哈工大遥感图像配准报告
- 格式:doc
- 大小:1.15 MB
- 文档页数:10
1.实习目的:遥感图像的配准2.实习内容:2.1掌握ENVI自定义坐标,以及基于地形图的遥感影像配准过程。
2.2本次实习中带有地理坐标的西安市城区地形图被用作基准影像,对资源三号全色影像进行配准。
在此基础上,以纠正后的全色影像为基准,校正资源三号多光谱影像,用于下节的图像融合。
3.实习步骤:3.1 基于地形图配准全色影像的具体操作步骤:3.1.1 打开并显示资源三号全色影像与地形图1)从ENVI主菜单中,选择File → Open Image File。
加载地形图文件和全色影像到可用波段列表Available Bands List中;2)点击Load RGB将地形图加载到显示窗口display#1;3)在可用波段列表Display #1下拉菜单,点击New Display按钮,并从下拉式菜单中选择New Display。
点Load RGB按钮,将全色影像加载到一个新的显示窗口display#2。
3.1.2 修改地形图头文件中的地图信息由于地形图为西安80坐标系,而ENVI系统自带的投影文件中并没有相关基准面和椭球体,因此打开的地形图无法正确显示地图信息Map Info;1)定义椭球体,进入ENVI安装目录:C:\Program Files\ITT\IDL71\products\envi47\ map_proj,打开椭球体文件ellipse.txt,在最后一行增加IAG-75,6378140.0, 6356755.3;2)定义基准面,在相同的目录,打开基准面文件datum.txt文件,在最后一行增加D_Xian_80,IAG-75,0,0,0;3)在可用波段列表中,右键点击地形图文件,选择Edit Header,从弹出的窗口的EditAttributes的下拉箭头中选择Map Info,进入Edit Map Information。
输入图像左上角XY 坐标与像素大小;选择Change Proj,新建投影,输入相关参数3.1.3影像配准1)从ENVI主菜单栏中,选择Map → Registration → Select GCPs: Image to Image;2)在Image to Image Registration对话框中,点击并选择Display #1 (地形图),作为BaseImage。
《遥感原理与应用》课程Remote Sensing Principle and Application黑龙江工程学院·测绘工程学院2016年10月目录实验一ENVI软件安装与基本功能操作 (3)实验二影像的地理坐标定位和校正 (18)实验三图像融合、镶嵌、裁减 (28)实验四遥感图像分类 (35)加载一幅灰阶影像链接两个显示窗口:图2-1:Interactive Stretching对话框图2-2:ENVI Color Tables对话框图2-4:Cursor Location/Value对话框,显示了所选像素的屏幕值和数据值2.要关闭该对话框,从对话框的下拉菜单中,选择File →Cancel。
交互式的滤波处理ENVI给用户提供了对影像显示窗口进行一些预定义或者自定义的滤波处理的能力(对文件进行滤波处理也可以达到这种效果,它可以通过ENVI主菜单中的Filter 菜单来访问)。
下面的例子将展示如何对主影像窗口中的影像进行预定义的滤波处理。
选择滤波1.从主影像窗口菜单栏中,选择Enhance →Filter,并从下拉菜单中,选择所需的滤波类型,然后将该滤波应用到所显示的影像上。
2.尝试对所显示的影像进行不同的锐化、平滑和中值滤波。
在第二个显示窗口中打开影像并应用不同的滤波1.从可用波段列表对话框底部的下拉菜单中,选择Display #1 →New Display5-4:输出影像地图的Output Display to Postscript)如果有一个大比例的绘图仪,那么将Page页大小改为绘图大小,缩放的影像Postscript文件,该文件能按比例直接绘制在绘图仪上。
注意:只有在能打印彩色输出,并且能使用操作系统标准程序来打印输出文件的前提下,才能创建Postscript文件。
,保存postscript打印设置。
如果不能打印彩色输出,点击5-6:影像到影像配准中所用的Image to Image GCP LIst图5-7:Registration Parameters对话框bldr_tm1.wrp,点击OK。
一、实验名称遥感图像几何精纠正二、实验目的理解几何校正的原因,几何校正的原理,掌握用ENVI对影像进行几何校正的方法;了解整个实验的过程以及实验过程中要注意的事项。
三、实验原理由各种内外因素造成的遥感图像几何位置上的变化称为几何畸变,消除或者减弱其影响的过程即几何校正的过程。
试验中主要是通过若干控制点,建立不同图像间(基准影像和待纠正影像)的多项式空间变换和像元插值运算,实现遥感图像与实际地理图件间的配准 ,达到消减以及消除遥感图像的几何畸变。
几何校正又可分为影像到影像及影像到地图的配准。
四、数据来源本次实验所用数据来自于国际数据服务平台;landsat4-5波段30米分辨率TM 第三波段影像,投影为WGS-84,影像主要为山西省大同市恒山地区,中心纬度:38.90407 中心经度:113.11840。
五、实验过程1、打开并显示Landsat TM 影像文件1)打开并显示TM影像文件,从ENVI 主菜单中,选择File →Open Image File选择影像,点击Load Band 在主窗口加载影像。
2)新建主窗口,加载待校正影像(原图像偏转90度后所形成图像)。
《遥感数字图像处理》实验报告学号:姓名:邢晓辉(cuit)2、选取并处理地面控制点1)从ENVI 主菜单栏中,选择Map →Registration →Select GCPs: Image to Image,打开Image to Image Registration 对话框。
2) 在Image to Image Registration 对话框中,点击并选择Display #1 (SPOT 影像),作为Base Image。
点击Display #2(TM 影像),作为Warp Image。
3)点击OK,启动配准程序。
通过将光标放置在两幅影像的相同地物点上,来添加单独的地面控制点,在每个缩放窗口所需位置上,点击鼠标左键,调整光标点所处的位置。
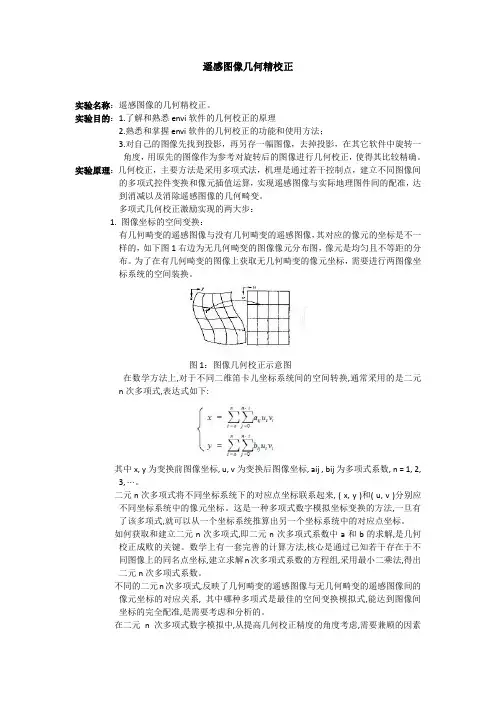
遥感图像几何精校正实验名称:遥感图像的几何精校正。
实验目的:1.了解和熟悉envi软件的几何校正的原理2.熟悉和掌握envi软件的几何校正的功能和使用方法;3.对自己的图像先找到投影,再另存一幅图像,去掉投影,在其它软件中旋转一角度,用原先的图像作为参考对旋转后的图像进行几何校正,使得其比较精确。
实验原理:几何校正,主要方法是采用多项式法,机理是通过若干控制点,建立不同图像间的多项式控件变换和像元插值运算,实现遥感图像与实际地理图件间的配准,达到消减以及消除遥感图像的几何畸变。
多项式几何校正激励实现的两大步:1. 图像坐标的空间变换:有几何畸变的遥感图像与没有几何畸变的遥感图像,其对应的像元的坐标是不一样的,如下图1右边为无几何畸变的图像像元分布图,像元是均匀且不等距的分布。
为了在有几何畸变的图像上获取无几何畸变的像元坐标,需要进行两图像坐标系统的空间装换。
图1:图像几何校正示意图在数学方法上,对于不同二维笛卡儿坐标系统间的空间转换,通常采用的是二元n次多项式,表达式如下:其中x, y为变换前图像坐标, u, v为变换后图像坐标, aij , bij为多项式系数, n = 1, 2,3, ⋯。
二元n次多项式将不同坐标系统下的对应点坐标联系起来, ( x, y )和( u, v )分别应不同坐标系统中的像元坐标。
这是一种多项式数字模拟坐标变换的方法,一旦有了该多项式,就可以从一个坐标系统推算出另一个坐标系统中的对应点坐标。
如何获取和建立二元n次多项式,即二元n次多项式系数中a和b的求解,是几何校正成败的关键。
数学上有一套完善的计算方法,核心是通过已知若干存在于不同图像上的同名点坐标,建立求解n次多项式系数的方程组,采用最小二乘法,得出二元n次多项式系数。
不同的二元n次多项式,反映了几何畸变的遥感图像与无几何畸变的遥感图像间的像元坐标的对应关系, 其中哪种多项式是最佳的空间变换模拟式,能达到图像间坐标的完全配准,是需要考虑和分析的。
图像配准实验报告图像配准实验报告引言:图像配准是计算机视觉领域的重要研究方向,它涉及将多个图像或视频序列对齐以实现对比分析。
图像配准技术在医学影像、遥感图像、计算机图形学等领域具有广泛的应用。
本实验旨在探究不同配准算法在图像配准任务中的效果和性能。
一、实验背景图像配准是指将不同图像或图像序列的特定特征点对齐,使它们在空间上保持一致。
图像配准可分为刚体变换、仿射变换和透视变换等不同类型,具体方法包括特征点匹配、直接法和基于优化的方法等。
本实验选取了常用的特征点匹配方法进行研究。
二、实验过程1. 数据准备从开源数据集中选取了一组包含平移、旋转和缩放等不同变换的图像。
这些图像包含了不同场景和角度,以模拟实际应用场景。
2. 特征提取与匹配采用SIFT(尺度不变特征变换)算法提取图像的特征点。
SIFT算法通过检测图像中的关键点,并计算每个关键点的特征描述子。
接着使用FLANN(快速最近邻搜索库)进行特征点匹配。
FLANN算法能够高效地在大规模数据集中进行最近邻搜索,提高了匹配的准确性和速度。
3. 图像配准基于特征点匹配结果,采用RANSAC(随机抽样一致性)算法估计图像之间的变换矩阵。
RANSAC算法通过随机选择特征点子集,估计出最佳的变换模型,排除了异常点的干扰。
4. 实验结果评估使用均方差(MSE)和结构相似度指数(SSIM)等指标对配准结果进行评估。
MSE用于衡量图像之间的差异,SSIM则考虑了亮度、对比度和结构等因素,更适合图像质量评估。
三、实验结果与讨论经过特征提取和匹配,我们得到了一系列图像配准的结果。
通过计算MSE和SSIM指标,我们对不同配准算法的性能进行了比较。
1. 刚体变换配准刚体变换是一种刚性的平移、旋转和缩放变换。
通过对特征点进行刚体变换配准,我们得到了较好的配准结果。
MSE和SSIM指标表明,刚体变换配准在保持图像结构和内容一致性方面表现出色。
2. 仿射变换配准仿射变换是一种保持直线和平行性质的变换。
《遥感图像处理A》
实验报告
学期13- 14学年第2学期
专业
班级
学号
姓名
任课教师
苏州科技学院
环境科学与工程学院
实验报告1 ERDAS Viewer的使用实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告2 卫星影像及航空影像的几何校正
实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告3 雷达图像的几何纠正实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告4 空间增强处理与辐射增强处理
实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告5 傅立叶变换实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告6 彩色增强与图像运算实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告7 多光谱增强实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告8 非监督分类实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告9 监督分类实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
实验报告10 空间建模与实践实验地点日期
一、目的
二、要求
三、方法与详细步骤
四、实验成果
11。
哈工大数字图像处理实验报告(共10篇) 数字图像处理实验报告实验报告书实验类别数字图像处理学院信息工程学院专业通信工程班级通信1005班姓名叶伟超指导教师聂明新2013 年 6 月 3 日篇二:数字图像处理实验报告(全部)数字图像处理实验指导书125 200912512 班级:学号:姓名:田坤专业:电子信息科学与技术实验一数字图像的运算一.实验目的1.熟悉matlab图像处理工具箱及直方图函数的使用;2.理解和掌握直方图原理和方法;二.实验设备:1.PC机一台;2.软件matlab。
三.程序设计在matlab环境中,程序首先读取图像,然后调用直方图函数,设置相关参数,再输出处理后的图像。
I=imread('cameraman.tif');%读取图像subplot(1,2,1),imshow(I)%输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题四.实验步骤1. 启动matlab双击桌面matlab图标启动matlab环境;2. 在matlab命令窗口中输入相应程序。
书写程序时,首先读取图像,一般调用matlab自带的图像,如:cameraman图像;再调用相应的直方图函数,设置参数;最后输出处理后的图像;3.浏览源程序并理解含义;4.运行,观察显示结果;5.结束运行,退出;五.实验结果:观察图像matlab环境下的直方图分布。
(a)原始图像(b)原始图像直方图六.实验报告要求1、给出实验原理过程及实现代码:I=imread('coins.png');%读取图像subplot(1,2,1),imshow(I)%输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题2、输入一幅灰度图像,给出其灰度直方图结果,并进行灰度直方图分布原理分析。
实验二遥感图像的几何校正与镶嵌实验报告实验目的:通过本实验熟练操作遥感图像处理的专业软件进行基础图像处理,包括图像几何校正、镶嵌等。
实验容:1、熟悉图像几何校正、镶嵌的基本原理;2、学习图像几何校正具体操作;3、学习图像镶嵌正具体操作。
本实验的图像几何校正是通过“像图配准”的方式获取地面控制点的方里网坐标的,并对传统的从纸质地形图上量算坐标的方法进行改进,利用Auto CAD或Photoshop等软件从扫描后的电子地形图上直接量算坐标。
实验步骤:第一步、熟悉图像几何校正、镶嵌的基本原理第二步、图像几何校正运行PCI,选择GCPWorks模块,在Source of GCPs选择User Entered Coordinates(用户输入投影坐标系统),点击Accept后,弹出校正模块:选择第一项加载需要校正的图像(由实验一方法导出的125-42.pix)->点击Default->Load & Close->得到下图:选择第二项,选择Other确定投影系统:注意输入6度带的中央经度与向东平移500公里(500000米):点击Earth Model确定地球模型:点击Accept:选择第三项采集地面控制点。
在采集地面控制点之前,利用Photoshop软件打开扫描后的电子地形图。
分别在遥感图像和地形图中找到一个同名点,如下图(可以用放大遥感图)。
然后在地形图中量算出该点的坐标,精确到米,X坐标为6位(要去掉2位6度带的带号),Y坐标7位(运用测出)。
再将坐标输入到GCP编辑窗口中,并点击Accept as GCP接受为一个控制点。
用同样的方法采集更多的地面控制点。
注意:前三个点不显示误差,从第四个点开始才出现误差。
一般要求选择15个以上控制点,并且各点的误差<1个像元,将误差过大的点删除,直到误差<1个像元为止。
最后,关闭GCP编辑窗口,选择第五项(如果对整个图像进行几何校正,则第四项可以省略),执行几何校正。
Harbin Institute of Technology多时相遥感图像配准实验报告课程名称:遥感信息处理导论院系:电子与信息工程学院姓名:学号:授课教师:哈尔滨工业大学1. 实验目的对于通过遥感平台获取的遥感数字影像,由于扫描过程中受地球曲率、地球自转、平台姿态、扫描方式等因素的影响,所获取的图像往往会产生不同程度的几何误差,这些误差如若不经处理,对图像的后续应用如分类、目标检测等会产生很大影响。
本实验的目的就是利用多项式映射和重采样等方法对两幅不同时间采集的遥感图像进行几何校正处理,从而方便从配准图像中找到不同时相内发生变化的地物目标信息。
2. 实验原理图像的配准过程主要可以分为三个过程:控制点对选取(自动或手动)、坐标映射函数拟合、映射后像素重采样。
1) 控制点对选取对于图像匹配过程,首先要通过控制点对建立两幅图像间的坐标联系。
控制点的选取有可分为自动和手动两种方式。
对于自动选取,可以采用SIFT 等算法实现;对于手动选取,需要实验人员通过目测观察的方法找到不同时相的遥感图像中的相同目标,这些控制点可以是建筑物的顶点、道路等的交叉点等或其他较容易分辨的位置。
选出控制点后将这些点的坐标信息记录下来,值得注意的是所选控制点的数量、分布情况以及精度会直接影响配准结果的精度和质量。
2) 图像几何校正图像的配准实质上就是通过图像的几何校正,将产生几何失真的图像转换为标准的数字图像。
采用的方法就是通过一定的映射函数将原图像的像素坐标转换为标准图像中的坐标(,)u f x y = (,)v g x y =其中(,)x y 表示原图像中的像素坐标值,(,)u v 表示参考图像中的像素坐标值。
映射函数的选择可以有多种形式,一般较为简单常用的是多项式函数,以二次多项式函数为例,映射函数的具体形式为2201234522012345u a a x a y a xy a x a y v b b x b y b xy b x b y⎧=+++++⎨=+++++⎩ 其中,05,,a a ,05,,b b 分别表示二次多项式横纵坐标映射函数中对应项的系数,通过选定控制点,可以将这些系数项求解出来。
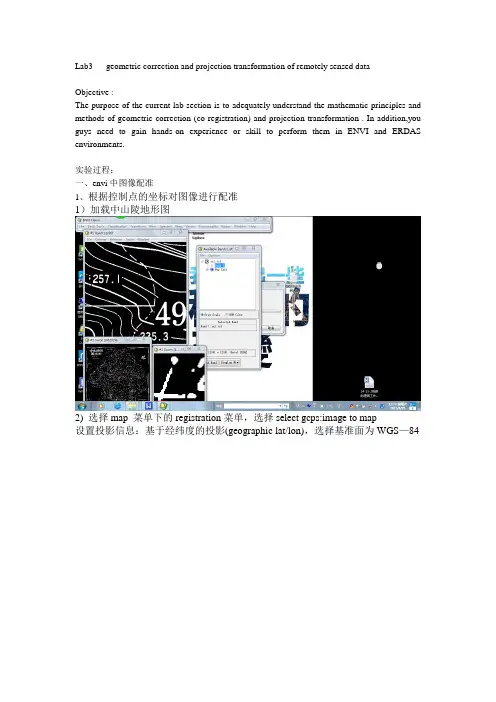
Lab3 geometric correction and projection transformation of remotely sensed dataObjective :The purpose of the current lab section is to adequately understand the mathematic principles and methods of geometric correction (co-registration) and projection transformation . In addition,you guys need to gain hands-on experience or skill to perform them in ENVI and ERDAS environments.实验过程:一、envi中图像配准1、根据控制点的坐标对图像进行配准1)加载中山陵地形图2) 选择map 菜单下的registration菜单,选择select gcps:image to map设置投影信息:基于经纬度的投影(geographic lat/lon),选择基准面为WGS—843)开始配准依次移动一级窗口中的光标到四个图廓点的位置,在三级放大窗口中把十字司放在经纬线的交点的中间位置,输入该点的经纬度于编辑对话框中:点击add point,完成对控制点的编辑4)选择option菜单下的wrap file将配准好的地图生成一幅新的影像修改生成图像信息,改为50带的UTM投影,基准面为WGS-84,保存2、图像到图像的配准1)加载全色波段影像作为待配准的影像将配准好的地形图作为基准图,全色影像作为要配准的图像在两幅图像上选择5个同名地物点进行配准点击show list 查看误差,不断调整误差直至所有误差在1以内二、erdas中的配准1、打开erdas,将zsl.tiff格式的数据导为erdas.img2、viewer中打开刚刚保存的图像,选择data preparation中的配准image geometric correction点击select viewer,点击下图层,选择polynomial多项式模型点击ok,修改投影Set projection from GCP tool,选择手动输入“keyboard”将4个图廓点的坐标输入表格display,保存图像,并加载,对配准后的图像进行投影修改3、图到图的配准以刚刚配准好的地形图为基准,加载多光谱图像选择data preparation中的配准image geometric correction选择地形图作为基准面,多光谱图像为待配准影像将相同点的坐标输入表格,并调整误差4、图像裁剪创建感兴趣区域,AOI下Tools创建一个任意形状的区域后,双击保存区域。
遥感图片的处理实验报告******大学测绘工程***专业《遥感原理及应用》实验报告班级:学号:姓名:指导老师 :实验室:1实验一 ENVI 视窗的基本操作一、实验的目的初步了解目前主流的遥感图象处理软件 ENVI 的主要功能模块,在此基础上,掌握视窗操作模块的功能和操作技能,为遥感图像的几何校正等后续实习奠定基础。
二、实验软件与数据软件:Envi遥感图像处理软件。
数据:重庆地区UTM第八波段数据。
三、实验方法与步骤Envi软件的主菜单:此菜单包含基本工具。
四、实验体会与建议体会:初步了解了ENVI 的主要功能和各个模块,ENVI 用户界面由小部件(widgets) 或控件(controls) 构成。
小部件是 GUI 的组装部件––––它们允许你通过点击、输入文本、或选择,以与程序交互。
选项由菜单组成,这些菜单由小部件构成。
选择某个菜单项可以弹出一个对话框,它要求用户输入和交互。
建议:好多基本操作还是不太会,也不知道该怎么下手去做,要是有具体操作手册、操作步骤就会好多了。
2实验二遥感图像的几何校正一、实验的目的通过实习操作,掌握遥感图像几何校正的基本方法和步骤,深刻理解遥感图像几何校正的意义二、实验软件与数据软件:Envi遥感图像处理软件。
数据:重庆地区UTM第八波段数据以及未经校核的重庆地区jpg图片。
三、实验方法与步骤1、显示图像文件。
首先在 ERDAS 图标面板中点击viewer图表两次,打开两个视窗(viewer1/viewer2),并将两个视窗平铺放置,如下:ERDAS图表面板菜单条:session—title viewers然后,在viewer 1中打开需要校正的lantsat图像:重庆城区.jpg2、选择校正与镶嵌菜单下的校正图像选取控制点3单击Show List按钮查看所选控制点的信息43、在控制点选择窗口中选择options菜单,再选择warp file,选择输出校正后的图像文件。
第1篇一、实验背景与目的随着遥感技术的不断发展,遥感影像已成为获取地球表面信息的重要手段。
遥感影像处理是对遥感影像进行一系列技术操作,以提高影像质量、提取有用信息的过程。
本实验旨在通过实践操作,让学生掌握遥感影像处理的基本原理和常用方法,提高学生对遥感影像数据的应用能力。
二、实验内容与步骤本次实验主要包括以下内容:1. 数据准备:获取实验所需的遥感影像数据,包括光学影像、红外影像等。
2. 影像预处理:对原始遥感影像进行辐射校正、几何校正、图像增强等处理。
3. 影像分割:对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类:对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析:对分类结果进行分析,评估分类精度。
三、实验步骤1. 数据准备- 获取实验所需的遥感影像数据,包括光学影像、红外影像等。
- 确保影像数据具有较好的质量和分辨率。
2. 影像预处理- 辐射校正:对原始遥感影像进行辐射校正,消除大气、传感器等因素对影像辐射强度的影响。
- 几何校正:对原始遥感影像进行几何校正,消除地形起伏、地球曲率等因素对影像几何形状的影响。
- 图像增强:对预处理后的影像进行图像增强,提高影像对比度、清晰度等。
3. 影像分割- 选择合适的分割方法,如基于阈值分割、基于区域生长分割、基于边缘检测分割等。
- 对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类- 选择合适的分类方法,如监督分类、非监督分类等。
- 对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析- 对分类结果进行分析,评估分类精度。
- 分析分类结果中存在的问题,并提出改进措施。
四、实验结果与分析1. 影像预处理结果- 经过辐射校正、几何校正和图像增强处理后,遥感影像的质量得到显著提高,对比度、清晰度等指标明显改善。
2. 影像分割结果- 根据实验所采用的分割方法,成功提取了感兴趣的目标区域,分割效果较好。
3. 影像分类结果- 通过选择合适的分类方法,对分割后的影像进行分类,成功识别了不同的地物类型。
遥感图像校正实验报告1. 引言遥感图像是通过卫星、飞机等遥感平台获取的地球表面的图像信息,具有广泛的应用价值。
然而,由于地球表面的复杂性和遥感平台的特点,遥感图像中可能存在各种影响因素,如大气、地形、光照等。
为了准确地利用遥感图像进行地物分类、资源监测等应用,需要对遥感图像进行校正。
本实验旨在探索并应用遥感图像校正方法,提高遥感图像的质量和准确度。
2. 实验目标本实验的主要目标是:- 理解遥感图像校正的原理和流程;- 掌握遥感图像校正的常用方法;- 运用所学的遥感图像校正方法,对实验数据进行校正,并评估校正效果。
3. 实验步骤3.1 数据准备本实验使用的遥感图像数据是卫星传感器获得的多光谱图像,包含了红、绿和蓝三个波段的数据。
数据提供了RAW格式的图像文件,需要进行预处理和格式转换,以便进行后续的遥感图像校正实验。
3.2 大气校正大气是遥感图像中主要的影响因素之一,大气校正是遥感图像校正中的重要步骤。
本实验采用了大气校正模型,通过计算大气透射率和反射率,对图像进行校正。
3.3 辐射校正辐射校正是遥感图像校正的另一个重要步骤,其目的是消除图像中的辐射差异,使得不同波段的图像能够进行有效的比较和分析。
本实验使用了辐射校正模型,通过计算辐射矫正系数,将原始图像转换为辐射校正后的图像。
3.4 几何校正几何校正是遥感图像校正的最后一步,其目标是消除图像中的几何形变,使得图像中的特征能够准确地对应地面的实际位置。
本实验使用了几何校正模型,通过对图像进行平移、旋转和缩放等操作,实现图像的几何校正。
4. 实验结果和讨论经过上述的步骤,我们成功地对实验数据进行了遥感图像校正。
校正后的图像显示出更好的质量和准确度,可以更好地用于地物分类和资源监测等应用。
然而,值得注意的是,遥感图像校正是一个复杂的过程,涉及到多个影响因素和数学模型。
在实际应用中,应根据具体需求和数据特点,选择合适的校正方法和参数,以达到最佳的校正效果。
ENVI遥感图像配准一、实验目的:1、掌握ENVI软件的基本操作和对图像进行基本处理,包括打开图像,保存图像。
2、初步了解图像配准的基本流程及采用不同校准及采样方法生成匹配影像的特点。
3、深刻理解和巩固基本理论知识,掌握基本技能和动手操作能力,提高综合分析问题的能力。
二、实验原理(1)最邻近法最邻近法是将最邻近的像元值赋予新像元。
该方法优点是输出图像仍然保持原来图像的像元值,简单,处理速度快。
缺点就是会产生半个像元位置偏移,可能造成输出图像中某些地物的不连贯。
适用于表示分类或某种专题的离散数据,如土地利用,植被类型等。
双线性内插方法是使用临近4个点的像元值,按照其距内插点的距离赋予不同的权重,进行线性内插。
该方法具有平均化的滤波效果,边缘受到平滑作用,而产生一个比较连贯的输出图像,其缺点是破坏了原来的像元值,在后来的波谱识别分类分析中,会引起一些问题。
示意图:由梯形计算公式:故同理最终得:三次卷积内插法是一种精度较高的方法,通过增加参与计算的邻近像元的数目达到最佳的重采样结果。
使用采样点到周围16邻域像元距离加权计算栅格值,方法与双线性内插相似,先在Y 方向内插四次(或X 方向),再在X 方向(或Y 方向)内插四次,最终得到该像元的栅格值。
该方法会加强栅格的细节表现,但是算法复杂,计算量大,同样会改变原来的栅格值,且有可能会超出输入栅格的值域范围。
适用于航片和遥感影像的重采样。
作为对双线性内插法的改进,即“不仅考虑到四个直接邻点灰度值的影响,还考虑到各邻点间灰度值变化率的影响”,立方卷积法利用了待采样点周围更大邻域内像素的灰度值作三次插值。
其三次多项式表示为:我们可以设需要计算点的灰度值f(x,y)为:其中:计算后可得出:(4)算法比较示意图:三、实验内容:1、熟练使用ENVI软件的基本操作和对图像进行基本处理,包括打开图像,保存图像。
2、初步了解学会图像处理的基本流程。
3、手动选择控制点,对所给的两幅图像bldr_tm.img和bldr_sp.img 进行精确配准。
遥感图像的正射校正
实验报告
一、实验目的
通过实习操作,掌握遥感图像正射校正的基本原理和和方法,理解遥感图像正射校正的意义。
二、实验环境
操作系统:Windows XP
软件:ENVI4.7
三、实验内容
首先打开实验数据,数据图显示如下:
进行正射校正,进行如下的操作,选择第二种模式
通过导进外部测量控制点来进行控制点的采样工作
找到扩展名为.pts的文件导进去,点击show list查看控制点的选择精度
点击predict查看控制点的分布状况
进行如下选择进行正射校正工作
点击确定即可,在弹出来的对话框中点击select dem file按钮,导入一个dem数据
点击ok即可,对剩下来的对话框进行如下所示的设置,修改一些参数,如下图:
点击确定按钮即可
对于正射校正好的图像进行和原始数据图像进行比较,在原始图像上右击,选择第二个选项
在弹出来的对话框中进行如下修改:
选择一个点对正射校正过的图像和原始数据图像进行比较,看看那里不同
四、实验总结
从实验看出,ENVI的正射校正功能具有操作简单、灵活和支持的传感器多等特点。
遥感图像处理实验报告(2013 —2014 学年第1学期)实验名称:实验时间:实验地点:指导教师:专业班级:姓名:学号:一:实验目的掌握ENVI的图像配准与几何校正工具使用方法。
二:实验内容通过ENVI的图像配准与几何校正工具,将两副同一地区不同传感器的图像进行配准。
手动选择GCPs,输出配准后的图像和GCPs的误差信息。
三:实验平台Windows XP Professional SP3ENVI4.5四:实验步骤1:启动ENVI4.5,选择File->Open Image File,打开文件westconcordaerial.png2:在Available Bands List对话框中,选择Load RGB,打开westconcordaerial.png的三个显示窗口3:在Available Bands List对话框中,选择New Display,重复步骤1-2;打开westconcordorthophoto.png的三个显示窗口4:在ENVI4.5工具栏中,选择Map->Registration->Select GCPs: Image to Image5:在弹出的Image to Image Registration对话框中,在Base Image列表中,选定Display #1作为参考影像,在Warp Image列表中,选定Display #2作为待纠正影像6:点击OK按钮,弹出Ground Control Points Selection对话框7:在参考影像与待纠正影像的Zoom显示窗口,分别将十字丝待定至对应的特征地物点作为控制点(GCP),然后在Ground Control Points Selection对话框中按下Add Point 按钮。
重复上述操作,添加足够多的控制点。
8:在Ground Control Points Selection对话框中,点击Show List按钮,可弹出Image to Image GCP list对话框,列出了在步骤7中选定的GCP列表及相应的误差信息。
Harbin Institute of Technology多时相遥感图像配准实验报告课程名称:院系:姓名:学号:授课教师:哈尔滨工业大学1.实验目的(1)了解图像配准原理、导致几何失真的原因及矫正方法(2)掌握两幅图像配准的基本方法(3)学会评价配准结果2.实验原理图像配准就是将不同时间、不同传感器或不同条件下(天候、照度、摄像位置和角度等)获取的两幅或多幅图像进行匹配、叠加的过程。
图像配准的基本过程是寻找把待配准图像中的点映射到参考图像中对应点的最佳变换,从而去除待配准图像和参考图像之间在几何上的不一致,如平移、旋转和形变,最终使得同一目标在不同的图像上具有相同的坐标位置。
图像配准中的主要问题就是确定这种映射关系,一般来讲我们将需要进行变换的图像成为输入图像或待配准图像,将用于矫正输入输入图像的图像成为参考图像。
图像配准的基本步骤包括:(1)特征提取:在进行图像配准之前根据实际需要选择图像中待匹配特征。
(2)特征匹配:在确定了来自不同图像的特征集后,建立特征的对应关系。
对应关系建立可以通过使用各种特征描述、相似性测量以及空间关联的方法实现。
(3)变换模型估计:通过估计或者最优搜索等方法得到映射函数的类型和参数,以便能够对齐待配准图像和基准图像。
(4)图像重采样和变换:依靠映射函数对输入图像进行图像变换,使用适当的插值算法计算出非整数点坐标的图像值。
常用的重采样方法包括:(1)最近邻重采样法:简单地选择其中心距图像上的点最近的实际像素,然后将这个像素变换到相应的显示网格上。
这种技术适用于新图像用于分类的情况,原因是该图像是由原始像素的亮度构成的,只是按照正确的几何关系将像素进行重新排列。
(2)双线性插值法:对于图像中与给定的显示网格位置对应点的周边四个像素使用三次线性插值。
(3)三次卷积插值法:利用周边16个像素,在图像中一点四周各取4个像素,利用三次多项式对这些像素确定的四条线对进行拟合以形成4个插值点,然后利用第5个三次多项式对这四个插值点进行拟合,最终合成在显示网格对应位置的亮度值。
利用抽样定理以及由一个离散样本集构建连续函数的方法,可以推导出用于插值的多项式的实用形式。
3.实验步骤(1)实验图像为:参考图像待配准图像(2)选取控制点,一共手动选取了20个控制点对:(3) 双线性映射模型为:12345678x c v c w c vw c y c v c w c vw c =+++=+++利用最小二乘法计算模型参数得:123456780.9995,0.0034,0.0000,58.90260.0008,0.9982,0.0000,53.5062c c c c c c c c ==-==-=-===2阶多项式映射模型为:2212345622789101112x c v c w c vw c v c w c y c v c w c vw c v c w c =+++++=+++++利用最小二乘法计算模型参数得:1234567891011120.9950,0.0093, 1.6155,7.4176, 1.36025,57.96760.0045, 1.0062, 1.98196,8.98226, 1.77005,52.3716c c c e c e c e c c c c e c e c e c ==-=-=-=-=-===-=--=--=(4) 获得配准结果:双线性映射模型:配准后图像参考图像二阶多项式映射模型:配准后图像参考图像4. 实验结果与分析选取10对同名点进行定量分析:双线性映射模型: x 方向标准差 y 方向标准差 综合标准差 0.60200.14000.6180二阶多项式映射模型:x方向标准差y方向标准差综合标准差0.6270 0.3352 0.7110由分析结果可以看出两种模型的处理效果并无明显区别,但在一些边缘部位如图中黄色方框所示,二阶多项式映射模型先比喻会产生一些杂散点。
从计算得的标准差来看,双线性模型优于二阶多项式模型,这是因为本次实验中两幅图片的差异主要由于几何平移与旋转造成,不存在扭曲等变化,使用双线性模型更合适,可以保证全局达到最优,而二阶多项式模型只能保证局部参考点最优。
5.实验程序clear all;close all;image1=imread('E:\遥感导论\实验一\subcut1.tif'); %参考图像image2=imread('E:\遥感导论\实验一\subcut2.tif'); %输入图像load('controlpoints.mat')load('testpoints.mat')%双线性模型n=size(fixedPoints_control,1);emin=1;sume=0;RMS=0;jianyan_point=[];jbase_point=[];C1=[];C2=[];for i=1:njianyan_point=fixedPoints_control(i,:);fixedPoints_control(i,:)=[];jbase_point=movingPoints_control(i,:);movingPoints_control(i,:)=[];d=ones(n-1,4);d(:,1)=fixedPoints_control(:,1);d(:,2)=fixedPoints_control(:,2);d(:,3)=fixedPoints_control(:,1).*fixedPoints_control(:,2);X=movingPoints_control(:,1);Y=movingPoints_control(:,2);C1(:,i)=(inv(d'*d))*d'*X;C2(:,i)=(inv(d'*d))*d'*Y;I=[jianyan_point(1,1),jianyan_point(1,2),jianyan_point(1,1)*jian yan_point(1,2),1];X_r=C1(:,i)'*I';Y_r=C2(:,i)'*I';e(i)=(jbase_point(1,1)-X_r)^2+(jbase_point(1,2)-Y_r)^2;if e(i)<eminC1_best=C1(:,i);C2_best=C2(:,i);emin=e(i);endif i>1;fixedPoints_control=[fixedPoints_control(1:i-1,:);jianyan_point;f ixedPoints_control(i:n-1,:)];movingPoints_control=[movingPoints_control(1:i-1,:);jbase_poi nt;movingPoints_control(i:n-1,:)];elsefixedPoints_control=[jianyan_point;fixedPoints_control(i:n-1,:)];movingPoints_control=[jbase_point;movingPoints_control(i:n-1, :)];endsume=sume+e(i); endRMS=sqrt(sume/n)eminC1_bestC2_bestimage1_1=image1(:,:,1);image2_1=image2(:,:,1);image3=zeros(512,512);for i0=1:512;for j0=1:512;I=[i0,j0,i0*j0,1];i=round(C1_best'*I');j=round(C2_best'*I');if (i<=0||j<=0||i>512||j>512)image3(j0,i0)=image1_1(j0,i0);elseimage3(j0,i0)=image2_1(j,i);endendendfigure(1)imshow(image3,[])title('配准后图像')figure(2)imshow(image1(:,:,1),[])title('参考图像')figure(3)imshow(image2_1,[])title('待配准图像')ex=[];ey=[];sumx=0;sumy=0;sum=0;for i=1:10;S=[fixedPoints_test(i,1),fixedPoints_test(i,2),fixedPoints_test(i,1 )*fixedPoints_test(i,2),1];M(i)=C1_best'*S';N(i)=C2_best'*S';ex(i)=movingPoints_test(i,1)-M(i);ey(i)=movingPoints_test(i,2)-N(i);sumx=sumx+ex(i)^2;sumy=sumy+ey(i)^2;sum=sum+ex(i)^2+ey(i)^2;endmsex=sqrt(sumx/10)msey=sqrt(sumy/10)mse=sqrt(sum/10)clear all;close all;image1=imread('E:\遥感导论\实验一\subcut1.tif'); %参考图像image2=imread('E:\遥感导论\实验一\subcut2.tif'); %输入图像% figure,imshow(image1,[])% title('参考图像'),axis on% figure,imshow(image2,[])% title('待配准图像'),axis oncpselect(image2,image1)load('controlpoints.mat') load('testpoints.mat')%二阶多项式模型n=size(fixedPoints_control,1); emin=1;sume=0;RMS=0;jianyan_point=[];jbase_point=[];C1=[];C2=[];for i=1:njianyan_point=fixedPoints_control(i,:);fixedPoints_control(i,:)=[];jbase_point=movingPoints_control(i,:);movingPoints_control(i,:)=[];d=ones(n-1,6);d(:,1)=fixedPoints_control(:,1);d(:,2)=fixedPoints_control(:,2);d(:,3)=fixedPoints_control(:,1).*fixedPoints_control(:,2);d(:,4)=fixedPoints_control(:,1).*fixedPoints_control(:,1);d(:,5)=fixedPoints_control(:,2).*fixedPoints_control(:,2);X=movingPoints_control(:,1);Y=movingPoints_control(:,2);C1(:,i)=(inv(d'*d))*d'*X;C2(:,i)=(inv(d'*d))*d'*Y;I=[jianyan_point(1,1),jianyan_point(1,2),jianyan_point(1,1)*jian yan_point(1,2),jianyan_point(1,1)*jianyan_point(1,1),...jianyan_point(1,2)*jianyan_point(1,2),1];X_r=C1(:,i)'*I';Y_r=C2(:,i)'*I';e(i)=(jbase_point(1,1)-X_r)^2+(jbase_point(1,2)-Y_r)^2;if e(i)<eminC1_best=C1(:,i);C2_best=C2(:,i);emin=e(i);endif i>1;fixedPoints_control=[fixedPoints_control(1:i-1,:);jianyan_point;f ixedPoints_control(i:n-1,:)];movingPoints_control=[movingPoints_control(1:i-1,:);jbase_poi nt;movingPoints_control(i:n-1,:)];elsefixedPoints_control=[jianyan_point;fixedPoints_control(i:n-1,:)];movingPoints_control=[jbase_point;movingPoints_control(i:n-1, :)];endsume=sume+e(i);end%RMS=sqrt(sume/n)eminC1_bestC2_bestimage3=zeros(512,512);for i0=1:512;for j0=1:512;I=[i0,j0,i0*j0,i0*i0,j0*j0,1];i=round(C1_best'*I');j=round(C2_best'*I');if (i<=0||j<=0||i>512||j>512)image3(j0,i0)=0;elseimage3(j0,i0)=image2(j,i);endendendfigure(1)imshow(image3,[])title('配准后图像')figure(2)imshow(image1,[])title('参考图像')figure(3)imshow(image2,[])title('待配准图像')ex=[];ey=[];sumx=0;sumy=0;sum=0;for i=1:10;S=[fixedPoints_test(i,1),fixedPoints_test(i,2),fixedPoints_test(i,1 )*fixedPoints_test(i,2),fixedPoints_test(i,1)*fixedPoints_test(i,1), ...fixedPoints_test(i,2)*fixedPoints_test(i,2),1];M(i)=C1_best'*S';N(i)=C2_best'*S';ex(i)=movingPoints_test(i,1)-M(i);ey(i)=movingPoints_test(i,2)-N(i);sumx=sumx+ex(i)^2;sumy=sumy+ey(i)^2;sum=sum+ex(i)^2+ey(i)^2;endmsex=sqrt(sumx/10)msey=sqrt(sumy/10)mse=sqrt(sum/10)。