步进电机的结构与原理
- 格式:ppt
- 大小:32.86 MB
- 文档页数:61
步进电机的结构和工作原理
嘿,朋友!今天咱来聊聊步进电机这个神奇的玩意儿!你知道吗,步进电机就像是一个超级精准的小舞者,在各种设备里欢快地跳动着。
先来说说它的结构吧。
步进电机就像是一个小巧而精致的“房子”,里面有定子和转子这两个重要的部分。
定子就像是“房子”的墙壁,稳稳地立在那里;而转子呢,就像在“房子”里欢快转动的小轮子。
比如说在打印机里,定子就固定在那里,给转子提供一个稳定的环境,让转子顺畅地转动,从而带动打印头精确地移动。
那它的工作原理又是什么呢?这可太有趣啦!可以把它想象成是一个非常听话的小士兵。
我们给它发送一个一个的电脉冲信号,它就会一步一步地按照我们的指令前进。
就好比我们在指挥小士兵进行队列训练,每一个指令它都一丝不苟地执行。
比如在数控机床里,我们通过控制电脉冲,让步进电机精确地带动刀具移动,从而加工出各种精密的零件,是不是超级厉害!
“哎呀呀,这步进电机咋这么神奇呢!”你可能会这样惊叹。
没错呀,它就是这么牛!虽然它看起来小小的,但其作用可真是不容小觑呢!在我们生活中的很多地方都能看到它的身影,从家用电器到工业设备,它都在默默地贡献着自己的力量。
我觉得啊,步进电机就像是一个默默奉献的小英雄,虽然它不被大多数人所熟知,但却在各种领域里发挥着至关重要的作用。
我们真应该好好感谢它,感谢它让我们的生活变得更加便利和精彩呀!。
步进电机结构及工作原理步进电机是一种特殊的电动机,它可以通过电脉冲控制精确地旋转一定角度,并且不需要传统的反馈系统。
步进电机主要由定子、转子和控制电路组成。
1. 定子步进电机的定子通常由两个或多个绕组组成,每个绕组都被连接到一个相位驱动器上。
这些绕组被排列在定子上,并且相互之间呈90度的偏移角度。
当驱动器向一个绕组发送脉冲时,该绕组会产生一个磁场,吸引转子中的磁铁。
2. 转子步进电机的转子通常由磁铁或永磁体构成。
当定子中的绕组被激活时,它们会产生一个磁场,吸引或排斥转子中的磁铁。
这种作用力使得转子沿着旋转方向移动一定角度。
3. 控制电路步进电机的控制电路通常由微处理器、计数器和驱动器构成。
微处理器负责计算出需要发送给驱动器的脉冲序列,并将其发送到计数器中进行计数。
当计数器达到预设值时,它会向驱动器发送一个脉冲,激活定子中的绕组。
工作原理:步进电机的工作原理基于磁场的相互作用。
当定子中的绕组被激活时,它们会产生一个磁场,吸引或排斥转子中的磁铁。
这种作用力使得转子沿着旋转方向移动一定角度。
每次激活定子中的一个绕组都会使得转子旋转一定角度,这个角度通常称为步进角。
步进电机可以通过改变脉冲序列和频率来控制旋转速度和方向。
当需要逆时针旋转时,只需要改变脉冲序列的顺序即可。
此外,步进电机还可以通过微处理器控制来实现精确的位置控制和速度调节。
总结:步进电机是一种特殊的电动机,它可以通过电脉冲控制精确地旋转一定角度,并且不需要传统的反馈系统。
步进电机主要由定子、转子和控制电路组成。
当驱动器向一个绕组发送脉冲时,该绕组会产生一个磁场,吸引或排斥转子中的磁铁。
这种作用力使得转子沿着旋转方向移动一定角度。
步进电机可以通过改变脉冲序列和频率来控制旋转速度和方向,并且可以通过微处理器控制来实现精确的位置控制和速度调节。
步进电机结构及原理
步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制元件。
它利用电磁学原理,将电能转换为机械能。
其结构通常包括前后端盖、轴承、中心轴、转子铁芯、定子铁芯、定子组件、波纹垫圈和螺钉等部分。
步进电机的工作原理基于电磁感应定律。
当施加在电机线圈上的电脉冲信号产生磁场时,磁场与定子铁芯相互作用产生转矩,驱动转子旋转。
通过控制施加在电机线圈上的电脉冲顺序、频率和数量,可以实现对步进电机的转向、速度和旋转角度的控制。
每接收一个脉冲信号,步进电机就按设定的方向转动一个固定的角度,称为“步距角”,其旋转是以固定的角度一步一步运行的。
步进电机具有一些显著的特点。
首先,它们是开环控制系统的一部分,这意味着它们不依赖于位置反馈来调节运动。
其次,步进电机具有高精度的定位能力,这使得它们在需要精确控制位置的应用中非常有用。
此外,步进电机可以在不同的负载条件下保持恒定的速度,因为电机的转速只取决于脉冲信号的频率,而不受负载变化的影响。
总的来说,步进电机是一种功能强大且适应性强的电机类型,广泛应用于各种需要精确控制位置和速度的场合。
如需了解更多信息,建议咨询电机方面的专家或查阅相关专业书籍。

步进电机结构简介按照励磁方式分类,步进电机可分为反应式、永磁式和感应子式。
其中反应式步进电机用的比较普遍,结构也较简单。
本课题采用的也是此类电机。
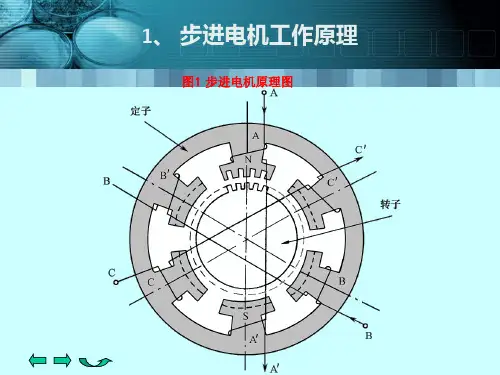
反应式步进电机又称为磁阻式步进电机,其典型结构如图1所示。
这是一台三相电机,定子铁心由硅钢片叠成,定子上有6个磁极,每个磁极上又各有5个均匀分布的矩形小齿。
三相电机共有三套定子控制绕组,绕在径向相对的两个磁极上的一套绕组为一相。
转子也是由叠片铁心构成,转子上没有绕组,而是由40个矩形小齿均匀分布在圆周上,相邻两齿之间的夹角为9度。
下面简述其工作原理。
当某相绕组通电时,对应的磁极就会产生磁场,并与转子形成磁路。
若此时定子的小齿与转子的小齿没有对齐,则在磁场的作用下,转子转动一定的角度使转子齿与定子齿对应。
由此可见,错齿是促使步进电机旋转的根本原因。
例如,在单三拍运行方式中,当A相控制绕组通电,而B、C相都不通电时,由于磁通具有力图走磁阻最小路径的特点,所以转子齿与A相定子齿对齐。
若以此作为初始状态,设与A相磁极中心磁极的图1 步进电机剖面结构转子齿为0号齿,由于B相磁极与A相磁极相差120度,且120度/9度=13.333不为整数,所以,此时13号转子齿不能与B相定子齿对齐,只是靠近B相磁极的中心线,与中心线相差3度。
如果此时突然变为B相通电,而A、C相都不通电,则B相磁极迫使13号小齿与之对齐,整个转子就转动3度。
此时称电机走了一步。
同理,我们按照A→B→C→A顺序通电一周,则转子转动9度。
转速取决于各控制绕组通电和断电的频率(即输入脉冲频率),旋转方向取决于控制绕组轮流通电的顺序。
如上述绕组通电顺序改为A→C→B→A······则电机转向相反。
这种按A→B→C→A······方式运行的称为三相单三拍,“三相”是指步进电机具有三相定子绕组,“单”是指每次只有一相绕组通电,“三拍”是指三次换接为一个循环。
步进电机结构及工作原理步进电机是一种将电能转化为机械能的电机,其工作原理是通过交替激励电流使电机转动一定角度。
步进电机的结构主要包括转子、定子、驱动电路和传感器。
转子是步进电机的旋转部件,通常采用多个磁极组成。
常见的转子形式包括两相、三相、四相等。
每个磁极上通有一个电线圈,通过控制电流的通断来实现对电机的控制。
定子是一个定位部件,通常由磁铁或磁性材料制成。
定子的作用是提供一个磁场,使转子能够在不同的位置停留。
定子的磁场较为稳定,当转子旋转时,定子的磁场不随其变化。
驱动电路是步进电机的控制部分,负责向电机提供合适的电流信号,控制电机旋转的角度和速度。
驱动电路一般由调速器和功率放大器组成,通过对电流的控制来实现对电机的精确控制。
传感器是一种用于检测电机转动状态的装置,主要用于监控电机的位置和速度。
传感器可以是光电传感器、霍尔传感器等。
当电机旋转到指定位置时,传感器会发出信号,将信号传输给控制系统。
步进电机的工作原理是利用保持磁场的定子和改变磁场的转子之间的相互作用来实现电机的旋转。
当定子的磁场与转子的磁场相互作用时,转子会发生磁力作用,从而使步进电机旋转。
步进电机根据不同的控制方式可以分为开环步进电机和闭环步进电机。
开环步进电机是通过控制驱动电路向电机提供脉冲信号来控制电机的旋转角度和速度。
当驱动电路接收到一个脉冲信号后,会向电机通入一定电流,使电机转动一个固定的角度。
通过不断输入脉冲信号,可以实现电机的连续旋转。
闭环步进电机是在开环步进电机的基础上增加了位置反馈系统。
闭环步进电机通过传感器检测电机的位置和速度,并将信息返回给驱动电路。
驱动电路根据传感器的反馈信号来调整电流的大小和方向,实现对电机转动的精确控制。
步进电机具有结构简单、控制方便、输出扭矩大等优点,常应用于机床、自动控制系统、印刷设备等领域。
1、步进马达是由驱动器发出的脉冲信号来控制转速和转向的马达。
步进马达每接收到一个脉冲信号,将产生一个恒定量的步进运动,即产生一定量的角位移。
这个位移的角度就叫作步进角。
(它主要是由示波器进行控制)它是由线圈架、铜线、极齿组成,定子在励磁时极齿被磁化产生磁场,并与转子磁场相互作业。
2、步进马达的工作原理:步进马达工作时要有一个能提供脉冲信号的电子驱动电路。
生产部门用的是大的驱动器(示波器),它的工作过程为:指令→变频信号源→脉冲分配器→ 脉冲放大器→ 步进马达。
当马达工作时,驱动电路按预先设定的频率,向步进马达发出固定的脉冲频率信号(PPS),PPS-Pulses Per Second信号数/每秒。
(注意了,这个PPS是周波数的用作单位来着)当步进马达收到脉冲信号后,定子线圈产生磁场(励磁),根据电流的方向可以用右手定则来判断磁场方向,(线圈的A相与B相分别判断)如定子极齿为N极,则外壳极齿就为S极。
反之,定子极齿为S极,外壳极齿就为N极。
由于定子极齿与外壳极齿产生了交错的磁极,并与转子的交错磁极相互吸引,根据马达励磁方式的通电顺序,决定了马达的旋转方向(CW、CCW)。
步进马达接收到一个脉冲信号,定子磁场就变化一次,转子就转一个步进角。
连续向马达发出脉冲信号,马达就连续转动。
在一定范围内调整马达的周波(PPS),就可以调整步进马达的转速。
所以马达的转速不受电压的影响,而受周波数的影响。
周波数越大,马达的转速越快,马达消耗的电流就越小。
3、马达内部结构:图片有事有不过我的级别不够不能给你发过来,过意不去了只能给你简单的介绍下了(以下是基本普遍的的马达,无法说的太详细):步进马达结构主要分为:外壳、定子、转子、马达、钢球、支架、弹簧垫片、垫圈、轴承、丝杆轴、齿轮(滑轮)等部品。
部品名称及用处;1)、外壳:包装支撑马达,外壳极齿在定子励磁时被磁化产生磁场。
2)、定子:由线圈架、铜线、极齿组成,定子在励磁时极齿被磁化产生磁场,并与转子磁场相互作业。
步进电机的工作原理步进电机是一种常见的电动机,广泛应用于各种机械和自动化设备中。
它以其精准的控制和高度可靠性而受到青睐。
本文将介绍步进电机的基本原理和工作方式。
1. 基本工作原理步进电机是一种将电能转换为机械能的设备,通过电磁原理实现驱动。
其基本构造包括定子与转子。
定子通常由两种或多种电磁线圈组成,这些线圈按照特定的顺序被激活。
转子则是由一组磁体组成,以使定子磁电流激活时能产生磁通。
2. 单相步进电机单相步进电机也称为单相混合式步进电机。
它具有两个电磁线圈,相位差为90度。
当线圈被激活时,会产生磁场。
根据磁场的相互作用,电机转子就可以旋转到一个新的位置。
单相步进电机的工作原理是通过改变线圈通电的顺序来控制运动。
3. 双相步进电机双相步进电机是一种更为常见的类型,它具有四个电磁线圈,相位差为90度。
每个线圈都可以单独激活,控制电机的运动。
在双相步进电机中,每次只有两个线圈被激活,以产生磁场。
通过交替激活不同的线圈,可以实现电机的旋转。
双相步进电机具有较高的转矩和精确的位置控制能力。
4. 步进电机的特点步进电机具有以下几个特点:4.1 准确定位:通过激活特定的线圈顺序,步进电机可以以特定的角度准确旋转,从而实现准确定位。
4.2 高度可编程:步进电机通过控制电流和脉冲的频率来控制转动速度和转动方向。
4.3 高度精密:由于线圈的激活顺序可以精确控制,步进电机可以实现非常精确的运动。
4.4 无需反馈系统:相比其他类型的电机,步进电机无需附加的位置反馈系统即可实现精确控制。
5. 应用领域由于其精准的控制和高度可靠性,步进电机在许多领域得到广泛应用,包括:5.1 3D打印机:步进电机用于控制打印头在XYZ轴上的位置,从而实现精确的打印。
5.2 CNC机床:步进电机用于控制刀具的位置和转动角度,从而实现自动化的数控加工。
5.3 机器人:步进电机用于控制机器人的运动,包括旋转和定位。
5.4 线性驱动器:步进电机也可以应用于线性驱动器,实现对物体位置的精确控制。
简述步进电机的工作原理步进电机是一种特殊的电动机,其运动是由控制信号驱动的,每次控制信号的到来会使电机向前或向后转动一定的角度。
步进电机的工作原理是通过电磁场的变化来实现转动。
本文将从步进电机的结构、原理、分类及应用等方面进行详细阐述。
一、步进电机的结构步进电机由转子和定子两部分组成。
转子是由一组磁极组成,通常有两种类型:永磁转子和电磁转子。
定子是由一组线圈组成,线圈的数目和磁极数目相等。
当通电时,定子线圈中会产生磁场,与磁极相互作用,从而使转子转动。
二、步进电机的原理步进电机的原理是利用电磁场的变化来实现转动。
当定子线圈通电时,会产生磁场,磁场会与转子的磁极相互作用,从而使转子转动。
通常情况下,步进电机是通过控制信号来控制定子线圈的通断,从而实现电机的转动。
控制信号的波形可以是脉冲信号、方波信号等。
三、步进电机的分类步进电机根据其结构和工作原理的不同,可以分为以下几种类型: 1、永磁式步进电机永磁式步进电机的转子由永磁体组成,定子由线圈组成。
当定子线圈通电时,会产生磁场,与永磁体相互作用,从而使转子转动。
永磁式步进电机具有结构简单、工作可靠、转矩大等优点。
2、单相步进电机单相步进电机是一种简单的步进电机,由一组线圈和一个铁芯组成。
当线圈通电时,会产生磁场,与铁芯相互作用,从而使转子转动。
单相步进电机的结构简单,但转矩较小,通常用于一些低功率的应用。
3、双相步进电机双相步进电机是一种常用的步进电机,由两组线圈和一个铁芯组成。
当两组线圈交替通电时,会产生磁场,与铁芯相互作用,从而使转子转动。
双相步进电机具有转矩大、精度高等优点,广泛应用于一些自动化设备中。
4、混合式步进电机混合式步进电机是一种综合了永磁式和电磁式步进电机的特点的电机。
其转子由永磁体和电磁线圈组成,具有转矩大、精度高等优点,广泛应用于一些高精度的自动化设备中。
四、步进电机的应用步进电机具有结构简单、精度高、转矩大等优点,广泛应用于一些自动化设备中。
步进电机原理、结构、用法步进电机各相轮流接入整步电流后所产生的步距角叫做该步进电机的基本步距角。
F 相步进电机有F 个绕组,这F 个绕组要均匀地镶嵌在定子上,因此定子的磁极数必定是F 的整数倍,因此,转子转一圈的步数应该是F 的整数倍;也就是说:3 相步进电机转一圈的步数是3的整数倍,4 相步进电机转一圈的步数是4 的整数倍,5相步进电机转一圈的步数是5 的整数倍;如果步进电机的基本步距角为A ,转一圈的步数是M ,步进电机的相数是F 则有下述关系:A=360/M由于上述机械对称原理,M 必然是相数F 的整数倍,即:M=N*F 其中N 是正整数。
跟据以上分析可以看出,基本步距角是不能取任意值的。
我们往往希望步进电机转一圈为100 步或其倍数,这在2/4 相和5 相步进电机容易做到,但对于三相步进电机其基本步距角不可能做到转一圈为100 步或200 步,但可以是300 步。
有些厂家所标的三相步进电机的步距角为1.2 度或3 度,相当每圈300 步或1 20 步,是3 的整数倍,这种标注很正常。
有些厂家所标注的三相步进电机的步距角为1.8/0.9/0.72/0.36 度,相当每圈200/400/500 /1000 步,不是3 的整数倍,所以这些厂家所标注的不是步进电机的基本步距角,而是步进驱动器每输入一个步进脉冲时步进电机的转角,或是步进电机转一圈时,步进驱动器输入的脉冲个数;其实这是步进驱动器带来的功能,厂家标注到步进电机上了;这种标注方法很容易造成迷惑,甚至有一些步进电机的销售商自己都讲不清楚,我也是看到这些标注后有了怀疑,通过分析得出的结果。
步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。
在目前国内的数字控制系统中,步进电机的应用十分广泛。
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。
为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。
步进式伺服驱动系统是典型的开环控制系统。
在此系统中, 执行元件是步进机电。
它受驱动 控制路线的控制, 将代表进给脉冲的电平信号直接变换为具有一定方向、大小和速度的机械转角位移, 并通过齿轮和丝杠带动工作台挪移。
由于该系统没有反馈检测环节, 它的精度较差,速度也受到步进机电性能的限制。
但它的结构和控制简单、容易调整,故在速度和精度 要求不太高的场合具有一定的使用价值。
步进机电的分类方式不少, 常见的分类方式有按产生力矩的原理、 按输出力矩的大小以及按定子和转子的数量进行分类等。
根据不同的分类方式,可将步进机电分为多种类型,如表5- 1 所示。
具 体 类 型 (1)反应式:转子无绕组,由被激磁的定子绕组产生反应力矩实现 步进运行(2)激磁式:定、转子均有激磁绕组(或者转子用永久磁钢),由电 磁力矩实现步进运行 (1)伺服式:输出力矩在百分之几之几至十分之几(N ·m)只能驱 动较小的负载,要与液压扭矩放大器配用,才干驱动机床工作台等较大 的负载 (2)功率式:输出力矩在 5-50 N ·m 以上,可以直接驱动机床工作 台等较大的负载(1)单定子式(2)双定子式(3)三定子式(4)多定子式(1)径向分布式:机电各相按圆周挨次罗列(2)轴向分布式:机电各相按轴向挨次罗列分 类 方 式按力矩产生的原理按输出力矩大小按定子数按各相绕组分布目前,我国使用的步进机电多为反应式步进机电。
在反应式步进机电中,有轴向分相和径向分相两种,如表5-- 1 所述。
图5--2 是一典型的单定子、径向分相、反应式伺服步进机电的结构原理图。
它与普通机电一样,分为定子和转子两部份,其中定子又分为定子铁心和定子绕组。
定子铁心由电工钢片叠压而成,其形状如图中所示。
定子绕组是绕置在定子铁心6 个均匀分布的齿上的线圈,在直径方向上相对的两个齿上的线圈串联在一起,构成一相控制绕组。
图5--2 所示的步进电机可构成三相控制绕组,故也称三相步进机电。
步进电机的工作原理步进电机是一种将电脉冲信号转化为机械位移或角度旋转的电机。
它的工作原理基于电磁学和电子学原理,通过控制电流方向和大小来驱动电机转动。
步进电机通常由电机本体、编码器、驱动器和控制器组成。
其中电机本体由定子和转子构成。
定子上有若干个分布均匀的定子绕组,而转子上有若干个磁极。
定子绕组通过电流控制,产生旋转磁场,而转子上的磁极则受到磁场的作用而旋转。
1.磁场原理:转子上的磁极通常由永磁体制成。
当定子绕组产生的旋转磁场与转子上的磁极相互作用时,会产生一个磁转矩,使得转子受到力的作用而旋转。
磁转矩的大小取决于定子绕组电流的大小和转子上的磁极数目。
2.电流控制:步进电机通过控制驱动器提供的电流方向和大小,来控制电机的旋转运动。
一般来说,步进电机有两种驱动方式:双向驱动和单向驱动。
在双向驱动中,电流通过不同的绕组,可以使电机转动到正转方向或逆转方向;而在单向驱动中,电流只通过一个绕组,电机只能以一个方向旋转。
在使用步进电机进行控制时,通常通过给定输入信号的脉冲数目和频率,来控制驱动器产生相应的电流脉冲。
这些电流脉冲使得电机按照相应的步距绕组进行运动,从而实现所需的机械位移或角度旋转。
3.驱动方式:全步进驱动中,电流通过一个绕组,使得电机以一个固定的步距旋转。
全步进驱动可以使得电机转动更加平稳,但在高速运转时,会出现震动和共振的问题。
半步进驱动通过改变电流的大小,使电机旋转的步距变为原步距的一半。
半步进驱动对于控制电机的准确度更高,能够实现更细微的机械位移或角度旋转。
但半步进驱动也会增加电路的复杂性与实现的难度。
总结来说,步进电机通过控制电流的方向和大小,利用电磁学原理实现对机械装置的运动控制。
它的工作原理基于磁场原理、电流控制和驱动方式,并通过编码器、驱动器和控制器等组件实现实际的应用。