发那科机器人本体更换电池
- 格式:pdf
- 大小:90.72 KB
- 文档页数:3

工业机器人测试题(附参考答案)一、单选题(共76题,每题1分,共76分)1.(机器人示教器上使能开关握紧为ON,松开为OFF状态,作为进而追加的功能,当握紧力过大时,为( )状态。
A、ONB、OFFC、急停报错D、不变正确答案:B2.(( )编程方式不占用机器人,可以使用软件工具在计算机上建模编程。
A、示教器示教编程B、离线编程C、在线编程D、自主编程正确答案:B3.(关于润滑剂的作用,下列说法错误的是()。
A、冷却降温B、降低摩擦C、减少磨损D、增大摩擦正确答案:D4.(工业机器人IO模块电源通常为( )。
A、48VB、24VC、12VD、36V正确答案:B5.(对于电气设备故障的一般处理方法下列说法错误的是()。
A、迅速切除故障点,继电保护未正确动作时应手动执行。
为了加速事故或故障处理进程,防止事故扩大,凡对系统运行无重大影响的故障设备隔离操作,可根据现场事故处理规程自行处理B、根据故障历史报警和画面信息显示、测量仪表指示、继电保护动作情况及现场检查情况,判断事故性质和故障范围并确定正确的处理方法C、当事故或故障对人身和设备造成严重威胁时,应留在现场解决问题,不能逃离现场D、进行针对性处理,逐步恢复设备运行正确答案:C6.(焊缝产生收弧部位有集中气孔和气泡,焊缝周围产生黄色烟熏,排查解决方法有误的是()。
A、气压正常,流量正常,突然无焊接气体气体测试为零,无反应。
此时则需检查送丝机后的气体电磁阀开关,有时在机器人运转过程中,电磁阀线路易脱落B、检查控制柜与焊机通信线路是否损坏C、气压表显示正常,流量正常,喷嘴处只有少量气体喷出,无法形成有效地气体保护,须检查气体管道密封圈是否有漏气现象,各接头是否有松动或脱落漏气D、流量忽高忽低,减压阀表面结冰,此现象出现在CO2气体使用了氩气减压阀导致,由于CO2气体释放时,大量吸热,会使减压阀结冰,堵塞气路,此时应更换CO2专用加热减压阀;如没加热减压阀,则可采用暂停使用待减压阀温度回升或使用淋水升温的方法应急使用正确答案:B7.(.关于ABB 机器人故障代码3XXXX的描述准确的是()A、与系统硬件、工业机器人本体以及控制器硬件有关的信息B、与输入和输出、数据总线等有关的信息C、与控制工业机器人的移动和定位有关的信息D、与系统功能、系统状态相关的信息正确答案:C8.(在转速负反馈系统中,当开环放大倍数K增大时,转速降落△n将( )。
内部保密FANUC ROBODRILL @-T14*Fe FANUC ROBODRILL @-T21*Fe维修部件更换步骤书B-85168CM-1/01本说明书就下列机型进行说明。
机型名称简称FANUC ROBODRILL α-T14i FeFANUC ROBODRILL α-T21i Fe控制装置: A04B-0099-B202, B303, B304 FANUC Series 31i -A机构部 : A04B-0099-B101, B102, B103, B104,B111, B112, B113, B114 α-T14i Fe α-T21i Fe·本说明书的任何内容不得以任何方式复制。
·本机的外观和规格会随着改进而有所变更。
本说明书中所载的商品,属于基于《外汇及对外贸易法》的管制对象。
从日本将这些出口到其他国家时,必须获得日本国政府的出口许可。
此外,某些商品还受到美国政府的再出口管制。
出口本商品时请向我公司洽询。
我们试图在本说明书中叙述尽可能多的情况。
然而,要在本说明书中全都注明不能这样做或者那样做,则需要占用说明书的大量篇幅,所以本说明书中没有一一列举。
因此,对于那些在说明书中没有叙述的情况,可以视为“不可能”的情况。
B-85168CM-1/01前言前言本说明书就FANUC ROBODRILL α-T14i Fe/21i Fe series在进行特定的维修作业时的步骤进行说明。
(有关构成适用对象的机床规格,请参阅上一页内容。
)本说明书中所列的维修作业,在维持本设备的性能方面极为重要,其前提是,这类维修作业应由事先接受过培训的作业人员进行。
经验不够丰富,技术不够熟练的作业人员,仅仅依靠本说明书进行作业,恐会损坏机床的性能,切勿行之。
B-85168CM-1/01目录目录前言 ................................................................................................................................................p-1 1 转塔调节设定 (α-T14i Fe series) (1)1.1 准备 (2)1.2 调节主轴电机的栅格位移 (2)1.3 调节换刀区域检测开关 (3)1.4 调节曲柄X轴方向位置 (3)1.5 调节松开机构 (4)1.6 调节刀具脱离点 (5)1.7 选择制动器的厚度 (6)1.8 调整转塔基座升降方向位置 (6)1.9 确认制动器的厚度 (7)1.10 消除转塔基座的反向间隙 (7)1.11 安装夹钳 (8)1.12 转塔分度时Z坐标的微调 (8)1.13 制动器安装位置的微调 (9)1.14 转塔部反向间隙的微调 (9)1.15 确认调节螺丝部的固定情况 (10)1.16 设定 (10)1.17 换刀循环 (参考) (11)1.18 换刀循环细分割区间(L1~L2、L4~L1)(参考) (12)1.19 相关参数(参考) (13)1.20 确认 (18)1.21 运行试验 (18)2转塔调节设定 (α-T21i Fe series) (19)2.1 准备 (20)2.2 调节主轴电机的栅格位移 (20)2.3 调节换刀区域检测开关 (21)2.4 调节曲柄X轴方向位置 (21)2.5 调节松开机构 (22)2.6 调节刀具脱离点 (23)2.7 选择制动器的厚度 (24)2.8 调整转塔基座升降方向位置 (24)2.9 确认制动器的厚度 (25)2.10 消除转塔基座的反向间隙 (25)2.11 安装夹钳 (26)2.12 转塔分度时Z坐标的微调 (26)2.13 制动器安装位置的微调 (27)2.14 转塔部反向间隙的微调 (27)2.15 确认调节螺丝部的固定情况 (28)2.16 设定 (28)2.17 换刀循环 (参考) (29)2.18 换刀循环细分割区间(L1~L2、L4~L1)(参考) (30)2.19 相关参数(参考) (31)2.20 确认 (36)2.21 运行试验 (36)目录B-85168CM-1/01 3主轴更换步骤 (37)3.1 主轴单元的拆除 (38)3.2 拆除拉杆(仅限更换轴杆单元) (41)3.3 安装主轴单元 (43)3.4 安装臂单元 (44)3.5 连接主轴电机轴杆和主轴杆 (45)3.6 运转主轴 (47)3.7 平衡校正 (49)3.8 测量主轴的负载表值 (51)3.9 转塔调节 (51)4主轴电机更换步骤书 (52)4.1 拆除主轴电机 (53)4.2 安装主轴电机 (55)4.3 转塔调节 (60)5刀具夹紧力测量步骤 (61)5.1 测量装置 (61)5.2 测量方法 (61)5.3 测量值 (61)6主轴栅格位移调节步骤 (62)6.1 测量步骤 (62)7刀具夹紧接近开关更换步骤书 (63)7.1 更换步骤 (63)8主轴调节用服务方式 (64)9 滚珠丝杠更换步骤 (66)9.1 X轴 (67)9.2 Y轴 (72)9.3 Z轴 (77)10导轨更换步骤 (81)10.1 X轴 (82)10.2 Y轴 (86)10.3 Z轴 (89)11电机原点恢复 (93)12 NC数据备份步骤 (94)12.1 将SRAM的内容统一保存/恢复到存储卡 (95)12.2 将FROM的内容保存/恢复到存储卡 (96)1.转塔调节设定(α-T14i Fe series) B-85168CM-1/011 转塔调节设定(α-T14i Fe series)FANUC ROBODRILL α-T14i Fe series转塔调节设定规格书(筒型)本规格书就FANUC ROBODRILL α-T14i Fe的转塔部调节设定进行描述。
(3)识别错误以及症状的类别,要先于故障诊断。
(4)每⼀类错误在机器⼈操作中都同等严重。
(5)错误类型分为:
a、第⼀类错误
b、第⼆类错误
c、第三类错误
d、第四类错误
2、第⼀类错误慨述
(1)症状
a 、控制器死机
b 、⽰教盒屏幕空⽩
(2)潜在的原因
a、控制器 AC 电源存在问题
b、断开器的问题
c、变压器的问题
d、控制器 DC 电源线路的问题
e、电缆线问题
g、⽰教盒/缆线问题
f、电源供给单元损坏
h、电源供给单元保险丝熔断
i、开/关电路的问题
j、⾯板电路板保险丝
3、第⼆类错误概述
(1)症状
a⽰教盒锁死,没反应
(2)潜在的原因
a 、软件故障
b 、主板的问题
---u CPU 模块,连同DRAM
---u FROM/SRAM 模块
c 、⽰教盒/缆线/ISB 单元的问题
d、 PSU 或者底板(激活信号)的问题
e、辅助轴控制卡的问题
4、第三类错误概述
(1)症状。
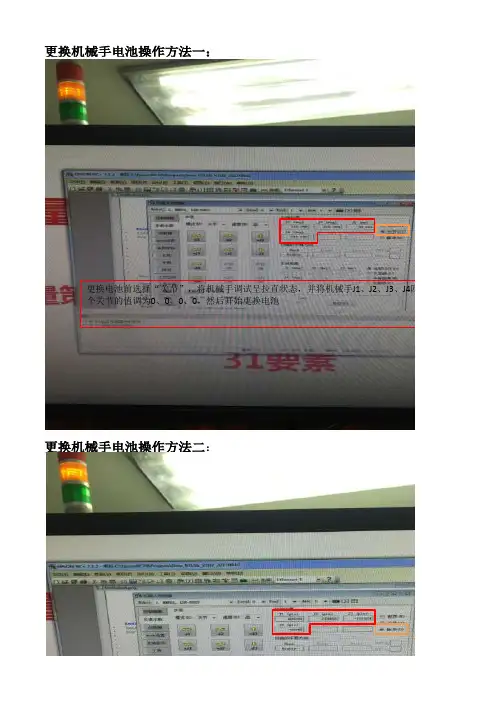
更换机械手电池操作方法一:
更换电池前选择“关节”,将机械手调试呈拉直状态,并将机械手J1、J2、J3、J4四
个关节的值调为0、0、0、0,然后开始更换电池
更换机械手电池操作方法二:
更换电池前选择“脉冲”,将机械手当前J1,J2,J3,J4四个关节的脉冲值记录下来,
J4四
1
2
3
1.更换电池后在命令界面输入>encreset1,2,3,4 按回车重置编码器
2.在命令界面输入>calpls 0,0,0,0 按回车机械手自动会把当前位置的脉冲将脉冲释放为零)
3.在命令界面输入>calib 1,2,3,4 按回车机械手会自动校正1,2,3,4轴关节原更换电池步骤完成
2
1
3
1.更换电池后在命令界面输入>encreset1,2,3,4 按回车重置编码器
2.在命令界面输入>calpls X,X,X,X (将X值改为换电池前记录下来的四个轴的脉冲
按回车机械手自动会把更换电池前的脉冲值设置到控制器(即为机械手当前的
3.在命令界面输入>calib 1,2,3,4 按回车机械手会自动校正1,2,3,4轴关节原点下来,开始
更换电池步骤完成
的脉冲设为0(即关节原点,届时
的脉冲值) 当前的脉冲)节原点,届时。
发那科机器人20个基础知识点(二)1、FANUC机器人三种备份与加载的方法——一般模式下的备份与加载、镜像备份与恢复、自动备份。
2、FANUC机器人主板上的电池大约每两年更换一次。
3、零点标定的方法有5种——专用夹具零点位置标定(一般在机器人出厂之前使用)、全轴零点位置标定、简易零点标定、单轴零点标定、直接输入零点标定数据。
4、只有在系统参数(系统变量)$MASTER_ENB为1或2时,才会显示零点标定/校准界面。
5、FANUC机器人的三种动作类型——关节(J)、直线(L)和圆弧(C)。
6、寄存器指令是用于寄存器算术运算的指令。
寄存器包括数值寄存器、位置寄存器和码垛寄存器。
7、位置寄存器主要用于存储位置数据的变量,标准配套100个位置寄存器。
8、FANUC机器人的程序命名——不能以空格、符号、数字作为程序名称的开头,否则不能创建程序。
9、发那科机器人示教器的启动方式分为两种——手动启动方式和自动启动方式。
10、手动启动方式分为三种:顺序连续运行、顺序单步运行、逆序单步运行。
11、远程控制是通过外围设备与I/O通信的方式启动控制程序。
可进行远程控制的程序分为RSR程序、PNS程序,以及宏程序。
12、程序的状态包括如下三种——●执行状态:此时,系统将程序的执行状态显示为RUNNING (执行)●强制终止状态:此时,系统将显示程序的执行状态为ABORTED(结束)●暂停状态:此时,系统将显示程序的执行状态为PAUSED (暂停)13、中断程序的方法有如下两种——暂停程序(PAUSED)和终止程序(ABORTED)14、FANUC机器人的两种位置数据类型——一般位置P[]和位置寄存器PR[]。
15、FANUC机器人的速度——VFINE→FINE→1%→5%→50%→100% (VFINE→5%之间,每按一下,增加1%;5%→100%之间,每按一下,增加5%)16、FANUC机器人TP示教盒上的deadman开关共有3个档位。
工业机器人题库(含答案)一、单选题(共76题,每题1分,共76分)1.(工业机器人IO模块电源通常为( )。
A、36VB、12VC、24VD、48V正确答案:C2.(《安全生产法》规定,生产经营单位必须为从业人员提供符合国家标准或者行业标准的(),并监督、教育从业人员照章执行。
A、劳动防护用品B、劳动工具C、住宿饮食D、福利待遇正确答案:A3.(ABB机器人的重复执行指令是( )。
A、IFB、FORC、WaitDID、AccSet正确答案:B4.(关于ABB 机器人故障代码5XXXX的描述准确的是( )。
A、与系统功能、系统状态相关的信息B、与控制工业机器人的移动和定位有关的信息C、与系统硬件、工业机器人本体以及控制器硬件有关的信息D、与输入和输出、数据总线等有关的信息正确答案:B5.(当机器人系统()时,可利用备份的系统文件进行恢复。
A、报警B、重启C、死机D、重新安装系统正确答案:D6.(,示教-再现控制为一种在线编程方式,它的最大问题是( )。
A、操作人员劳动强度大B、操作人员安全问题C、容易产生废品D、占用生产时间正确答案:D7.(线性运动指令的特点是()。
A、确保从起点到终点之间的路径始终保持为圆弧B、用于将机械臂和外轴移动至轴位置中指定的绝对位置C、对路径精度要求不高D、确保从起点到终点之间的路径始终保持为直线正确答案:D8.(ABB工业机器人系统恢复完成后,需要( )才能生效。
A、不需要重新启动控制器B、重新启动控制器C、重新设置参数D、重装系统正确答案:B9.(机器人处于再启动动作中,再次暂停后手动运行了机器人。
重新启动运行时,再启动动作将是直接向着( )的动作。
A、机器人原点B、下一个示教点C、最初的开始位置D、最初的停止位置正确答案:D10.(WHILE指令,可以实现的功能是()。
A、调用程序B、重复执行C、赋值D、通讯正确答案:B11.(FANUC机器人发生SRVO-075报警时,机器人可以( )动作。
工业机器人题库含参考答案一、单选题(共76题,每题1分,共76分)1.(工业机器人控制系统的调度指挥机构是()。
A、计算机控制器B、操作面板C、示教器D、轴控制器正确答案:A2.(机器人作业路径通常用( )坐标系相对于工件坐标系的运动来描述。
A、运动B、手爪C、固定D、工具正确答案:D3.(要做到办事公道,在处理公私关系时,要( )。
A、公平公正B、先公后私C、公私不分D、假公济私正确答案:A4.(人机界面正常但是无法操作设备,可能是因为()。
A、声波屏的发射条件受到轻微的破坏表面声波式触摸屏、B、人机界面的驱动程序版本过低C、串口及中断信号有冲突D、声波人机界面在使用一段时间之后,屏幕四周的发射条纹上面被灰尘覆盖正确答案:B5.(ABB机器人控制器有四个独立的安全保护机制,其中常规模式保护安全机制GS在()时有效。
A、紧急停止模式B、任何操作模式C、手动操作模式D、自动操作模式正确答案:B6.(工业机器人更换本体编码器电池时,需要在()情况下进行。
A、运行B、开机C、暂停D、关机正确答案:B7.(下列关于机器人关节维护不正确的是()。
A、检查六轴机器人各轴零位是否准确B、拆装过程做好标记及存储工作C、检查软管束及线缆有无破损及断裂D、机器人拆装工具可以使用活动扳手正确答案:D8.(PLC能与上位机以及其他智能设备之间交换信息,形成一个统一的整体,是电气系统重要组成部分,那么PLC与电气回路的接口是通过____模块完成的。
A、I/OB、基座C、开关电源D、CPU正确答案:A9.(手爪的主要功能是抓住工件、握持工件和( )工件。
A、触摸B、固定C、定位D、释放正确答案:D10.(当工业机器人手臂与外部设备发生碰撞时,如果不易挪动外部设备且也不能通过操纵工业机器人解决问题,可通过操作下列( )按钮来排除当前运行故障情况。
A、程序停止按钮B、急停按钮C、电机上电按钮D、制动闸释放按钮正确答案:D11.(隔离开关的文字符号是 ( )。