测试技术 第二章
- 格式:ppt
- 大小:336.50 KB
- 文档页数:12
第二章 测试装置的基本特性一、知识要点及要求(1)了解测试装置的基本要求,掌握线性系统的主要性质;(2)掌握测试装置的静态特性,如线性度、灵敏度、回程误差和漂移等;(3)掌握测试装置的动态特性,如传递函数、频率响应函数、单位脉冲响应函数; (4)掌握一、二阶测试装置的动态特性及其测试。
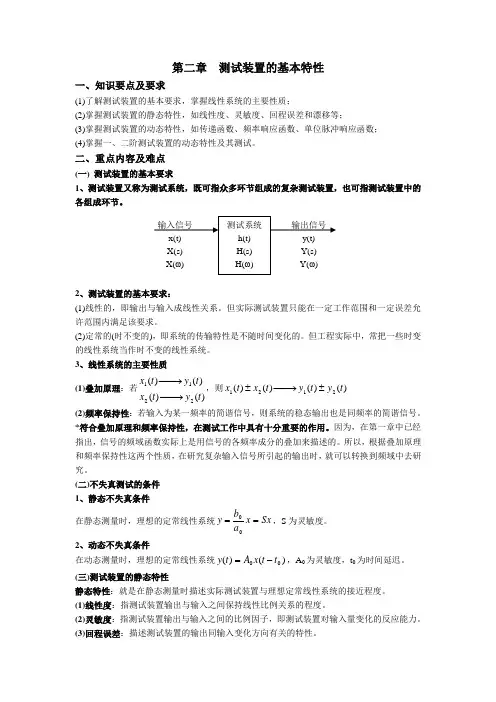
二、重点内容及难点(一) 测试装置的基本要求1、测试装置又称为测试系统,既可指众多环节组成的复杂测试装置,也可指测试装置中的各组成环节。
2、测试装置的基本要求:(1)线性的,即输出与输入成线性关系。
但实际测试装置只能在一定工作范围和一定误差允许范围内满足该要求。
(2)定常的(时不变的),即系统的传输特性是不随时间变化的。
但工程实际中,常把一些时变的线性系统当作时不变的线性系统。
3、线性系统的主要性质 (1)叠加原理:若)()()()(2211t y t x t y t x −→−−→−,则)()()()(2121t y t y t x t x ±−→−±(2)频率保持性:若输入为某一频率的简谐信号,则系统的稳态输出也是同频率的简谐信号。
*符合叠加原理和频率保持性,在测试工作中具有十分重要的作用。
因为,在第一章中已经指出,信号的频域函数实际上是用信号的各频率成分的叠加来描述的。
所以,根据叠加原理和频率保持性这两个性质,在研究复杂输入信号所引起的输出时,就可以转换到频域中去研究。
(二)不失真测试的条件 1、静态不失真条件在静态测量时,理想的定常线性系统Sx x a b y ==0,S 为灵敏度。
2、动态不失真条件在动态测量时,理想的定常线性系统)()(00t t x A t y -=,A 0为灵敏度,t 0为时间延迟。
(三)测试装置的静态特性静态特性:就是在静态测量时描述实际测试装置与理想定常线性系统的接近程度。
(1)线性度:指测试装置输出与输入之间保持线性比例关系的程度。
(2)灵敏度:指测试装置输出与输入之间的比例因子,即测试装置对输入量变化的反应能力。
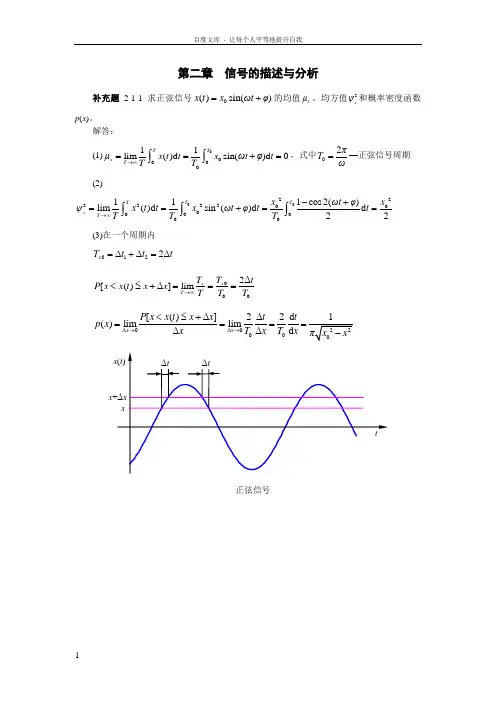
第二章 信号的描述与分析补充题2-1-1 求正弦信号0()sin()x t x ωt φ=+的均值x μ、均方值2x ψ和概率密度函数p (x )。
解答: (1)00011lim ()d sin()d 0TT x T μx t t x ωt φt TT →∞==+=⎰⎰,式中02πT ω=—正弦信号周期(2)2222220000111cos 2()lim()d sin ()d d 22TT T xT x x ωt φψx t t x ωt φt t TT T →∞-+==+==⎰⎰⎰(3)在一个周期内012ΔΔ2Δx T t t t =+=0002Δ[()Δ]limx x T T T tP x x t x x T T T →∞<≤+===22Δ0Δ0000[()Δ]2Δ2d ()limlim ΔΔd x x P x x t x x t t p x x T x T x πx x →→<≤+====-x (t )正弦信号xx +ΔxΔtΔtt2-8 求余弦信号0()sin x t x ωt 的绝对均值x μ和均方根值rms x 。
2-1 求图示所示锯齿波信号的傅里叶级数展开。
2-4周期性三角波信号如图所示,求信号的直流分量、基波有效值、信号有效值及信号的平均功率。
2-1 求图示所示锯齿波信号的傅里叶级数展开。
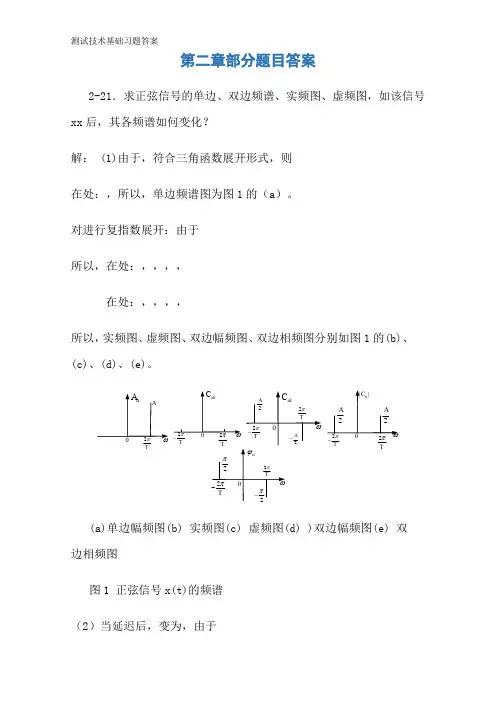
补充题2-1-2 求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|c n|–ω和φn–ω图,并与表1-1对比。
解答:在一个周期的表达式为00 (0)2() (0)2T A t x t T A t ⎧--≤<⎪⎪=⎨⎪≤<⎪⎩积分区间取(-T/2,T/2)00000002202002111()d =d +d =(cos -1) (=0, 1, 2, 3, )T T jn tjn tjn t T T n c x t et Aet Ae tT T T Ajn n n ωωωππ-----=-±±±⎰⎰⎰所以复指数函数形式的傅里叶级数为001()(1cos )jn tjn t n n n Ax t c ejn e n∞∞=-∞=-∞==--∑∑ωωππ,=0, 1, 2, 3, n ±±±。
现代测试技术习题解答--第二章--信号的描述与分析---副本第二章 信号的描述与分析补充题2-1-1 求正弦信号0()sin()x t x ωt φ=+的均值xμ、均方值2xψ和概率密度函数p (x )。
解答: (1)00011lim()d sin()d 0TT xT μx t t x ωt φt TT →∞==+=⎰⎰,式中02πTω=—正弦信号周期 (2)2222220000111cos 2()lim()d sin ()d d 22TT T xT x x ωt φψx t t x ωt φt t TT T →∞-+==+==⎰⎰⎰(3)在一个周期内12ΔΔ2Δx T t t t =+=0002Δ[()Δ]limx x T T T t P x x t x x T T T →∞<≤+===Δ0Δ000[()Δ]2Δ2d ()limlim ΔΔd x x P x x t x x t t p x x T x T x →→<≤+====正弦信号2-8 求余弦信号0()sin x t x ωt 的绝对均值xμ和均方根值rmsx 。
2-1 求图示2.36所示锯齿波信号的傅里叶级数展开。
2-4周期性三角波信号如图2.37所示,求信号的直流分量、基波有效值、信号有效值及信号的平均功率。
2-1 求图示2.36所示锯齿波信号的傅里叶级数展开。
补充题2-1-2 求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|c n |–ω和φn –ω图,并与表1-1对比。
图1-4 周期方波0 tx (T 02-T2T -……A -T 0解答:在一个周期的表达式为00 (0)2() (0)2T A t x t T A t ⎧--≤<⎪⎪=⎨⎪≤<⎪⎩积分区间取(-T/2,T/2)000000002202002111()d =d +d =(cos -1) (=0, 1, 2, 3, )L T T jn tjn tjn t T T n c x t et Aet Ae tT T T Ajn n n ωωωππ-----=-±±±⎰⎰⎰所以复指数函数形式的傅里叶级数为 001()(1cos )jn tjn t n n n Ax t c ejn e n∞∞=-∞=-∞==--∑∑ωωππ,=0, 1, 2, 3, n ±±±L 。
第二章一、选择题2. 测试装置的传递函数H(s)是装置动态特性在( D )中的描述。
A. 幅值域B. 时域C. 频率域D. 复频域3. 测试装置的频响函数H (jω)是装置动态特性在( C )中的描述。
A. 幅值域B. 时域C. 频率域D. 复频域4. 用常系数微分方程描述的系统称为( D )系统。
A. 相似B.物理C. 力学D. 线性5. 下列微分方程中,哪一个是线性系统的数学模型?( B )A. 225d y dy dx t y x dt dt dt ++=+B. 22d y dx y dt dt+= C. 22105d y dy y x dt dt -=+ D. x dt dx y dty d =+22 6. 线性系统的叠加原理表明( A )。
A. 加于线性系统的各个输入量所产生的响应过程互不影响B. 系统的输出响应频率等于输入激励的频率C. 一定倍数的原信号作用于系统所产生的响应,等于原信号的响应乘以该倍数D. 多个输入信号同时作用于系统所产生的响应,等于各个原信号的响应之和7. 测试装置能检测输入信号的最小变化能力,称为( D )。
A. 精度B. 灵敏度C. 精密度D. 分辨率8. 一般来说,测试系统的灵敏度越高,其测量范围( B )。
A. 越宽B. 越窄C. 不变D. 不一定9. 测试过程中,量值随时间而变化的量称为( C )。
A. 准静态量B. 随机变量C. 动态量D. 静态量10. 线性装置的灵敏度是( B )。
A. 随机变量B. 常数C. 时间的线性函数D. 时间的非线性函数11. 若测试系统由两个环节串联而成,且环节的传递函数分别为12(),()H s H s ,则该系统总的传递函数为( )。
若两个环节并联时,则总的传递函数为( )。
A. 12()()H s H s +B.12()()H s H s ⋅C.12()()H s H s -D.12()/()H s H s12. 输出信号与输入信号的相位差随频率变化的关系就是( B )。
2-1 一个测试系统与其输入和输出间的关系各有哪几种情形?试分别用工程实例加以说明。
答:测试系统与输入、输出的关系大致可以归纳为以下三类问题:(1)当输入和输出是可观察的或已知量时,就可以通过他们推断系统的传输特性,也就是求出系统的结构与参数、建立系统的数学模型。
此即 系统辨识 问题。
(2)当系统特性已知,输出可测时,可以通过他们推断导致该输出的输入量,此即滤波与预测问题,有时也称为载荷识别问题。
(3)当输入和系统特性已知时,则可以推断和估计系统的输出量,并通过输出来研究系统本身的有关结构参数,此即系统分析问题。
2-2什么是测试系统的静特性和动特性?两者有哪些区别?如何来描述一个系统的动特性? 答:当被测量是恒定的或是缓慢变化的物理量时,便不需要对系统做动态描述,此时涉及的就是系统的静态特性。
测试系统的静态特性,就是用来描述在静态测试的情况下,实际的测试系统与理想的线性定常系统之间的接近程度。
静态特性一般包括灵敏度、线性度、回程误差等。
测试系统的动态特性是当被测量(输入量)随时间快速变化时,输入与输出(响应)之间动态关系的数学描述。
静特性与动态性都是用来反映系统特性的,是测量恒定的量和变化的量时系统所分别表现出的性质。
系统的动态特性经常使用系统的传递函数和频率响应函数来描述。
2-3传递函数和频率响应函数均可用于描述一个系统的传递特性,两者有何区别?试用工程实例加以说明。
答:传递函数是在复数域中描述系统特性的数学模型。
频率响应函数是在频域中描述系统特性的数学模型。
2-4 不失真测试的条件时什么?怎样在工程中实现不失真测试?答:理想情况下在频域描述不失真测量的输入、输出关系:输出与输入的比值为常数,即测试系统的放大倍数为常数;相位滞后为零。
在实际的测试系统中,如果一个测试系统在一定工作频带内,系统幅频特性为常数,相频特性与频率呈线性关系,就认为该测试系统实现的测试时不失真测试。
在工程中,要实现不失真测试,通常采用滤波方法对输入信号做必要的预处理,再者要根据测试任务的不同选择不同特性的测试系统,如测试时仅要求幅频或相频的一方满足线性关系,我们就没有必要同时要求系统二者都满足线性关系。