(CZ)?X(HS)?请输入后视坐标Y(HS)?SPJ=0,FWJ=1?以水平角放样键“0”,以方位角放样键“1”D(HS)= 显示后视平距FWJ(HS)= 显示后视方位角,按后以°′″格式显示X?请输入待放点坐标Y?P.SPJ(或P.FWJ)显示待放点水平角(或方位角)P.D 显示待放点理论平距DS= 显示待放点修正平距. .. .. .X?请输入待放点坐标Y?引点计算(fx-4800)一.源程序:主程序:YD.JSProg“CZ”:M“H(CZ)”:Prog“HS”:Lbl o:{PVH}:L=o⇒P=P“SPJ”+Z[2]:≠⇒P “FWJ”V“D”:H“h”:X=A+Vcos P◢Y=S+Vsin P◢ H=M+H+6.7336E-8V²◢Goto o↵子程序:CZA“X(CZ)”:S“Y(CZ)”:W“X(HS)”:D“Y(HS)”: L“SPJ=o,FWJ=1”↵子程序:HSI=o:J=o:Pol(W-A,D-S):Z[1]“D(HS)”=I◢J<o⇒J=J+360Z[2]“FWJ(HS)”= J◢↵二.程序功能:本程序能根据水平角(或方位角)、平距、高差进行三维坐标计算。

Casio Fx-4800P计算器测量计算程序抚顺市市政建设(集团)有限公司第一工程处:张和光Casio Fx-4800P一、整机概况Fx-4800P计算器是日本Casio公司的产品,它除了具备函数型计算器的全部功能之外,还具备如下特殊功能:1、二进制和八进制字组显示;2、二进制、八进制、十进制和十六进制的转换和加、减、乘、除运算。
3、进行f(x)函数的输入与积分的计算;4、进行标准差和回归计算。
Fx-4800P计算器具有同时显示运算表达式和计算结果的四行式显示的特点。
该计算器具有记存4500个程序步的记忆储存装置,计算器储存了程序之后,只要您输入数据,再按一下EXE键,计算器就会用数据进行程序执行,对于随数据而变化的反复计算的运用十分方便。
Fx-4800P计算器具备条件指令转移和非条件指令转移的能力,还具备逻辑判断能力,因此它可以进行测量工作中比较复杂的计算,当然其它专业的计算工作也同样可以解决。
(1)Fx-4800P计算器操作方法比较简单、易学,程序编排灵活、易懂,可称之谓各专业技术人员的物美、价廉、得心应手的计算工具。
每一台Fx-4800P计算器都具备一本说明书,该计算器各部键的功能以及操作方法,只要认真按照说明书各章节学习,很快就能掌握和运用,现将我在生产实践中应用的部分计算程序介绍给测绘界的同行以便共同探讨。
(2)二、程序库1.坐标反算:程序步骤:C”X1”:D”Y1”:E”X2”:F”Y2”:Fixm:Pol(E-C ,F-D:I”S1-2=”◢J≤O=>J=J+360△J”A1-2=”操作过程:ZBFS→EXE→输入X1值→EXE→输入Y1值→EXE→输入X2值→EXE→Y2→EXE→EXE→EXES1-2:计算得出的距离;A1-2:计算得出的角度。
(按shift°′″转换为60进制的角度)注:此程序可循环计算。
(3)2.坐标正算:程序步骤:C”X1”:D”Y1”:S”S1-2”:R”A1-2”:Fixm:X”X 2”=C+Rec(S,R◢Y” Y2”=D+J操作过程:ZBZS→EXE→输入X1值→EXE→输入Y1值→EXE→输入S1-2距离→EXE→输入A1-2角度(例125°31′23.25″)→EXE→EXE注:此程序可循环计算。
一、运行变量名称说明:M为待求桩号K为左右偏距(左-右+)G为路线正斜交角H、I为待求点的X、Y坐标U为待求桩即时切线方位角二、要素程序输入中的变量说明:XY为起点坐标W为单曲线段起始方位角E、F为单曲线段起止桩号A、B为单曲线段起止半径(起或止为缓和曲线的输为缓和参数) Q=-1、1分别指单曲线段的左转、右转J=1、-1分别为缓和曲线指ZH->HY、YH->HZ方向P=1、2、3分别指单曲线段为直线、圆曲线、缓和曲线另外:主线中Z=1、2为断链1、2段(如K8+273.243=K8+100) 三、主程序中第三句根据需求线路随时更换子程序名。
主程程序"ZBJS":Lbl 0{M}:"SQD"Prog "AB"X"X"Y"Y"W"FWJ"E"QD"P:"1 2 3"P=1=>Goto 1:≠=>P=2=>Goto2:≠=>P=3=>Goto 3 Lbl 1 进入直线段计算M{K}{G}F"FWJ"W◢H=X+(M-E)*cosW+K*cos(W+G)◢I=Y+(M-E)*sinW+K*sin(W+G)◢Goto 0M<F=>Goto 1:≠=>X=H:Y=I:E=M:P=0:Goto 0 Lbl 2 进入圆曲线计算A"R"M{K}{G}FO=X+A*cos(W+90Q) 圆心坐标(O,P)P=Y+A*sin(W+90Q)V=Abs(M-E)/A*180/π*Q"a0"U=W+V◢H=O+A*cos(U-90Q)+K*cos(U+G)◢I=P+A*sin(U-90Q)+K*sin(U+G)◢Goto 0M<F=>Goto 2:≠=>X=H:Y=I:W=U:E=M:P=0:Goto 0Lbl 3 进入缓和曲线计算A"QD R"B"AZ"M{K}{G}FC=B^2"ZH=1 HZ=-1"JL=C/AV=(F-E)/Abs(F-E)Z=W+L^2/(2C)*180/π*Q*(-J)T=L+(Abs(M-E))JU=Z+T^2/(2C)*QJV*180/π◢O=(T-L)-(T^5-L^5)/(40C^2)+(T^9-L^9)/(3456C^4)-(T^13-L^13)/599040C^6+(T^17-L^17)/175472640 C^8P=(T^3-L^3)/(6C)-(T^7-L^7)/(336C^3)+(T^11-L^11)/(42240C^5)-(T^15-L^15)/9676800C^7+(T^19-L^19)/3530096640C^9D=VJS=QJH=X+OD*cosZ+PD*cos(Z+90S)+K*cos(U+G)◢I=Y+ODsinZ+PDsin(Z+90S)+K*sin(U+G)◢Goto 0M<F=>Goto 3:≠=>X=H:Y=I:W=U:E=M:P=0:Goto 0主线"ZX":M>5865=>X=3361488.152:Y=449202.642:W=101`49`58`:E=5865:P=1M>5865.526=>X=3361488.044:Y=449203.157:W=101`49`58`:E=5865.526:A=9^60:B=1096.59:Q=-1: J=1:P=3:F=6235.526M>6235.526=>X=3361419.068:Y=449566.617:W=98`34`16.9`:E=6235.526:A=3250:Q=-1:P=2M>7674.84=>X=3361521.529:Y=450990.516:W=73`11`49.3`:E=7674.84:F=8044.84:A=3250:B=1096. 59:J=-1:Q=-1:P=3M>8044.84=>X=3361641.834:Y=451340.355:W=69`56`7.9`:E=8044.84:P=1:Z=2=>X=3361720.194:Y =451554.895:W=69`56`7.9`:E=8100:P=1匝"AB":M≥0=>X=3361721.181:Y=450482.643:W=85`46`15`:E=0:A=800:Q=1:P=2M>716.396=>X=3361468.151:Y=451127.474:W=137`4`44`:E=716.396:F=776.396:Q=-1:A=9^45:B=6 0:P=3:J=1M>776.396=>X=451174.516:W=108`25`51.6`:Q=-1:A=60:E=776.396:P=2M>842.929=>X=3361446.56:Y=451235.989:W=44`53`50`:A=60:B=60:Q=-1:E=842.929:F=902.929:J =-1:P=3M>902.929=>X=3361499.992:Y=451261.793:W=16`14`58`:E=902.929:F=947.929:Q=1:A=9^45:B=9 0:J=1:P=3M>947.929=>X=3361542.602:Y=451276.164:W=23`24`41.1`:E=947.929:Q=1:A=180:P=2M>1047.145=>X=3361618.517:Y=451338.083:W=54`59`34.26`:E=1047.145:F=1141.034:Q=1:J=-1:A =180:B=130:P=3匝"C":M≥842.929=>X=3361446.56:Y=451235.989:W=44`53`50`:E=842.929:A=60:Q=-1:P=2M>932.843=>3361528.246:Y=451238.793:W=319`02`08.44`:E=932.843:F=1067.843:Q=-1:J=-1:A=6 0:B=90:P=3M>1067.843=>X=3361541.195:Y=451111.894:W=354`34`40`:E=1067.843:P=1匝"D":M≥0=>X=3361640.231:Y=450877.857:W=115`7`37`:A=791.747:B=55:E=0:F=46.596:P=3:J=1:Q=1 M>46.596=>X=3361614.603:Y=450916.347:W=139`3`39.2`:E=46.596:A=60:Q=1:P=2M>101.697=>X=3361563.143:Y=450929.781:W=191`40`42.5`:E=101.697:F=234.195:A=60:B=90:Q= 1:J=-1:P=3匝"E":M≥0=>X=3361652.781:Y=450889.678:W=115`30`28`:E=0:F=53.571:A=9^45:B=150:Q=-1:J=1:P=3 M>53.571=>X=3361630.748:Y=450938.498:W=111`51`13.6`:E=53.571:A=420:Q=-1:P=2M>303.928=>X=3361610.206:Y=451184.308:W=77`42`1.6`:E=303.928:F=385.416:A=420.:B=185:J=-1:Q=-1:P=3M>385.416=>X=3361632.665:Y=451262.605:W=72`8`31.93`:E=385.416:P=1匝"FH":M≥0=>X=3361721.183:Y=450482.658:W=265`46`15`:E=0:P=1M>687.778=>X=3361670.463:Y=449796.752:W=365`46`15`:E=687.778:F=747.778:A=9^50:B=60:J= 1:Q=-1:P=3M>747.778=>X=3361656.351:Y=449739.118:W=237`7`22.6`:E=747.778:Q=-1:A=60:P=2M>956.691=>X=3361569.331:Y=449819.209:W=37`37`32.61`:E=956.691:F=1038.357:A=60:B=70:J= -1:Q=-1:P=3M>1038.357=>X=3361647.7:Y=449835.267:W=358`37`59`:E=1038.357:P=1匝"G":M≥838.838=>X=3361576.113:Y=449719.64:W=150`10`2`:A=60:B=60:E=838.838:F=898.838:J=-1:Q =-1:P=3M>898.838=>X3361537.147:Y=449764.388:W=121`31`9.6`:E=898.838:F=949.463:A=9^50:B=90:J= 1:Q=1:P=3M>949.463=>X=3361508.476:Y=449806.043:W=130`35`1.34`:E=949.463:A=160:Q=1:P=2M>1033.468=>X=3361439.935:Y=449852.931:W=160`39`56.8`:E=1033.468:F=121.958:A=160:B=13 0:J=-1:Q=1:P=3匝"I":{Z}M≥0=>X=3361694.914:Y=450016.224:W=265`46`15`:E=0:F=66.176:A=9^45:B=75:J=1:Q=1:P=3 M>66.176=>X=3361698.579:Y=449950.594:W=288`4`27`:E=66.176:A=85:Q=1:P=2M>105.294:=>X=3361718.698:Y=449917.45:W=314`26`32.5`:E=105.294:F=157.408:A=85:B=75:J=-1:Q=1:P=3M>157.408=>X=3361762.343:Y=449889.539:W=335`44`20`:E=157.408:A=400:Q=1:P=2M>256.758=>X=3361857.034:Y=449860.326:W=349`58`11`:E=256.758:F=337.758:A=400:B=180:J=-1:Q=1:P=3匝"J":M≥0=>X=3361678.559:Y=450017.433:W=265`46`15`:E=0:F=66.176:A=9^50:B=75:J=1:Q=-1:P=3 M>66.176=>X=3361665.281:Y=449953.056:W=243`28`2.8`:E=66.176:A=80:Q=-1:P=2M>104.77=>X=3361640.922:Y=449923.549:W=217`27`9`:E=104.77:F=161.779:A=85:B=80:J=-1:Q=-1:P=3M>161.779=>X=3361588.865:Y=449901.365:W=193`34`20.8`"E=161.779:A=350:Q=-1:P=2M>215.557=>X=3361535.825:Y=449892.803:W=184`46`8`:E=215.557:F=279.843:A=350:B=150:J=-1:Q=-1:P=3M>279.843=>X=3361471.579:Y=449891.389:W=179`30`25`:E=279`843:P=1FX4800P常用测量程序集1、由一个已知点坐标和一个已知方位角计算支导线坐标(程序名:ZBJS)程序清单:X:Y:T:Lb1 0:Fixm:{AS}:T=T+A-180:T〈0 =〉T=T+360⊿T〉360 =〉T=T-360⊿T◢X=X+Scos T◢Y=Y+Ssin T◢Goto 0程序运行说明:运行“ZBJS”,每运行一步按EXE键一次,显示X?时输入已知点X坐标,显示Y?时输入已知点Y坐标,显示T?时输入已知点由后视到前视的已知坐标方位角,运行一次本程序只需输入一次已知数据。
CASIO4800、4850坐标正反计算程序[MC2008.01.29][/B][/fly][/color] 2008年1月27日更新,加入了坐标反算功能,坐标正算加入斜角计算功能。
程序特点:真正的全线贯通坐标正反计算!在曲线元要素输入时仅需要输入第一段全部曲线元要素,后面曲线元要素除起点半径、终点半径、曲线长、转向需输入外其他要素均从前一曲线按辛普森8等分计算得出,解决了主线坐标计算无法获得第二段及其以后曲线元起点参数的问题;辛普森公式任意等分,满足所有精度要求;全线曲线元数据一次性程序化输入,参数存储采用扩充变量数据库,无需修改程序内容;多功能采用单程序编程,避免频繁调用子程序,提高运算输度;傻瓜操作,特别适用初学者。
一、程序:MCW“1.ZS 2.FS 3.SZ”:W=1=>Z[2]=0:V=0:Goto 1 ΔW=2=> Goto 4ΔW=3=> O“KOU LING”:O≠123456=>O=0: “OUT” ◢Goto DΔO=0: V=0:Z[1]=0:Goto 0←┘Lbi 0←┘”N0.”:Z[1]+1 ◢←┘Z[1]=0=>{ABCREFGU}:A“X0”:B“Y0”:C“F0”:R“R0”:E“RN”:F“D0”:G“LS”:U“G”:Z[Z[1]×8+3]=A:Z[Z[1]×8+4]=B:Z[Z[1]×8+5]=C:Z[Z[1]×8+6]=R-1:Z[Z[1]×8+7]=E-1:Z[Z[1]×8+8]=F: Z[Z[1]×8+9]=F+G: Z[Z[1]×8+10]=U: “NEXT”◢Isz Z[1]: Goto 0ΔZ[1]=1=>D=Z[9]:Z=0:Z[2]=0:GOTO 2ΔD=Z[(Z[1]-1)×8+9]:Z=0:Z[2]=Z[1]-1:GOTO 2←┘Lbi A←┘Z[Z[1]×8+3]=X:Z[Z[1]×8+4]=Y:Z[Z[1]×8+5]=J: Z[Z[1]×8+8]=D: {REGU}:R“Ro”:E“RN”: G“LS”:U“G”: Z[Z[1]×8+6]=R-1: Z[Z[1]×8+7]=E-1: Z[Z[1]×8+9]=D+G: Z[Z[1]×8+10]=U: “NEXT”◢Isz Z[1]: Goto 0←┘Lbi 1←┘{DZO }:D:Z:O“RJ”:Z[2]=0:Goto 2←┘Lbi 2←┘V≠1=>Z[2]>Z[1] =>GoToDΔΔD≤Z[Z[2]×8+9]=> A=Z[Z[2]×8+3]:B=Z[Z[2]×8+4]: C =Z[Z[2]×8+5]:R=Z[Z[2]×8+6]: E=Z[Z[2]×8+7]: F=Z[Z[2]×8+8]: G=Z[Z[2]×8+9]: U=Z[Z[2]×8+10]: Goto3ΔIsz Z[2]:Goto 2←┘Lbi 3←┘W=3 =>N=8:=≠>N=4ΔP=U(E-R)÷Abs(G-F):Q=Abs(D-F)÷N:S=90Q÷π:J =C+(NPQ+2UR)NS:L=1←┘X=A+Q÷6×(Cos C+Cos J +4∑(Cos (C+((L+0.5)PQ+2UR)×(L+.5)S),L,0,(N-1))+2∑(Cos (C+((LPQ+2UR)LS,L,1,(N-1)))+ZCos(J+ O)←┘Y=B+Q÷6×(Sin C+Sin J +4∑(Sin (C+((L+0.5)PQ+2UR)×(L+.5)S),L,0,(N-1))+2∑(Sin (C+((LPQ+2UR)LS,L,1,(N-1)))+Z Sin(J+ O):V=1=>Goto6ΔV=2=>Goto9ΔV=3=> GOTO CΔW=3=>GOTO AΔZ=0=>“X”:X:Pause 0: “Y” :Y◢ Goto 1ΔZ<0=>“XL”:X:Pause 0: “YL”:Y◢ Goto 1Δfx4850 ①Z>0=>“XR”:X:Pause 0: “YR”:Y ◢Goto 1 ←┘Z=0=> X “X” ◢Y “Y”◢ Goto 1ΔZ<0=> X “XL” ◢Y “YL”◢ Goto 1Δfx4800 ②Z>0=> X “XR” ◢Y “YR”◢Goto 1 ←┘Lbi 4←┘{MH} :M“X” :H“Y” :Z[2]=0:GOTO 5←┘Lbi 5←┘V=1:D= Z[Z[2]×8+9]:Z=0 :O=90:GOTO 2←┘Lbi 6←┘K=((H -B)Cos(C-90)-(M-A)Sin(C-90))×((H -Y)Cos(J-90)-(M-X)Sin (J-90)):K≤0=> Goto 7ΔIsz Z[2]:Goto5←┘Lbi 7←┘D=F+Abs((H -B)Cos(C-90)-(M-A)Sin(C-90)):D>G=> Isz Z[2]: Goto5ΔGoto 8←┘Lbi 8←┘V=2 :GOTO 3←┘Lbi 9 ←┘K=(H -Y)Cos(J-90)-(M-X)Sin(J-90):AbsK<0.001=>Goto BΔD=D+K :GOTO 8←┘Lbi B←┘V=3 :Z=0 :Goto 3←┘Lbi C←┘Z=(H-Y) ÷Sin(J+90):“D”:D:Pause 0: “Z” : Z◢(Z=(H-Y) ÷Sin(J+90):D“D” ◢“Z” Z◢)4800输出GOTO 4←┘Lbi D←┘二、说明a、编制说明本程序是运用复化辛普生公式根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距,对该曲线段范围内任意里程中边桩坐标进行计算,以及对卡西欧扩充变量的灵活应用,实现了真正意义上的的全线贯通及曲线要素输入程序化(在不修改程序内容的情况下可通过运行程序输入任意多段曲线元要素)。
举个例子:有一方程式:a=2b-c求当a=2、c=5时的b值。
将该方程式存入公式存贮器中,:先按按解答键“SOLVE” a输入2 、c输入5,再按解答键“SOLVE”计算器就会显示:b=3.5。
此项功能被称为自动解答功能。
同时它也是非常实用的,在实际工作中通常要有一个经常使用的小公式,可借助它来完成。
4800使用的程序语言可以算做简单的BASIC语言,4850基本上跟4800一样,有的命令如GOTO(转移到)、PAUSE(暂停)就与BASIC语言的一模一样。
现在4800的程序语言来说说。
其主要命令有:1、=>…… 条件转移成立符号,其用法相当于BASIC中的IF……THEN(假设语句相当于假如……然后,IF相当于条件……THEN相当于结果)语句2、≠>……条件转移不成立符号,其用法相当于BASIC中的IF……ELSE语句通常二者连用,相当于BASIC中的IF……THEN……ELSE语句(它的英语形式一般为if a>b then c>d else if b>a the……)3、⊿…… 条件转移结束符号,与=>和≠>配合使用,放在条件语句最后面。
4、LbI……标记命令。
用于将一段语句作转换标记。
后可接字母、数字、符号,但不能超过两个字节,如不能用≥10的数字作行标,否则会出现出错信息。
5、Goto…… (条件)转移命令。
前面可加条件语句,与BASIC中的GOTO作用相同。
通常与LbI一起用,如果所转移的行号无效,则会显示:GO ERROR(详见说明书)出错信息6、Dsz……减量循环命令。
可减少未知数的数量。
7、Isz……增量循环命令。
8、Pause……暂停命令。
后可接0~9之间的整数n,可使某一数据显示n/2秒钟,然后继续运行下面的程序。
它被认为是一个语句。
9、Fixm……变量锁定命令。
该命令能使其所有变量值(A~Z)均当成定数处理。
当程序运行时,将不需要输入变数(“{}”内的变数除外),而是将存贮器中原有的数值来完成计算。