小型无人机遥测遥控系统的方法研究
- 格式:doc
- 大小:26.50 KB
- 文档页数:7
如何使用无人机进行遥感测绘无人机的迅猛发展和日益普及,为遥感测绘带来了革命性的改变。
遥感测绘是指利用航空航天器等远距离的设备获取地面信息,并进行分析和解译。
而无人机的出现,不仅大大降低了测绘成本,还提高了数据的精度和时效性。
本文将探讨如何利用无人机进行遥感测绘的方法和应用。
一、无人机的基本原理无人机是指没有乘员操控的航空器。
它由飞行控制系统、传感器、通信系统和收发装置等组成。
其中,飞行控制系统是无人机最核心的部分,包括飞行控制计算机和传感器数据的处理与分析。
传感器包括相机、激光测距仪和热成像仪等,用于收集地面数据。
通信系统负责将数据传输到地面站。
二、无人机遥感测绘的步骤1. 飞行计划和路径规划:在进行遥感测绘前,需要制定详细的飞行计划和路径规划。
根据测绘区域的大小和特点,确定无人机的起飞点、飞行高度和飞行速度等参数。
同时,还需要考虑飞行时间和电池寿命等限制因素。
2. 数据采集:通过搭载的传感器,无人机可以获取高分辨率的空中影像、地形数据等。
相机用于拍摄地面影像,激光测距仪用于获取地面高程信息,热成像仪则可以检测地面温度等特征。
这些数据将被记录并传输到地面站进行进一步的处理。
3. 数据处理与分析:地面站负责对无人机采集到的数据进行处理和分析。
首先,需要对影像进行拼接和校正,以获得完整、准确的地面覆盖信息。
然后,通过图像处理算法可以提取各种特征,如建筑物、道路、植被覆盖等。
最后,可以利用地理信息系统(GIS)进行数据可视化和空间分析。
4. 数据应用:无人机遥感测绘的应用广泛。
在城市规划中,可以利用无人机获取的数据进行土地利用和土地覆盖的分析,为城市发展提供科学依据。
在农业领域,无人机可以监测农田的植被生长情况,实时掌握农作物的健康状况并进行精准施肥。
此外,无人机还可以用于环境监测、自然灾害评估和资源调查等方面。
三、无人机遥感测绘的优势和挑战1. 优势:(1)成本低:相比传统的航空遥感测绘,无人机遥感测绘更为经济实惠。
微型无人机智能控制技术研究一、引言随着科技的不断发展和进步,微型无人机已成为现代军事、农业、能源、运输、消费品等领域中的重要工具。
与传统的大型无人机相比,微型无人机具有体积小、重量轻、成本低等优势,能够适应更广泛的应用场景。
微型无人机智能控制技术是微型无人机技术的核心,可以使微型无人机具有更灵活的操作能力和更高效的性能表现。
本文将从控制算法、控制系统设计和控制器选择等方面对微型无人机智能控制技术进行研究分析。
二、控制算法微型无人机智能控制技术的核心是控制算法,主要包括模型建立、系统识别、控制器设计和控制器实现等方面。
在控制算法设计中,需要综合考虑微型无人机的物理特性、应用场景和用户需求等因素。
控制算法可以分为模型预测控制、自适应控制和模糊控制等几种类型。
在微型无人机的设计中,需要根据不同的应用场景和任务要求选择合适的控制算法。
例如,在精准测绘和智能巡航任务中,需要使用模型预测控制算法和滑模控制算法以实现微型无人机的快速响应和优秀的控制精度。
三、控制系统设计微型无人机的控制系统设计涉及硬件和软件两方面,主要包括传感器、执行器、计算机和控制器等部件。
在传感器的选择上,需要综合考虑微型无人机的运动状态、环境变化和目标检测等因素,选择适合的传感器以实现微型无人机的高精度控制。
在执行器的选择上,需要综合考虑微型无人机的控制精度、功耗效率和结构紧凑程度等因素,选择适合的执行器以实现微型无人机的快速响应和高效控制。
在计算机的选择上,需要综合考虑微型无人机的计算性能、存储容量和功耗等因素,选择适合的计算机以实现微型无人机的智能计算和控制。
在控制器的设计上,需要考虑微型无人机的控制稳定性、控制精度和控制速度等因素,选择适合的控制器以实现微型无人机的高效控制。
四、控制器选择在微型无人机的控制器选择中,需要综合考虑微型无人机的控制要求、性能指标和应用场景等因素,选择适合的控制器以实现微型无人机的高效控制。
常见的微型无人机控制器包括飞控、遥控器、智能手机和视觉传感器等。
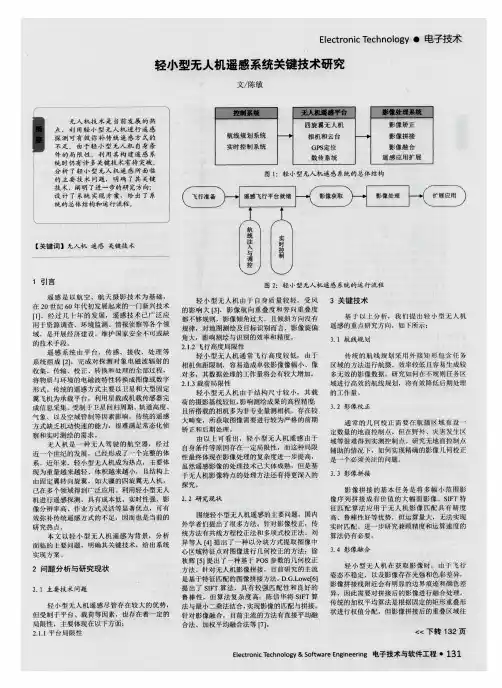
轻小型无人机遥感系统关键技术研究作者:陈敏来源:《电子技术与软件工程》2017年第10期无人机技术是当前发展的热点,利用轻小型无人机进行遥感探测可有效弥补传统遥感方式的不足。
由于轻小型无人机自身条件的局限性,利用其构建遥感系统时仍有许多关键技术有待突破。
分析了轻小型无人机遥感所面临的主要技术问题,明确了其关键技术,阐明了进一步的研究方向;设计了系统实现方案,给出了系统的总体结构和运行流程。
【关键词】无人机遥感关键技术1 引言遥感是以航空、航天摄影技术为基础,在20世纪60年代初发展起来的一门新兴技术[1]。
经过几十年的发展,遥感技术已广泛应用于资源调查、环境监测、情报侦察等各个领域,是开展经济建设、维护国家安全不可或缺的技术手段。
遥感系统由平台、传感、接收、处理等系统组成[2],完成对探测对象电磁波辐射的收集、传输、校正、转换和处理的全部过程,将物质与环境的电磁波特性转换成图像或数字形式。
传统的遥感方式主要以卫星和大型固定翼飞机为承载平台,利用星载或机载传感器完成信息采集。
受制于卫星回归周期、轨道高度、气象、以及空域管制等因素影响,传统的遥感方式缺乏机动快速的能力,很难满足常态化侦察和实时测绘的需求。
无人机是一种无人驾驶的航空器,经过近一个世纪的发展,已经形成了一个完整的体系。
近年来,轻小型无人机成为热点,主要体现为重量越来越轻、体积越来越小,且结构上由固定翼转向旋翼,如大疆的四旋翼无人机,已在多个领域得到广泛应用。
利用轻小型无人机进行遥感探测,具有成本低、实时性强、影像分辨率高、作业方式灵活等显著优点,可有效弥补传统遥感方式的不足,因而也是当前的研究热点。
本文以轻小型无人机遥感为背景,分析面临的主要问题,明确其关键技术,给出系统实现方案。
2 问题分析与研究现状2.1 主要技术问题轻小型无人机遥感尽管存在较大的优势,但受制于平台、载荷等因素,也存在着一定的局限性,主要体现在以下方面:2.1.1 平台局限性轻小型无人机由于自身质量较轻,受风的影响大[3],影像航向重叠度和旁向重叠度都不够规则,影像倾角过大,且倾斜方向没有规律,对地图测绘及目标识别而言,影像旋偏角大,影响测绘与识别的效率和精度。
19科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 信 息 技 术作战无人机的关键技术包括高速、高机动性能和武器挂载,以及与有人机一同执行任务时的控制和指挥能力。
无人机在执行飞行任务时,由地面站人员发出遥控指令加以控制,使之完成相应的任务,实现预期的目的,将一定距离以外被测对象的参数,经过采集,通过传输介质送到地面接收站并进行解调、记录、处理的过程,就是通过遥测遥控系统来实现的,可以说,遥测遥控系统是无人机的决策部分。
1 无人机遥测系统无人机遥测系统是以现代信息技术为基础的应用系统,是无人机系统中的重要组成部分。
1.1遥测系统的工作原理在发送端,待测参数通过传感器转换成电信号,通过信号解调器转换成适合采集的信号,通过多路复用装置按一定体制集合在一起,再由发射机的载波,经功率放大后通过天线发向信号接收端。
在接收端,当天线接收到信号后发送到接收机,经过多路复用解调器恢复出原始信号,经过记录分系统、数据处理分系统和显示分系统的处理后,对全部遥测信号进行记录,以便以后使用。
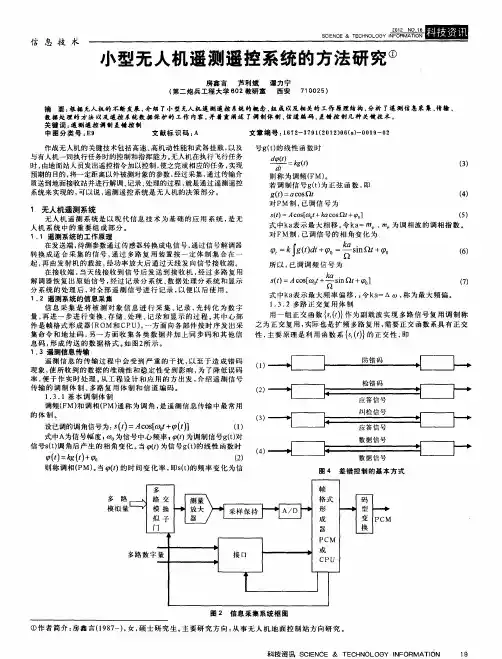
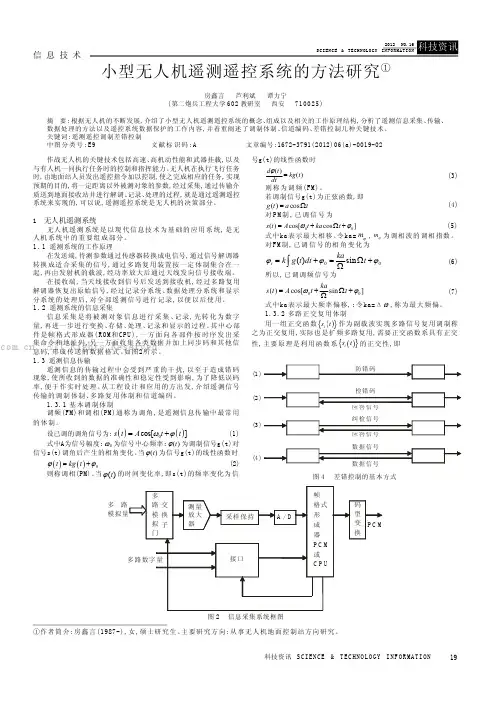
1.2遥测系统的信息采集信息采集是将被测对象信息进行采集、记录,先转化为数字量,再进一步进行变换、存储、处理、记录和显示的过程。
其中心部件是帧格式形成器(RO M和CPU ),一方面向各部件按时序发出采集命令和地址码,另一方面收集各类数据并加上同步码和其他信息码,形成传送的数据格式。
如图2所示。
1.3遥测信息传输遥测信息的传输过程中会受到严重的干扰,以至于造成错码现象,使所收到的数据的准确性和稳定性受到影响,为了降低误码率,便于作实时处理。
从工程设计和应用的方出发,介绍遥测信号传输的调制体制、多路复用体制和信道编码。
1.3.1基本调制体制调频(FM)和调相(PM)通称为调角,是遥测信息传输中最常用的体制。
设已调的调角信号为:0cos[]s t A t t (1)式中A为信号幅度; 0 为信号中心频率; ()t 为调制信号g(t)对信号s(t)调角后产生的相角变化。
微型无人机控制系统的设计与实现随着科技的不断进步,无人机的运用越来越广泛,其中微型无人机的应用更是愈发多样化。
微型无人机的优点在于体积小、重量轻,可以轻松进行控制和操控。
本文将介绍微型无人机的控制系统设计与实现。
一、传感器无人机的控制系统离不开传感器,传感器可以获取无人机周围环境的信息,并将其转化为数字信号。
对于微型无人机来说,传感器的选择对于后续的控制有着至关重要的作用。
以下是一些适合微型无人机的传感器:1.加速度计加速度计可以检测微型无人机在三维空间内的运动状态,包括速度、加速度等信息。
可以用于高精度的定位和位姿控制。
2.陀螺仪陀螺仪可以检测微型无人机的角速度,可以用于控制无人机的方向和姿态。
3.气压计气压计可以检测微型无人机的高度,可以用于高度控制和定高。
4.磁罗盘磁罗盘可以检测微型无人机与地球磁场的角度,可以用于地面定位和导航。
二、控制器控制器是无人机控制系统的核心部件,它接收传感器获取的数据,并进行计算和决策,控制无人机的飞行姿态和航向。
在微型无人机中,由于空间的限制,需要选择更小巧、更高效、更灵活的控制器。
以下是常用的微型无人机控制器:1.飞行控制器飞行控制器是无人机控制系统的核心,一般集成了多种传感器和控制器,可以通过USB接口连接计算机进行调参和升级。
其中,较为常见的控制器包括Naze32、CC3D、APM等。
2.遥控接收机遥控接收机是无人机控制系统的重要组成部分,可以通过信号接收器将遥控器发送的信号转化为数字信号,进而通过控制器进行控制。
相比于飞行控制器,遥控接收机尺寸更小,适合于微型无人机的控制。
三、电机驱动器电机驱动器是控制无人机电机的关键部件,能够将采集的数据转化为电流输出,从而控制无人机的飞行姿态。
针对微型无人机,需要选择轻量化、高效率、高频率的驱动器。
以下是常用的微型无人机电机驱动器:1.电调电调是微型无人机的核心驱动器,相当于电机的“变速器”,可以调整电机的转速和转向。
无人机遥控遥测系统关键性指标的测试的开题报告一、研究背景无人机已经成为如今很多领域中的重要工具。
但是,无人机本身的运行是需要遥控遥测系统的支持的。
因此,无人机遥控遥测系统的功能性表现是非常关键的。
对于无人机的性能评估和控制,必须要通过测试这些关键性指标,才能确保其可以安全、稳定地在各种应用场景中运行。
二、研究目的本研究旨在开发一种用于测试无人机遥控遥测系统关键性指标的测试平台,以便实现无人机系统的准确、可靠、高效和稳定的控制和遥测。
三、研究内容和方法1. 研究内容本研究主要考虑以下几个方面:- 分析无人机遥控遥测系统中的关键性指标,并评估其重要性和影响因素。
- 开发一套测试平台,以模拟不同的无人机场景,并且可以测量各种关键性指标。
- 性能测试无人机遥控遥测系统的各种指标,比如:信号传输速度、遥控距离、遥控延迟等,并记录测试数据。
- 通过测试结果进行数据分析,找出无人机遥控遥测系统中存在的问题,提出相关的解决方案,并进行改进。
2. 研究方法本研究将采用以下方法:- 通过文献综述和专家咨询来确定测试的关键性指标和重要的影响因素。
- 开发一套测试平台,该平台包括多个测试场景,如线性运动、旋转运动、向上和向下运动等场景,并引入多个传感器用于数据记录和分析。
- 测试无人机遥控遥测系统各项指标,并在测试完成后使用数据分析工具分析数据。
- 根据分析结果,提出问题和相关的解决方案,并对系统进行改进,保证系统的稳定性和性能。
四、预期成果本研究的预期成果如下:- 确定无人机遥控遥测系统中的关键性指标和重要影响因素。
- 开发一套多场景测试平台,并可以通过各种测试场景测试无人机遥控遥测系统的各种指标。
- 对无人机遥控遥测系统中存在的问题进行诊断,并提出相关的改进措施。
- 提供有效的测试数据和分析结果,以便进行系统设计、开发和维护。
五、研究计划和进度安排本研究计划分为以下几个阶段:- 第一阶段:文献综述和专家咨询,确定测试关键性指标和重要性因素,并确定测试平台的主要开发方向和技术路线。
微小型无人机的设计与控制技术研究随着科技的不断进步,无人机已经成为现代社会中不可或缺的重要工具。
而在众多类型的无人机中,微小型无人机更是成为了近年来科技界探究的热点之一。
微小型无人机具有体积小、重量轻、操控灵活等特点,能够便捷地进入人们难以到达的区域,为人们提供更为全面的监测与记录服务。
本篇文章将从微小型无人机的设计与控制技术入手,探讨其相关内容。
一、微小型无人机的设计方法微小型无人机的设计,需要先了解其基本构造和工作原理。
一般而言,微小型无人机由机身、电机、电子速度控制器(ESC)、飞行控制器(FC)、无线通信模块、电池等组成。
机身:机身为微型无人机的基本骨架,需使用轻质但坚韧的材质,如碳纤维或玻璃纤维等。
电机:由于微小型无人机的载重能力有限,需要使用小型的无刷电机,能够提供足够的动力以支撑飞行。
ESC:电子速度控制器是无人机中至关重要的组件之一,可控制电机的转速,保证飞行稳定。
FC:飞行控制器是微小型无人机的“大脑”,负责控制飞行姿态、调整航向、实现自主导航等功能。
无线通信模块:无人机需要与地面端进行通信,实现操作与信息传输等功能,需使用具有较远传输距离和稳定性的无线通信模块。
电池:电池是供能的重要组成部分,因此需要选择高性能的锂电池以确保长时间的无人机飞行。
以上是微小型无人机的基本构成部分,接下来将探讨微小型无人机的设计方法。
1、设计流程微小型无人机的设计流程分为以下步骤:(1)确定无人机类型:根据使用需求和目的,选择对应的无人机类型。
(2)挑选核心器材:根据无人机类型和设计要求,选择合适的机身、电机、ESC、FC等核心器材。
(3)进行装配:按照机身设计图纸完成装配工作,设置航向控制板、领航仪、GPS等。
(4)测试与调整:进行无人机马达相对呼叫器的调整和校准。
(5)进行测试飞行:完成测试和校准后,进行实际测试飞行,记录数据并进行数据分析。
(6)产品制作:在满足设计要求与性能的前提下,生产出符合要求的微小型无人机。
民用轻小型固定翼无人机系统试验方法一、引言近年来,随着无人机技术的快速发展和民用无人机市场的不断扩大,民用轻小型固定翼无人机系统的应用也日益广泛。
在进行无人机系统试验时,合理的试验方法能够有效提高试验效率和安全性,保障试验数据的准确性和可靠性。
本文旨在探讨民用轻小型固定翼无人机系统的试验方法,为相关领域的研究和实践提供参考。
二、试验前准备1. 确定试验需求:在进行试验前,需要明确所要测试的无人机系统的性能指标和试验目标,包括但不限于飞行性能、导航控制、遥控通信、环境适应等。
并根据不同的试验需求,选择相应的试验方法和方案。
2. 设立试验场地:选取符合试验要求的适当场地进行试验,确保场地空旷、安全,符合无人机系统试验的要求,同时需要获得相关权限和许可证。
3. 检查设备和工具:在试验前需对试验所用的无人机系统、地面控制站、测量设备、通信设备等进行全面检查和维护,确保各项设备的正常工作状态。
4. 制定应急预案:应在试验前制定相应的应急预案,包括但不限于无人机失控、通信故障、飞行器损毁等突发情况的处理措施和应急联系方式,确保试验过程中的安全。
三、试验方法1. 静态试验:通过地面测试台对无人机系统的电路、传感器、执行器等部件进行检测和调试,以确认其基本功能的正常运行,并对其工作稳定性进行评估。
2. 动态试验:在开阔的场地进行无人机系统的飞行性能试验,包括升降、转弯、滑行、失速速度、爬升度等性能参数的测试,以评估无人机的飞行性能与稳定性。
3. 通信试验:测试控制指令的无线传输性能和稳定性,包括信号覆盖范围、传输距离、信号干扰等指标,以确认通信系统的可靠性。
4. 遥控试验:测试遥控器与无人机系统的配合性和灵敏度,包括控制指令的传输速度、响应时间等指标,以评估遥控通信系统的稳定性。
5. 环境适应试验:在不同的自然环境条件下,如高温、低温、高海拔、强风等环境下对无人机系统进行测试,以评估其在复杂环境下的适应能力。
四、试验数据处理与分析1. 数据采集:在试验过程中,需要利用各类传感器和测试仪器对无人机系统的各项性能参数进行实时数据采集,包括飞行状态、姿态角、速度、高度、通信信号质量等。
微小型无人机飞行控制系统的设计与实现摘要:为了分析无人机工作的实际特点,我们针对现阶段的微小型无人机飞行控制系统进行了细致化的研究,针对性的设计出了一套微笑无人机的自动飞行控制管理系统。
这项技术的研究,将无人机与各个自动控制系统之间的功能实现了串联,实现了数字化系统管理模式的优化。
本文通过建立起微小型无人机飞行控制系统的数字化模型,设计了无人机姿态保持以及轨迹控制管理基础规律,通过仿真实践结果分析观察可知,设计的控制效果达到了较为稳定的无人机操作运行功能要求,满足了整个系统工作的设计构思,是现阶段推动微小型无人机飞行控制系统构建的主要措施手段。
关键词:微小无人机;飞控软件;设计无人机近年来在我国的发展速度较快,可以有效地执行多种任务,在军用和民用领域都发挥这种积极地作用。
尤其小型无人机可以实现战术侦察、目标指示、精准投放、战果评估、探测分析、环境监控、人员搜救、通信中继等工作任务。
与有人驾驶的飞机之间进行比较,这种设备的工作除却储存量小、重量轻、速度快的优势之外,本身的机动性效果较好,能够满足各种工作需求,也能完成各项飞控工作的信号传输,满足系统设计的各种需求。
一、微小型无人机飞行控制系统的建模通过对系统进行综合分析,人们通过对微小型无人机飞行控制系统的模型构建,将具体问题系统化,通过数学模型进行分析,再利用计算机仿真实践的措施手段对相关的设计方案进行印证。
1、无人机坐标系的构建要对无人机实现建模,坐标系构建必不可少。
坐标系的构建是一切系统的参考依据,无人机之中的参数信息也是在坐标系之中构建的。
由于作用在无人机上的重力、空气动力以及外部动力等原因各有不同,因此在进行无人机坐标系构架的过程中需要不同的坐标系对整个无人机空间运作的状态进行确定和描述。
选择适当的坐标系完成数据参数的表示行为边界。
例如选择地面坐标系可以实现重力分析比较分析,集体坐标系可以实现发动机推力的比较分析,而空气动力则是在流动气流坐标系之中可以实现便捷的分析。
无人机遥感技术的研究及应用随着科技的快速发展,无人机遥感技术也越来越成熟,被广泛应用于农业、林业、环境、地质、建设等领域。
无人机遥感技术依靠高分辨率影像、精准定位、数据可视化等手段,可以快速、高效地获取目标地区的地表信息。
一、无人机遥感技术的基础原理无人机遥感技术依靠搭载在无人机上的各种传感器,通过获取地表的高分辨率影像和其他数据,来获取目标地区的地表信息。
这些传感器包括高精度光学相机、激光雷达、多光谱相机、超高分辨率星载遥感传感器等。
通过这些传感器,可以实现全天候、全天时、高精度的地表数据获取和处理,为后续的数据分析和应用提供了可靠的数据支持。
二、无人机遥感技术的应用领域1.农业领域:无人机遥感技术可以快速获取农作物的生长状况、土地利用情况等信息,为农业生产提供精准化管理和决策支持。
例如,可以使用无人机遥感技术获取农作物的生长情况和叶片颜色等信息,来判断农作物的健康程度和生长状态,为精准施肥、喷药提供依据。
2.林业领域:无人机遥感技术可以快速获取森林的覆盖情况、树种、树高、杂草覆盖等信息,为林业生产提供科学的管理决策。
例如,可以使用无人机遥感技术获取森林的覆盖情况和杂草覆盖等信息,来制定杂草清除计划,提高树木生长的空间和养分的竞争能力,来提高林木的产量和质量。
3.环境领域:无人机遥感技术可以快速获取城市中的空气、水质、土壤等环境的数据信息,为环保监测提供科学的依据。
例如,可以使用无人机遥感技术获取城市空气颗粒物的浓度和颗粒物大小等信息,来判断城市的空气质量和污染程度,从而采取针对性的环保措施。
4.地质领域:无人机遥感技术可以快速获取某些地区的地形、地貌、地质、水文等方面的数据,为灾害预警、地质勘探和资源开发提供可靠的数据支持。
例如,可以使用无人机遥感技术获取山体的形态和动态变化等信息,来判断山体的稳定性和风险等级,为地质勘探和灾害预警提供数据依据。
5.建设领域:无人机遥感技术可以快速获取建筑物的高度、面积、体积等各种信息,为建筑施工和工程管理提供数据支持。
第30卷增刊2008年10月探测与控制学报Journal of Detection &ControlVol 130SupplementOct 12008*收稿日期:2008-04-11作者简介:赵修明(1962-),男,河南宁陵人,本科,研究方向:军用航模靶机使用。
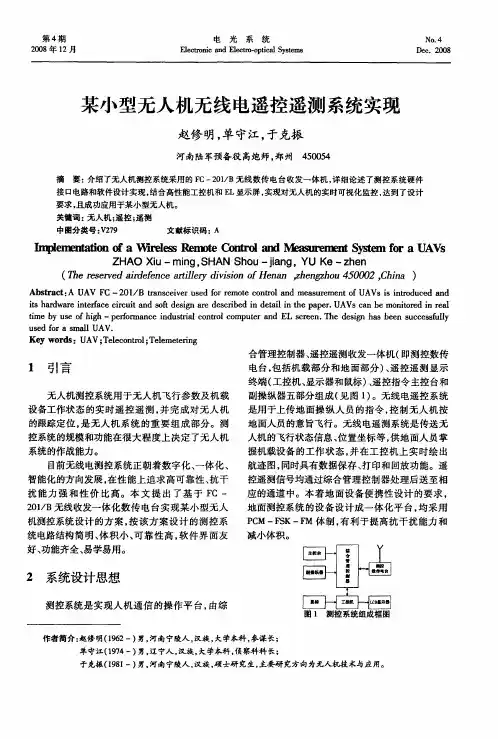
某小型无人机无线电遥控遥测系统实现赵修明,单守江,于克振(河南陆军预备役高炮师,河南郑州 450002)摘 要:无线电遥控遥测系统是无人机的重要组成部分,介绍了无人机测控系统采用的FC -201/B 无线数传电台收发一体机,详细论述了测控系统硬件接口电路和软件设计实现,结合高性能工控机和EL 显示屏,实现对无人机的实时可视化监控,达到了设计要求,且成功应用于某小型无人机。
关键词:无人机;遥控;遥测中图分类号:TN99 文献标志码:A 文章编号:1008-1194(2008)S0-0094-04A UAV Wireless Telecontrol and Telemetering S ystem RealizationZHAO Xiu -ming,SHAN Shou -jiang,YU Ke -zhen(T he Reserv e Antiaircraft Ar tiller y Divisio n o f He -nan,Zheng zho u 450002,China)Abstract:W ireless teleco nt rol and telemeter ing sy stem is an im po rtant par t of U A V.T his paper intr oduces t heFC -201/B t ransm itter -r eceiver set of t elemetry contr ol system employ s,ex plicates interface circuit o f har dw are and soft desig ning in detail.T hus it can carr y out the U A V 's super visio n in real t ime by the combination of high -perfor mance industr ial co nt rol computer and EL scr een.T he desig ning request is im plemented and it is success -fully used in one sma ll U AV.Key words:U A V ;teleco ntr ol;telemet ering0 引言无线电遥控遥测系统简称为测控系统,传统的无人机测控系统通过高频头实现数据的接收和发射,且收发设备分离,系统复杂、稳定性可靠性差;数据终端显示迟后,数据更新率慢,难以满足小型无人机测控系统的需求。
无人机的遥测遥控技术在远程操控中的应用研究研究方案无人机的遥测遥控技术在远程操控中的应用研究一、研究背景和意义近年来,无人机的应用逐渐扩展到各个领域,如农业、物流、环境监测等。
然而,传统的遥测遥控技术在远程操控中存在许多局限性,如信号传输延迟、操作不便等。
本研究旨在探索新的无人机遥测遥控技术,在提高操控效果的解决远程操控中的实际问题。
二、研究目标1. 分析无人机遥测遥控技术的当前状况和存在的问题;2. 提出新的无人机遥测遥控技术的研究方向;3. 设计并实施一套高效可行的无人机遥测遥控系统;4. 采集相关数据并进行整理和分析;5. 提出新的观点和方法,为解决实际问题提供参考。
三、研究内容和方法1. 研究无人机遥测遥控技术的当前状况和存在问题。
通过查阅文献、调研市场和技术情况,对无人机遥测遥控技术的发展状况进行分析,总结目前存在的问题和局限性。
2. 提出新的无人机遥测遥控技术的研究方向。
在分析当前状况和问题的基础上,提出新的研究方向和解决思路,如利用新的通信技术提高遥测遥控的实时性和可靠性,使用先进的图像识别和处理算法提高操控的精准度等。
3. 设计并实施一套高效可行的无人机遥测遥控系统。
根据提出的研究方向和解决思路,设计并实施一套高效可行的无人机遥测遥控系统。
系统包括硬件和软件两部分,硬件部分包括无人机、传感器、通信设备等,软件部分包括远程操控软件、数据采集和处理软件等。
4. 采集相关数据并进行整理和分析。
在实验或调查中,通过对无人机的操控过程进行数据采集,采集相关参数和指标,如信号延迟、响应时间等。
将采集到的数据进行整理和分析,评估设计的无人机遥测遥控系统的性能和效果。
5. 提出新的观点和方法。
在已有研究成果的基础上,针对分析和实验结果,提出新的观点和方法,对现有的问题进行改进和创新,为解决实际问题提供有价值的参考。
四、方案实施1. 设计和搭建实验平台。
根据研究内容和目标,选择合适的无人机平台、传感器和通信设备,并进行组装和调试,搭建一个完整的实验平台。
无人机测绘操控技术的方法与技巧讲解随着科技的不断发展,无人机测绘技术在各个领域中得到了广泛的应用。
无人机测绘操控技术的方法与技巧的掌握,对于无人机的高效运行和数据采集至关重要。
本文将从无人机的选择、飞行计划制定、操控技巧等方面进行讲解。
首先,选择一款适合的无人机是成功进行测绘的基础。
根据测绘任务的需求,选择具备较长续航时间、稳定飞行性能以及高分辨率相机的无人机。
此外,无人机的遥控器操控系统也需要易于操作和稳定可靠,以确保飞行的安全性。
其次,制定详细的飞行计划是无人机测绘的关键。
在进行测绘任务前,需要详细了解测绘区域的地理环境和任务要求。
根据这些信息,制定飞行计划,包括起飞点、航线规划、飞行高度、飞行速度等。
同时,还需要考虑飞行时间和天气等因素,确保飞行的安全和数据的准确性。
在飞行过程中,掌握一些操控技巧可以提高无人机的飞行效果。
首先,熟悉遥控器的操作方式和功能。
了解每个按钮和摇杆的作用,熟练掌握姿态控制、高度控制和方向控制等基本操作。
其次,掌握飞行模式的切换和飞行参数的调整。
根据实际需求,选择合适的飞行模式,如手动模式、自动模式或者半自动模式,并根据需要调整飞行参数,如飞行高度、飞行速度等。
此外,注意飞行过程中的姿态调整,保持无人机的稳定飞行状态。
在测绘任务结束后,及时对采集的数据进行处理和分析,以获取有用的测绘结果。
根据任务需求,选择合适的数据处理软件,如Pix4D、DroneDeploy等。
将采集到的图像进行拼接和处理,生成高精度的地图或三维模型。
同时,对数据进行分析,提取出有用的信息,如地形变化、植被覆盖等,为后续的决策提供支持。
总之,无人机测绘操控技术的方法与技巧的掌握对于无人机测绘任务的成功实施至关重要。
选择适合的无人机、制定详细的飞行计划、掌握操控技巧以及及时处理和分析采集的数据,都是保证测绘任务顺利完成的关键步骤。
随着无人机技术的不断发展,相信无人机测绘操控技术将会越来越成熟,为各行各业带来更多的便利和发展机遇。
小型无人机遥测遥控系统的方法研究
摘要:根据无人机的不断发展,介绍了小型无人机遥测遥控系统的概念、组成以及相关的工作原理结构,分析了遥测信息采集、传输、数据处理的方法以及遥控系统数据保护的工作内容,并着重阐述了调制体制、信道编码、差错控制几种关键技术。
关键词:遥测遥控调制差错控制
1前言
作战无人机的关键技术包括高速、高机动性能和武器挂载,以及与有人机一同执行任务时的控制和指挥能力。
无人机在执行飞行任务时,由地面站人员发出遥控指令加以控制,使之完成相应的任务,实现预期的目的,将一定距离以外被测对象的参数,经过采集,通过传输介质送到地面接收站并进行解调、记录、处理的过程,就是通过遥测遥控系统来实现的,可以说,遥测遥控系统是无人机的决策部分。
2无人机遥测系统
无人机遥测系统是以现代信息技术为基础的应用系统,是无人机系统中的重要组成部分。
2.1遥测系统的工作原理
在发送端,待测参数通过传感器转换成电信号,通过信号解调器
转换成适合采集的信号,通过多路复用装置按一定体制集合在一起,再由发射机的载波,经功率放大后通过天线发向信号接收端。
在接收端,当天线接收到信号后发送到接收机,经过多路复用解调器恢复出原始信号,经过记录分系统、数据处理分系统和显示分系统的处理后,对全部遥测信号进行记录,以便以后使用.
2.2遥测系统的信息采集
信息采集是将被测对象信息进行采集、记录,先转化为数字量,再进一步进行变换、存储、处理、记录和显示的过程。
其中心部件是帧格式形成器(ROM和CPU),一方面向各部件按时序发出采集命令和地址码,另一方面收集各类数据并加上同步码和其他信息码,形成传送的数据格式。
如图2所示:
2.3遥测信息传输
遥测信息的传输过程中会受到严重的干扰,以至于造成错码现象,使所收到的数据的准确性和稳定性受到影响,为了降低误码率,便于作实时处理。
从工程设计和应用的方出发,介绍遥测信号传输的调制体制、多路复用体制和信道编码。
2.3.1 基本调制体制
调频(FM)和调相(PM)通称为调角,是遥测信息传输中最常用的体制。
2.4 遥测信息数据处理
遥测信息数据处理是将地面控制站接收到的原始信息,经过挑选、拼接和运算,完成缓变参数的时间指令处理、变速参数的时域和频域等项处理工作。
遥测参数分为缓变和速变参数,相应的方法也是不同的。
缓变参数在处理之前要对记录数据的质量进行检查,检查内容是记录介质所记内容是否完整、清楚,信号是否正常,查清跳点和信号散乱段的时间。
质量检查后需进行预处理,再进行计算。
速变参数在处理的时候也需要对记录数据进行检查、加工,然后进行处理。
但相应的内容与缓变参数的处理不一样,相比之下,速变的方法更为复杂,工作量更大。
3 无人机遥控系统
遥控系统是在控制端发出指令,利用有线或无线电信道将其发送到执行端,使无人机完成预定的工作。
遥控站监测系统是地面站的管理和监控中心,有监控台、检测接收机、检测解调器等组成,对地面站系统各分机进行监控、检测,地面站PC机通过远程监控系统完成指令数据的发送以及对重要工作和参数进行记录。
飞行回放数据,航点和航线数据采用文本格式存储,数据格式简单、冗余量小,可以直接用记事本编辑。
3.1 遥控系统工作原理
地面遥控系统包括监控台、指令编码器、副载波调制器、载波调制器、发射天线、地面检测接收机等基本设备和辅助设备。
地面遥控系统在监控台、PC机、引导设备和外部接口设备等的支持下,完成对无人机的目标跟踪和遥控指令的产生与控制。
遥控指令和数据的形成在实施控制前一般要制定好,遥控计划在无人机经过地面站上空前送往相应的监控站,当无人机进入地面站的覆盖区时,必须由地面人员发出遥控指令加以控制,使之做出各种动作,完成既定任务,实现预期目的。
3.2 遥控系统差错控制技术
由于外部干扰和系统内部的不稳定,任何传输手段都存在一定的
错误概率。
遥控传输信道本身能达到的码元误码率一般为,而无人机遥控指令的误码率要求在以下[8],这样除了采用较好的调制解调方法外,也要降低相应的错误概率。
差错控制是根据待传数据序列,以一定规律产生一些多余码元,使原来不相关的数据序列变为相关编码,并把多余码和信息一起传送,接收端根据信息元和多余码之间的规则进行检验,从而发现错误进行更正。
差错控制有两种形式,一种是发现消息有错误后自动纠正;另一种是发现错误后,通过反馈,要求重发,从而进行纠错。
如图4所示:
4差错控制的基本方式
检错重发体制随着指令码距的增加,使错误指令概率下降,由于无人机遥控系统基本不变,只要地面站系统多次重发,无人机接收端只要接收一次可用码就能执行,这样就演变成了重发检测体制。
3.3 遥控数据保护
遥控信息的安全是无人机遥控系统设计和任务实施过程中最重
要的问题,在日益发展的电子侦察和电子对抗技术中,遥控信息的传输经过空间链路具有开放性,使遥控信息面临更为复杂的环境,面对更多的威胁,更应利用数据技术提高安全性。
在我国国家军用标准GJB1198.1-91《卫星测控和数据管理PCM遥控》中规定,在PCM遥控中使用实时开关指令帧和串行数据注入帧两种遥控帧,在其后面可以附加一个长度为8m(m=1,2,3...)比特的序列,用于数据保护。
如图5所示:
地址同步字方式字指令码数字签名序列(a)
地址同步字方式字注入数据CRC(可选)结束字数字签名序列(b)
4 结语
无线电遥测系统是传送无人机和地面站的状态参数,可实现飞机姿态、高度、速度、航向、方位、及机上各种数据的测量和实时显示,具有数据和图形的显示功能,供地面人员掌握无人机和遥感设备的有
关信息,并存贮所有传送信息,以便随时调用复查。
无线电遥控系统是用于传输地面操纵人员的指令,利用软硬件结合的方法有效地解决了指令编码的产生、调制、故障处理以及数据保护的问题,采集飞机的飞行姿态、地理坐标、发动机的运行状态参数,接收及发送遥测信号;同时还要实现各种模式的飞行控制、自主导航、任务设备的控制与管理等,抗干扰性能好,误码率低,稳定可靠,可引导无人机按地面人员的旨意飞行。
参考文献
[1]冯密荣,毛泽孝,刘志红,吴邵华等.世界无人机大全[M].航空工业出版社,2004.10
[2]刘蕴才,姚奇松,房鸿瑞.遥测遥控系统(下册)[M].北京.国防工业出版社,2000,4.
[3]李明鸿,吴连振.无人机地面站雷达遥测信号实时数据采集系统J].测绘技术,1989,10(4)。