基于组态软件的串级液位流量控制系统方案
- 格式:docx
- 大小:1.19 MB
- 文档页数:42
工业过程控制课程设计题目:基于组态软件的液位-液位串级控制系统设计院系名称:专业班级:学生姓名:学号:指导教师:设计地点:设计时间:设计成绩:指导教师:本栏由指导教师根据大纲要求审核后,填报成绩并签名。
摘要随着电子技术、计算机技术和信息技术的发展,工业生产中传统的检测和控制技术发生了根本性的变化。
液位作为化工等许多工业生产中的一个重要参数,其测量和控制效果直接影响到产品的质量,因此液位控制成为过程控制领域中的一个重要的研究方向。
液位控制是工业中常见的过程控制,它对生产的影响不容忽视。
该系统利用了常见的芯片,设计并实现了液位控制系统的智能性及显示功能。
电路组成简单,调试方便,性价比高,抗干扰性好等优点,能较好的实现水位监测与控制的功能。
能够广泛的应用于工业场所。
液位控制有很多方法,如,非接触传感。
只需要将传感器紧贴在非金属容器的外壁,就可以侦测到容器里面液位高度变化,从而及时准确地发出报警信号,有效防止液体外溢或防止机器干烧。
由于不需要与液体接触且安装简便,避免了水垢的腐蚀,可取代传统的浮球传感和金属探针传感,延长寿命。
而本设计是基于纯电路的设计,低成本且抗干扰性好。
在本设计中较好的实现了水位监测与控制的功能。
液位控制系统是以液位为被控参数的系统,液位控制一般是指对某控制对象的液位进行控制调节,以达到所要求的液位进行调节,以达到所要求的控制精度。
关键字:检测控制液位控制监测与控制目录1设计目的 (5)2控制要求 (5)3系统结构设计 (5)3.1 控制方案 (5)3.2 控制规律 (6)3.4 硬件连接 (9)4 系统组态设计 (10)4.1 组态软件介绍 (10)4.2 系统流程图 (11)4.3 系统组态图 (12)4.4 数据词典 (14)4.5 组态画面 (14)设计心得 (16)参考文献 (17)1 设计目的(1)加深对过程控制系统基本原理的理解和对过程仪表的实际应用能力。
(2)培养运用组态软件和计算机设计过程控制系统的实际能力。
本科毕业论文(设计)题目:基于组态王6.5的串级PID液位控制系统设计学院:自动化工程学院专业:自动化姓名: ### 指导教师: ###2011年 6 月 5 日Cascade level PID control system based on Kingview 6.5摘要开发经济实用的教学实验装置、开拓理论联系实际的实验容,对提高课程教学实验水平,具有重要的实际意义。
就高校学生的实验课程来讲,由于双容水箱液位控制系统本身具有的复杂性和对实时性的高要求,使得在该系统上实现基于不同控制策略的实验容,需要全面掌握自动控制理论及相关知识。
本文通过对当前国外液位控制系统现状的研究,选取了PID控制、串级PID控制等策略对实验系统进行实时控制;通过对实验系统结构的研究,建立了单容水箱和双容水箱实验系统的数学模型,并对系统的参数进行了辨识;利用工业控制软件组态王6.5,并可通用于ADAM模块及板卡等的实现方案,通过多种控制模块在该实验装置上实验实现,验证了实验系统具有良好的扩展性和开放性。
关键词:双容水箱液位控制系统串级PID控制算法组态王6.5 智能调节仪AbstractIt is significant to develop applied experiment device and experiment content which combines theory and practice to improve experimental level of teaching. Based on the current situation of domestic and international level control system, selected the PID control, cascade PID control strategies such asreal-time control of experiment system.Through the study of the structure of experimental system, a single let water tank and double let water tank experiment system mathematical model was founded, and the parameters of the system is identified.Industrial control software configuration king 6.5 is used in experiment, ADAM module and boards, etc can also be suitable for this experiment, through a variety of control module on the device in the experiment verified experimental realization, experimental system has good expansibility and openness.Key Word Double let water tank liquid level control system Cascade PID control algorithm Configuration king 6.5 Intelligent adjusting instrument目录前言 (1)第一章串级液位控制系统介绍 (2)1.1 国外研究现状 (2)1.1.1液位控制系统的发展现状 (2)1.1.2液位控制系统算法的研究现状 (2)1.2 PID控制算法的介绍 (3)1.2.1 PID控制算法的历史 (3)1.2.2 PID控制各环节作用 (4)1.3 串级控制系统介绍 (4)1.4 本文的主要工作 (4)第二章水箱液位控制系统的建模 (6)2.1 水箱液位控制系统的构成 (6)2.2 水箱的建模过程 (7)2.2.1 单容水箱的建模过程 (7)2.2.2 二阶双容水箱的对象特性 (8)2.3水箱液位控制参数辨识方法 (11)2.3.1 单容上水箱的参数辨识 (11)2.3.2 二阶双容水箱的下水箱对象参数辨识 (12)2.4 水箱液位PID参数整定方法 (14)2.4.1上水箱液位的PID整定 (14)2.4.2 主回路和副回路的PID参数整定 (15)第三章组态王6.5简介与操作界面的设计 (17)3.1 组态王6.5简介 (17)3.2基于组态王6.5的液位控制系统上位机部分设计 (18)3.2.1 建立新工程 (18)3.2.2定义外部设备 (19)3.2.3动画设计 (21)3.2.3 组态王6.5的控件中选择历史曲线绘制 (23)第四章设计实验 (24)4.1 设备的连接和检查 (24)4.2 系统连线 (24)4.3 实验步骤 (25)第五章总结与展望 (30)辞 (31)参考文献 (32)前言随着现代科学技术的迅猛发展,工业生产的规模越来越大,结构也越来越复杂,从而使控制对象、控制器以及控制任务和目的日益复杂,而对系统的精度、响应速度和稳定性的要求却越来越高。
摘要应用组态软件设计一个仿真实验监控系统,实现对实际工程问题的过程控制,现在我们的具体问题是实现对水箱液位过程控制。
为了能设计一个解决实际工程问题的仿真实验监控系统,我们可以基于各种组态软件来设计这个仿真平台.而MCGS组态软件具有操作简便、可视性好、可维护性强、高性能等突出特点,它可以快速构造和生成上位机监控系统,并可稳定运行于多种操作系统.。
以MCGS组态软件为开发平台,设计一个仿真实验监控平台来实现对实际工程问题的控制.不仅能对水箱的液位进展监控,采集实验数据建立实验报表,而且能够脱机进展仿真实验、模拟控制。
为了能够很好的实现对水箱液位控制系统的仿真,综合考虑多方面的因素,本文将用MCGS组态软件设计一个仿真实验监控平台来对其进展实时控制.具体地,要将MCGS组态软件实现此方案。
在该系统中,利用MCGS组态软件完成数据采集、控制信息输出以及人机交互等工作,完成仿真实验监控平台的设计,最终到达对水箱液位实时监控,实验数据采集,报表的输出和数据的同步显示。
关键词:MCGS组态软件;液位系统;仿真实验AbstractTo design a simulation experiment monitoring platform with application configuration software, realizing the actual engineering problems of process control, currently, our concrete problem is to achieve the temperature of the boiler and water tank level process control.In order to be able to solve real engineering problems to design a simulation experiment monitoring platform, we can base on a variety of configuration software to design this simulation platform. The MCGS configuration software has simple operation, perfect visibility, strong maintainability, high performance and other salient features. It can construct and generate hostputer monitoring system quickly, and can be run on different kinds of operating systems steadily.With MCGS configuration software development platform, designing a simulation experiment monitor platform to achieve the process control of the actual engineering problems. Not only can monitorthe level of the water tank and the temperature of the boiler, gathering the experiment data and establishing experiment reports, but also can do the off-line simulation experiment, simulation control.In order to control the water tank level and the water temperature of boiler well. Take a prehensive consideration on various factors; this article will design a simulation experiment monitoring platform with MCGS configuration software to achieve the real-time control for this system. Specifically, we should use MCGS configuration software to implement this program. In this system, realizing the data acquisition, controlling information output, as well as the human-machine interaction by the MCGS configuration software, and acplishing the design of the simulation experiment monitoring platform, which can to achieve the level of the water tank and the water temperature of the boiler in real-time monitoring, experimental data collection, report forms of the output and synchronized curve display ultimately.Key Words:MCGS configuration software; liquid level system; simulation experiment目录1绪论错误!未定义书签。
新疆工程学院课程设计题目:基于MCGS组态软件的水位控制系统目录前言 (1)1.设计概述 (2)1.1 设计任务介绍 (2)1.2 设计系统组成框图 (2)1.3 设计分析 (2)1.4. 设计所用软件介绍 (3)1.4.1什么是MCGS组态软件 (3)1.4.2 MCGS组态软件的系统构成 (3)1.4.3 MCGS组态软件的功能和特点 (5)1.4.4 MCGS组态软件的工作方式 (5)2 设计思路 (6)3 组态画面的设计 (7)3.1 工程建立 (7)3.2建立流程画面 (7)3.3 定义数据对象 (8)3.4.动画连接 (9)3.5模拟设备连接 (9)3.6 控制流程 (10)3.7 报警显示 (10)3.8 报表输出 (12)3.9 趋势曲线显示 (13)3.10 安全机制 (13)3.11 水位控制系统总效果 (16)4总结 (17)5参考文献 (18)前言计算机技术和网络技术的飞速发展,为工业自动化开辟了广阔的发展空间,用户可以方便快捷地组建优质高效的监控系统,并且通过采用远程监控及诊断、双机热备等先进技术,使系统更加安全可靠,在这方面,MCGS工控组态软件将为您提供强有力的软件支持。
MCGS是一种流行的组态软件开发环境,组态技术是计算机控制技术综合发展的结果,是技术成熟化的标志。
MCGS通用版组态软件主要完成通用工作站的数据采集和加工,实时和历史数据处理、报警和安全机制、流程控制、动画显示、趋势曲线和报表输出等日常性监控事务。
对工作站软件的要求主要是系统稳定可靠,能方便的代替大量的现场工作人员的劳动和完成对现场的自动监控和报警处理,随时或定时的打印各种报表。
由于组态技术的介入,计算机控制系统的应用速度大大加快了。
采用组态控制技术的计算机控制系统最大的特点是从硬件设计到软件开发都具有组态性,因此系统的可靠性和开发速度提高了,开发难度却下降了。
随着国内工业生产技术的进步以及自动化技术的发展,人们对自动化监控系统的需求越来越大,要求越来越高。
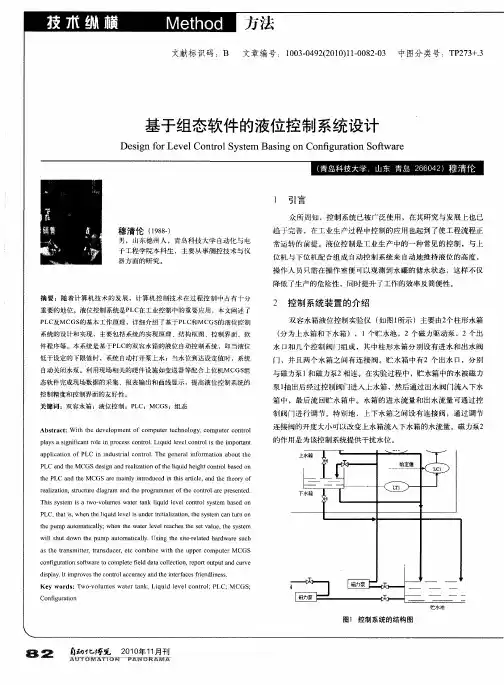
基于组态软件的液位—液位串级控制系统设计液位—液位串级控制系统是指通过控制多个液位传感器的液位信号,来实现多个液位控制阀门的自动调节,以达到控制系统中多个液位的目标值的系统。
组态软件是指一种用于编程和配置自动化系统的软件工具,它可以通过图形化界面来配置系统的控制逻辑,监视系统的状态并进行调试。
在液位—液位串级控制系统中,组态软件可以用于设计控制逻辑、配置传感器和执行器、进行调试和监视等工作。
本文将详细介绍基于组态软件的液位—液位串级控制系统的设计过程和关键技术。
首先,我们需要确定系统的目标和需求。
例如,我们可能需要将液位控制在一定的范围内,或者需要保持不同液位之间的差值在一定的范围内。
根据具体的需求,我们可以确定系统中需要使用的液位传感器数量和位置。
接下来,我们需要选择合适的液位传感器。
液位传感器的选择应该考虑到被测液体的性质、液体的压力和温度范围、传感器的精度和可靠性等因素。
常见的液位传感器包括浮球液位传感器、电容式液位传感器、压力式液位传感器等。
然后,我们需要选择合适的执行器,用于控制液位阀门的开关。
执行器可以是电磁阀、调节阀等。
选择执行器时,需要考虑其控制精度、响应速度和使用寿命等因素。
接着,我们可以使用组态软件来进行系统的设计和配置。
组态软件通常提供了一个图形化界面,可以通过拖拽和连接元件来设计控制逻辑。
我们可以将液位传感器和执行器等元件添加到画布中,并进行连接和配置。
例如,我们可以将液位传感器的输出信号连接到执行器的输入端口,并设置液位的目标值和控制算法等参数。
在配置完成后,我们可以使用组态软件提供的调试和监视工具来检查系统的状态和调整控制参数。
例如,我们可以使用组态软件提供的实时监视功能来查看液位传感器的读数和执行器的状态。
如果系统的反馈不符合预期,我们可以通过调整控制参数来优化系统的性能。
最后,我们需要进行系统的联调和测试。
在联调过程中,我们需要验证系统的各个组件之间的协作是否正常,并调整参数来使系统达到预期的控制效果。
基于组态王6.5+DDC的流量液位串级控制系统设计【摘要】:在过程控制实验室的硬件基础上开发基于组态软件组态王(Kingview)6.5的流量液位串级控制实验系统,该实验系统完全可模拟工业生产过程中过程装置的流量、液位等工艺参数的自动控制。
该串级控制系统可以满足不同专业自动化控制科研与教学的需要。
【关键词】:串级控制系统;组态软件组态王中国分类号:TN6 文献标识码:A 文章编号:1002-6908(2007)0120057-011. 主要问题本次设计主要是完成流量液位串级控制系统的设计,组态,调试和对系统数据的分析。
如何设计合理的数字PID 控制算法,用组态王6.5实现对实验设备的监视控制,如何获取实验设备的控制数据和实现实时曲线和历史曲线的显示,如何进行参数整定,如何合理分析实验数据是要解决的主要问题。
2. 组态王组态原理“组态王”把每一台与之通讯的设备看作是外部设备,为实现组态王和外部设备的通讯,组态王通过内置的大量设备的驱动作为组态王和外部设备的通讯接口,在开发过程中只需根据工程浏览器提供的”设备配置向导”一步步完成连接过程即可实现组态王和相应外部设备驱动的连接,如图1组态王通讯原理图。
在运行期间,组态王就可通过驱动接口和外部设备交换数据,包括采集数据和发送数据/指令。
从而实现组态王对设备运行情况的监测和控制。
串级控制系统是在单回路PID控制的基础上发展起来的一种应用非常普遍的控制技术。
虽然单回路PID控制在控制一个变量时,大都能够完成控制任务。
但是,当系统中同时有几个因素影响同一个变量,或对象的容量滞后较大,负荷或干扰变化比较剧烈或比较频繁,或调节质量要求很高,或控制任务比较特殊,则采用单回路控制的方案就无效了。
串级控制系统就是在单回路的基础上,加入另一个PID单回路控制系统作为副回路,将两个单回路控制系统以一定的结构形式串联在一起,以实现很好的控制效果。
一般来说,主回路的选择是由主变量来确定的,多数由工艺要求决定;副变量的选择对于串级系统的设计至关重要,一般要求副变量能很好的影响主变量、副回路包括主要的和较多的干扰。
过程控制系统课程设计题 目: 基于组态软件的流量比值过程控制系统设计院系名称: 自动化 专业班级: 1002学生姓名: 秦凯新学 号: 201046820427指导教师:王伟生 设计地点: 31520 设计时间: 2013/7/2摘要随着科学技术的飞速发展,人们对过程控制提出了更高更新的要求,在许多生产过程中,要求两种或两种以上的物料流量成一定的比例关系混合进行化学反应,对于物料比例的要求就变得甚为严格,如果比例不能满足要求,或是比例失调,则会导致产品的质量达不到要求,以致造成损失,严重时会导致事故的发生。
例如在制药过程中,为增加药效,需要对其中成分药物加注入剂,生产工艺要求药物和注大剂混台后的含量必须符合要求的比例,否则会使药效降低而达不到要求。
研究比值控制系统很有必要,提高比值控制的精度及水平具有深远的意义。
关键字:物料流量比例比值控制系统深远的意义目录引言 (1)1设计目的与要求 (1)1.1 设计目的 (1)1.2 设计要求 (2)2系统结构设计 (2)2.1 控制方案 (2)2.2 系统结构流程 (2)3 过程仪表选择 (3)3.1 流量检测传感器 (3)3.2 电动调节阀 (4)3.3 水泵 (4)3.4 过程模块 (5)4 系统组态设计 (6)4.1 工艺流程图 (6)4.2组态画面 (6)4.3 数据字典 (9)4.4 应用程序 (11)4.5 动画连接 (13)5实验总结 (14)6 参考文献 (14)引言在工业产品生产中,经常需要两种或两种以上的物料按一定比例混合或进行生产,如果比例失调,轻则造成产品质量不合格,重则会造成生产事故或发生人身伤害,给企业带来较大的损失。
实现两个或两个以上参数符合一定比例关系的控制系统,称为比值控制系统.由于过程工业中大部分物料都是以气态,液态或混合的流体状态在密闭管道,容器中进行能量传递与物质交换,所以保持两种或几种物料的比例实际上是保持两种或几种物料的流量比例关系,因此比值控制系统一般是指流量比值控制系统.该设计以电动调节阀为中心对控制回路的液体的流量进行比例控制,从而实现对压力流量温度液位等参数的调节。
基于MCGS组态编程的液位控制系统设计液位控制系统是一种用于监测和控制液体在容器中的水平高度的技术。
在工业领域中,液位控制系统被广泛应用于仓储、化工、石油、生物工程等领域。
随着MCGS(Master Control & Graphic System)组态编程技术的发展,液位控制系统的设计变得更加简单和灵活。
液位控制系统一般由传感器、控制器、执行器等组成。
传感器可以监测液位的变化,并将信号传输给控制器。
控制器根据传感器的信号来判断液位的高低,并通过执行器来实现对液位的控制。
在MCGS组态编程的液位控制系统设计中,首先需要进行硬件的连接和配置。
将传感器、控制器和执行器按照系统要求连接起来,并在MCGS软件中对其进行配置和初始化。
该步骤通常需要一定的硬件和软件知识。
接下来,需要在MCGS软件中进行系统界面的设计。
通过MCGS的图形化界面设计工具,可以轻松地创建系统的监控界面。
在液位控制系统中,可以设计一个仪表盘,显示当前液位的数值和状态。
同时,还可以设计一个趋势图,记录液位的历史变化。
通过这些界面,操作员可以直观地了解液位的实时情况。
在系统界面设计完成后,接下来需要进行程序的编写。
MCGS提供了丰富的编程功能,可以通过简单的拖拽和连接来实现各种逻辑控制。
在液位控制系统中,可以根据液位传感器的信号来判断液位的高低,并根据设定的阈值来控制执行器的动作。
例如,当液位超过高阈值时,执行器关闭进水阀门;当液位低于低阈值时,执行器打开排水阀门。
通过这样的逻辑控制,可以实现对液位的稳定控制。
在实际应用中,液位控制系统不仅要求准确可靠,还需要具备一定的安全性。
因此,在设计过程中,需要考虑到各种故障和异常情况的处理。
例如,当传感器故障时,控制器应能够发出警报并采取相应的控制措施;当执行器故障时,控制器应能够及时检测到并进行报警。
总之,基于MCGS组态编程的液位控制系统设计,可以使系统的设计和调试更加简单和灵活。
课程设计说明书(2012 /2013 学年第一学期)课程名称:工业监控系统工程设计题目:液位和流量串级控制系统专业班级:学生姓名:学号:指导教师:设计周数: 2周设计成绩:2013年 1月 4日目录1 课程设计目的 (3)2 课程设计设备 (3)3 课程设计原理 (3)4 课程设计内容和步骤 (3)4.1设备的连接和检查 (4)4.2实验接线 (4)4.3启动实验装置 (5)4.4实验步骤 (6)5 实验设计收获、体会和建议 (9)6 参考文献 (10)液位和流量串级控制系统一、课程设计目的1)、掌握串级控制系统的基本概念和组成。
2)、掌握串级控制系统的投运与参数整定方法。
3)、研究阶跃扰动分别作用在副对象和主对象时对系统主被控量的影响。
二、课程设计设备ICP-7017远程数据采集输入模块、ICP-7024远程数据采集模拟量输出模块、计算机、串口线1根。
三、课程设计原理因为流量变化瞬速,做为副调节器调节对象,中水箱液位做为主调节器调节对象。
控制框图如图所示:四、课程设计内容和步骤串级控制系统是改善控制质量的有效方法之一,在过程控制中得到广泛地应用,串级控制系统是指不止采用一个控制器,而是将两个或几个控制器相串级,是将一个控制器的输入作为下一个控制器设定值的控制系统。
实验以串级控制系统来控制下水箱液位,以第二支路流量为副对象,右边水泵直接向下水箱注水,流量变动的时间常数小、时延小,控制通道短,从而可加快提高响应速度,缩短过渡过程时间,符合副回路选择的超前,快速、反应灵敏等要求。
下水箱为主对象,流量的改变需要经过一定时间才能反应到液位,时间常数比较大,时延大。
如图所示,设计好下水箱和流量串级控制系统。
将主调节器的输出送到副调节器的给定,而副调节器的输出控制执行器。
由上分析副调节器选纯比例控制,正作用,自动。
主调节器选用比例控制或比例积分控制,反作用,自动。
反复调试,使第二支路的流量快速稳定在给定值上,这时给定值应与副反馈值相同。
基于组态软件的水位控制系统设计一教学目标终极目标:能应用通用版及嵌入版MCGS组态软件基本功能进行简单项目设计、仿真运行。
促成目标:1)掌握MCGS通用版及嵌入版基本操作,完成工程分析及变量定义。
2)掌握简单界面设计,完成数据对象定义及动画连接。
3)掌握模拟设备连接方法,完成简单脚本程序编写及报警显示。
4)掌握制作工程报表及曲线方法。
二工作任务用MCGS通用版及嵌入版分别完成图1-1所示水位控制系统的设计、仿真运行。
图1-1 水位控制系统实验一水位控制工程文件建立一、教学目标终极目标:能建立MCGS新工程。
促成目标:1)掌握MCGS组态软件的安装与运行方法。
2)能进行工程分析,建立工程文件。
二、工作任务建立水位控制系统工程文件。
三、能力训练MCGS (Monitor and Control Generated System,通用监控系统)是一套用于快速构造和生成计算机监控系统的组态软件,充分利用了Windows图形功能完备、界面一致性好、易学易用的特点,比以往使用专用机开发的工业控制系统更具有通用性,在自动化领域有着更广泛的应用。
1.MCGS的安装1)启动Windows。
2)在相应的驱动器中插入光盘。
插入光盘后会自动弹出MCGS安装程序窗口(如没有窗口弹出,则从Windows的“开始”菜单中,选择“运行...”命令,运行光盘中AutoRun.exe文件),MCGS安装程序窗口如图1-2所示:3)在安装程序窗口中选择“安装MCGS组态软件通用版”,启动安装程序开始安装。
安装程序将提示指定安装目录,用户不指定时,系统缺省安装到D:\MCGS目录下,如图1-3所示:图1-2 MCGS安装程序窗口图1-3 安装目录安装过程大约要持续数分钟,MCGS系统文件安装完成后,安装程序要建立象标群组和安装数据库引擎,这一过程可能持续几分钟,请耐心等待。
4)安装完成后,安装程序将弹出“设置完成”对话框,上面有两个复选框,“是,我现在要重新启动计算机”和“不,我将梢后重新启动计算机”。
本科毕业论文(设计)题目:基于组态王6.5的串级PID液位控制系统设计学院:自动化工程学院专业:自动化姓名: ### 指导教师: ###2011年 6 月 5 日Cascade level PID control system based on Kingview 6.5摘要开发经济实用的教学实验装置、开拓理论联系实际的实验容,对提高课程教学实验水平,具有重要的实际意义。
就高校学生的实验课程来讲,由于双容水箱液位控制系统本身具有的复杂性和对实时性的高要求,使得在该系统上实现基于不同控制策略的实验容,需要全面掌握自动控制理论与相关知识。
本文通过对当前国外液位控制系统现状的研究,选取了PID控制、串级PID控制等策略对实验系统进行实时控制;通过对实验系统结构的研究,建立了单容水箱和双容水箱实验系统的数学模型,并对系统的参数进行了辨识;利用工业控制软件组态王6.5,并可通用于ADAM模块与板卡等的实现方案,通过多种控制模块在该实验装置上实验实现,验证了实验系统具有良好的扩展性和开放性。
关键词:双容水箱液位控制系统串级PID控制算法组态王6.5 智能调节仪AbstractIt is significant to develop applied experiment device and experiment content which combines theory and practice to improve experimental level of teaching. Based on the current situation of domestic and international level control system, selected the PID control, cascade PID control strategies such asreal-time control of experiment system.Through the study of the structure of experimental system, a single let water tank and double let water tank experiment system mathematical model was founded, and the parameters of the system is identified.Industrial control software configuration king 6.5 is used in experiment, ADAM module and boards, etc can also be suitable for this experiment, through a variety of control module on the device in the experiment verified experimental realization, experimental system has good expansibility and openness.Key Word Double let water tank liquid level control systemCascade PID control algorithmConfiguration king 6.5Intelligent adjusting instrument目录前言0第一章串级液位控制系统介绍11.1 国外研究现状11.1.1液位控制系统的发展现状11.1.2液位控制系统算法的研究现状21.2 PID控制算法的介绍31.2.1 PID控制算法的历史31.2.2 PID控制各环节作用41.3 串级控制系统介绍51.4 本文的主要工作5第二章水箱液位控制系统的建模72.1 水箱液位控制系统的构成72.2 水箱的建模过程82.2.1 单容水箱的建模过程82.2.2 二阶双容水箱的对象特性102.3水箱液位控制参数辨识方法122.3.1 单容上水箱的参数辨识122.3.2 二阶双容水箱的下水箱对象参数辨识142.4 水箱液位PID参数整定方法162.4.1上水箱液位的PID整定162.4.2 主回路和副回路的PID参数整定17第三章组态王6.5简介与操作界面的设计20 3.1 组态王6.5简介203.2基于组态王6.5的液位控制系统上位机部分设计213.2.1 建立新工程213.2.2定义外部设备233.2.3动画设计243.2.3 组态王6.5的控件中选择历史曲线绘制26第四章设计实验274.1 设备的连接和检查274.2 系统连线284.3 实验步骤30第五章总结与展望30辞31参考文献37前言随着现代科学技术的迅猛发展,工业生产的规模越来越大,结构也越来越复杂,从而使控制对象、控制器以与控制任务和目的日益复杂,而对系统的精度、响应速度和稳定性的要求却越来越高。
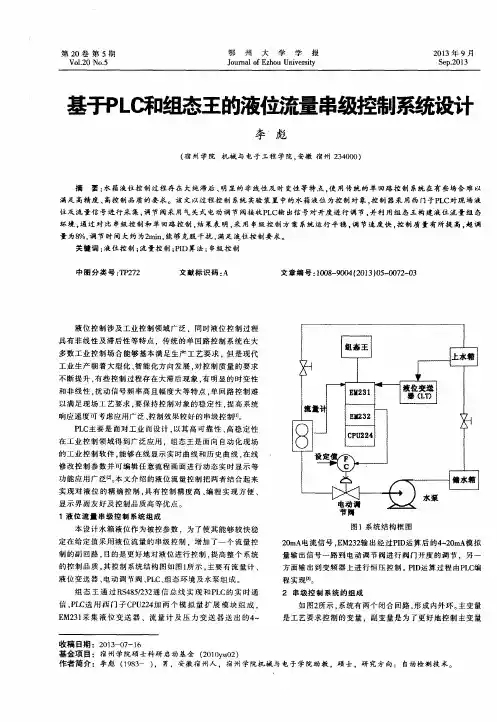
基于组态王液位控制系统设计摘要以下介绍了PLC和组态软件的液位控制系统的设计方案,采用PID算法,实现液位的自动控制,利用组态软件设计人机界面,通过串口与PLC通信,实现实时监控、现场数据采集与处理、监控。
The following describes the design scheme of level PLC and the configuration software of the control system, using PID algorithm, realizes the automatic control level, using the configuration software design of man-machine interface, through the serial communication with PLC, to achieve real-time monitoring, data acquisition and processing, monitoring.关键词:PLC控制组态王软件目录1题目 (1)2摘要 (1)3目录 (2)4引言 (3)4.1 关于组态王的概述 (3)4.2 组态王与I/O设备 (10)4.3 组态王的开放性 (10)4.4 西门子PLC介绍 (10)5系统设计 (15)5.1 PLC程序 (15)5.1.1 外部接线 (15)5.1.2 程序编写 (15)5.2 组态王程序 (20)5.2.1 启动浏览器新建工程 (20)5.2.2 设备定义 (20)5.2.3 变量定义 (21)5.2.4 画面控制 (23)5.2.5 动画链接及案件程序编写 (23)5.2.6 配置系统程序编写 (32)5.3运行调试 (35)6致谢 (39)7参考文献 (40)引言4.1 关于组态王的概述组态王软件是一种通用的工业监控软件,它融过程控制设计、现场操作以及工厂资源管理于一体,将一个企业内部的各种生产系统和应用以及信息交流汇集在一起,实现最优化管理。
基于组态软件的串级液位流量控制系统1概述1.1本课程设计课题研究的意义随着现代工业生产过程向着大型、连续和强化方向发展,对控制系统的控制品质提出了日益增长的要求。
在这种情况下,简单的单回路控制已经难以满足一些复杂的控制要求。
在单回路控制方案基础上提出的串级控制方案,则对提高过程控制的品质有极为明显的效果。
串级控制系统具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。
因此,串级控制系统的控制质量一般都比单回路控制系统好,而且串级控制系统利用一般常规仪表就能够实现,所以,串级控制是一种易于实现且效果又较好的控制方法。
本课程设计课题讨论了一个简单的液位流量串级控制系统的设计方法及步骤。
液位和流量是工业生产过程中最常用的两个测控参数,因此本课程设计课题具有较大的现实意义。
1.2 设计的目的通过课程设计,加深对所学传感器技术、自动控制原理、转换技术以及过程控制的基本原理等基本原理、基本知识的理解和应用,掌握串级控制系统的设计步骤和方法,掌握工程整定参数方法,培养运用组态软件和计算机设计过程控制系统的实际能力,培养创新意识,增强动手能力,为今后工作打下一定的理论和实践基础。
1.3 设计要求(1)根据液位-流量串级过程控制系统的具体对象和控制要求,独立设计控制方案,正确选用过程仪表。
(2)根据液位-流量串级过程控制系统A/D、D/A和开关I/O的需要,正确选用过程模块。
(3)根据与计算机串行通讯的需要,正确选用RS485/RS232转换与通讯模块。
(4)运用组态软件,正确设计液位-流量串级过程控制系统的组态图、组态画面和组态控制程序。
2 系统控制方案2.1 控制系统在实际应用中的重要意义单回路控制系统是过程控制中结构最简单的一种形式,它只用一个调节器,调节器也只有一个输入信号,从系统方框图看,只有一个闭环。
在大多数情况下,这种简单系统已经能够满足工艺生产的要求。
但有些调节对象的动态特性虽然并不复杂,但控制的任务却比较特殊,则单回路控制系统就无能为力了。
另外,随着生产过程向着大型、连续和强化方向发展,对操作条件要求更加严格,参数间相互关系更加复杂,对控制系统的精度和功能提出许多新的要求,对能源消耗和环境污染也有明确的限制。
为此,需要在单回路的基础上,采取其它措施,组成复杂控制系统,而串级控制系统就是其中一种改善和提高控制品质的极为有效的控制系统。
液位和流量是工业生产过程中最常用的两个参数,对液位和流量进行控制的装置在工业生产中应用的十分普遍。
液位的时间常数T一般很大,因此有很大的容积迟延,如果用单回路控制系统来控制,可能无法达到较好的控制质量。
而串级控制系统可以用一般常规仪表来实现,成本增加也不大,却可以起到十分明显的提高控制质量的效果,因此往往采用串级控制系统对液位进行控制。
一般情况下,流量是影响液位的主要因素,其时间常数较小,将它纳入副回路进行控制,不仅有效地克服了流量对液位造成的干扰,而且使系统工作频率提高,能够对液位实行较快的控制。
2.2控制方案在本系统中被控参量有两个,上水箱液位和管道流量,这两个参量具有相关联系,流量的大小可以影响上水箱液位,根据流量与液位的关系,故系统采用串级控制,环为流量控制,外环为液位控制。
环与外环的控制算法均采用PID算法,PID算法实现简单,控制效果好,系统稳定性好。
外环液位控制器的输出作为环流量控制器的设定值,流量控制器的输出来控制调节阀的大小,来控制管道流量的大小,进而控制上水箱液位。
2.3控制规律本设计采用的是工业控制中最常用的PID控制规律,环与外环的控制算法采用PID算法,PID算法实现简单,控制效果好,系统稳定性好,外环PID的输出作为环的输入,环跟随外环的输出。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
它结构简单,参数易于调整,在长期的应用中积累了丰富的经验。
其主要特点是:(1)技术成熟;PID调节是连续系统理论术最成熟、应用最广泛的控制方法,它的结构灵活,不仅可实现常规的PID调节,而且还可根据系统的要求,采用PI、PD、带死区的PID控制等;(2)不需求出系统的数学模型;(3)控制效果好。
虽然计算机控制是非连续的,但由于计算机的运算速度越来越快,因此用数字PID完全可代替模拟调节器,并且能得到比较满意的效果。
2.4 系统结构设计整个过程控制系统由控制器、调节器、测量变送、被控对象组成。
在本次控制系统中控制器为计算机,采用算法为PID控制规律,调节器为电磁阀,测量变送为HB、FT 两个组成,被控对象为流量PV。
结构组成如下图2.2所示。
当系统启动后,水泵开始抽水,通过管道分别将水送到上水箱和下水箱,由HB返回信号,是否还需要放水到下水箱。
若还需要(即水位过低),则通过电磁阀控制流量的大小,加大流量,从而使下水箱水位达到合适位置;若不需要(即水位过高或刚好合适),则通过电磁阀使流量保持或减小。
其过程控制系统图如图2.1所示。
过程控制系统由四大部分组成,分别为控制器、调节器、被控对象、测量变送。
本次设计为流量回路控制,即为闭环控制系统,如下图2.2图2.2 液位单回路控制系统框图2.5 控制系统的总体方框图及工作过程图2.3计算机控制上水箱液位和流量串级系统控制框图被控对象为图2.3中所示液位被控对象的工作原理、传递函数及理论推导如下:单容水箱如图2.1所示,Q i为入口流量,由调节阀开度μ加以控制,出口流量则由电磁阀控制产生干扰。
被调量为水箱中的水位H,它反映水的流入与流出量之间的平衡关系。
现在分析水位在电磁阀开度扰动下的动态特性。
显然,在任何时刻水位的变化均满足下述物料平衡方程:dH dT =1F(F F−F F)(2.1)其中F F=F F F (2.2)F F=F√F(2.3)F为水箱的横截面积;F F是决定于阀门特性的系数,可以假定它是常数;k 是与电磁阀开度有关的系数,在固定不变的开度下,k可视为常数。
液位的传递函数: F(F)F F(F)=2√F0F2F0FFF+1(2.4)3 过程仪表的选择3.1液位传感器液位传感器(静压液位计/液位变送器/液位传感器/水位传感器)是一种测量液位的压力传感器.静压投入式液位变送器(液位计)是基于所测液体静压与该液体的高度成比例的原理,采用国外先进的隔离型扩散硅敏感元件或瓷电容压力敏感传感器,将静压转换为电信号,再经过温度补偿和线性修正,转化成标准电信号(一般为4~20mA/1~5VDC)。
它分为两类:一类为接触式,包括单法兰静压/双法兰差压液位变送器,浮球式液位变送器,磁性液位变送器,投入式液位变送器,电动浮球液位变送器,电动浮筒液位变送器,电容式液位变送器,磁致伸缩液位变送器,侍服液位变送器等。
第二类为非接触式,分为超声波液位变送器,雷达液位变送器等。
常见几种液位传感器的比较 1.雷达液位传感器原理:D=L−CT/2雷达液位传感器发射—反射—接收的工作模式。
雷达液位传感器的天线发射出电磁波,这些波经被测对象表面反射后,再被天线接收,电磁波从发射到接收的时间与到液面的距离成正比。
该类型传感器一般绝对误差在2mm左右,测量围一般是0.5m-20m,由于其非接触的测量原理相对磁尺来说对被测介质围就比较广,液体,固体(物位)都可以。
缺点主要是精度不够高,在短量程方面有暗区,由于电磁波不能受到干扰,安装时应避免障碍物,同时也应避免温度等因数对电磁波的影响。
另外在界面方面,特别是密度相差不是很大界面方面,远远不如磁尺方便准确。
2.超声波液位传感器原理与雷达液位传感器相同,只是相对雷达的电磁波,超声波液位传感器是利用空气的声纳原理,发射和接受的是一种超声波。
从性能上来说,超声波比雷达具有更稳定的性能。
3. 浮球式液位(界面)传感器此类传感器的工作基于浮子的浮力及磁性原理。
当浮子随着液位(界面)上下浮动,浮子永磁体的磁力作用于导管的干簧管,使相应高度的干簧管闭合,得到正比于液位的电压信号,经转换器转换成4~20mA.DC的标准信号。
磁浮子传感器最大的特点就是精度不高,某厂家产品的一组数据为:测量围L,当500<L>1000时,精度为1.5%,当L>1000时,精度为1.0%.测量围主要集中在4m以下。
相对来讲,在界面测量方面有很稳定的性能。
4. 磁翻板式液位计磁翻板式液位计是以磁性浮子为感应元件,并通过磁性浮子与显示色条中磁性体的耦合作用,反映被测液位或界面的测量仪表。
磁浮子式液位计和被测容器形成连通器,保证被测量容器与测量管体间的液位相等。
当液位计测量管中的浮子随被测液位变化时,浮子中的磁性体与显示条上显示色标中的磁性体作用,使其翻转,红色表示有液,白色表示无液,以达到就地准确显示液位的目的。
此类传感器具有显示直观醒目、不需电源,安装方便可靠,维护量小,维修费用低的优点,是玻璃管、玻璃板液位计的升级换代产品。
但测量精度不高,一般厂家标称的误差都在10mm到20mm之间。
如果需要把现场的数据远传还需要加一个相应数据远传变送器,如下图所示。
值得一提的是,由于该传感器中浮球与磁尺类似,所以该传感器能和磁尺配合使用。
这样,磁翻板就起到现场显示作用,而磁尺则起到变送远传的功能。
而且通过磁致伸缩原理将其转换成高精度的电信号,而且信号类型丰富。
而一般的远传变送器的原理是将开关信号转换为连续的模拟量的输出。
对于浮子和磁翻板两种传感器,在业对其两者的名称容易混淆,因为都是有一个磁性浮子,所以很多时候都被称之为磁浮子液位计,实际沟通时需要具体确认。
凡此两类传感器主要特点就是精度不高,同时由于磁性原理也需要在现场安装时注意一些干扰。
5. 电容式液位传感器原理:把一根涂有绝缘层的金属棒,插入装有导电介质的金属容器中,在金属棒和容器壁间形成电容,其物位变化量△H与电容变化量△CX关系如下:∆F F=5×F×F9FF(F2/F1)−F0式中:C0为容器液体放空时,金属棒对容器壁的分布电容ε为容器液体介电常数;H为液位高度;D2为绝缘套管的直径;F1为金属棒的直径当被测介质物位变化时,传感器电容量发生相应变化,电容量的变体∆F F 通过转换器转换成与物位成比例的直流标准信号。
此类传感器由于其原理决定,实际中根据被测介质的导电属性来选择各种不同的测量探头。
电容式原理的精度一般都能达到0.5%左右,测量围在0.2m--20m 之间。
由于电容原理的一些特殊性,相比磁尺来讲在稳定性方面还是有一定的距离。
6. 静压式液位传感器静压式液位计的两线制液位变送器由一个置毛细软管的特殊导气电缆、一个抗压接头和一个探头组成。
静压式液位计的探头构造是一个不锈钢筒芯,底部带有膜片,并由一个带孔的塑料外壳罩住。