三相逆变器的建模
- 格式:doc
- 大小:1.91 MB
- 文档页数:9
三相电压型变流器的建模及双闭环控制系统设计探究摘要:随着电力系统的进步,对电能质量的要求也越来越高,而三相电压型变流器在电力系统中的应用越来越广泛。
本文主要对三相电压型变流器进行了建模探究,并设计了一种双闭环控制系统,以提高其性能和稳定性。
一、引言随着电力负载的增加和电力系统对质量要求的提高,电力质量问题已成为电力系统探究的重要方向。
而电力质量问题中,电压波动和谐波问题是较为常见的。
三相电压型变流器作为一种电力质量控制装置,在电力系统中有着广泛的应用。
因此,对其建模和控制算法的探究具有重要意义。
二、三相电压型变流器的建模1. 变流器的基本原理三相电压型变流器主要由整流器和逆变器两部分组成。
通过控制整流器和逆变器的开关管,可以实现直流电源到沟通电源的转换。
2. 整流器的建模整流器的主要功能是将三相沟通电源输出的电能转换为直流电能。
接受p-q理论对整流器进行建模,推导出整流器的电流方程。
3. 逆变器的建模逆变器的主要功能是将直流电能转换为沟通电能。
依据逆变器的输出电流和电压之间的干系,推导出逆变器的电流方程。
三、双闭环控制系统设计1. 控制系统的基本结构双闭环控制系统包括外环控制和内环控制两部分。
外环控制是对输出电流进行控制,内环控制是对输出电压进行控制。
2. 外环控制设计接受PID控制器对输出电流进行控制。
依据变流器的电流方程和控制目标,设计PID控制器的参数,并通过仿真验证其性能和稳定性。
3. 内环控制设计接受PI控制器对输出电压进行控制。
依据逆变器的电流方程和控制目标,设计PI控制器的参数,并通过仿真验证其性能和稳定性。
四、仿真结果及分析通过Matlab/Simulink软件进行仿真试验,对三相电压型变流器进行性能测试。
通过对比不同控制方案下的输出电流和电压波形,以及控制参数的变化,分析双闭环控制系统的性能。
五、结论本文针对三相电压型变流器进行了建模探究,并设计了一种双闭环控制系统。
通过仿真试验验证了控制系统的性能和稳定性。
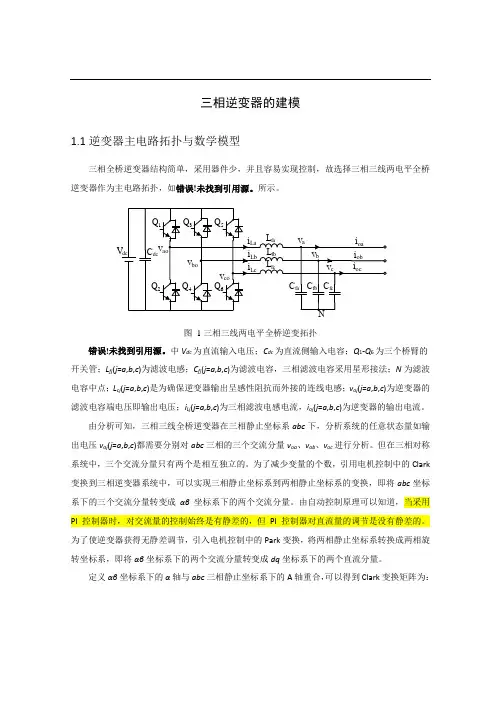
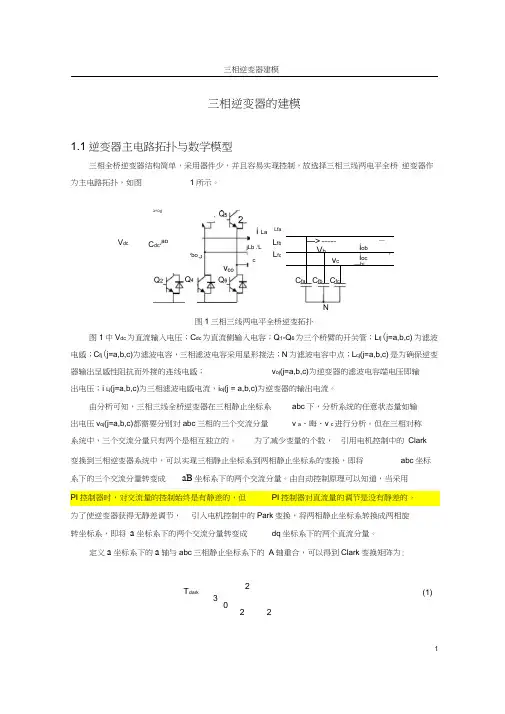
三相逆变器的建模1.1逆变器主电路拓扑与数学模型三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥逆变器作为主电路拓扑,如错误!未找到引用源。
所示。
图1三相三线两电平全桥逆变拓扑错误!未找到引用源。
中V dc为直流输入电压;C dc为直流侧输入电容;Q1-Q6为三个桥臂的开关管;L fj(j=a,b,c)为滤波电感;C fj(j=a,b,c)为滤波电容,三相滤波电容采用星形接法;N为滤波电容中点;L cj(j=a,b,c)是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj(j=a,b,c)为逆变器的滤波电容端电压即输出电压;i Lj(j=a,b,c)为三相滤波电感电流,i oj(j=a,b,c)为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系abc下,分析系统的任意状态量如输出电压v oj(j=a,b,c)都需要分别对abc三相的三个交流分量v oa、v ob、v oc进行分析。
但在三相对称系统中,三个交流分量只有两个是相互独立的。
为了减少变量的个数,引用电机控制中的Clark 变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将abc坐标系下的三个交流分量转变成αβ坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终是有静差的,但PI控制器对直流量的调节是没有静差的。
为了使逆变器获得无静差调节,引入电机控制中的Park变换,将两相静止坐标系转换成两相旋转坐标系,即将αβ坐标系下的两个交流分量转变成dq坐标系下的两个直流分量。
定义αβ坐标系下的α轴与abc三相静止坐标系下的A轴重合,可以得到Clark变换矩阵为:11122230ClarkT ⎡⎤--⎢⎥⎢=⎢⎢⎣ (1)两相静止坐标系αβ到两相旋转坐标系dq 的变换为Park 变换,矩阵为:cos()sin()sin()cos()Park t t T t t ωωωω⎡⎤=⎢⎥-⎣⎦(2)对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为:cos()cos(2/3)cos(2/3)a mb mc m u U t u U t u U t ωωπωπ==-=+ (3)经过Clark 和Park 后,可以得到:d m q u U u == (4)由式错误!未找到引用源。
三相SPWM逆变器的调制建模和仿真详解随着电力电子技术的发展,SPWM正弦脉宽调制法正逐渐被人们熟悉,这项技术的特点是通用性强,原理简单。
具有开关频率固定,控制和调节性能好,能消除谐波,设计简单,是一种比较好的波形改善法。
它的出现为中小型逆变器的发展起了重要的推动作用。
由于大功率电力电子装置的结构复杂,若直接对装置进行实验,且代价高费时费力,故在研制过程中需要借助计算机仿真技术,对装置的运行机理与特性,控制方法的有效性进行试验,以预测并解决问题,缩短研制时间。
MATLAB软件具有强大的数值计算功能,方便直观的Simulink建模环境,使复杂电力电子装置的建模与仿真成为可能。
本文利用MATLAB/Simulink为SPWM逆变电路建立系统仿真模型,并对其输出特性进行仿真分析。
首先介绍的是三相电压型桥式逆变电路原理,其次阐述了SPWM逆变器的工作原理及特点,最后详细介绍了三相电压源SPWM逆变器的建模与仿真结构,具体的跟随小编一起了解一下。
一、三相电压型桥式逆变电路三相电压型桥式逆变电路如图1所示,电压型三相桥式逆变电路的基本工作方式也是180导电方式,即每个桥臂的导电角度为180,同一相上下2个桥臂交替导电,各相开始导电的角度依次相差120。
这样,在任一瞬间,将有3个桥臂同时导通。
可能是上面一个臂下面2个臂,也可能是上面两个臂下面一个臂同时导通。
因为每次换流都是在同一相上下两个桥臂之间进行的,因此也被称为纵向换流。
当urU》uc时,给上桥V1臂以导通信号,给下桥臂V4以关断信号,则U相相对于电源假想中点N的输出电压uUN=Ud/2。
当urU《uc时,给V4导通,给V1关断,则uUN=Ud/2。
V1和V4的驱动信号始终是互补的。
当给V1(V4)加导通信号时,可能是V1(V4)导通,也可能是二极管VD1(VD4)续流导通。
二、SPWM逆变器的工作原理及特点SPWM,他是根据面积等效原理,PWM波形和正弦波是等效的,对于正弦波的负半周,也可以用同样的方法得到PWM波形。

* * * 学 院本科毕业设计(论文)作者姓名 指导教师学科门类 所学专业 题 目代分类号学号 密级 提交论文日期成绩评定 Voltage-source SPWM Inverter电压型三相逆变器就是供给逆变器的交流电源是三相电电源, SPWM正弦脉宽调制法这项技术的特点是原理简单,通用性强,具有开关频率固定,控制和调节性能好,使输出电压只含有固定频率的高次谐波分量,并能够消除谐波,且设计简单等一系列的优点,SPWM 正弦脉宽调制法是一种比较好的波形改善的方法。
SPWM正弦脉宽调制法的出现为中型和小型逆变器的快速发展起到了一个重要的推动作用。
伴随着电力电子技术的高速发展,电压型三相SPWM逆变器已被广泛应用在各个领域之中,并且SPWM技术已经成为目前应用最为广泛的逆变用PWM技术。
通过电压型三相SPWM逆变器建模和仿真研究这项课题,能够加强自己对电压型三相SPWM逆变器控制原理和建模进行深入理解,并提高自己在三相电压逆变方面的计算机仿真能力,为今后自己从事交流电机控制与电源逆变相关工作打下良好的基础。
关键词:电压型;频率;SPWM;逆变器The AC power supply voltage three-phase inverter is supplied to the inverter is three-phase electric power supply, the technology of SPWM sine pulse width modulation method is simple in principle, strong versatility, with fixed switching frequency, control and regulation performance, so that the output voltage harmonic component contains only the fixed frequency, and can eliminate the harmonic, and has the advantages of simple design a series of, SPWM sine pulse width modulation method is a good waveform improvement. SPWM sine pulse width modulation method for the rapid development of medium and small inverter plays an important role in promoting. Along with the rapid development of power electronic technology, three-phase voltage-source SPWM inverter has been widely used in various fields, and the SPWM technology has become the most widely used PWM technology of inverter.Through research on Modeling and Simulation of three-phase voltage-source SPWM inverter this subject, it can make me have a strength to voltage three-phase SPWM inverter control principle and modeling a more depth understanding, and it can improve myself in the three-phase voltage inverter aspects of computer simulation ability, which can make me have a good foundation of engaged in AC motor control and power inverter related work.Key words: Voltage type; frequency SPWM; Inverter目录摘要 (I)Abstract (II)目录 (III)1 引言 (1)2 电压型三相SPWM逆变器的工作原理及控制方法 (1)2.1 三相电压型逆变器电路 (1)2.2 SPWM控制的基本原理 (4)2.3电压型三相SPWM逆变器的实现及控制 (6)3 电压型三相SPWM逆变器的建模与仿真 (8)3.1 Simulink软件的介绍 (8)3.2 电压型三相SPWM逆变器的建模和仿真 (9)4 总结 (16)参考文献 (17)谢辞 (18)1 引言近年来,随着大功率全控型电力电子器件的研究与开发成功和应用技术的不断成熟,电能变换技术得到了突破性的进展,在一些领域中,已经开始使用各种新型逆变器电源,其中,也包括电动机。

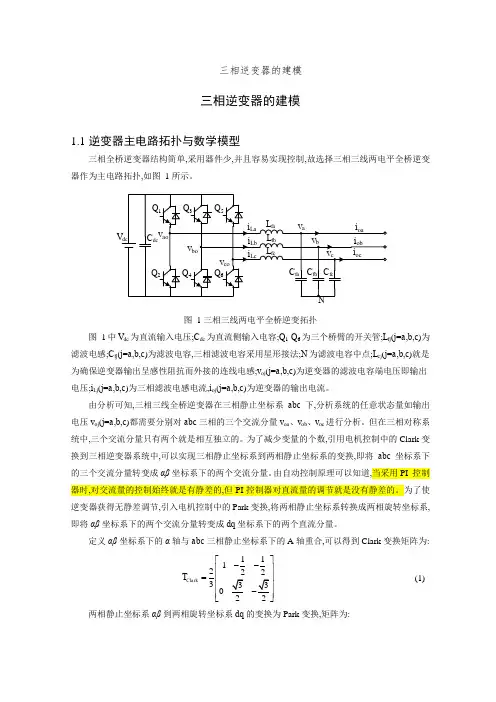
2(1)3 022三相逆变器的建模1.1逆变器主电路拓扑与数学模型三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥 逆变器作为主电路拓扑,如图1所示。
图1三相三线两电平全桥逆变拓扑图1中V dc 为直流输入电压;C dc 为直流侧输入电容;Q 1-Q 6为三个桥臂的开关管;L fj (j=a,b,c) 为滤波电感;C fj (j=a,b,c)为滤波电容,三相滤波电容采用星形接法;N 为滤波电容中点;L cj (j=a,b,c) 是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj (j=a,b,c)为逆变器的滤波电容端电压即输出电压;i Lj (j=a,b,c)为三相滤波电感电流,i oj (j = a,b,c)为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系 abc 下,分析系统的任意状态量如输 出电压v oj (j=a,b,c)都需要分别对abc 三相的三个交流分量 v °a 、晦、v °c 进行分析。
但在三相对称系统中,三个交流分量只有两个是相互独立的。
为了减少变量的个数, 引用电机控制中的 Clark变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将 abc 坐标系下的三个交流分量转变成aB 坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终是有静差的,但PI 控制器对直流量的调节是没有静差的。
为了使逆变器获得无静差调节, 引入电机控制中的Park 变换,将两相静止坐标系转换成两相旋 转坐标系,即将 a 坐标系下的两个交流分量转变成dq 坐标系下的两个直流分量。
定义a 坐标系下的a 轴与abc 三相静止坐标系下的 A 轴重合,可以得到Clark 变换矩阵为:T clarkV dcCdc vao—> ----- V bi ob —v ci oc—hiVC fa C fb C fcQ 425vbojLb .i L cQ ^Q rli LaLfaL fb L fcN两相静止坐标系a 到两相旋转坐标系dq的变换为Park变换,矩阵为:2(1)322cos(,t) sin(,t) —sin( .t) cos( .t)对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为:ua = U mCOS ( .t )5 二 U m cos( -t - 2 二 / 3) u c 二 U m cos( -t 2 二 / 3)经过Clark 和Park 后,可以得到:U d —U m U q =0由式⑶和式(4)可以看出,三相对称的交流量经过上述 Clark 和Park 变换后可以得到在d 轴和q 轴上的直流量,对此直流量进行PI 控制,可以取得无静差的控制效果。
三相逆变器的建模1.1 逆变器主电路拓扑与数学模型三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥逆变器作为主电路拓扑,如图 1所示。
图 1三相三线两电平全桥逆变拓扑图 1中V dc 为直流输入电压;C dc 为直流侧输入电容;Q 1-Q 6为三个桥臂的开关管;L fj (j =a ,b ,c )为滤波电感;C fj (j =a ,b ,c )为滤波电容,三相滤波电容采用星形接法;N 为滤波电容中点;L cj (j =a ,b,c )就是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj (j =a ,b ,c )为逆变器的滤波电容端电压即输出电压;i Lj (j =a ,b ,c )为三相滤波电感电流,i oj (j =a ,b ,c )为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系abc 下,分析系统的任意状态量如输出电压v oj (j =a ,b ,c )都需要分别对abc 三相的三个交流分量v oa 、v ob 、v oc 进行分析。
但在三相对称系统中,三个交流分量只有两个就是相互独立的。
为了减少变量的个数,引用电机控制中的Clark 变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将abc 坐标系下的三个交流分量转变成αβ坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终就是有静差的,但PI 控制器对直流量的调节就是没有静差的。
为了使逆变器获得无静差调节,引入电机控制中的Park 变换,将两相静止坐标系转换成两相旋转坐标系,即将αβ坐标系下的两个交流分量转变成dq 坐标系下的两个直流分量。
定义αβ坐标系下的α轴与abc 三相静止坐标系下的A 轴重合,可以得到Clark 变换矩阵为:11122230ClarkT ⎡⎤--⎢⎥⎢=⎢⎢⎣ (1)两相静止坐标系αβ到两相旋转坐标系dq 的变换为Park 变换,矩阵为:cos()sin()sin()cos()Park t t T t t ωωωω⎡⎤=⎢⎥-⎣⎦(2)对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为:cos()cos(2/3)cos(2/3)a mb mc m u U t u U t u U t ωωπωπ==-=+ (3)经过Clark 与Park 后,可以得到:d m q u U u ==(4)由式(3)与式 (4)可以瞧出,三相对称的交流量经过上述Clark 与Park 变换后可以得到在 d 轴与 q 轴上的直流量,对此直流量进行 PI 控制,可以取得无静差的控制效果。
三相无源逆变器的构建及其MATLAB仿真1逆变器1。
1逆变器的概念逆变器也称逆变电源,是一种可将直流电变换为一定频率下交流电的装置。
相对于整流器将交流电转换为固定电压下的直流电而言,逆变器可把直流电变换成频率、电压固定或可调的交流电,称为DC-AC变换。
这是与整流相反的变换,因而称为逆变。
1.3逆变器的分类现代逆变技术的种类很多,可以按照不同的形式进行分类。
其主要的分类方式如下:1)按逆变器输出的相数,可分为单相逆变、三相逆变和多相逆变。
2)按逆变器输出能量的去向,可分为有源逆变和无源逆变。
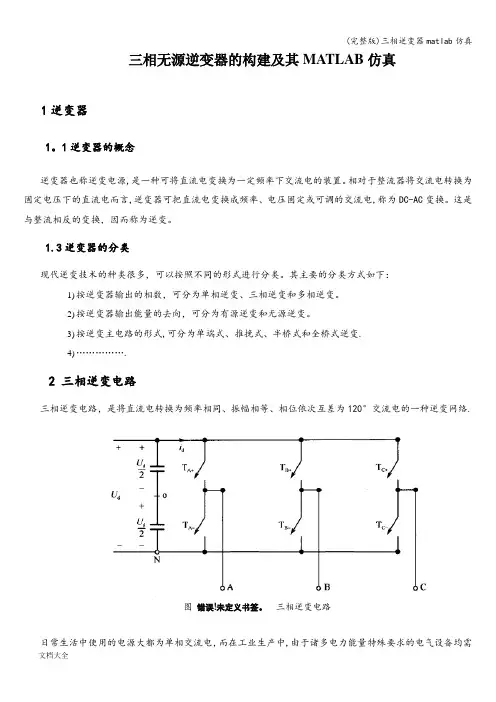
3)按逆变主电路的形式,可分为单端式、推挽式、半桥式和全桥式逆变.4)…………….2 三相逆变电路三相逆变电路,是将直流电转换为频率相同、振幅相等、相位依次互差为120°交流电的一种逆变网络.图错误!未定义书签。
三相逆变电路日常生活中使用的电源大都为单相交流电,而在工业生产中,由于诸多电力能量特殊要求的电气设备均需要使用三相交流电,例如三相电动机。
随着科技的日新月异,很多设备业已小型化,许多原来工厂中使用的大型三相电气设备都被改进为体积小、耗能低且便于携带的小型设备。
尽管这些设备外形发生了很大的变化,其使用的电源类型-—三相交流电却始终无法被取代。
在一些条件苛刻的环境下,电力的储能形式可能只有直流电,如若在这样的环境下使用三相交流电设备,就要求将直流电转变为特定要求的三相交流电以供使用.这就催生了三相逆变器的产生.4M ATLAB仿真Matlab软件作为教学、科研和工程设计的重要方针工具,已成为首屈一指的计算机仿真平台.该软件的应用可以解决电机电器自动化领域的诸多问题。
利用其中的Simulink模块可以完成对三相无源电压型SPWM逆变器的仿真,并通过仿真获取逆变器的一些特性图等数据.图 1 系统Simulink 仿真所示为一套利用三相逆变器进行供电的系统的Matlab仿真.系统由一个380v的直流电源供电,经过三相整流桥整流为三相交流电,并进行SPWM正弦脉宽调制.输出经过一个三相变压器隔离后通入一个三相的RLC负载模块(Three phase parallel RLC)。
基于Matlab/Simulink 的三相SPWM 逆变器的建模与仿真姓 名:** (班级:**)【摘要】随着电力电子技术,计算机技术,自动控制技术的迅速发展,PWM 技术得到了迅速发展,SPWM 正弦脉宽调制法这项技术的特点是原理简单,通用性强,具有开关频率固定,控制和调节性能好,能消除谐波使输出电压只含有固定频率的高次谐波分量,设计简单等一系列有点,是一种比较好的波形改善法。
它的出现为中小型逆变器的发展起了重要的推动作用。
SPWM 技术成为目前应用最为广泛的逆变用PWM 技术。
因此,研究SPWM 逆变器的基本工作原理和作用特性意义十分重大。
本文主要通过对三相SPWM 逆变器的Matlab/Simulink 建模与仿真,研究逆变电路的输入输出及其特性,以及一些参数的选择设置方法。
Simulink 是MATLAB 中的一种可视化仿真工具,是一种基于MATLAB 的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
关键词:SPWM 三相逆变器 Mmatlab/Simulink 建模与仿真 1.三相电压型桥式逆变电路该电路采用双极性控制方式,U 、V 和W 三相的PWM 控制通常公用一个三角载波c u ,三相的调制信号rU u 、rV u 和rW u 一次相差120°。
U 、V 和W 各相功率开关器件的控制规律相同,现以U 相为例来说明。
当rU u >c u 时,给上桥臂1V 以导通信号,给下桥臂4V 以关断信号,则U 相相对于直流电源假想中点'N 的输出电压2/'d UN U u =。
当rU u <c u 时,给4V 以导通信号,给1V 以关断信号,则2/-'d UN U u =。
1V 和4V 的驱动信号始终是互补的。
当给1V (4V )加导通信号时,可能是1V (4V )导通,也可能是二极管1D V (4D V )续流导通,这要由阻感负载中电流的方向来决定。
三相桥式电压型逆变器电路的建模与仿真实验摘要:本文在对三相桥式电压型逆变电路做出理论分析的基础上,建立了基于MATLAB的三相桥式电压型逆变电路的仿真模型并对其进行分析与研究,用MATLAB 软件自带的工具箱进行仿真,给出了仿真结果,验证了所建模型的正确性。
关键词:逆变;MATLAB;仿真第一章概述1.1电力电子技术顾名思义,可以粗略地理解,所谓电力电子技术就是应用于电力领域的电子技术。
电子技术包括信息电子技术和电力电子技术两大分支。
通常所说的模拟电子技术和数字电子技术都属于信息电子技术。
电力电子技术中所变换的"电能"和"电力系统"所指的"电力"是有一定差别的。
两者都指"电能",但后者更具体,特指电力网的"电力",前者则更一般些。
具体地说,电力电子技术就是对电能进行变换和控制的电子技术。
更具体一点,电力电子技术是通过对电子运动的控制对电能进行变换和控制的电子技术。
其中,用来实现对电子的运动进行控制的器件叫电力电子器件。
目前所用的电力电子器件均由半导体材料制成,故也称电力半导体器件。
电力电子技术所变换的"电力",功率可以大到数百兆瓦甚至吉瓦,也可以小到数瓦甚至是毫瓦级。
信息电子技术主要用于信息处理,而电力电子技术则主要用于电力变换,这是二者本质上的不同。
1.2电力电子技术的应用(1)一般工业中,采用电力电子装置对各种交直流电动机进行调速,一些对调速性能要求不高的大型鼓风机近年来也采用变频装置以达到节能的目的,除此之外,有些对调速没有特别要求的电机为了避免启动时的电流冲击而采用软启动装置,这种软启动装置也是电力电子装置。
电化学工业大量使用直流电源,电解铝、电解食盐水以及电镀装置均需要大容量整流电源。
电力电子产品还大量应用于冶金工业中的高频或中频感应加热电源、淬火电源及直流电弧炉电源等场合。
基于Matlab/Simulink 的三相SPWM 逆变器的建模与仿真姓 名:** (班级:**)【摘要】随着电力电子技术,计算机技术,自动控制技术的迅速发展,PWM 技术得到了迅速发展,SPWM 正弦脉宽调制法这项技术的特点是原理简单,通用性强,具有开关频率固定,控制和调节性能好,能消除谐波使输出电压只含有固定频率的高次谐波分量,设计简单等一系列有点,是一种比较好的波形改善法。
它的出现为中小型逆变器的发展起了重要的推动作用。
SPWM 技术成为目前应用最为广泛的逆变用PWM 技术。
因此,研究SPWM 逆变器的基本工作原理和作用特性意义十分重大。
本文主要通过对三相SPWM 逆变器的Matlab/Simulink 建模与仿真,研究逆变电路的输入输出及其特性,以及一些参数的选择设置方法。
Simulink 是MATLAB 中的一种可视化仿真工具,是一种基于MATLAB 的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
关键词:SPWM 三相逆变器 Mmatlab/Simulink 建模与仿真 1.三相电压型桥式逆变电路该电路采用双极性控制方式,U 、V 和W 三相的PWM 控制通常公用一个三角载波c u ,三相的调制信号rU u 、rV u 和rW u 一次相差120°。
U 、V 和W 各相功率开关器件的控制规律相同,现以U 相为例来说明。
当rU u >c u 时,给上桥臂1V 以导通信号,给下桥臂4V 以关断信号,则U 相相对于直流电源假想中点'N 的输出电压2/'d UN U u =。
当rU u <c u 时,给4V 以导通信号,给1V 以关断信号,则2/-'d UN U u =。
1V 和4V 的驱动信号始终是互补的。
当给1V (4V )加导通信号时,可能是1V (4V )导通,也可能是二极管1D V (4D V )续流导通,这要由阻感负载中电流的方向来决定。
三相SPWM逆变器的调制建模和仿真详解随着电力电子技术的发展,SPWM正弦脉宽调制法正逐渐被人们熟悉,这项技术的特点是通用性强,原理简单。
具有开关频率固定,控制和调节性能好,能消除谐波,设计简单,是一种比较好的波形改善法。
它的出现为中小型逆变器的发展起了重要的推动作用。
由于大功率电力电子装置的结构复杂,若直接对装置进行实验,且代价高费时费力,故在研制过程中需要借助计算机仿真技术,对装置的运行机理与特性,控制方法的有效性进行试验,以预测并解决问题,缩短研制时间。
MATLAB软件具有强大的数值计算功能,方便直观的Simulink建模环境,使复杂电力电子装置的建模与仿真成为可能。
本文利用MATLAB/Simulink为SPWM逆变电路建立系统仿真模型,并对其输出特性进行仿真分析。
首先介绍的是三相电压型桥式逆变电路原理,其次阐述了SPWM逆变器的工作原理及特点,最后详细介绍了三相电压源SPWM逆变器的建模与仿真结构,具体的跟随小编一起了解一下。
一、三相电压型桥式逆变电路三相电压型桥式逆变电路如图1所示,电压型三相桥式逆变电路的基本工作方式也是180导电方式,即每个桥臂的导电角度为180,同一相上下2个桥臂交替导电,各相开始导电的角度依次相差120。
这样,在任一瞬间,将有3个桥臂同时导通。
可能是上面一个臂下面2个臂,也可能是上面两个臂下面一个臂同时导通。
因为每次换流都是在同一相上下两个桥臂之间进行的,因此也被称为纵向换流。
当urU》uc时,给上桥V1臂以导通信号,给下桥臂V4以关断信号,则U相相对于电源假想中点N的输出电压uUN=Ud/2。
当urU《uc时,给V4导通,给V1关断,则uUN=Ud/2。
V1和V4的驱动信号始终是互补的。
当给V1(V4)加导通信号时,可能是V1(V4)导通,也可能是二极管VD1(VD4)续流导通。
二、SPWM逆变器的工作原理及特点SPWM,他是根据面积等效原理,PWM波形和正弦波是等效的,对于正弦波的负半周,也可以用同样的方法得到PWM波形。
三相逆变器的建模1.1逆变器主电路拓扑与数学模型三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥逆变器作为主电路拓扑,如图 1所示。
图 1三相三线两电平全桥逆变拓扑图 1中V dc为直流输入电压;C dc为直流侧输入电容;Q1-Q6为三个桥臂的开关管;L fj(j=a,b,c)为滤波电感;C fj(j=a,b,c)为滤波电容,三相滤波电容采用星形接法;N为滤波电容中点;L cj (j=a,b,c)是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj(j=a,b,c)为逆变器的滤波电容端电压即输出电压;i Lj(j=a,b,c)为三相滤波电感电流,i oj(j=a,b,c)为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系abc下,分析系统的任意状态量如输出电压v oj(j=a,b,c)都需要分别对abc三相的三个交流分量v oa、v ob、v oc进行分析。
但在三相对称系统中,三个交流分量只有两个是相互独立的。
为了减少变量的个数,引用电机控制中的Clark变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将abc 坐标系下的三个交流分量转变成αβ坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终是有静差的,但PI控制器对直流量的调节是没有静差的。
为了使逆变器获得无静差调节,引入电机控制中的Park变换,将两相静止坐标系转换成两相旋转坐标系,即将αβ坐标系下的两个交流分量转变成dq坐标系下的两个直流分量。
定义αβ坐标系下的α轴与abc三相静止坐标系下的A轴重合,可以得到Clark变换矩阵为:1 / 11 / 111122230ClarkT ⎡⎤--⎢⎥⎢=⎢⎢⎣ (1)两相静止坐标系αβ到两相旋转坐标系dq 的变换为Park 变换,矩阵为:cos()sin()sin()cos()Park t t T t t ωωωω⎡⎤=⎢⎥-⎣⎦(2)对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为:cos()cos(2/3)cos(2/3)a mb mc m u U t u U t u U t ωωπωπ==-=+ (3)经过Clark 和Park 后,可以得到:d m q u U u == (4)由式(3)和式(4)可以看出,三相对称的交流量经过上述Clark 和Park 变换后可以得到在 d 轴和 q 轴上的直流量,对此直流量进行 PI 控制,可以取得无静差的控制效果.1.1.1 在abc 静止坐标系下的数学模型首先考虑并网情况下,微电网储能逆变器的模型。
选取滤波电感电流为状态变量,列写方程:000a a a la b f b b lb c c lc c di dt u u i di L u u r i dt u u i di dt ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦(5)其中,f L 为滤波电感,r 为滤波电感寄生电阻,系统中三相滤波电感取值相同。
在abc 三相静止坐标系中,三个状态变量有两个变量独立变量,需要对两个个变量进行分析控制,但是其控制量为交流量,所以其控制较复杂。
1.1.2 在αβ两相静止坐标系下的数学模型由于在三相三线对称系统中,三个变量中只有两个变量是完全独立的,可以应用Clark 变换将三相静止坐标系中的变量变换到αβ两相静止坐标系下,如图 2所示。
1 / 1A图 2 Clark 变换矢量图定义αβ坐标系中α轴与abc 坐标系中a 轴重合,根据等幅变换可以得到三相abc 坐标系到两相αβ坐标系的变换矩阵:12121203a b c u u u u u αβ⎡⎤--⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦(6)联立式(5)与式(6),可以得到微电网储能逆变器在αβ坐标系下的数学模型:00f di u u i dt L r u u i di dt ααααββββ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦(7)从式(7)可以看出,与三相静止坐标系下模型相比,减少了一个控制变量,而各变量仍然为交流量,控制器的设计依然比较复杂。
1.1.3 在dq 同步旋转坐标系下的数学模型根据终值定理,PI 控制器无法无静差跟踪正弦给定,所以为了获得正弦量的无静差跟踪,可以通过Clark 和Park 变换转换到dq 坐标系下进行控制。
dq 两相旋转坐标系相对于αβ两相静止坐标系以ω的角速度逆时针旋转,其坐标系间的夹角为θ,图 2给出了Park 变换矢量图。
图 3 Park 变换矢量图Park 变换矩阵方程为:cos sin sin cos d q u u t t u u t t αβωωωω⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦(8)联立式(7)和式(8)可得微电网储能逆变器在dq 坐标系下的数学模型:1 / 100df d d f q d qf q q f d q di L u u L i ri dtdi L u u L i ri dtωω⎧=-+-⎪⎪⎨⎪=---⎪⎩(9)在两相旋转坐标系下电路中控制变量为直流量,采用PI 控制能消除稳态误差,大大简化了系统控制器的设计。
但是,由于dq 轴变量之间存在耦合量,其控制需要采用解耦控制,解耦控制方法将在下节介绍。
1.1.4 解耦控制从式(9)可以看出,dq 轴之间存在耦合,需要加入解耦控制。
令逆变器电压控制矢量的d 轴和q 轴分量为:d gd q dq gq d q v u Li v v u Li v ωω=+-∆⎧⎪⎨=--∆⎪⎩(10)其中d v ∆,q v ∆分别是d 轴和q 轴电流环的输出,当电流环采用PI 调节器,满足:**()()()()ii d ip d d ii q ip q q K v K i i sK v K i i s ⎧∆=+-⎪⎪⎨⎪∆=+-⎪⎩(11)ip K ,ii K 分别是电流PI 调节器的比例系数和积分系数,*d i ,*q i 分别为d 轴和q 轴的参考电流,d i ,q i 分别为d 轴和q 轴的实际电流采样.把公式(10)代入公式(9)可得:dd d q q q di L ri v dtdi L ri v dt⎧=-+∆⎪⎪⎨⎪=-+∆⎪⎩ (12)由式(12)可以看出,由于在控制矢量中引入了电流反馈,抵消了系统实际模型中的耦合电流量,两轴电流已经实现独立控制。
同时控制中引入电网电压前馈量gd u 和gq u ,提高了系统对电网电压的动态响应。
图 4是电流解耦控制框图。
解耦方法为在各轴电流PI 调节器输出中加入其他轴的解耦分量,解耦分量大小与本轴被控对象实际产生的耦合量大小一致,方向相反[1]。
1 / 1图 4 电流解耦控制图对公式(12)进行拉普拉斯变换,同时把公式(11)代入公式(12)可得:()()()()()()ii d ip d d ii q ip q qk Ls r i k i i s k Ls r i k i i s **⎧+=+-⎪⎪⎨⎪+=+-⎪⎩(13) 在采用解耦控制之后,d 轴电流和q 轴电流分别控制。
图 5给出电流内环的结构框图.*图 5 电流内环结构框图其中,s T 为电感电流采样周期,ip K 和ii K 对应电流环的PI 参数,1/(10.5)s T s +代表PWM 控制产生的惯性环节[2],1/(1)s T s +代表电流采样的延迟[3]。
PWM K 为调制比,由于本文空间矢量调制(Space Vector Pulse Width Modulation, SVPWM ),调制过程中引入了直流电压的前馈环节,所以PWM K 可以表示为:1PWM K =(14)本系统开关频率和器件参数为:1/1/15kHz=66.7us s s T f ==, 1.5mH L =,0.1R =Ω,50uF C =.由于d 轴和q 轴电流环完全对称,所以本文只分析d 轴电流环的设计过程。
由于合并小惯性环节并不会影响系统低频特性,可以将图 5化简,得到图 6。
1 / 1图 6 d 轴电流环简化结构框图1.2 电压电流双环设计1.2.1 电流环设计由上述分析可知,在环路设计时可以对d 轴电流和q 轴电流分别进行控制[4],从而可以得到如图 7所示的电流环控制框图。
图 7 电流环控制框图其中, K ip 和K ii 对应电流环的PI 参数,T s 为电流内环采样周期,1/(1+T s s )和1/(1+0.5T s s )分别代替电流环信号采样的延迟和PWM 控制的小惯性延时环节[5]。
本文设计的系统参数如下:L =1。
5mH ,R =0.1Ω,C =50μF ,T s =1/f s =1/15k Hz=66.7μs 。
由于d 轴与q 轴的电流环类似,故以d 轴电流环为例进行分析。
补偿前电流环的开环传递函数为:0()(1.51)()PWMc s K G s T s R Ls =++(15)补偿网络的传递函数为:1()ip iiK s K H s s+=(16)直流增益20lg|G c 0(s )|=20dB ;幅频特性的转折频率为100Hz ,设定补偿后的穿越频率为1/10的开关频率,即1500Hz 。
则有:011(21500)(21500)c G j H j ππ⋅=⋅(17)若加入补偿网络后,系统回路的开环增益曲线以-20dB/dec 斜率通过0dB 线,变换器具有较好的相位裕量.由于补偿前的传递函数在中频段的斜率已经为-20dB/dec ,因此补偿网络在1500Hz 时斜率为零。
将PI 调节器的零点设计在原传递函数的主导极点转折频率处,即100Hz 处。
1 / 1令:ip iiK L K R= (18)联立式(17)及式(18)可得电流环的PI 参数:K ip =18,K ii =1200。
实际取值:K ip =10,K ii =1200。
频率/Hz图 8 电流环补偿前后的波特图图 8所示为电流环补偿前后的波特图。
可以看出,补偿前电流环的开环传递函数G c 0(s )在低频段的增益为20dB,并且在100Hz 时穿越0dB 线,相位裕度为75°;加入补偿环节后,电流环的闭环传递函数G il (s )其幅频特性曲线在1000Hz 处以-20dB/dec 斜率通过0dB 线,相位裕度为60°。
补偿之后回路的开环传递函数为:()()(1.51)()PWM ip ii s K K s K G s s T s R Ls +=++ (19)因此,补偿之后电流环的闭环传递函数为:2()(1.51)()()1()() 1.51()11(1.51)()PWM ip ii s il PWM ip ii s ip PWMip PWM s K K s K s T s R Ls G s G s K K s K LT LG s s s K K K K s T s R Ls +++===+++++++ (20)1.2.2 电压环设计电压外环主要是保证输出电压的稳态精度,动态响应相对较慢。