齿轮传动蜗杆传动受力分析
- 格式:ppt
- 大小:558.50 KB
- 文档页数:12
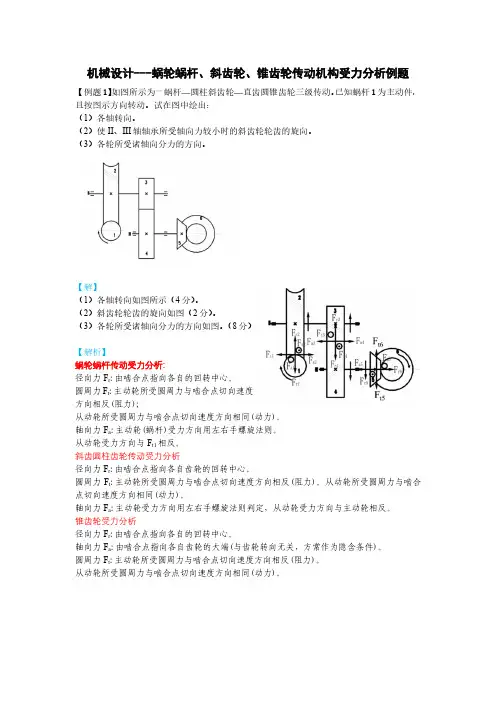
机械设计---蜗轮蜗杆、斜齿轮、锥齿轮传动机构受力分析例题【例题1】如图所示为一蜗杆—圆柱斜齿轮—直齿圆锥齿轮三级传动。
已知蜗杆1为主动件,且按图示方向转动。
试在图中绘出:
(1)各轴转向。
(2)使II、III轴轴承所受轴向力较小时的斜齿轮轮齿的旋向。
(3)各轮所受诸轴向分力的方向。
【解】
(1)各轴转向如图所示(4分)。
(2)斜齿轮轮齿的旋向如图(2分)。
(3)各轮所受诸轴向分力的方向如图。
(8分)
【解析】
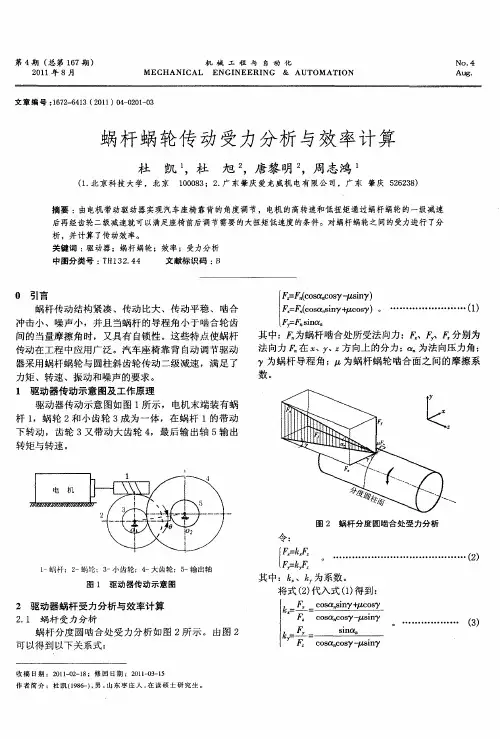
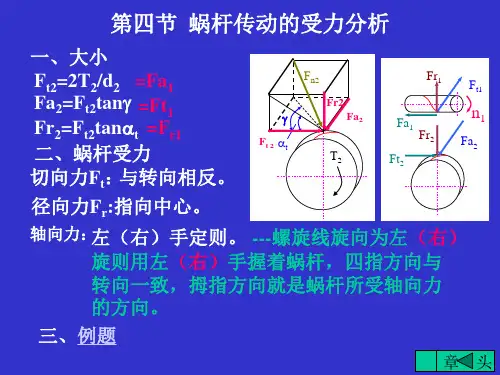
蜗轮蜗杆传动受力分析:
径向力F r:由啮合点指向各自的回转中心。
圆周力F t:主动轮所受圆周力与啮合点切向速度
方向相反(阻力);
从动轮所受圆周力与啮合点切向速度方向相同(动力)。
轴向力F a:主动轮(蜗杆)受力方向用左右手螺旋法则。
从动轮受力方向与F t1相反。
斜齿圆柱齿轮传动受力分析
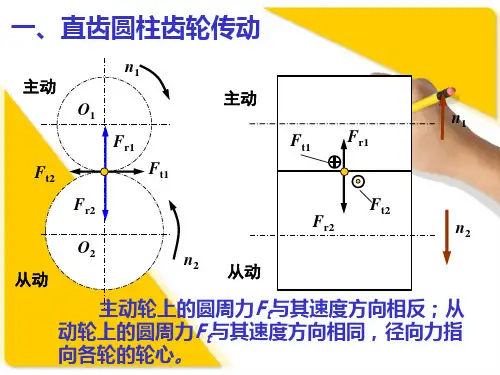
径向力F r:由啮合点指向各自齿轮的回转中心。
圆周力F t:主动轮所受圆周力与啮合点切向速度方向相反(阻力)。
从动轮所受圆周力与啮合点切向速度方向相同(动力)。
轴向力F a:主动轮受力方向用左右手螺旋法则判定,从动轮受力方向与主动轮相反。
锥齿轮受力分析
径向力F r:由啮合点指向各自的回转中心。
轴向力F a:由啮合点指向各自齿轮的大端(与齿轮转向无关,方常作为隐含条件)。
圆周力F t:主动轮所受圆周力与啮合点切向速度方向相反(阻力)。
从动轮所受圆周力与啮合点切向速度方向相同(动力)。
普通圆柱蜗杆传动承载能力计算(一)蜗杆传动的失效形式、设计准则及常用材料和齿轮传动一样,蜗杆传动的失效形式也有点蚀(齿面接触疲劳破坏)、齿根折断、曲面胶合及过度磨损等。
由于材料和结构上的原因,蜗杆螺旋齿部分的强度总是高于蜗轮轮齿的强度,所以失效经常发生在蜗轮轮齿上。
因此,一般只对蜗轮轮齿进行承载能力计算。
由于蜗杆与蜗轮齿面间有较大的相对滑动,从而增加了产生胶合和磨损失效的可能性,尤其在某些条件下(如润滑不良),蜗杆传动因齿面胶合而失效的可能性更大。
因此,蜗杆传动的承载能力往往受到抗胶合能力的限制。
在开式传动中多发生齿面磨损和轮齿折断,因此应以保证齿根弯曲疲劳强度作为开式传动的主要设计准则。
在闭式传动中,蜗杆副多因齿面胶合或点蚀而失效。
因此,通常是按齿面接触疲劳强度进行设计,而按齿根弯曲疲劳强度进行校核。
此外,闭式蜗杆传动,由于散热较为困难,还应作热平衡核算。
由上述蜗杆传动的失效形式可知,蜗杆、蜗轮的材料不仅要求具有足够的强度,更重要的是要具有良好的磨合和耐磨性能。
蜗杆一般是用碳钢或合金钢制成。
高速重载蜗杆常用15Cr或20Cr,并经渗碳淬火;也可用40、45号钢或40Cr并经淬火。
这样可以提高表面硬度,增加耐磨性。
通常要求蜗杆淬火后的硬度为40~55HRC,经氮化处理后的硬度为55~62HRC。
一般不太重要的低速中载的蜗杆,可采用40或45号钢,并经调质处理,其硬度为220~300HBS。
常用的蜗轮材料为铸造锡青铜(ZCuSnlOPl,ZCuSn5Pb5Zn5)、铸造铝铁青铜(ZCuAl10Fe3)及灰铸铁(HTl5O、HT2OO)等。
锡青铜耐磨性最好,但价格较高,用于滑动速度Vs≥3m/s的重要传动;铝铁青铜的耐磨性较锡青铜差一些,但价格便宜,一般用于滑动速度Vs≤4m/s的传动;如果滑动速度不高(Vs<2m/s),对效率要求也不高时,可采用灰铸铁。
为了防止变形,常对蜗轮进行时效处理。
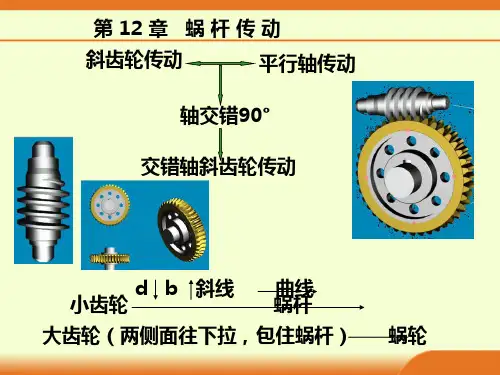
(二)蜗杆传动的受力分析蜗杆传动的受力分析和斜齿圆柱齿轮传动相似。

齿轮与蜗杆转动总结————————————————————————————————作者:————————————————————————————————日期:蜗杆传动1.如图所示为一蜗杆起重装置。
已知:蜗杆头数11=z ,模数5=m ,分度圆直径601=d mm,传动效率25.0=η,卷筒直径320=D mm,需要提起的重量6300=G N,作用在手柄上的力280=F ,手柄半径180=l mm 。
试确定:G1Z 2Z lD蜗杆起重装置(1) 蜗杆的齿数2z(2) 蜗杆所受的轴向力1a F 的大小及方向; (3) 提升重物时手柄的转向。
解:(1)通过手柄施加给蜗杆的驱动转矩为:mm N Fl T ⋅⨯=⨯==411004.5180280提升重物G所需要的蜗轮的转矩为:mm N D G T ⋅⨯=⨯=⨯=6210008.1232063002 由于1T 和2T 满足的关系式:ηi T T 12=,因此有:5025.01004.510008.14612=⨯⨯⨯==ηT T i 所以5012==i z z(2)蜗杆所受的轴向力1a F 为:N mz T d T F F t a 806422222221===-= 1a F 的方向水平向右。
(3)当提升重物时,蜗轮逆时针转动,蜗杆所受轴向力水平向右,由于蜗杆右旋,所以,根据右手定则可以判断出手柄的转向为竖直向下(即从手柄端看为顺时针方向)。
2.如果所示为一升降机传动装置示意图。
已知电动机功率KW P 8=,转速m in /9701r n =,蜗杆传动参数为11=z ,402=z ,mm m 10=,8=q ,'''30207ο=λ,右旋,蜗杆蜗轮副效率75.01=η。
设整个传动系统的总效率为68.0=η,卷筒直径mm D 630=。
试求:VQ1n 电D2341a F 1r F 升降机传动装置示意图(a)(b)n11a F 1r F 1t F(1) 当升降机上行时,电动机的转向(在图中标出即可); (2) 升降机上行时的速度v ; (3) 升降机的最大载重量Q;(4) 蜗杆所受的各分力的大小及方向(方向在图中标出即可)。