电子科大龙格库塔法解半导体激光器速率方程
- 格式:doc
- 大小:113.00 KB
- 文档页数:3

matlab对半导体激光器速率方程进行求解文章标题:深入探讨Matlab对半导体激光器速率方程的求解1. 简介半导体激光器作为一种重要的光电器件,在通信、医疗、材料加工等领域具有广泛的应用。
而速率方程是描述半导体激光器内部过程的重要数学模型,通过对速率方程的求解,可以更好地理解半导体激光器的工作原理和特性。
在本文中,我将结合Matlab软件,就如何利用Matlab对半导体激光器速率方程进行求解展开深入探讨。
2. 半导体激光器速率方程简介半导体激光器速率方程是描述半导体激光器内部电子和光子之间相互作用的重要数学模型。
其一般形式如下:\[ \frac{dn}{dt} = G - \frac{n}{\tau_{n}} - \frac{nI}{I_{s}} \]\[ \frac{dI}{dt} = \frac{e\eta V}{q}n - (\alpha+g)nI \]其中,n为激子数密度,I为激光光强,G为外界注入的光子数密度,τn为激子寿命,I s为饱和光子密度,η为激子与光子的电荷,V为激光器波导体积,q为电子电荷量,e为元电荷,α为损耗系数,g为增益系数。
3. Matlab在对半导体激光器速率方程求解中的应用Matlab作为一种强大的科学计算软件,提供了丰富的数学建模和仿真工具,非常适合用于对半导体激光器速率方程的求解。
利用Matlab,可以通过编写相应的数学模型和算法,实现对速率方程的数值求解。
Matlab提供了丰富的绘图和数据分析功能,可以对求解结果进行直观展示和分析。
4. 在Matlab中编写半导体激光器速率方程求解程序在使用Matlab对半导体激光器速率方程进行求解时,首先需要编写相应的数学模型和算法。
可以利用Matlab的ODE求解器对速率方程进行数值求解。
还可以结合Matlab的优化工具,对速率方程的参数进行拟合和优化,得到更准确的结果。
在编写程序时,应注意处理数值求解的收敛性和稳定性,避免出现数值不稳定或发散的情况。
高功率双包层光纤激光器受激布里渊散射张韶冬,熊彩东电子科技大学物理电子学院,成都(610054)E-mail :shaodongzhang163@摘 要:建立了考虑受激布里渊散射的光纤激光器速率方程,并采用打靶法对其求解,从理论上分析了高功率双包层光纤激光器的受激布里渊散射效应。
通过比较不同的纤芯直径、光纤长度以及掺杂浓度的情况下输出激光功率极限值的不同,发现增大纤芯直径、减小光纤长度以及降低掺杂浓度可以有效地减少受激布里渊散射的影响。
关键词:光纤激光器,受激布里渊散射,速率方程 中图分类号: TN248.1; O437.2 文献标识码: A1. 引言近年来,双包层光纤激光器得到了快速发展,输出功率水平快速提高[1]。
目前,受激布里渊散射是影响光纤激光器和光纤放大器输出功率提高的主要因素[2]。
它是一种在光纤内发生的非线性过程,达到阈值之后,它能将大部分泵浦能量转移到斯托克斯波上,从而限制光纤激光器输出功率[3]。
本文从速率方程出发,对单端泵浦方式下的光纤激光器的受激布里渊散射进行了详细的研究与讨论,得出了纤芯直径、光纤长度以及掺杂浓度对输出激光功率极限值的影响。
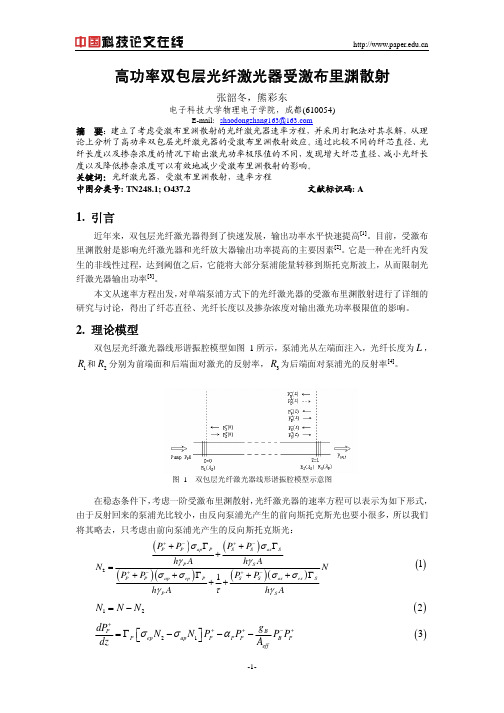
2. 理论模型双包层光纤激光器线形谐振腔模型如图 1所示,泵浦光从左端面注入,光纤长度为L ,1R 和2R 分别为前端面和后端面对激光的反射率,3R 为后端面对泵浦光的反射率[4]。
图 1 双包层光纤激光器线形谐振腔模型示意图在稳态条件下,考虑一阶受激布里渊散射,光纤激光器的速率方程可以表示为如下形式,由于反射回来的泵浦光比较小,由反向泵浦光产生的前向斯托克斯光也要小很多,所以我们将其略去,只考虑由前向泵浦光产生的反向斯托克斯光:()()()()()()21PP ap PSS as SP S P P ap ep PS S as es SP S PP P P h Ah AN N P P P P h Ah Aσσγγσσσσγτγ+−+−+−+−+Γ+Γ+=++Γ++Γ++()1 12N N N =−()2 21P B P ep ap P P P B P effdP g N N P P P P dz A σσα+++−+⎡⎤=Γ−−−⎣⎦()321P P ep ap P P P dP N N P P dzσσα−−−⎡⎤=−Γ−+⎣⎦ ()4 []21S S es as S S S dP N N P P dzσσα+++=Γ−− ()5 []21S S es as S S S dP N N P P dzσσα−−−=−Γ−+ ()6 B B B P B B effdP gP P P dz A α−−+−=−+()7式中:P P ±,S P ±,B P ±分别表示光纤中泵浦光、激光和布里渊斯托克斯光的功率(±代表正向和反向);2N 和1N 分别为上、下能级粒子数浓度,N 为总的粒子数浓度;P Γ和S Γ分别为泵浦光和激光与纤芯的重叠因子;ep σ和ap σ分别为泵浦光发射和吸收截面,es σ和as σ分别为激光发射和吸收截面;P α、s α和B α分别为泵浦光、激光和布里渊斯托克斯光的散射损耗系数,由于布里渊频移相对较小,可以认为泵浦光与斯托克斯光有相同的光纤损耗,即B P αα=,后面的式子将用P α来代替B α;P γ和S γ分别为泵浦光和激光的频率;h 为普朗克常量;A 为纤芯面积;τ为2E 能级粒子的自发辐射寿命;B g 为布里渊增益系数峰值;eff A 为有效纤芯面积。


半导体激光器设计理论I. 速率方程理论 (郭长志, LT1-1C3.doc , 11 Oct. 2007)§1.2-2 突变同型异质结的库莫(Kumer )理论[13, 14, 5]同型异质结积累区的空间电荷分布和电势分布,除了可以求解泊松方程得 出之外,还可以由归一化势能积分得出。
从而可以准解析地得出其两边的内建电 场F 和总电荷Q 。
对于如图1.2-5(a ) 所示的n-N 结其 带阶为:021≥∆=-=∆χχχc E (1.2-2a )()()c g g g v E E E E E ∆-∆=---=∆2112χχ(1.2-2b )这里的 ∆χ ≥ 0是由于定义 χ1 和 χ2 分 别是窄带隙和宽带隙的电子亲和势。
§1.2-2A n-N 同型异质结在无偏压的平衡情况下内建势能为:2112c c c c c d e E F F V q δδ-+∆=-=()()2211c c c c c F E F E E ---+∆= (1.2-2c ')⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛-∆=2211ln ln c d B c d B c N N T k N N T k E ⎪⎪⎭⎫⎝⎛-∆=1221ln c d c d B c N N N N T k E (1.2-2c )真空能级- + χ2 Φ2χ1 Φ1 ∆E c δc2 E c2 E c1 q e V D q e V D2 F c2F c1 q e V D1 δc1 E FE g1 E g2E v1 ∆E v其中后两式采用了非简并统计近似。
由(1.2-2c ',b ),远离结区的带边之差分别为:()0211221<+∆-=∆-=∆--=-d e c d e c d e c c c c c V q E V q E V q E F F E E (1.2-2d )()()()v d e d e v d e g c c g c g c v v E V q V q E V q E E E E E E E E E ∆++=∆+=∆+-=---=-2121221121 (1.2-2e )电荷密度分布为:()[]p n N q x de +-=+ρ[]⎥⎥⎦⎤⎢⎢⎣⎡--=-≈-1T k E F d c d e d e B cc e N N N q n N q (1.2-2f ) 电势方程为:()+=-=dxd F dx dF F dx d dx d F εεεϕ,g ) 泊松方程为:()()⎥⎥⎦⎤⎢⎢⎣⎡-=-=→=-1022T k E F d c de B cc e N N N q x dx xd dx d εερϕε (1.2-2h ) n -和N -半导体接触并达到平衡时,其能带图将如图1.2-5(b )所示。


龙格库塔方程1.介绍龙格-库塔(RK)方法是求解常微分方程(ODE)最常见的数值方法之一。
对于大多数非线性ODE问题,解析解并不存在或难以获得,因此需要使用数值方法来近似计算解。
RK方法通过迭代逼近ODE的解来得到精确性可控、收敛性好、易实现的数值解。
RK方法的基本思想是将ODE中的一阶导数转化为一组计算步骤,以得到相邻时间点之间的函数值和一阶导数的近似值,然后将其结合起来得到一个更精确的解。
2.RK方法的推导RK方法的推导过程是基于欧拉方法的,欧拉方法是RK方法的一阶近似。
假设有ODE$\frac{dx}{dt}=f(x,t)$,欧拉方法的迭代公式为$$x_{n+1}=x_n+hf(x_n,t_n)$$其中$h$是时间步长,$t_n=n*h$。
这个公式的意思是,从$x_n$开始,用一阶导数$f(x_n,t_n)$来列出切线,然后沿着切线向前移动$h$个单位,得到$x_{n+1}$。
更高阶的RK方法则基于更精细的近似。
例如,经典的四阶RK方法(RK4)迭代公式为:\begin{align*}k_1&=f(x_n,t_n)\\k_2&=f(x_n+\frac{h}{2}k_1,t_n+\frac{h}{2})\\k_3&=f(x_n+\frac{h}{2}k_2,t_n+\frac{h}{2})\\k_4&=f(x_n+h k_3,t_n+h)\\x_{n+1}&=x_n+\frac{h}{6}(k_1+2k_2+2k_3+k_4)\end{align*}其中,$k_1$是欧拉方法的一阶导数解,依次计算得到更高阶的导数近似值$k_2-k_4$。
3.RK方法的优势RK方法与其他数值方法相比具有众多优点。
首先,RK方法的精度可控。
通过增加迭代次数或者近似阶次,RK 方法可以获得任意高的精度。
这个特性非常适用于涉及长时间尺度和小尺度特征的问题,例如天气预报,需要同时精确地处理地球的自转和大气的扰动。
龙格库塔求解量子光学中的经典模型【实用版】目录1.引言2.龙格库塔算法简介3.量子光学中的经典模型4.龙格库塔算法在求解量子光学经典模型中的应用5.结论正文1.引言量子光学是研究光与物质相互作用的学科,它在现代物理学领域具有重要的地位。
在量子光学中,许多经典模型需要求解,以便更好地理解和解释光的行为。
然而,这些模型往往具有一定的复杂性,需要高效的数值方法来进行求解。
在这样的背景下,龙格库塔算法应运而生,成为了求解量子光学经典模型的有力工具。
2.龙格库塔算法简介龙格库塔(Runga-Kutta)算法是一种常用于求解常微分方程初值问题的数值方法。
它具有较高的精度和稳定性,广泛应用于各个领域的科学计算中。
龙格库塔算法的原理是将微分方程的解在每个时间步长上进行四阶龙格库塔插值,从而获得一个近似解。
这种方法可以有效地减少数值误差,提高求解的精度。
3.量子光学中的经典模型在量子光学中,有许多经典模型需要求解,例如:波函数的演化、量子态的叠加和干涉、光的传播等。
这些模型描述了光的性质和行为,对于理解和探索光的本质具有重要意义。
然而,这些模型往往具有一定的复杂性,需要高效的数值方法来进行求解。
4.龙格库塔算法在求解量子光学经典模型中的应用龙格库塔算法在求解量子光学经典模型中具有广泛的应用。
例如,在求解波函数演化方程时,可以通过龙格库塔算法对波函数进行四阶插值,从而获得一个近似解。
这种方法可以有效地减少数值误差,提高求解的精度。
此外,在求解光的传播问题时,龙格库塔算法也可以发挥重要作用。
它可以用来模拟光的传播过程,从而更好地理解光的行为。
5.结论总之,龙格库塔算法作为一种高效的数值方法,在求解量子光学中的经典模型方面具有重要的应用价值。
通过使用龙格库塔算法,可以提高求解的精度和稳定性,更好地理解和探索光的性质和行为。
半导体激光器速率方程求解半导体激光器是一种利用电流驱动产生激光的器件,广泛应用于通信、激光打印、医疗和科学研究等领域。
了解和理解半导体激光器的工作原理对于设计和优化激光器具有重要意义。
在本文中,我们将介绍半导体激光器速率方程以及如何使用MATLAB进行求解。
半导体激光器速率方程半导体激光器速率方程描述了半导体激光器内部发生的光与电子相互作用的过程。
速率方程包含了四个关键项:电子注入项I in,非辐射复合项R nr,自发辐射项R sp和受激辐射项R spon。
方程可以写成如下形式:dN dt =I ineV−Nτnr+Nτsp+Nτspon其中,N表示激光器内的载流子密度,t表示时间,e为元电荷,V为激光器的有效体积,τnr为非辐射寿命,τsp为自发辐射寿命,τspon为受激辐射寿命。
使用MATLAB求解速率方程MATLAB是一种功能强大的数值计算软件,适合用于求解微分方程。
我们可以利用MATLAB的ODE求解器来求解半导体激光器速率方程。
首先,我们需要定义速率方程的函数形式。
在MATLAB中,我们可以定义一个函数文件,例如rate_equation.m,其中包含速率方程的定义:function dNdt = rate_equation(t, N)% 参数定义I_in = 1; % 电子注入项V = 1; % 有效体积tau_nr = 1; % 非辐射寿命tau_sp = 2; % 自发辐射寿命tau_spon = 0.5; % 受激辐射寿命% 速率方程求解dNdt = (I_in / (e * V)) - (N / tau_nr) + (N / tau_sp) + (N / tau_sp on);end然后,我们可以使用MATLAB的ODE求解器对速率方程进行求解。
例如,可以使用ode45求解器来得到方程的数值解。
% 定义时间范围和初始载流子密度tspan = [010]; % 时间范围N0 = 0; % 初始载流子密度% 求解速率方程[t, N] = ode45(@rate_equation, tspan, N0);% 绘制载流子密度随时间变化的曲线plot(t, N);title('半导体激光器载流子密度随时间变化');xlabel('时间');ylabel('载流子密度');运行以上MATLAB代码,我们可以得到半导体激光器载流子密度随时间变化的曲线图。
第二章 光注入半导体激光器的速率方程模型2.1 光反馈半导体激光器光反馈或光注入半导体激光器的速率方程是分析和模拟系统特性的理论基础,本节先推导光反馈半导体激光器的电场速率方程―Lang-Kobayashi 方程[29],并分析了振荡条件。
为方便分析,将半导体激光器的参量及各参量的关系分别列入表2-1和表2-2。
表2-1 激光器参量的意义符号 物理量 单位 电量 C 有源区体积 m 3 载流子寿命 ns 光子寿命 ps 限制因子 --- 阈值载流子密度 m -3 透明载流子密度 m -3 增益饱和系数 m 3 线宽增强因子 --- 微分增益 m 3s -1 自发辐射因子 --- 端面强度反射率 ---波长nm表2-2 参量之间的关系Table 2-2 Relationships of parameters2.1.1 图2-1 光反馈Fabry-Perot 谐振腔示意图图2-1为光反馈的示意图,激光谐振腔两端面的反射率分别为1R 、2R ,腔长为L ,外部反射镜的反射率为e R 、距离为/2e L c τ=,τ为激光在外腔中环行一次的时间。
E +、E-分别表示正向、负向传播的时变电场的复振幅。
激光的动态变化行为取决于增益,因此可以将增益作为算子。
激光在腔内环行一次的增益为int 2())r G i kL Γg L α=-+- (2-1)将其变为指数形式,上式可变为int exp(2())r m G i kL Γg L αα=-+-- (2-2)其中/k n c ω=为波数。
实际上,激光器有源区内载流子密度()N t 随时间的变化将导致介质折射率和振荡频率的变化。
因此将波数在无光反馈阈值点(th n ,th ω)展开()()g th th th th th n n n nN N c c c N cωωωωω∂≈+-+-∂ (2-3) 其中,g th nn n ωω∂=+∂为介质的群折射率。
将(2-3)式代入(2-2)中,并将r G 分解成1r G G G ω=,其中:频率无关项1int exp[()]exp((2/)())m th th nG Γg L i L c N N Nααω∂=----∂ (2-4) 频率相关项22exp[()]g th th th n Ln L G ii c cωωωω=--- (2-5) 由于2th th n L c ω是2π的整数倍,并且角频率为ω的单色波电场满足关系式di dtω=,G ω可改写为算子exp()exp()th L LdG i dtωωττ=- (2-6) 由于激光器振荡频率在阈值附近,即th ωω≈,因此对时变复电场()et %可引入慢变化复电场振幅()|()|exp(())E t E t i Φt =,即()()exp()th e t E t i t ω=% (2-7)其中th d dtΦωω=-。
第二章 光注入半导体激光器的速率方程模型2.1 光反馈半导体激光器光反馈或光注入半导体激光器的速率方程是分析和模拟系统特性的理论基础,本节先推导光反馈半导体激光器的电场速率方程―Lang-Kobayashi 方程[29],并分析了振荡条件。
为方便分析,将半导体激光器的参量及各参量的关系分别列入表2-1和表2-2。
表2-1 激光器参量的意义符号 物理量 单位 电量 C 有源区体积 m 3 载流子寿命 ns 光子寿命 ps 限制因子 --- 阈值载流子密度 m -3 透明载流子密度 m -3 增益饱和系数 m 3 线宽增强因子 --- 微分增益 m 3s -1 自发辐射因子 --- 端面强度反射率 ---波长nm表2-2 参量之间的关系Table 2-2 Relationships of parameters2.1.1 图2-1 光反馈Fabry-Perot 谐振腔示意图图2-1为光反馈的示意图,激光谐振腔两端面的反射率分别为1R 、2R ,腔长为L ,外部反射镜的反射率为e R 、距离为/2e L c τ=,τ为激光在外腔中环行一次的时间。
E +、E-分别表示正向、负向传播的时变电场的复振幅。
激光的动态变化行为取决于增益,因此可以将增益作为算子。
激光在腔内环行一次的增益为int 2())r G i kL Γg L α=-+- (2-1)将其变为指数形式,上式可变为int exp(2())r m G i kL Γg L αα=-+-- (2-2)其中/k n c ω=为波数。
实际上,激光器有源区内载流子密度()N t 随时间的变化将导致介质折射率和振荡频率的变化。
因此将波数在无光反馈阈值点(th n ,th ω)展开()()g th th th th th n n n nN N c c c N cωωωωω∂≈+-+-∂ (2-3) 其中,g th nn n ωω∂=+∂为介质的群折射率。
将(2-3)式代入(2-2)中,并将r G 分解成1r G G G ω=,其中:频率无关项1int exp[()]exp((2/)())m th th nG Γg L i L c N N Nααω∂=----∂ (2-4) 频率相关项22exp[()]g th th th n Ln L G ii c cωωωω=--- (2-5) 由于2th th n L c ω是2π的整数倍,并且角频率为ω的单色波电场满足关系式di dtω=,G ω可改写为算子exp()exp()th L LdG i dtωωττ=- (2-6) 由于激光器振荡频率在阈值附近,即th ωω≈,因此对时变复电场()e t 可引入慢变化复电场振幅()|()|exp(())E t E t i Φt =,即()()exp()th e t E t i t ω= (2-7)其中th d dtΦωω=-。
姓名:李清学号:************ 学院:电子科学技术研究院龙格库塔法解半导体激光器速率方程
1、光强与载流子随时间变化曲线
图1
图2
2、分析半导体激光器工作原理
从图1中我们可以看出激光器工作开始时反转粒子数不断增加,当超过阈值后发生激光
的激射。
同时,观察图2我们还可以发现,当发生激射后,反转粒子数还在不断增加,激光光强不断增加。
由于激光的产生是以消耗反转粒子数为代价的,因此载流子数开始减少,小于阈值后便不会继续产生激光。
接着反转粒子数被不断激励,数目增加,超过阈值后又发生激光激射,这就是半导体激光器的工作原理。
3、使用稳态分析推导阈值电流的大小
在稳态时,增益等于损耗,也就是G=r,同时电场和载流子数均不随时间变化,将这些带入第二个方程,即可解得结果如下,与之电流为0.058417067A。
4、源程序:
t0=0;
h=1e-12;
tn=1e-8;
n=(tn-t0)/h+1;
E=zeros(1,n);
N=zeros(1,n);
E(1)=0.1;
N(1)=1e8;
t=t0:h:tn;
for i=1:n-1
E1=f1(N(i),E(i));
E2=f1(N(i)+h/2,E(i)+E1*h/2);
E3=f1(N(i)+h/2,E(i)+E2*h/2);
E4=f1(N(i)+h,E(i)+E3*h);
E(i+1)=E(i)+(E1+2*E2+2*E3+E4)*h/6;
N1=f2(E(i),N(i));
N2=f2(E(i)+h/2,N(i)+N1*h/2);
N3=f2(E(i)+h/2,N(i)+N2*h/2);
N4=f2(E(i)+h,N(i)+N3*h);
N(i+1)=N(i)+(N1+2*N2+2*N3+N4)*h/6;
end
Nn=N(n);
In=abs(E(n)).*abs(E(n));
N0=1.5e8;
g=3.6e3;
r=252e9;
Nx=r/g+N0;
q=1.6e-19;
re=1.66e9;
I0=re*Nx*q+r*q*E(n);
subplot(211)
plot(t,abs(E))
title('电场强度曲线')
xlabel('t')
ylabel('E')
subplot(212)
plot(t,N)
title('载流子数变化曲线')
xlabel('t')
ylabel('N')
figure(2),plot(t,abs(E).*abs(E)) title('光强变化曲线')
xlabel('t')
ylabel('光强')
function f1=f1(N,E)
a=3;
g=3.6e3;
N0=1.5e8;
G=g*(N-N0);
r=252e9;
f1=0.5*(1+1i*a)*(G-r)*E;
function f2=f2(E,N)
I=90e-3;
q=1.6e-19;
re=1.66e9;
g=3.6e3;
N0=1.5e8;
G=g*(N-N0);
f2=I/q-re*N-G*(abs(E))^2;。