水稻钵育秧盘起盘机的设计和试验研究
- 格式:doc
- 大小:25.00 KB
- 文档页数:4
水稻钵育秧盘起盘机的设计和试验研究/h11.1 研究的目的和意义水稻是我国最主要的粮食作物之一,总产量约占我国粮食总产量的百分之四十。
相比较而言,水稻是比玉米和小麦更加具有经济效益的粮食作物;水稻的种植技术以及生长环境相对复杂,生产过程涉及环节流程多,种植的季节性强,并且水稻全程生产过程中所需的用工量多、劳动强度大。
中国是世界上最大的水稻生产和消费国,水稻生产不仅负担着确保国家粮食安全的重任,也肩负着实现种粮增效、稻农增收和推进新农村建设的重要使命,同时也是现阶段中国农业和农村经济发展的重心任务之一。
黑龙江省位于我国的东北部,是中国位置最北、纬度最高的省份。
黑龙江属中温带到寒温带的大陆性季风气候,年平均气温在-4~5℃。
黑龙江土地肥沃,有机质含量高,是世界三大黑土地带之一,是名副其实的国家粮食主产区。
2013 年黑龙江省粮食种植面积为20 913.1 万亩,总产量跃上 1 200 亿斤新台阶,比上年增加48.5 亿斤,增长 4.2%,再获特大丰收。
黑龙江适合种植水稻、玉米、大豆、小麦四种粮食作物。
尤其是黑龙江的粳稻全国闻名,品质优良,口感好,备受人们青睐,需求呈扩大的趋势。
近些年来,随着城市化脚步的加快以及农村耕地面积的逐渐减小,加之农村的主要青壮劳动力流向城市务工以及农用物资、生产原料的成本上涨等原因,以往的水稻育秧生产模式已经落后。
随着国家对“三农问题”的关注以及对农业扶持力度的逐年加大,我国水稻生产模式将发生变革。
因此,推广使用简单,省力,省人工的技术模式,对水稻全程机械化生产模式的推广建设起着重要作用。
1.2 国内外相关机械的研究在农业生产的各项环节中,使用机械作业代替人力作业,实现全程机械化作业,已经成为全世界各国的研究趋势,但由于现阶段农艺与农机的相互配合的程度以及机械设备的发展水平相对较低,使得全程机械化作业的发展受到制约。
同时由于国内外农业机械化水平存在着差异,特别是国内的水稻种植培育模式正处于更新换代的阶段,相应的配套机械还未完全适应新的生产模式。
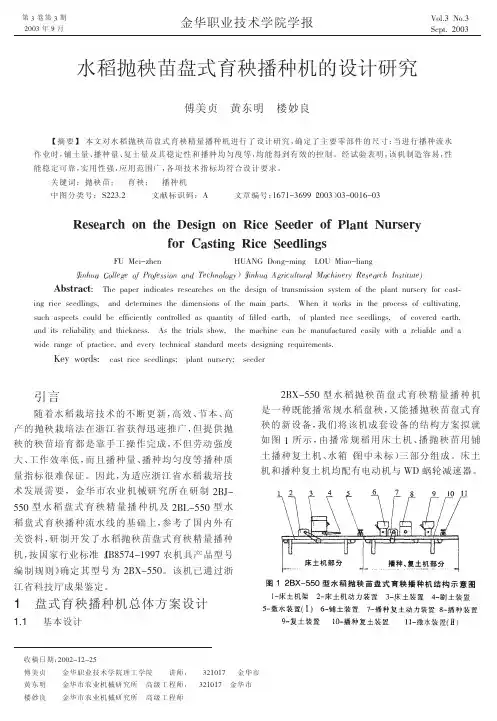
Vol.41 No.11Nov. 2020第41卷第11期2020年11月中国农机化学报Journal of Chinese Agricultural MechanizationDOI : 10.13733/j.jcam.issn.2095-5553.2020.11.003水稻钵苗有序抛秧机精准送秧装置设计与试验!纪要】,纪鸿波2,张文毅】,顾义兵3,李坤】,刘宏俊1(1.农业农村部南京农业机械化研究所,南京市$10014; 2.江苏省农业机械试验鉴定站,南京市$10017;3.常州远播机械有限公司,江苏常州,225000)摘要:为满足水稻钵苗有序抛秧对送秧装置提出的精准、稳定、可靠的送秧要求,设计一种新型的送秧装置。
该装置基于 可降解钵苗盘整排送秧,在取苗过程中秧盘无需横向移动,采用鼠笼式平送机构、凸轮摇杆机构、四杆机构以及单向离合器机构相组合,提高了纵向送秧的精度和稳定性。
针对可降解钵苗盘对纵向送秧提出的要求,完成关键部件的设计;对纵向送秧装置工作原理进行分析,建立纵向送秧机构运动学模型,并进行虚拟仿真分析,验证设计的可行性;试制加工纵向送秧装置,并进行试验验证。
试验结果表明:设计的纵向送秧装置单次送秧出现一定的误差,但误差在2 mm 以内,且未出现累计误差和漏送的问题。
关键词:抛秧机;钵体苗;送秧装置;水稻中图分类号:S22391 + 2 文献标识码:A 文章编号:2095-5553 (2020) 11-0012-06纪要,纪鸿波,张文毅,顾义兵,李坤$刘宏俊.水稻钵苗有序抛秧机精准送秧装置设计与试验中国农机化学报$2020, 41(11): 12 — 17Ji Yao, Ji Hongbo, Zhang Wenyi, Gu Yibing, Li Kun, Liu Hongjun. Design and experiment of precise feeding-seedlingdevice of potted seedling orderly throwing transplanter for rice Journal of Chinese Agricultural Mechanization, 2020,41(11): 12—170引言水稻机械移栽具有省时省工、高产高效,对区域、品种、气候条件等要求不高,适应性广等优点’其中钵 苗移栽相比于毯苗机插具有:秧苗素质高、秧龄弹性 大、利于缓解茬口矛盾,移栽基本无植伤、活棵发苗快、利于促进分葉成穗,中期库大源足、后期衰减慢、利于 形成壮秆大穗,群体结构优化、利于发挥品种潜力、实 现稳产高产17'现有钵苗移栽技术主要采用塑料软盘育秧,机械移栽存在以下问题收、清洗、储存困难,大 多散落田间或堆放地头,不能自然降解,长期大量使用对稻田环境存在较大的污染隐患[W11]'在此背景下, 本课题组基于可降解钵苗盘研发了新型水稻钵苗有序抛秧机。
水稻钵体育苗机械摆栽技术示范总结一、水稻钵体育苗机械摆插技术应用背景尚志市水稻栽培具有悠久的历史,目前种植面积达63万亩之多,栽培品种以中早熟品种为主,在育苗方式上以普通塑料机插软盘育苗为主,但由于播量大,中小苗比例大,秧苗素质较差,收获穗数明显不足,致使水稻产量低、品质差、效益低,常年水稻平均亩产不足500公斤。
为从根本上解决上述问题,全面提升水稻生产水平,加快水稻综合高产栽培技术的推广,提高水稻单产、增加总产、改善品质、提高效益、促进农民增收,20________年对水稻钵体育苗机械摆插综合高产栽培技术进行示范。
现将该项技术示范情况总结如下:二、示范基本情况(一)实施地点、面积项目实施地点在尚志市河东乡南兴村,总面积20________0亩,实施主体为长道水稻种植专业合作社。
(二)实施情况种植品种为五优稻4号,采用智能化浸种催芽技术,3月28日进行浸种,4月4日催芽,4月6日播种,播量为每盘110克芽种。
移栽期为5月13日,秧龄为25天,摆插规格为9×6,亩施水稻专用肥30公斤作底肥在耙地前施入,插秧后亩施返青肥2.5公斤,返青后亩施尿素7公斤作分蘖肥,穗肥为尿素3公斤加50%硫酸钾肥5公斤。
全生育期灌溉采取浅、湿、干节水灌溉技术,插秧时田内为花达水,返青后进入分蘖期水层为3—5厘米,6月23日进行烤田,7月初灌水,水层4-5厘米,7月20日灌15—20厘米护胎水,抽穗后采用干湿交替的湿润灌溉法进行灌溉,促进根系下扎,黄熟期停水。
化学除草选用安全性高的除草剂进行化学除草,亩用 12%恶草酮20________-250毫升进行封闭除草。
稻瘟病防治稻以预防为主,在7月中旬人工喷药,结合防治二化螟进行预防, 8月初采用飞机航喷,先后两次喷药预防,药剂以45%咪酰胺药剂为主,没有发生病虫草害。
成熟期为9月15日,收割期为10月10日。
(三)实施效果1.经济效益:该示范区水稻产量为646.45公斤,比普通机插535.24公斤亩增产111.21公斤,新增总产22.24万公斤,折合人民币为66.72万元,经济效益十分显着。
水稻全程机械化生产技术探讨论文水稻全程机械化生产技术探讨论文1机械全程化技术分析所谓机械全程化,顾名思义,就是使用机械完成水稻的生产,加工,包装。
而详细地说,水稻生产全程机械化技术是水稻生产全过程中机械化技术的应用和组织实施,它主要包括一些农业技术和农艺要求,比如生产技术、管理技术、机械技术、生物技术、农机作业,以及耕地、育秧、栽植、植保、收获、干燥等农业生产主要环节的一些机械化操作。
1.1水稻棚盘育秧技术:盘土配置、播种、盘土规格。
1.2水田机械化整田技术:基础整地、播秧前整地。
1.3泡田技术。
1.4水稻机械插秧技术。
1.5水稻机械收获技术。
1.6粮食处理机械化技术。
在近几年宝应县也大力推进农业机械化,买进了一批先进的农业机具、并且引进新技术应用于农业生产。
在宝应县地区水稻是最主要的大众粮食作物,在生产过程中的整地、植保、排灌、收获、加工等生产环节完成机械化作业有极大的困难,所以水稻机械化种植方面是水稻生产机械化的难点。
2宝应县对水稻全程机械化技术的各种应用成效2.1我县是全省重要的粮食生产基地之一,其粮食作物以水稻和小麦为主,为一年两熟制。
该省稻麦机械化生产水平位居全国前列,然而对稻麦机械化生产模式的选择以及其生产效率问题是不明确的。
以组织模式和技术模式的耦合,构建了稻麦机械化生产模式的概念模型,归纳得出江苏省当前有24种典型的.稻麦机械化生产模式。
并分析了该省稻麦机械化生产模式的形成机制与发展历程,并与日韩发达国家相关机械化生产模式相比,得出其还有进一步发展优化空间。
2.2我县在用机械化创造农业先进生产力的同时,也为农业机械化事业的发展并且,提供了大量的理论参考和实践经验,对周边地区的村民发挥了极大的示范带动作用。
农业机械的大规模使用和先进装备的引进,还为宝应县的农业机械制造业发展提供了极大的动力。
农业机械化事业在生产实践中和农业现代化建设等方面发挥着不可替代的示范作用,极大的提高了宝应县的农业生产力。
水稻植质钵盘摆盘机设计与试验摘要为实现水稻植质钵盘机械化摆盘需要,设计一款水稻植质钵盘摆盘机,阐述其整机结构及工作原理,并进行田间生产性试验。
试验结果表明:机械化摆盘,水稻植质钵盘精量播种均匀度达98.2%,工作效率达245盘/h,完全能够满足后续作业要求。
关键词水稻植质钵盘摆盘设计试验0 引言水稻植质钵育机械化栽培技术的增产效果已在多年田间实践中得到验证\[1-2\]。
水稻植质钵育机械化栽培技术是以水稻植质钵盘为核心,集成精量播种技术和有序移栽技术而成的一项具有中国特色的新型钵育栽培技术。
利用水稻植质钵育机械化栽培技术从事水稻生产,第一道工序是在育秧大棚内进行摆盘作业。
与其他水稻栽培技术一样,早期摆盘作业需要人工来完成,存在作业时间长和人工投入大等问题\[3\]。
通过查阅文献,国内外对摆盘作业装置的研究鲜见报道。
基于以上问题,设计出一款适合于水稻植质钵盘的摆盘装置,其能够满足水稻植质钵盘精量播种要求。
1 总体结构与工作原理1.1 总体结构水稻植质钵盘摆盘机整体结构如下图所示,其主要由秧盘箱、机架、托架、支撑杆、导向斜板、斜板支架、行走轮、秧盘夹、手动杠杆和连接杆等组成。
技术参数如表1所示。
1秧盘箱2机架3托架4支撑杆5导向斜板6斜板支架7行走轮8秧盘夹9手动杠杆10连接杆图摆盘机1.2 工作原理把秧盘依次放入秧盘盛放箱1中,将机械置于开始工作位置,向操作者身体方向拉动手动杠杆9并握紧位于手动杠杆上的秧盘夹控制手闸,拉动过程中杠杆推动最底下的秧盘到摆放位置,同时倒数第2个秧盘被秧盘夹8夹紧并拉起。
摆放好后,手动杠杆回推,此时往复支撑托架3随手动杠杆回落,当手动杠杆回到初始位置时,松开秧盘夹控制手闸,则第2个秧盘落下,此时重复开始动作,从而实现持续不断的摆盘作业。
表1 摆盘机主要技术参数项目数值外形尺寸(长×宽×高)/mm345×421×532动力来源手动工作效率/(盘·h-1)2402 生产性试验2.1 试验时间与地点试验于2013年5月23-26日在黑龙江八一农垦大学水稻植质钵育机械化栽培技术研究中心进行。
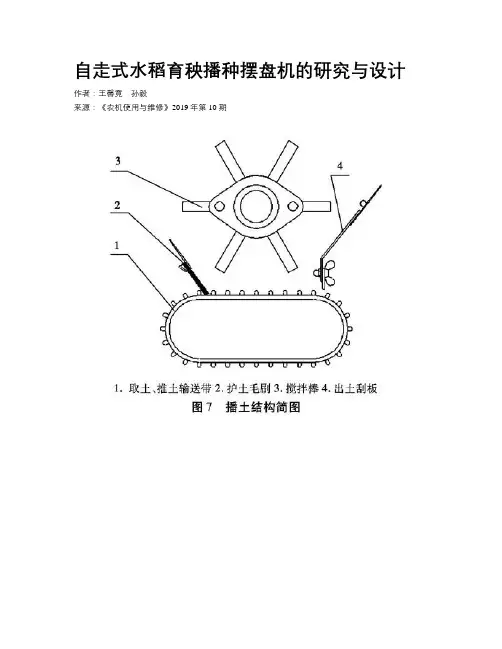
自走式水稻育秧播种摆盘机的研究与设计作者:王馨竟孙毅来源:《农机使用与维修》2019年第10期摘要:针对现有的水稻大棚育秧播种机的现状和存在的问题,研发一种新型的自走式水稻育秧播种摆盘机。
该机可将传统的苗盘播种集成于一台履带行走的机器上,在播底土、播种、覆土过程中将秧盘有序地摆放于水稻育秧大棚的苗床上,从而大幅度提高水稻育秧机械化水平。
关键词:育秧播种摆盘机;研究与设计;应用与前景中图分类号:S223.2 文献标识码:Adoi:10.14031/ki.njwx.2019.10.0071 目的和意义水稻是我国主要粮食作物,水稻的播种面积和总产量均居粮食作物的首位。
目前,黑龙江省水稻种植面积近6500万亩, 95%的水稻种植采用旱育插秧技术。
现有的水稻育秧苗盘播种技术有两种:一是用人工将秧盘摆放于水稻育秧大棚中,然后用秧盘播种机播种;二是用人工将秧盘通过输送带喂入秧盘覆土、播种、覆土一体机,然后用人工将播种好的秧盘摆放于水稻育秧大棚中,二者都需要较多人工,增加了育秧环节的作业成本。
采用自走式水稻育秧播种摆盘机可以有效地解决这一问题。
它是将传统的苗盘播种集成于一台履带行走的机器上,在播底土、播种、覆土过程中将秧盘有序地摆放于水稻育秧大棚的苗床上,从而大幅提高水稻育秧机械化水平,减轻劳动强度和节省人工,提高作业效率和作业质量,降低水稻育秧综合生产成本。
与传统的摆盘、播种作业方式相比节省人工3人,作业成本降低20%以上,即每公顷育秧成本减少1500元。
2 结构与原理2.1 主要结构本机分为汽油机和电动机两种机型。
主要由汽油机或电机、变速箱、覆土机构、播种机构、机架、传动系统、地轮行走机构等组成(如图1所示)。
1.秧盘下滑板2.秧盘输送装置3.抬手4.上覆土机构5.下搅土杆6.上覆土箱7.播种装置8.播种箱9.下覆土机构10.上搅土杆11.下覆土箱12.护盘钢丝13.侧护盘钢丝14.秧盘上滑板15.秧盘侧滑板16.扶手架17.行走装置18.离合拨叉19.涡轮蜗杆变速箱2.2 工作原理本机采用发动机(电机)传动→减速机传动→动力输出轮。
Z S T U Zhejiang Sci-Tech University硕士学位论文Master’s Thesis中文论文题目: 基于夹钵式水稻钵苗移栽机构的优化设计与试验英文论文题目:Optimization Design and Test of TransplantingMechanism Based on Clipping Rice Plug-Seedling 学科专业:机械工程作者姓名:张永松指导老师:俞高红教授完成日期:2017年12月20日摘要移栽机构是水稻钵苗高速移栽作业的核心工作部件,直接影响钵苗移栽的效率及移栽的质量。
在分析了现阶段关于水稻钵苗移栽机构的研究,发现基于夹苗式的移栽机构(通过两个秧片夹取钵苗的茎秆进行移栽)应用最为广泛。
但通过大量的田间移栽试验,该类取苗方式的移栽机构还存在两个问题:若取秧爪上粘有泥土,取苗时会出现打滑导致取苗失败的问题;推秧杆推秧不充分影响钵苗直立度的问题。
针对以上问题,本文提出了一种具有新型取苗方式的移栽机构——基于夹钵式的水稻钵苗移栽机构(通过秧针插入钵穴夹取苗根部的钵土进行移栽)。
该机构能有效解决现有夹苗式水稻钵苗移栽机构存在的问题,有效地提高了水稻钵苗的移栽效率。
本文完成了该新型移栽机构的设计,并展开了一系列的相关试验研究。
本文主要研究内容如下:1)在总结和分析了现阶段关于水稻钵苗移栽机构研究的基础上,确定了基于夹钵式的移栽机构方案,研究该机构的运动特性,完成机构的运动学建模。
2)找出移栽轨迹与移栽机构关键参数之间的对应关系,运用VB软件对移栽机构的参数进行优化,最终得到一条比较理想的移栽轨迹。
3)根据优化后的机构参数,进行移栽机构整体的结构设计,分为行星轮系与移栽臂两部分,并完成移栽爪、移栽臂凸轮轮廓、消除非圆齿轮齿隙装置及缓冲装置的设计。
4)利用SolidWorks2012完成移栽机构模型的建立,利用Adams软件进行移栽机构的虚拟运动模拟试验,对比理论设计,结果呈现一致性,验证了机构优化设计的结果是正确的。
第24卷第4期农业工程学报V ol.24No.4 2008年4月Transactions of the CSAE Apr.2008301水稻秧盘育秧播种技术与装备的研究现状及发展趋势周海波1,3,马旭2※,姚亚利4(1.吉林大学生物与农业工程学院,长春130025;2.华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州510642;3.佳木斯大学机械工程学院,佳木斯154007;4.大庆油田龙丰实业公司,大庆163511)摘要:该文在收集、整理并研究国内外关于水稻秧盘育秧播种技术与装备的基础上,按照播种流水线的结构特点和工作原理进行分析归纳,系统地总结了每一类机型的研究现状,详细分析了播种、排土和秧盘同步传动等技术难点,以及主要部件采用的工作原理、技术参数和所能达到的性能指标,通过对现有机型特点的分析比较,给出了各类机型的适用范围。
最后,根据水稻插、抛秧种植的农艺要求,尤其是中国超级杂交稻种植技术的要求,提出适合于超级杂交稻精密播种的新型育秧系统,上述研究为适用于中国传统水稻育秧,以及发展中的超级杂交稻低成本高速精准秧盘育秧播种技术研究提供参考。
关键词:水稻育秧播种;精密播种;秧盘育秧;超级杂交稻中图分类号:S233.71文献标识码:A文章编号:1002-6819(2008)-4-0301-06周海波,马旭,姚亚利.水稻秧盘育秧播种技术与装备的研究现状及发展趋势[J].农业工程学报,2008,24(4):301-306.Zhou Haibo,Ma Xu,Yao Yali.Research advances and prospects in the seeding technology and equipment for tray nursing seedlings of rice[J].Transactions of the CSAE,2008,24(4):301-306.(in Chinese with English abstract)0引 言目前水稻种植技术主要有两种模式,即水稻直播和育秧移栽技术,美国、澳大利亚、意大利及其他欧美国家主要采用直播种植,而亚洲地区则以能实现高产的育秧移栽种植为主[1]。
水稻秧盘育秧播种技术与装备的研究现状及发展趋势作者:李宁孙振雨苗力来源:《农机使用与维修》2015年第07期摘要水稻秧盘播种技术是有效保证水稻机械化的主要设备,能够大大提高水稻的种植效率。
本文主要分析了当前国内外的水稻秧盘育秧技术的基础之上,来对整个育秧生产线的流程进行了总结归纳,并且对各种现代育秧设备的优缺点进行了归纳总结,最后提出为了提高我国水稻的种植效率,提出了现代化的秧盘育苗技术。
关键词水稻秧盘育秧播种技术装备趋势1 国内水稻秧盘育秧播种技术与装备的现状水稻秧盘育秧技术主要由供/接送秧盘、铺/覆盖土、压实、播种以及洒水这几部分组成。
以前的播种技术所要求的主要就是播种,但是如今的播种技术不仅涉及到了精量地进行取种以外,还需要能够保证正确的投种,此外,在流水线中保证排土均匀也是很关键的技术。
1.1 水稻秧盘育秧的播种装置根据播种的不同工作原理,可以将播种装置主要分为机械式、振动式以及气力式三种。
(1)机械式播种装置。
机械式的播种装置主要由槽轮式、窝眼轮或者型孔式为主要的工作部件。
这种播种机结构简单,造价较低,并且具有很高的效率等。
但是在播种的过程中,为了保证播种的质量,因此种槽的尺寸就比较大,使得每穴中的种子数较多,不能够有效控制播种量的稳定,有时候还会发生伤苗的现象。
机械式的播种主要适用于种植面积较大的播种过程。
(2)振动式播种装置。
该种播种装置的优点主要就是结构简单、槽轮能够实现定量播种,并且播种的时候能够保证不伤种。
通过实践证明,在该种播种装置中影响播种速度的因素不仅有水稻的形状和大小,而且与机械本身的振幅、频率、排种盘宽度以及振动倾角等存在着关联,这些因素都会对排种盘中种子是否能够流畅进行播种造成影响。
人们为了保证播种的精良度,目前已经研发出了光电与电磁振动相结合的播种机械,能够大大提高播种的精确度,并且能够保证不伤种,但是,也带来了生产率较低的问题。
(3)气力式播种装置。
气力式播种装置又可以分为三种:吸针式、吸盘式以及滚筒式。
水稻钵育秧盘起盘机的设计和试验研究
/h1
1.1 研究的目的和意义
水稻是我国最主要的粮食作物之一,总产量约占我国粮食总产量的百分之四十。
相比较而言,水稻是比玉米和小麦更加具有经济效益的粮食作物;水稻的种植技术以及生长环境相对复杂,生产过程涉及环节流程多,种植的季节性强,并且水稻全程生产过程中所需的用工量多、劳动强度大。
中国是世界上最大的水稻生产和消费国,水稻生产不仅负担着确保国家粮食安全的重任,也肩负着实现种粮增效、稻农增收和推进新农村建设的重要使命,同时也是现阶段中国农业和农村经济发展的重心任务之一。
黑龙江省位于我国的东北部,是中国位置最北、纬度最高的省份。
黑龙江属中温带到寒温带的大陆性季风气候,年平均气温在-4~5℃。
黑龙江土地肥沃,有机质含量高,是世界三大黑土地带之一,是名副其实的国家粮食主产区。
2013 年黑龙江省粮食种植面积为20 913.1 万亩,总产量跃上 1 200 亿斤新台阶,比上年增加48.5 亿斤,增长 4.2%,再获特大丰收。
黑龙江适合种植水稻、玉米、大豆、小麦四种粮食作物。
尤其是黑龙江的粳稻全国闻名,品质优良,口感好,备受人们青睐,需求呈扩大的趋势。
近些年来,随着城市化脚步的加快以及农村耕地面积的逐渐减小,加之农村的主要青壮劳动力流向城市务工以及农用物资、生产原料的成本上涨等原因,以往的水稻育秧生产模式已经落后。
随着国家对“三农问题”的关注以及对农业扶持力度的逐年加大,我国水稻生产模式将发生变革。
因此,推广使用简单,省力,省人工的技术模式,对水稻全程机械化生产模式的推广建设起着重要作用。
1.2 国内外相关机械的研究
在农业生产的各项环节中,使用机械作业代替人力作业,实现全程机械化作业,已经成为全世界各国的研究趋势,但由于现阶段农艺与农机的相互配合的程度以及机械设备的发展水平相对较低,使得全程机械化作业的发展受到制约。
同时由于国内外农业机械化水平存在着差异,特别是国内的水稻种植培育模式正处于更新换代的阶段,相应的配套机械还未完全适应新的生产模式。
上个世纪四十年代,美国和欧洲的一些国家率先将大田作业的配套农机具,经过一系列的改装后,用于果树苗木的生产中。
自六十年代以来,园林机械发展迅猛,各项生产工序由原来的人力操作逐渐被机械化操作替代,同时为了满足农机与农艺的相互配合,园林机械也做出了相应比较大的改革。
从生产规模上分析,国外的苗圃一般占地面积较大;从配套机械的使用上分析,国外的机械化程度较高。
在我国,农业机械的起步较晚、起点较低、发展较慢,并且以往的生产管理模式较为落后,目前依旧普遍采用农户分散培育,各自独立管理的种植模式,从而无法完成机械化生产。
现阶段我国的园林机械在一定程度上借鉴了国外大型园林机械的工作方式,并针对我国农业的实际生产、种植与管理模式进行了相应的研发,从而研制出符合我国各项农业生产的配套机械。
为了实现水稻生产的机械化,通过借鉴以往在农田大型机械的研究方法,针对水稻秧苗生长的农艺要求以及进行起盘的工作要求,对相应工作部件以及工作方式进行分析、研究,研制出适合我国现阶段水稻钵育秧盘的起盘机。
第二章起盘机整机的设计分析
2.1 起盘机的设计要求
(1)起盘的规格要求插秧工作中插秧机要求使用的是以营养土为载体的标准化秧盘,简称秧块。
秧块的标准长为490mm,宽度范围应在275~280mm 之间,高为22mm,四角垂直方正,不缺边缺角。
要求秧块上的成品苗需要 1.5~3 株/穴,秧苗在整个秧块上要分布均匀,秧苗挺拔整齐,秧苗根在秧块中形成根部盘结,提起时不易松散,可将秧块整体放入秧箱,最后进行插秧工作时,不会造成卡死、脱空以及漏插。
(2)起盘机的作业要求在满足插秧机插秧标准的前提下,为了防止造成插秧不均造成的漏插或每穴株数差距过大,起盘机对秧盘的损伤率不大于5%。
2.2 起盘机的设计原则
/h1
结合现阶段水稻大棚植质钵育秧盘的培育以及管理现状,参照农艺和农机相互配合的要求,对比相关起苗机械的工作形式,设计出一种能够满足农艺要求的水稻钵育秧盘起盘机。
从机具的总装上,机具应首先满足作业基本要求,具有稳定的工作性能,可操作性强等基本条件。
并且还应该考虑在保证机具工作可靠性的前提下,使机具的结构更加的紧凑、各连接部件和切土部件有足够的强度和刚度,机具整机的各个部件要相对独立,便于拆卸、更换、安装。
2.3 起盘机的作业原理
起盘机机架为整体铆接结构,起盘铲固定在连接杆上,可随履带式行走机构一起运动。
起盘机整体向前运动时,推动固定在行走装置侧面的起盘铲向前做切削运动,将秧盘底端与土壤分离,以便于协作人员拾起。
作业时,首先清理机具在行走方向上的土壤,使机具的行走平面相对平整,减少行走机构在作业方向上机具的上下起伏,造成切土深度的变化或使秧盘直接遭到破坏。
作业后,切割的秧盘平放在土壤上,协作人员只需将秧盘拾起,摆放到秧盘运输车上便可。
2.4 起盘机行走装置的设计
水稻秧盘起盘机是专为水稻植质钵育秧盘起盘而设计的,由机架、起盘铲、连接杆及履带式行走机构等组成,履带式行走机构如图2-1 所示。
工作时,行走机构带动起盘铲向前运动并随之入土,当铲体对秧盘进行铲切时,铲体进行水平切割并将秧盘沿铲面向上铲起。
起盘铲沿水平面对秧盘底部进行切割,保证了秧盘底面的平整性,并使秧盘与地面分离,以便于随机工作人员拾起。