船舶的摇摆控制
- 格式:docx
- 大小:11.88 KB
- 文档页数:4
船舶倾斜摇摆试验指南最新
哎呀呀,这题目可真把我难住啦!“船舶倾斜摇摆试验指南最新”,这对我一个小学生(初中生)来说,简直就像让我去解开超级复杂的数学谜题一样!
我想想啊,船舶倾斜摇摆,那是不是就像我们在游乐场坐的那种疯狂的摇摆船呀?只不过这个是为了做试验。
想象一下,一艘大大的船舶,在波涛汹涌的大海上,一会儿往左倾斜,一会儿往右摇摆。
这得需要多厉害的技术和准备才能进行这样的试验呀?
做这个试验,肯定要有很多勇敢又聪明的人在一起合作。
就好像我们班组织活动一样,有人负责指挥,有人负责记录,有人负责观察。
“嘿,小王,你可要看好那个仪表的数据,一点儿都不能出错!”“放心吧,老张,我眼睛都不会眨一下!”这对话,是不是很有画面感?
做这个试验,是不是要先选一个天气不太糟糕但也有一定风浪的日子?不然一直风平浪静的,怎么能看出船舶的真实表现呢?
还有啊,试验的时候,那些仪器设备得特别精准吧?要是不准,那不就像我们考试拿了个坏了的尺子,答案全错啦!
我就在想,要是我在那艘船上,我会不会吓得腿都软了?毕竟船晃来晃去的,多吓人呐!
不过,这个试验肯定特别重要。
就像我们考试是为了检验学习成果,船舶倾斜摇摆试验是为了保证船舶在大海上能安全航行,不出现危险。
你说,要是没有这样的试验,船舶出海遇到大风浪,那不就糟糕啦?
所以啊,船舶倾斜摇摆试验真的是太关键啦!它能让我们在海上航行的时候更安心,更放心!
我的观点就是:船舶倾斜摇摆试验虽然复杂又充满挑战,但却是保障船舶安全的重要环节,绝对不能马虎!。
船用减摇装置原理船舶在航行过程中会受到海浪的影响,从而产生摇晃的运动,这种摇晃会给船舶和船员带来很大的安全隐患。
为了解决这个问题,船舶上通常会安装减摇装置,以减小船体的摇晃幅度,提高船舶的稳定性和航行安全性。
船用减摇装置的原理主要包括水动力原理和控制原理两个方面。
水动力原理是指利用水的力量来抵消船舶的摇晃运动。
船用减摇装置通常由一个或多个减摇槽组成,这些减摇槽位于船舶的两侧,沿船体纵向分布。
当船舶受到侧向波浪的作用时,水会穿过减摇槽,形成与波浪相位相反的力,从而产生一个与船舶摇晃方向相反的力矩。
这样,船舶受到的摇摆力矩就会减小,从而减小了船体的摇晃幅度。
控制原理是指通过一系列的控制系统来实时监测船体的摇晃情况,并根据监测结果调整减摇装置的工作状态。
控制系统通常由传感器、计算机和执行机构组成。
传感器用于感知船体的摇晃情况,如倾斜角度、加速度等;计算机用于处理传感器采集到的数据,并根据一定的控制算法计算出减摇装置的工作状态;执行机构则根据计算机的指令,调整减摇装置的工作参数,如减摇槽的开启程度、开启时间等。
船用减摇装置的工作过程可以简单概括为以下几个步骤:1. 传感器感知船体的摇晃情况,将采集到的数据发送给计算机;2. 计算机根据传感器采集到的数据,通过控制算法计算出减摇装置的工作状态;3. 执行机构根据计算机的指令,调整减摇装置的工作参数;4. 减摇装置开始工作,水流通过减摇槽产生与船体摇晃方向相反的力,从而减小船体的摇晃幅度;5. 一段时间后,计算机重新采集船体的摇晃情况,并根据新的数据调整减摇装置的工作状态;6. 重复以上步骤,不断监测和调整减摇装置的工作状态,以保持船体的稳定性。
船用减摇装置通过水动力原理和控制原理的相互配合,能够有效减小船体的摇晃幅度,提高船舶的稳定性和航行安全性。
目前,船用减摇装置已广泛应用于各类大型船舶,如客船、油轮、货船等。
在未来,随着技术的不断发展,船用减摇装置的性能将进一步提升,为航行中的船舶提供更加稳定和安全的环境。
具体实验内容:格式样板如下,字体均用宋体。
(填空,每空1分,共25分)船舶摇摆实验1、实验目的(10)(1)测量实船的固有横摇周期。
(2)通过实验了解船舶重心对横摇周期的影响。
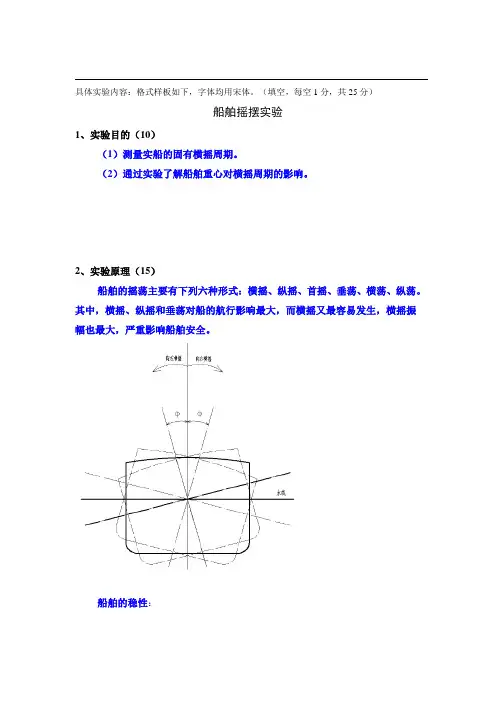
2、实验原理(15)船舶的摇荡主要有下列六种形式:横摇、纵摇、首摇、垂荡、横荡、纵荡。
其中,横摇、纵摇和垂荡对船的航行影响最大,而横摇又最容易发生,横摇振幅也最大,严重影响船舶安全。
船舶的稳性:横摇固有周期Ts:横摇摇幅衰减静水中通过对船舶施加倾斜力矩,使船舶产生初始倾角θ后,去除该力距,船舶进入自由横摇状态。
静水中船舶自由横摇的衰减曲线是按指数规律随时间而衰减的,相邻的两个横摇峰值或谷值之间的时间间隔即为横摇的固有周期Ts。
在半个周期时间间隔内,横摇幅值绝对值的变化为由以上关系可得无因次衰减系数的表达式为:3、实验步骤(10)1、确认所有实验设备处于正确的初始状态,包括:船舶(模)的摇摆运动不会受到干扰,倾角测量装置已上电并运行正常;2、每次实验前测量其初始倾角;3、运行倾角测量软件;4、给船舶施加倾斜力矩使其倾斜;5、点击倾角测量软件界面上的“开始”按钮,此时开始测量倾角数据并显示在界面上;6、去除倾斜力矩使船舶进入自由横摇状态;7、等待一定时间后,点击倾角测量软件界面上的“暂停”按钮,停止测量倾角数据;8、将记录下来的倾角数据保存在指定的文件中;9、在船舶的某一高度上增加重量。
首先将双面胶的一面贴在亚铁上,然后将亚铁粘贴到船模上。
注意沿船长的方向,亚铁的中心线要与船模的中线一致,避免船舶左右不对称产生固定的横倾角。
将增加重量的船模放入水中,给船模施加倾斜力矩使其倾斜,去除该力矩使船舶进入自由横摇状态,对船模摇摆的倾角进行测量并保存实验数据。
按照这个方法,逐渐增加亚铁的数量,并对其进行摇摆试验,测量其摇摆横倾角并保存数据;10、点击倾角测量软件界面上的“退出”按钮,关闭该软件,结束实验。
4、实验数据及其处理(40)根据测得的倾角数据绘制倾角随时间的变化曲线、船舶横摇消灭曲线,求实验船舶的横摇周期、无因次阻尼系数,并写出算例。
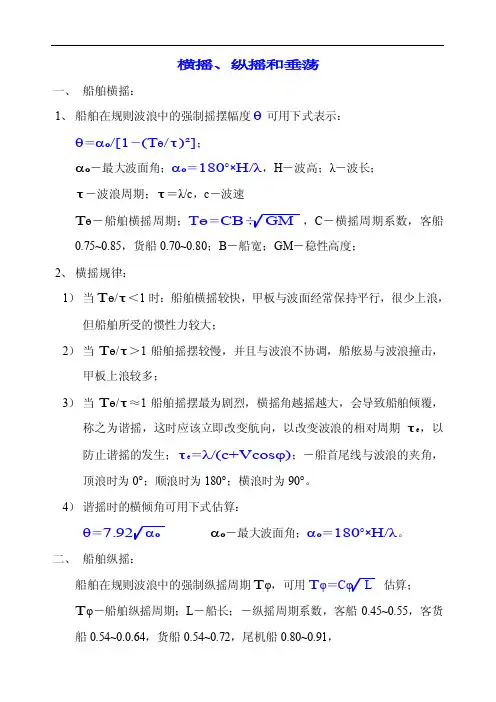
横摇、纵摇和垂荡一、船舶横摇:1、船舶在规则波浪中的强制摇摆幅度θ可用下式表示:θ=αο/[1-(Tө/τ)²];αο-最大波面角;αο=180°×H/λ,H-波高;λ-波长;τ-波浪周期;τ=λ/c,c-波速Tө-船舶横摇周期;Tө=CB÷GM ,C-横摇周期系数,客船0.75~0.85,货船0.70~0.80;B-船宽;GM-稳性高度;2、横摇规律:1)当Tө/τ<1时:船舶横摇较快,甲板与波面经常保持平行,很少上浪,但船舶所受的惯性力较大;2)当Tө/τ>1船舶摇摆较慢,并且与波浪不协调,船舷易与波浪撞击,甲板上浪较多;3)当Tө/τ≈1船舶摇摆最为剧烈,横摇角越摇越大,会导致船舶倾覆,称之为谐摇,这时应该立即改变航向,以改变波浪的相对周期τe,以防止谐摇的发生;τe=λ/(c+Vcosφ);-船首尾线与波浪的夹角,顶浪时为0°;顺浪时为180°;横浪时为90°。
4)谐摇时的横倾角可用下式估算:θ=7.92αοαο-最大波面角;αο=180°×H/λ。
二、船舶纵摇:船舶在规则波浪中的强制纵摇周期Tφ,可用Tφ=CφL估算;Tφ-船舶纵摇周期;L-船长;-纵摇周期系数,客船0.45~0.55,客货船0.54~0.0.64,货船0.54~0.72,尾机船0.80~0.91,三、垂荡:船舶垂荡周期T H可用T H=2.4 d 估算;d-船舶平均吃水。
四、容易产生拍底的条件有:1、λ/L≈1:会产生剧烈的拍底;海上波浪的波长在80~140之间,因此,如果船长在这个范围,则容易产生拍底现象;2、λ/L<5%:容易产生拍底;一般空船时严重,⅔载以上时,则不易发生;3、L /λ>1.3时,纵摇角较大;船长越大越趋于平稳;4、船舶对波浪的相对速度超过临界速度时,容易发生拍底;5、方形系数及菱形系数大的船舶,冲击力也大,U型船首V型船首相比,U型船首收拍击的次数多,强度也大。
2.5大风浪中的船舶操纵2.5.1恶劣天气下的船舶操纵及波浪概述知识点1:恶劣天气下的船舶操纵恶劣天气下的船舶操纵主要指大风浪中的船舶操纵。
船舶在海上航行,不但受到风、流的彫响,还受到波浪的影响。
大的波浪不但影响船舶的运行效率,而且还危及人命和船舶的安全。
为避免船舶在大风浪中的危险情况,需要了解风浪的特性、风浪对船舶的影响以及风浪中的操船。
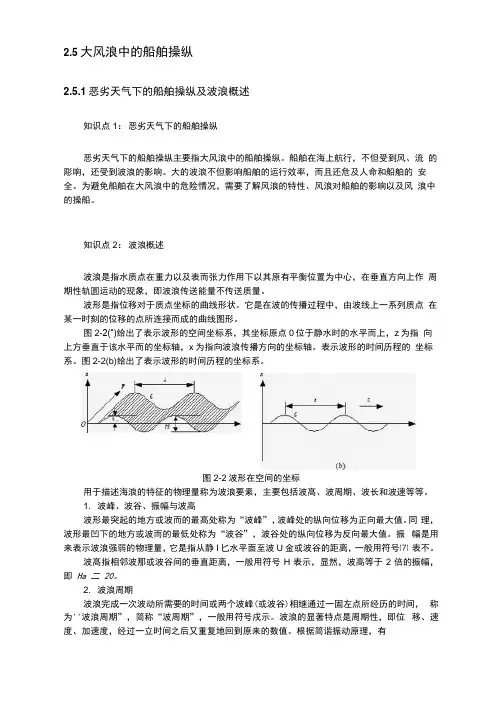
知识点2:波浪概述波浪是指水质点在重力以及表而张力作用下以其原有平衡位置为中心,在垂直方向上作周期性轨圆运动的现彖,即波浪传送能量不传送质量。
波形是指位移对于质点坐标的曲线形状。
它是在波的传播过程中,由波线上一系列质点在某一时刻的位移的点所连接而成的曲线图形。
图2-2(“)给出了表示波形的空间坐标系,其坐标原点0位于静水时的水平而上,z为指向上方垂直于该水平而的坐标轴,x为指向波浪传播方向的坐标轴。
表示波形的时间历程的坐标系。
图2-2(b)给出了表示波形的时间历程的坐标系。
图2-2波形在空间的坐标用于描述海浪的特征的物理量称为波浪要素,主要包括波髙、波周期、波长和波速等等。
1. 波峰、波谷、振幅与波高波形最突起的地方或波而的最髙处称为“波峰”,波峰处的纵向位移为正向最大值。
同理,波形最凹下的地方或波而的最低处称为“波谷”,波谷处的纵向位移为反向最大值。
振幅是用来表示波浪强弱的物理量,它是指从静I匕水平面至波U金或波谷的距离,一般用符号⑺ 表不。
波髙指相邻波那或波谷间的垂直距离,一般用符号H表示,显然,波高等于2倍的振幅,即Ha 二 20。
2. 波浪周期波浪完成一次波动所需要的时间或两个波峰(或波谷)相继通过一固左点所经历的时间,称为''波浪周期”,简称“波周期”,一般用符号戌示。
波浪的显著特点是周期性,即位移、速度、加速度,经过一立时间之后又重复地回到原来的数值。
根据简谐振动原理,有T二 2曲3其中,0为“角频率”,也称波浪频率。
3. 波速波速指波传播的速度,一般用符号c表示。
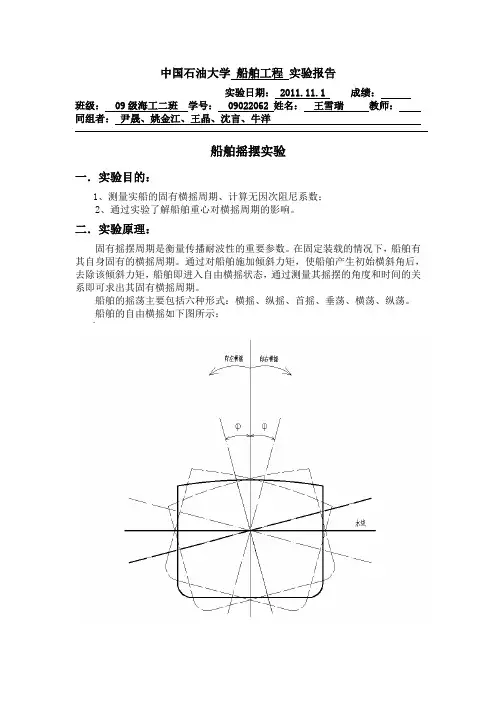
中国石油大学船舶工程实验报告实验日期: 2011.11.1 成绩:班级: 09级海工二班学号: 09022062 姓名:王雪瑞教师:同组者:尹晟、姚金江、王晶、沈言、牛洋船舶摇摆实验一.实验目的:1、测量实船的固有横摇周期、计算无因次阻尼系数;2、通过实验了解船舶重心对横摇周期的影响。
二.实验原理:固有摇摆周期是衡量传播耐波性的重要参数。
在固定装载的情况下,船舶有其自身固有的横摇周期。
通过对船舶施加倾斜力矩,使船舶产生初始横斜角后,去除该倾斜力矩,船舶即进入自由横摇状态,通过测量其摇摆的角度和时间的关系即可求出其固有横摇周期。
船舶的摇荡主要包括六种形式:横摇、纵摇、首摇、垂荡、横荡、纵荡。
船舶的自由横摇如下图所示:`当船倾斜时,受到由外力引起的倾斜力矩和自身的复原力矩,如下图:倾斜角度随时间的变化曲线(时历曲线)如下图所示:船舶横摇的摇幅衰减情况可以这样表示:将相邻的两个摇幅依次相减,求出每次摆动中的衰减角 摆至另一边的摇幅已减少,即为:再将一次摆动的摇幅平均,得到代表这次摆动幅度大小的平均摇幅将对应的 及 绘制在坐标纸上,横坐标 ,纵坐标 。
得到的曲 线即为横摇消灭曲线,代表了横摇衰减的情况,也表示了阻尼的情况。
在半个周期时间间隔内,横摇幅值绝对值的变化为:由以上关系可得无因次衰减系数的表达式为:三.实验设备与仪器:k θ1k +θ1k k +-=∆θθθm θ21k k m++=θθθmθθ∆m θθ∆μπθθ-+=ek1k k1k ln 1θθπμ+=1.实验用船舶(模);2.倾角测量装置(包括倾角传感器,接口和连线,数据采集计算机)。
四.实验步骤:1、确认所有实验设备处于正确的初始状态,包括:船舶(模)的摇摆运动不会受到干扰,倾角测量装置已上电并运行正常;2、运行倾角测量软件;3、给船舶施加倾斜力矩使其倾斜;4、点击倾角测量软件界面上的“开始”按钮,此时开始测量倾角数据并显示在界面上;5、去除倾斜力矩使船舶进入自由横摇状态;6、等待一定时间后,点击倾角测量软件界面上的“暂停”按钮,停止测量倾角数据;7、将记录下来的倾角数据保存在指定的文件中;8、在船舶的某一高度上增加重量。
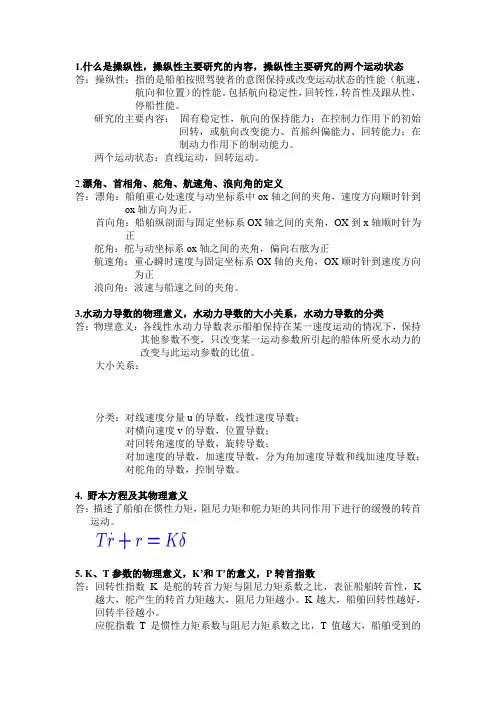
1.什么是操纵性,操纵性主要研究的内容,操纵性主要研究的两个运动状态答:操纵性:指的是船舶按照驾驶者的意图保持或改变运动状态的性能(航速、航向和位置)的性能。
包括航向稳定性,回转性,转首性及跟从性,停船性能。
研究的主要内容:固有稳定性,航向的保持能力;在控制力作用下的初始回转,或航向改变能力、首摇纠偏能力、回转能力;在制动力作用下的制动能力。
两个运动状态:直线运动,回转运动。
2.漂角、首相角、舵角、航速角、浪向角的定义答:漂角:船舶重心处速度与动坐标系中ox轴之间的夹角,速度方向顺时针到ox轴方向为正。
首向角:船舶纵剖面与固定坐标系OX轴之间的夹角,OX到x轴顺时针为正舵角:舵与动坐标系ox轴之间的夹角,偏向右舷为正航速角:重心瞬时速度与固定坐标系OX轴的夹角,OX顺时针到速度方向为正浪向角:波速与船速之间的夹角。
3.水动力导数的物理意义,水动力导数的大小关系,水动力导数的分类答:物理意义:各线性水动力导数表示船舶保持在某一速度运动的情况下,保持其他参数不变,只改变某一运动参数所引起的船体所受水动力的改变与此运动参数的比值。
大小关系:分类:对线速度分量u的导数,线性速度导数;对横向速度v的导数,位置导数;对回转角速度的导数,旋转导数;对加速度的导数,加速度导数,分为角加速度导数和线加速度导数;对舵角的导数,控制导数。
4. 野本方程及其物理意义答:描述了船舶在惯性力矩,阻尼力矩和舵力矩的共同作用下进行的缓慢的转首运动。
5. K、T参数的物理意义,K’和T’的意义,P转首指数答:回转性指数K是舵的转首力矩与阻尼力矩系数之比,表征船舶转首性,K 越大,舵产生的转首力矩越大,阻尼力矩越小。
K越大,船舶回转性越好,回转半径越小。
应舵指数T 是惯性力矩系数与阻尼力矩系数之比,T值越大,船舶受到的惯性力矩越大,阻尼力矩越小;T>0说明船舶具有直线稳定性,且T越小,稳定性越好。
K`是K的无因次量,也表征船舶回转性。
舰船海况模拟平台等效摇摆参数研究随着海洋科学技术的不断发展,舰船海况模拟平台已经成为了模拟、研究和设计舰船的重要工具。
在船舶海况模拟的过程中,平台的等效摇摆参数是一个非常重要的指标。
因为等效摇摆参数可以帮助人们确定船舶在波浪中的运动特性,了解船舶的稳定性和安全性。
等效摇摆参数可以分成两个部分:垂浪摆幅和摇摆周期。
垂浪摆幅指船舶在实际的海浪中,发生垂直方向上的振动幅度。
而摇摆周期则是指船舶摇摆一次所需要的时间。
这两个参数的大小和数值,可以直接反映出船舶在波浪中的稳定性和安全性。
船舶在不同的海况下,其等效摇摆参数也会有所不同。
一般来说,船舶在大波浪中的等效摇摆参数会相对较大,而在小波浪中则会比较小。
因此,人们需要在海况模拟平台上进行相关研究,以便确定船舶在不同海况下的等效摇摆参数。
通过对海况模拟平台上的测试,可以发现船舶的等效摇摆参数是受多个因素影响的。
其中最为关键的是海浪的高度、周期和方向。
此外,船舶自身的特性也会对等效摇摆参数产生影响。
比如船舶的自由板子和下载板子、上甲板的防雨甲板等。
综上所述,舰船海况模拟平台等效摇摆参数是船舶稳定性和安全性研究中不可缺少的一部分。
通过平台上各种测试,人们可以更好地了解船舶在不同海况下的等效摇摆参数,为船舶的稳定性和安全性提供更充分的保障。
在船舶海况模拟平台等效摇摆参数研究中,人们通过对各种测试数据进行分析,可以更好地理解和了解船舶在不同海况下的稳定性和安全性。
以下是一些与等效摇摆参数相关的数据及其分析:1. 海浪高度对等效摇摆参数的影响:在海浪高度为0.5米和1.0米的情况下,测试发现船舶的等效摇摆参数相对较小,而在海浪高度为1.5米和2.0米的情况下,等效摇摆参数则有所增加。
这是因为海浪的高度越大,其能量越强,船舶的运动也就越大。
因此,船舶在大波浪中的等效摇摆参数通常会相对较大。
2. 海浪周期对等效摇摆参数的影响:测试发现,在不同的海浪周期下,船舶的等效摇摆参数也会有所差异。
船舶运动的六个自由度介绍船舶在水中运动时,可以发生六个不同的自由度的运动。
这些自由度是指船舶顺、横、纵向的运动自由度以及绕三个轴的旋转自由度。
本文将详细介绍船舶运动的六个自由度,并探讨其对船舶的影响。
顺向运动自由度顺向运动自由度是指船舶在纵向方向上的运动能力。
主要包括以下几个方面: 1. 船舶的前后运动:船舶可以根据需要前进或后退,实现前后运动的能力对于船舶的动力性能和操纵性能至关重要。
2. 船舶的加速和减速:船舶可以通过增大或减小推力来改变速度,从而实现加速和减速。
加速和减速的能力对于船舶的运输效率和安全性都非常重要。
3. 船舶的停止和启动:船舶可以通过完全停止推力来停止。
启动时,船舶需要进行一系列动作,包括开始推进、瓦解锚定等。
横向运动自由度横向运动自由度是指船舶在横向方向上的运动能力。
主要包括以下几个方面: 1. 船舶的左右移动:船舶可以根据需要左右移动,实现在水中的横向运动。
这对于船舶的横向稳定性和操纵性是很重要的。
2. 船舶的横摆运动:船舶可以进行左右摇摆运动,这对于船舶的横向稳定性和舒适性有着重要的影响。
3. 船舶的横向加速和减速:船舶可以通过改变横向推力大小和方向来实现横向加速和减速。
纵向运动自由度纵向运动自由度是指船舶在纵向方向上的运动能力。
主要包括以下几个方面: 1. 船舶的上下浮动:船舶可以在水中上下浮动,这是由于船舶的浮力和重力之间的平衡关系。
2. 船舶的纵摇运动:船舶可以进行前后摇摆运动,这对于船舶的纵向稳定性和舒适性有着重要的影响。
3. 船舶的纵向加速和减速:船舶可以通过改变纵向推力大小和方向来实现纵向加速和减速。
绕横纵向轴的旋转自由度绕横纵向轴的旋转自由度是指船舶围绕横向轴和纵向轴的旋转能力。
主要包括以下几个方面: 1. 船舶的滚动:船舶可以绕横向轴进行滚动运动,即船舶一侧升起而另一侧下沉。
滚动对于船舶的稳定性和舒适性有着重要影响。
2. 船舶的俯仰:船舶可以绕纵向轴进行俯仰运动,即船舶的船头上沉或下沉。
船舶的动态姿态与姿态控制一、前言与背景船舶的动态姿态与姿态控制是船舶工程领域的一个重要分支,其起源和发展与人类航海活动密切相关。
自古以来,船舶的姿态控制就是航海技术的一个重要组成部分,关系到船舶的稳定性和航行安全。
随着航海技术的不断发展,船舶的规模和复杂性也在不断提高,对动态姿态与姿态控制的要求也随之增强。
船舶的动态姿态与姿态控制研究的重要性和现实意义体现在多个方面。
首先,对于提高船舶的航行安全具有重要意义,通过精确控制船舶的姿态,可以有效避免船舶在恶劣海况下的倾覆和碰撞事故。
其次,对于提高船舶的运输效率和节能减排也有重要影响,通过优化船舶的姿态,可以减少船体的阻力,提高航行的速度和燃油效率。
此外,船舶的姿态控制技术还可以应用于船舶的自动化和智能化控制,提高船舶的操作性和驾驶安全性。
二、核心概念与分类船舶的动态姿态与姿态控制涉及到一些核心概念,需要进行清晰的界定。
首先,动态姿态指的是船舶在航行过程中,由于各种因素(如风力、海流、船体结构等)的影响,船体产生的倾斜、摇摆和偏移等姿态变化。
姿态控制则是指通过各种控制手段(如舵控制、主机控制等)对船舶的姿态进行调整和控制,以达到预期的航行效果。
船舶的动态姿态与姿态控制可以分为几个不同的类别,根据控制对象和控制目的的不同,可以分为船体姿态控制、船舶动力系统控制、船舶操纵系统控制等。
船体姿态控制主要是指对船舶的倾斜和摇摆进行控制,以提高船舶的稳定性和安全性。
船舶动力系统控制则是指对船舶的推进系统和能源系统进行控制,以提高船舶的运输效率和节能减排。
船舶操纵系统控制则是指对船舶的舵和主机进行控制,以实现船舶的精确操控和航行安全。
船舶的动态姿态与姿态控制与其他相关领域(如海洋工程、流体力学、自动化控制等)有着密切的联系和交叉。
例如,海洋工程的研究可以为船舶的姿态控制提供海洋环境的数据和模型,流体力学的研究可以为船舶的动态姿态控制提供船体受力分析和稳定性评估的理论基础,自动化控制的研究可以为船舶的姿态控制提供先进的控制算法和系统设计方法。
船舶减小摇摆的方法嘿,朋友们!咱今天来聊聊船舶减小摇摆这档子事儿。
你说这船在水上漂啊,那摇摆起来可真让人有点晕乎呢!就像咱人走路有时候也会打晃一样。
那怎么让船不那么摇摆呢?这就好比咱骑自行车,得掌握好平衡呀!首先呢,得把货物给放好咯。
你想啊,如果货物都堆得乱七八糟的,船能稳当吗?就像你背个书包,里面东西晃来晃去,你走路能舒服吗?所以合理地摆放货物,让船的重心稳稳的,这可是很关键的一步哟!还有啊,船的设计也很重要呢!这就跟咱挑鞋子一样,得合脚舒服呀。
一个好的船舶设计,就像是给船穿上了一双合脚的鞋,能让它在水上走得更稳当。
那些线条呀,结构呀,都得精心琢磨,可不能马虎。
再说说驾驶技术吧。
船长就好比是船的老大,得有一手好本事才能驾驭得了呀!开船的时候得有分寸,不能瞎晃悠。
遇到风浪该怎么应对,那都得心里有数。
这就好像咱开车遇到拐弯,得稳稳地打方向盘不是?咱再想想,是不是可以给船装上一些特别的装置呢?就像给人戴上护具一样。
比如说减摇鳍,这玩意儿就像是船的小翅膀,能帮着船保持平衡呢。
还有其他的一些设备,都能在关键时刻发挥大作用。
嘿,你说要是船不摇摆了,那在船上的人得多舒服呀!不用再担心晃来晃去晕船啦。
大家可以安心地欣赏海景,享受旅途。
这多好呀!其实啊,让船舶减小摇摆就像是一场和风浪的战斗。
我们得有策略,有方法,还得有勇气去应对。
只有这样,我们的船才能在水上稳稳地航行,带着我们驶向想去的地方。
所以呀,大家可别小瞧了这些方法,它们可都是让船乖乖听话的法宝呢!咱可得好好研究研究,让我们的航行更加安全、舒适。
你说是不是这个理儿呢?。
船舶的摇摆控制大型集装箱船首部与尾部的形状差别很大,所以当船舶在波浪区域航行,沿船长方向出现波峰和波谷时,很容易导致船舶扶正力臂的变化,故要特别关注船舶的摇摆参数-周期和幅度,一艘船的扶正力矩是扶正力臂与总重量的乘积。
船舶在顺水或逆水前进时,其横摇和纵倾是呈周期性的变化,其扶正力臂也呈周期性的变化。
正是因为这种现象,导致船舶的扶正力矩也随之发生变化,从而引发了船舶的摇摆。
而这种以时间为变量参数的摇摆,如果遇上合适的海浪情况,就有可能引发船舶共振现象,这时船舶的摇摆角度加大,导致货物和集装箱的灭失,极端的情况下,可能使船体结构遭受破坏。
最近几年来,集装箱船的事故,就反映出这种现象的危险性。
人们都知道一个现象,船舶在低速航行时,如果恰巧在某一时间操舵、遇到阵风或其它因素的影响时而引起船舶附近的波浪发生变化,当其频率较低时(仅为船舶自身摇摆周期的一半),有可能导致船舶摇摆的角度很大。
对大型集装箱船,在一定的海况下就有可能产生周期性的摇摆,如在北太平洋和北大西洋一年中分别有9%和12%时间里存在着导致这种现象发生的海况。
实事上,如果在船舶上安装一个减摇系统,适时地给船舶外加一个恰当的阻尼,来抵消船舶扶正力矩的变化,摇摆是可以加以预防的。
德国的Interring公司生产的IPRP装置就是这种想法在实船上的应用。
这套装置采用众所周知的自控式减摇水舱技术,其核心部分是减摇水舱系统。
两个水舱分别布置于船舶的左右舷,在船体上设置一个通道,将两个水舱相互连通,形成U型水舱。
减摇水舱中充入一定量的水,注水量应根据水舱形状、船舶装载情况和航线情况来确定。
其原理是使水舱内的水的运动周期和船舶在波浪上的摇摆周期相近,保证在船舶摇摆时,两个液舱能形成一定的水位差,以便形成一个扶正力矩,以扶正力矩抵消波浪所产生的倾斜力矩,达到减小船舶的摇摆幅度。
一套典型的船舶IPRP系统应由几对液舱、一个气动的空气阀和一套控制单元组成,控制单元中包括船舶纵倾和横摇传感器。
海况等级与舰船摇摆幅度国军标海况等级与舰船摇摆幅度国军标摇晃是海上航行中不可避免的现象,特别是在恶劣的海况下。
舰船摇摆幅度对于船体的稳定性和乘员的安全都有着重要影响。
因此,国际海事组织(IMO)制定了一系列的海况等级和舰船摇摆幅度国际标准,以指导船舶在不同海况下的安全操作。
IMO制定的关于海况等级和舰船摇摆幅度的国际标准主要包括以下几个方面:1.海况等级:根据海况的不同程度,IMO将海况等级分为0-9级。
其中,0级表示海面如镜,完全平静;1级表示海面有波浪,但波高较低,一般不会影响船舶的航行;2级表示波高逐渐增大,船舶会有轻微的摇晃感;3级及以上的海况则会造成较强的摇晃和颠簸,可能对船舶的稳定性和乘员的安全造成影响。
2.舰船摇晃幅度国军标:IMO对舰船摇晃幅度进行了详细的规定,其中最常用的有以下两个指标:- GM:即船舶的动稳性,表示舰船在受到外部作用力时,回复到平衡状态所需的时间和摇晃的幅度。
GM值越大,舰船的稳定性越好,抵抗外部作用力的能力越强。
- RMS:即舰船的摇晃幅度,表示船舶在摇晃过程中产生的最大偏离角度。
RMS值越小,船舶的摇晃幅度越小,船体稳定性越好。
为了保证船舶的安全性和乘员的舒适度,各国根据IMO的国际标准制定了相应的国内军标,对舰船摇晃幅度进行具体规定。
这些国军标根据具体舰船的类型和用途,以及实际的海况情况制定。
例如,对于商船来说,一般要求GM值大于0.35m,RMS值小于10°;而对于军舰来说,要求更为严格,GM值通常要求大于0.5m,RMS值小于5°。
此外,一些国家还会制定针对特殊海况的国际军标。
例如,对于南海和东海等风浪较大的地区,舰船在海上行驶时面临较大的挑战。
因此,一些国家会制定相应的国军标,要求舰船在这些海区的航行中,GM值和RMS值必须达到更高的标准,以确保船舶的稳定性和乘员的安全。
总结起来,海况等级和舰船摇摆幅度国军标是指导船舶安全行驶的重要规范。
六级海况船舶横纵摇
ROLL横摇:横摇最简单理解,大家做船,船舶左右摇晃,一般都是横摇现象。
横摇也是威胁船舶安全的最主要因素。
船舶在海上最容易发生横摇且摇摆幅度最大,对船舶的使用和安全、船员生活与工作有严重影响。
SWAY横荡:横荡是指浸于水中的物体沿最长延展方向的垂直方向的水平线性振荡运动。
PITCH纵摇:纵摇是船体绕横轴的回转振荡运动。
船舶因纵摇运动而遭致的不利后果有:同等功率下的失速、严重的结构损伤、船员晕船症。
SURGE纵荡:纵荡是指浸于水中的物体沿最长延展方向的水平线性振荡运动。
YAW首摇:首摇是指浸于水中的物体绕船体垂直轴的旋转振荡运动。
通常,可以把这种船舶的艏摇运动视为除了操舵不良外,还由下列三个因素引起的结果:船体上的静压力不平衡、海浪中水的轨圆运动、陀螺作用。
HEAVE垂荡:浸于水中的物体沿垂直方向的线性振荡运动称为“垂荡”。
船舶的摇摆控制
大型集装箱船首部与尾部的形状差别很大,所以当船舶在波浪区域航行,沿船长方向出现波峰和波谷时,很容易导致船舶扶正力臂的变化,故要特别关注船舶的摇摆参数-周期和幅度,一艘船的扶正力矩是扶正力臂与总重量的乘积。
船舶在顺水或逆水前进时,其横摇和纵倾是呈周期性的变化,其扶正力臂也呈周期性的变化。
正是因为这种现象,导致船舶的扶正力矩也随之发生变化,从而引发了船舶的摇摆。
而这种以时间为变量参数的摇摆,如果遇上合适的海浪情况,就有可能引发船舶共振现象,这时船舶的摇摆角度加大,导致货物和集装箱的灭失,极端的情况下,可能使船体结构遭受破坏。
最近几年来,集装箱船的事故,就反映出这种现象的危险性。
人们都知道一个现象,船舶在低速航行时,如果恰巧在某一时间操舵、遇到阵风或其它因素的影响时而引起船舶附近的波浪发生变化,当其频率较低时(仅为船舶自身摇摆周期的一半),有可能导致船舶摇摆的角度很大。
对大型集装箱船,在一定的海况下就有可能产生周期性的摇摆,如在北太平洋和北大西洋一年中分别有9%和12%时间里存在着导致这种现象发生的海况。
实事上,如果在船舶上安装一个减摇系统,适时地给船舶外加一个恰当的阻尼,来抵消船舶扶正力矩的变化,摇摆是可以加以预防的。
德国的Interring公司生产的IPRF装置就是这种想法在实船上的应用。
这套
装置采用众所周知的自控式减摇水舱技术,其核心部分是减摇水舱系统。
两个水舱分别布置于船舶的左右舷,在船体上设置一个通道,将两个水舱相互连通,形成U 型水舱。
减摇水舱中充入一定量的水,注水量应根据水舱形状、船舶装载情况和航线情况来确定。
其原理是使水舱内的水的运动周期和船舶在波浪上的摇摆周期相近,保证在船舶摇摆时,两个液舱能形成一定的水位差,以便形成一个扶正力矩,以扶正力矩抵消波浪所产生的倾斜力矩,达到减小船舶的摇摆幅度。
一套典型的船舶IPRP系统应由几对液舱、一个气动的空气阀和一套控制单元
组成,控制单元中包括船舶纵倾和横摇传感器。
这种系统可有效预防船舶横摇,并可以减小船舶横摇幅度。
但是IPRP系统因其减摇舱较小,所以在船舶遇到横波的情况下,其减摇效果还不如常规的U 型减摇水舱效果好。
所以旅游船可以采用复合式减摇系统,在高速航行时,主要采用减摇鳍装置,而减摇水舱用于其它航行状态。
主动式减摇鳍系统是由一对或多对翼形鳍组成,它们装设在船的压载区,可借船内的操纵机构将其转动,以调整迎水角度。
减摇鳍迎水的角度决定了产生其向上或向下作用力,以减少摇摆幅度。
控制系统的传感器布置在船舶的水平龙骨上,用以测量船舶摇摆的幅度,并将信号反馈回控制系统,以操纵液压缸,调整减摇鳍的迎水角度。
与未装减摇系统的船舶相比,采用这种减摇系统后,船舶的摇摆幅度可降低80-90%。
罗尔斯罗伊斯集团下属的布朗兄弟公司在过去的12年里,已有90套该公司的Neptune 型可折叠式减摇鳍安装于商船或军船上。
去年有一套安装在爱尔兰渡轮公司的5.1万总吨的Ulysses号渡船上;另有4套将安装在目前世界上最大的游船“玛丽2世王后”号上。
布朗兄弟公司的Neptune减摇鳍以其良好的性能和较低的费用而在造船界闻名,该型产品在民用船舶中得到大量的使用,其中包括游船、渡船和集装箱船。
新型的Neptune 产品具有以下优点:
鳍和其它设备无需进坞维修,所以在使用期内,其维修费用很低;
由于采用大升力的减摇鳍,具有较好的减摇性能;
该减摇器可方便地与船上的报警和监控系统集成;
结构紧凑对安装空间要求不大。
新Neptune 减摇鳍装置中,采用了许多新技术:
液压油缸的柱塞采用了独特的斜布置方式,可以在现场对液压缸和密封装
置进行维护,而不必对整个系统进行拆卸柱塞或等待进坞维修;
对关键部件进行了简化;
改进了液压和润滑系统的控制,将两路控制改由一套油路控制;
大大减轻了装置的重量,与早期产品相比,重量减轻了10%;
为了提高工作的可靠性,新的减摇鳍设置了锁定装置。
最大程度地减少了运动部件,采用复合轴承、三道主密封、低噪液压系统
等。
系统装设了负载感应器,以降低对功率的需求。
为了简化安装工作,所有的动力单元全部布置在一起。
布朗公司开发了一款不带折翼的新型减摇鳍,其形状类似于鱼尾,性能与
襟翼鳍类似。
该减摇装置采用了触屏控制系统,简化了操作,并可提供全面维护和故障信息。
控制系统布置在驾驶室和机控室内。
同时采用可编程序控制器将减摇系统与船舶其它集成在一起。
减摇鳍的减摇效果随着船速的降低而降低,而在低速航行或一定工况下,
减摇水舱却可以发挥作用。
所以游船大多采用复合式减摇系统,在船舶高速航
行时主要采用减摇鳍装置,而在其它航行状态时,采用减摇水舱系统,以确保船舶的减摇效果。
据报道,斯普利公司的新一代Gyrofin 减摇系统的减摇效果可达90%以上,
可以极大提高船舶的安全性、乘客的舒适性和对货物的保护,并可降低燃油消耗率和货物的损坏率。
目前,Gyrofin系统已经安装在由日本三菱重工为P&0公司建造的2条
25206 总吨的客滚船European Causeway号和European Ambassador号上,并已经在爱尔兰航线运营。
据斯普利船用设备公司介绍,该系统的主要优势在于:
改进了升力控制器性能,提高了减摇效率,延长了机械寿命。
升力控制系统可看作尾襟翼,改进船舶的升阻比,降低阻力,节省燃油。
采用数字控制系统和触屏式控制系统。
采用先进的机械元件,提高装置性能。
减摇鳍的轴内装备了位移传感器,配合升力控制系统。
位移传感器将位移量按比例转换成电信号,根据水流方向,调整鳍面迎水的角度和面积,来控制升浮力的大小。
动态的升力信号与减摇系统设定值进行比较,并通过对减摇鳍工作状态的调整,对偏差量不断进行修正,直到达到规定的范围。
虽然流经鳍面的水流是不断变化的,而调整过程是减摇系统根据当时的水流情况自动进行的。
减摇鳍的迎水角度也是不断变化时,直到达到理想的工作状况。
升浮控制系统可以有效防止减摇鳍在某一时间因压力的变化而导致出现空泡现象,而在另一个时段出现失速现象。
当减摇鳍在非空泡区工作时,采用升力控制系统的减摇鳍的升力要求达到峰值,而没有配备升力控制系统的减摇鳍由于其工作状态的不断变化,就不能保持其升力的峰值。
所以与其它减摇鳍相比,配备了升力控制系统的减摇鳍可以使其鳍的效率达到最高。
在船桥控制中心设置大型的液晶显示器和触屏控制系统。
为提高控制系统的性能和减少布线的工作量,采用串行数据传送的方式,
该控制系统可同时对 4 套减摇装置进行操纵。
为了提高系统的可靠性,该减摇装置采用了新型的摇摆传感器,这种传感器中没有可移动部件,主要是用感应器来代替机械式开关。
为了保证在驾驶室操纵系统失效时,仍可对减摇装置进行操纵,主控室中也设置了操纵装置。
该系统的故障检测系统十分灵敏,在驾驶控制台设置了快速检测装置,可对整个系统进行检测。
每套减摇鳍均设有一台辅助泵,其驱动电机与船舶的应急供电电源相连,这样可满足SOLAS公约对游船的要求。
减摇鳍的应急驱动装置由控制站或自动工作模
式来启动。