METSIM软件基础教程
- 格式:pdf
- 大小:1.30 MB
- 文档页数:43
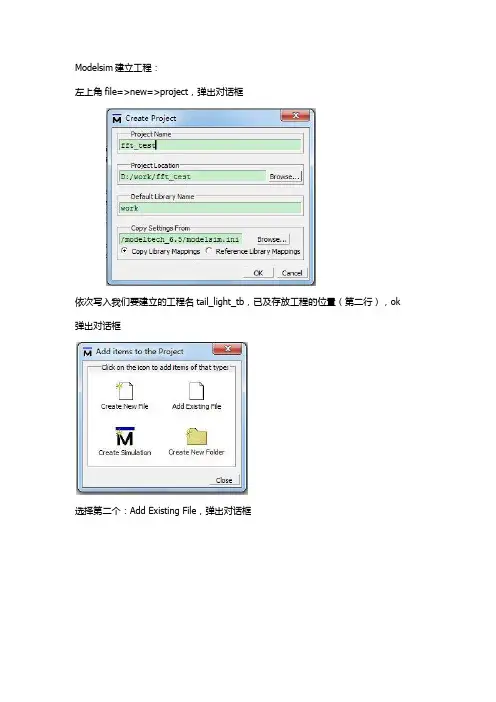
Modelsim建立工程:左上角file=>new=>project,弹出对话框依次写入我们要建立的工程名tail_light_tb,已及存放工程的位置(第二行),ok 弹出对话框选择第二个:Add Existing File,弹出对话框点击Browse,选择我们需要的文件(,此处我们需要4个文件,分别是led_matrix_mod.v,pulse_clk_nco.v,tail_light_mod.v, tail_light_tb.v)然后右击,弹出对话框,选择compile all,编译所有文件编译完成后,选择tool下面tcl选项,如图:弹出对话框选择tail_light_tb.tcl,打开弹出波形文件工程说明1逐行解释程序内部注释的有2设计思路见txt文档3每个模块的主要功能:tail_light_sys.v:开发板工程的顶层模块,用来连接各个子模块jitter_clear_mod.v:消抖模块,用来消除按键按下时带来的抖动tail_light_mod.v:汽车尾灯状态生成模块,根据不同的按键,解析成汽车尾灯的状态led_matrix_mod.v:led流水灯控制模块,根据刹车油门左右转等不同状态来控制led 流水灯的亮灭pulse_clk_nco.v:分频扫描模块,用于产生控制led流水灯速度的脉冲信号tail_light_tb.tcl:modelsim的脚本文件,可方便的进行modelsim仿真tail_light_tb.v:modelsim仿真的顶层文件,提供其仿真的时钟复位按键等模拟环境4:仿真波形简单说明按照上述操作结束后,弹出一个波形文件,点击上边的放大缩小等按钮,可方便观察波形本仿真主要观察模拟的4个按键,如下以及对应状态下的3组灯的变化状态,如下可点击放大按钮,看具体变化值,如下可点击左边的+号,可看每一个灯的变化,如下。

系统仿真AMESim软件使用说明目录1.AMESim是什么?2.AMESim 建模步骤?3.AMESim接口4.AMESim标准库5.AMESim软件包6.AMESim参数和变量观察7.AMESim建模(调用已有模型,讲解各元件及相互间联系)1.AMESim是什么?AMESim表示工程系统仿真高级建模环境(Advanced Modeling Environment for performing Simulations of engineering systems).基于直接图形接口,在整个仿真过程中草图系统可以显示在环境中。
AMESim 使用图标符号代表各种系统的元件,这些图标符号要么是国际标准组织(如工程领域的ISO为液压元部件)确定的标准符号、控制系统确定的方块图符号,或者当不存在这样的标准符号时可以为该系统给出一个容易接受的非标准图形特征。
Figure 1.1: AMESim中使用符号(标准液压,机械和控制符号表达的一个工程系统)Figure 1.2: 汽车制动系统的符号(非标准图形特征)2.如何使用AMESim?可按如步骤进行系统建模仿真:• sketch mode (草图模式)----从不同的应用库中选取现存的图形• submodel mode (子模型模式)----为每个图形选择子模型(即给定合适的数学模型假设)• parameter mode (参数设置模式)----每个图形模型设置特定的参数• simulation mode (仿真模式)----运行仿真并分析仿真结果大多数自动化系统都可按上述步骤执行,在每一步都可以看到系统草图。
3.接口与脚本you have the possibility of interfacing with Matlab/Simulink to test the Electronic Control Unit (ECU) of the complete gearbox and have the complete simulation platform for the conception of every kind of gearboxes3.1接口3.2 脚本4.标准库标准库提供了控制和机械图标,子模型允许你完成大量工程系统的动态仿真。

SimMechanics简介及建模流程simmechanies是matlab/simulink下的一个子模块,如图4.1所示。
它由七个部分组成,分别是bodies、constraints&drivers、foreeelements、interfaeeelements、joints、sensors&actuators和utilities。
以上七个部分包括了建模用到的所有模块,其中,最基本的模块是bodics和joints。
bodies中包含刚体、接地和机械系统环境三个模块,joints中包含了各种接头,这些接头包括了平移、旋转等各种运动副。
sensors&actuators用于对机械系统外加驱动力或测量系统上的参数,它们是将simmechanis中的模块与simulink普通模块联系起来的中介。
在simmeehanics模型中,刚体就是机械系统最基本的形成要素。
则表示刚体的模块ground和body两种。
ground模块用以则表示质量和尺寸无穷大的刚体,通常做为整个机械系统的参照物地面,整个系统的基架通常都与groimd模块相连接则表示紧固在地面上。
body模块用以则表示具备非常有限质量和尺寸的刚体,并且在模块中还涵盖存有与这个刚体所固联的坐标系。
刚体之间通过jnini连接在一起,模块里的接头和我们通常所说的物理上的接头不同,接头只是代表一个刚体相对于另一个刚体具有一定数目的自由度,而它们在物理上可以是没有连接关系的。
joint的种类很多,一般来讲,这些接点都就是由4种最基本类型的关节组合而成的:prismati(p)代表沿定轴具备一个位移自由度;revolut(r)代表绕定轴具备一个转动自由度;spherical(s)代表拖一个固定点具备3个转动自由度;weld(w)代表冲压相连接具备0个自由度。
这些最基本的关节女团出来就构成了具备多个位移和转动自由度的复合接头。
simmechanics的joints模块库里包含了各种常见自由度的接头,还提供了可自己定制的customjoint接头,用户可根据自己的需要自己建立合适的接头。
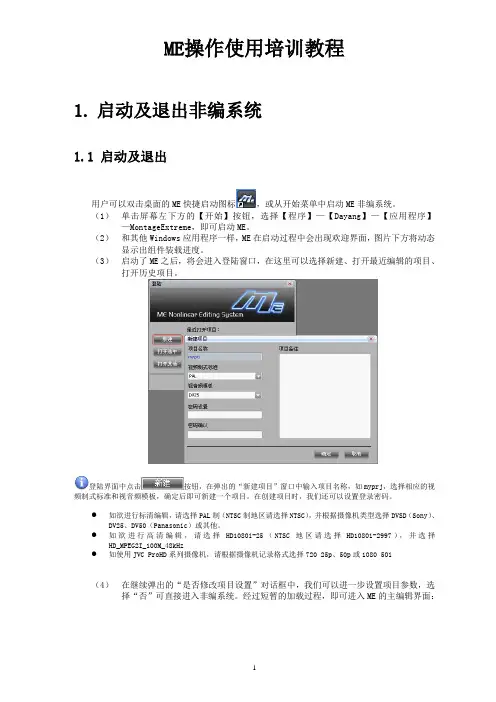
ME操作使用培训教程1.启动及退出非编系统1.1 启动及退出用户可以双击桌面的ME快捷启动图标,或从开始菜单中启动ME非编系统。
(1)单击屏幕左下方的【开始】按钮,选择【程序】—【Dayang】—【应用程序】—MontageExtreme,即可启动ME。
(2)和其他Windows应用程序一样,ME在启动过程中会出现欢迎界面,图片下方将动态显示出组件装载进度。
(3)启动了ME之后,将会进入登陆窗口,在这里可以选择新建、打开最近编辑的项目、打开历史项目。
登陆界面中点击按钮,在弹出的“新建项目”窗口中输入项目名称,如myprj,选择相应的视频制式标准和视音频模板,确定后即可新建一个项目。
在创建项目时,我们还可以设置登录密码。
●如欲进行标清编辑,请选择PAL制(NTSC制地区请选择NTSC),并根据摄像机类型选择DVSD(Sony)、DV25、DV50(Panasonic)或其他。
●如欲进行高清编辑,请选择HD1080i-25(NTSC地区请选择HD1080i-2997),并选择HD_MPEG2I_100M_48kHz●如使用JVC ProHD系列摄像机,请根据摄像机记录格式选择720 25p、50p或1080 50i(4)在继续弹出的“是否修改项目设置”对话框中,我们可以进一步设置项目参数,选择“否”可直接进入非编系统。
经过短暂的加载过程,即可进入ME的主编辑界面:中的【退出】,在弹出的提示窗中确认退出。
1.2 项目参数设置ME是基于项目管理的编辑产品,启动系统时需要选择或新建项目,设置相应的视频制式标准和视音频模板。
初次启动项目时,系统会提示是否需要修改项目设置,选择“是”,则可进入项目参数设置窗口。
在进入项目后也可以通过主菜单【系统】-【系统参数设置】-【项目参数设置】进入项目参数设置窗口。
通常需要关注视频比例设置、高标清上下变换方式、采集和合成的参数。
2. 素材的准备2.1 视音频采集在节目编辑制作之前,我们首先要获得相关的媒体素材,最常用的方法是使用录像机或摄像机回放磁带,输出的信号经过非编中的硬件板卡进行处理,转变为可以编辑的素材。

Flexsim 软件的基本操作第1步:在模型中生成一个实体从左边的实体库中拖动一个发生器到模型(建模)视窗中。
具体操作是,点击并按住实体库中的实体,然后将它拖动到模型中想要放置的位置,放开鼠标键。
这将在模型中建立一个发生器实体,如下图所示。
一旦创建了实体,将会给它赋一个默认的名称,例如发生器(Source#,数字#为自从Flexsim应用软件打开后所生成的实体数)。
在以后定义的编辑过程中,可以对模型中的实体进行重新命名。
第2步:在模型中生成更多的实体从实体库中拖动一个暂存区实体放在发生器实体的右侧。
再从库中拖动3个处理器实体放在暂存区实体的右侧,如下图所示。
第3步:完成在模型中生成实体再拖出一个暂存区、一个处理器和一个吸收器实体放到模型中。
第4步:连接端口下一步是连接端口来安排临时实体的逻辑路径。
要连接一个实体的输出端口至另一个实体的输入端口,按住键盘上的“A”键,然后点击第一个实体并按住鼠标左键,拖动鼠标到下一个实体然后放开鼠标键。
将会看到拖动出一条黄色连线,放开鼠标键时,会出现一条黑色的连线。
首先,连接发生器到第一个暂存区。
然后连接此暂存区和每个处理器。
再连接每个处理器到第二个暂存区。
然后连接第二个暂存区到检验处理器。
然后连接检验处理器到吸收器,并连接到模型前端的第一个暂存区。
先连接检验处理器到吸收器,然后到第一个暂存区。
现在此模型的连接应如下图所示。
下一步是改变各实体的参数,以使它们按模型的描述来工作。
这里从发生器开始一直到吸收器逐个修改参数。
详细设计模型每个实体有它自己的参数视窗。
数据和逻辑会由此视窗添加到模型中。
双击一个实体进入该实体参数视窗。
在这个模型中,我们需要让3种不同的产品类型进入系统。
要完成这一要求,每个临时实体的类型(见Flexsim术语中“临时实体类型”的描述)将按照均匀分布被随机分配一个1到3之间的整数值。
这由发生器的出口触发器来完成。
第5步:给发生器指定临时实体的到达速率双击该发生器打开它的参数视窗。
(内部教学资料请勿外传)请勿外传)Vensim软件建模指导手册1.简介Vensim是一种可视化建模工具,利用这种工具可以将系统动力学的模型概念化和文档化,并能对模型进行仿真、分析和优化。
Vensim提供了简单而灵活的建模方式来绘制因果关系图和积量与流量图并在图上进行仿真。
Vensim通过文字以及文字间的箭头来表示和记录系统变量间的因果关系。
在此基础上,使用公式编辑器来完成仿真模型的建立。
在使用Vensim建模的过程中可以分析所建立的模型,包括变量的使用及其因果关系和因果关系环路。
当一个可用于仿真模型建立起来以后,可以使用Vensim深入研究模型的行为。
Vensim是系统动力学研究领域应用最广泛的建模和仿真软件。
包含了系统动力学研究中的几乎所有标准函数。
V ensim包含多个版本,其中PLE版本是专门为教学设计的简化版本,可以免费使用。
Vensim PLE可以从Ventana Systems公司的主页下载,网址为:。
本手册通过建立一个反映劳动力和库存关系的系统动力学模型,并利用这个模型进行仿真,来介绍一个完整建模过程。
这个模型展示了库存管理策略和劳动力雇用策略可以导致生产的不稳定。
2.进入Vensim PLE从开始菜单进入Vensim PLE,如图2.1所示。
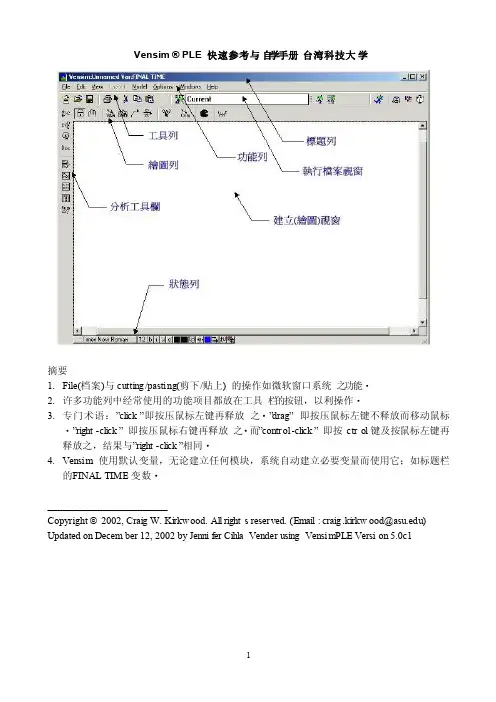
图2.1 进入Vensim PLE进入后主界面如图2.2所示。
这个界面可以看作是带有一系列工具的绘图工作台。
Vensim 窗口的主界面以绘图区域为主,包括标题栏、菜单栏、工具栏和分析工具等。
如果在Vensim 中打开一个模型(如图2.2)则绘图工具栏和状态栏也会出现。
图2.2 Vensim主界面标题栏:显示当前打开的模型文件名称和选中的变量名称。
菜单栏:菜单栏是上下文敏感的,具体内容根据打开的模型和正在进行的操作有所变化。
大多数常用的菜单命令列在了快捷工具栏中。
工具栏:工具栏中的按钮是常用的菜单项和仿真命令。
分为3组,从左到右依次是:文件操作命令、仿真命令和控制命令。
SAVINGS AND INCOMEeffort 因果循环图快速自学手册使用以下步骤,建立如上因果循环图:1.启动Vensim ,在工具列点选New Model ,显示”Model Settings Time Bounds”对话窗口,再点选”OK”钮即显示空白窗口,就可以开始绘制因果循环图。
2.设定此绘图字型为Arial 大小为10点,操作如下:在状态列的左边点选字型名称。
因为尚未选取任何项目,所以显示是否要更改预设字型与颜色,点选”Yes”键,则显示”View Defaults” 对话窗口,改变”Face”为Arial 与”Size”为10,然后点选”OK”钮即可。
3.点选绘图列下的”Variable – Auxiliary/Constant” (“变量-辅助量/常量”)工具,然后在绘图工作区空白窗口,点选一个地方来放置变量”interest”,此时显示编辑框框,输入”interest”再按”Enter”键即可显示字号为Arial 10的”interest”。
重复此步骤来建立变量”savings”与”income”如上图。
(提示:如果拼错变量名称,则点选”Variable – Auxiliary/Constant”工具钮,再点选拼错变量的名称,此时显示编辑框框更改之即可。
如果想要完全删除变量或绘图区的其它组件,则点选绘图列下的”Delete”工具钮,再点选它们即可完全删除。
4.重复以上步骤来建立变量”work effort” 如上图。
此时”work” 与“effort”显示在同一列,若要将它们放在不同列,则拖曳手把(小圆圈)至左下即可调整之。
如果要改变其它特性,就按鼠标右键或同时按”control”、鼠标左键与点选”work effort”,则显示对话窗口,它提供变量多样的选择。
在对话窗口左上方,”Shape”标签选取”Clear Box”,所拖曳的小圆圈是改变”work effort”形状的手把。