点的合成运动习题解答
- 格式:docx
- 大小:396.92 KB
- 文档页数:12
第五章抛体运动习题课:运动的合成与分解的两个模型课后篇巩固提升合格考达标练1.某小船船头垂直于河岸渡河,若水流速度突然增大,其他条件不变,下列判断正确的是()A.小船渡河的时间不变B.小船渡河的时间减少C.小船渡河的时间增加D.小船到达对岸的地点不变,与水速大小无关,选项v,河宽为d,则渡河时间t=dvA正确,B、C错误;由于水速增大,故合速度的方向变化,到达河对岸的地点变化,选项D错误。
2.(2021山东烟台高一期中)光滑半球A放在竖直面光滑的墙角处,用手推着保持静止。
现在A与墙壁之间放入光滑球B,放手让A和B由静止开始运动,当A、B运动到图示位置时,二者球心的连线与水平面成θ角,速度大小分别为v A和v B,则以下关系正确的是()A.v A=v BB.v A=v B sin θC.v A=v B cos θD.v A=v B tan θ,所以两球沿球心连线方向的分速度大小相等,即v A cos θ=v B sin θ,得v A=v B tan θ,故D正确。
3.(多选)如图所示,一人以恒定速度v 0通过定滑轮竖直向下拉小车,使其在水平面上运动,当运动到如图位置时,细绳与水平方向成60°,则此时 ( )A.小车运动的速度为12v 0 B.小车运动的速度为2v 0 C.小车在水平面上做加速运动 D.小车在水平面上做减速运动,如图。
人拉绳的速度与小车沿绳子方向的分速度是相等的,根据三角函数关系:v cos 60°=v 0,则v=vcos60°=2v 0,随小车向左运动,细绳与水平方向的夹角α越来越大,由v=v0cosα知v 越来越大,则小车在水平面上做加速运动,故B 、C 正确。
4.(2021河南焦作期末)不可伸长的轻绳通过定滑轮,两端分别与甲、乙两物体连接,两物体分别套在水平、竖直杆上。
控制乙物体以v=2 m/s 的速度由C 点匀速向下运动到D 点,同时甲由A 点向右运动到B 点,四个位置绳子与杆的夹角分别如图所示,绳子一直绷直。
重修班静力学复习题一、 是非判断题(10分)1.若两个力的力矢量相等,12F F =r r ,则两个力等效。
(×) (若两个力偶的力偶矩矢相等,12M M =r r,则两个力偶等效)(√)2.根据力的可传性原理,可以将构架ABC 上的作用在AB 杆的力F 移至AC 杆图示位置。
2. 图中圆盘处于平衡状态,说明力偶M 与力F 等效。
(×)3. 空间中三个力构成一平衡力系,此三力必共面。
(√)4. 空间任意力系向某一点O 简化,主矢为零,则主矩与简化中心无关。
(√)5. 空间任意力系总可以用二个力来平衡。
(√)6. 力与轴共面则力对轴的矩为零。
(√)7. 空间平行力系不可能简化为力螺旋。
(√) 二 选择题(15分)1不经计算,可直接判断出图示桁架结构的零杆数目为 C 个。
A 2; B 3;C 4;D 5期未试题A :(6分)图示简支桁架,已知力P 、Q ,长度a ,刚杆1,2,3的内力分别为=1T ( 0 ),=2T ( -P ),=3T ( 0 )。
期未试题B (6分) 图示悬臂桁架受到大小均为F 的三个力作用,则杆1内力大小为( 0),杆2内力大小为( -F ),杆3内力大小为( 0 )。
2 物块重力大小为5kN G =,与水平面间的摩擦角为020f ϕ=,今用与铅垂线成025角的力F 推动物块,若5kN F G ==,则物块 A 。
A 保持静止;B 处于临界状态;C 向右加速滑动;D 向右匀速滑动期未试题:2 物块重力大小为5kN G =,与水平面间的摩擦角为030f ϕ=,今用与铅垂线成050角的力F 推动物块,若5kN F G ==,则物块( A )。
补考试题:物块重力大小为5kN G =,与水平面间的摩擦角为030f ϕ=,今用与铅垂线成065角的力F 推动物块,若5kN FG ==,则物块( C )。
3在正方体的一个侧面,沿AB 方向作用一集中力F , 则该力对坐标轴的力矩大小为 D 。
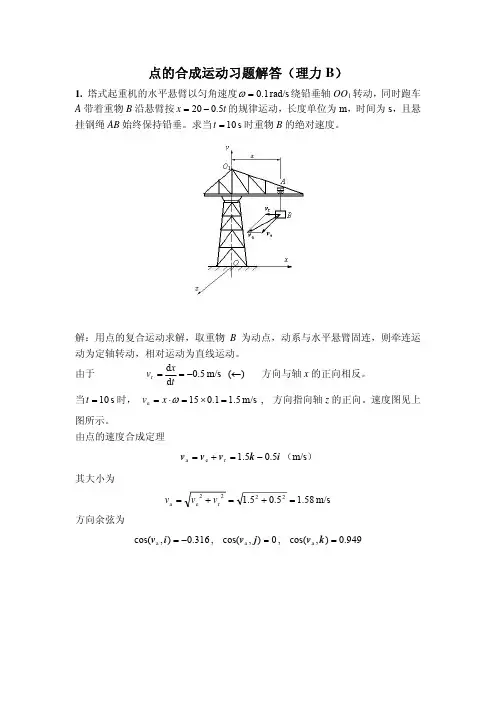
第 5 章点的合成运动习题解答0 8 08 1 4第五章点的合成运动本章要点一、绝对运动、相对运动和牵连运动一个动点,两个参照系:定系,动系;三种运动:绝对运动、相对运动和牵连运动,包括三种速度:绝对速度、相对速度和牵连速度;三种加速度:绝对加速度、相对加速度和牵连加速度;牵连点:动参考系上瞬时与动点相重合的那一点称为动参考系上的牵连点。
二、速度合成定理动点的绝对速度,等于它在该瞬时的牵连速度与相对速度的矢量和,即V a V e V r解题要领1定系一般总是取地面,相对定系运动的物体为动系,动点不能在动系上.2牵连速度是牵连点的速度•3速度合成定理中的三个速度向量,涉及大小方向共六个因素,能且只能存在两个未知数方能求解,因此,至少有一个速度向量的大小方向皆为已知的.4作速度平行四边形时,注意作图次序:一定要先画大小方向皆为已知的速度向量,然后再根据已知条件画上其余两个速度向量,特别注意,绝对速度处于平行四边形的对角线位置.5用解三角形的方法解速度合成图.三、加速度合成定理1牵连运动为平移时的加速度合成定理当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和,即a a a e a r ,当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成a;a a a e n t na e a r a r其中a;dv;,n aa2V a tdV e n,a e ,a e2Ve a t,a r dV r,a n2v■ ?a, e, r依次dt a dt e dt r为绝对轨迹、牵连轨迹和相对轨迹的曲率半径。
解题要领1牵连运动为平移时的加速度合成定理只对“牵连运动为平移时”成立,因此,判定牵连运动是否为平移至关重要.2牵连运动为平移时的加速度合成定理涉及的三个加速度,每一加速度都可能有切向和法向加速度。
但是,法向加速度只与速度有关,因此,可以通过速度分析予以求解,从而在此处是作为已知的。

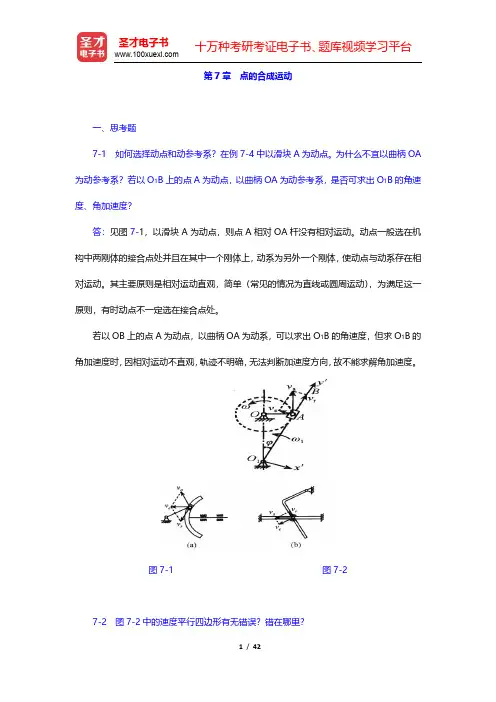
第八章 点的合成运动习题及解答P189 8-5. 已知 OA=l ,曲杆BCD 的速度为v ,BC=a; 求:A 点的速度与x 的关系。
解:取曲杆上的点B 为动点,OA 杆为动系,则r e a v v v +=v v a =,得22a e a x a .v s i n .v v +==φ ,a x a.v OB v 22e 0+==ω=A v .v l .0=ωl ,a x a .22+P190 8-7. 已知 两种机构中2m .0a O O 21==, 杆 A O 1的角速度1ω=3rad/s,030=θ;求:杆A O 2A O 1的角速度2ω.解: 图 (a) , 取杆A O 1上的A 点为动点,杆A O 2为动系,图 (b) , 取杆A O 2上的A 点为动点,杆A O 1为动系,由: r e av v v += 分别作速度矢量图。
由图 (a) 解出23a.cos30.v v 10a e ω==,,s /rad 5.12A O v 12e 2===ωω由图 (b) 解出32.a .cos30v v 10e a ω==, ,s /5r a d .12A O v 12e 2===ωω.s /rad 232A O v 12a 2===ωωP190 8-9. 已知 ==V v AB 常数,当t=0时,0=ϕ;求:045=ϕ时,点C 的速度的大小。
解: 取杆AB 上的A 点为动点,杆OC 为动系,由: r e av v v += 作速度矢量图。
ϕϕcos .v cos .v v a e ==,lcos .a OA OC .v v e c ϕ==解出 l a .c o svv 2c ϕ=,当045=ϕ时, 2l av v c =P190 8-10. 已知,轮C 半径为R ,偏心距OC=e, 角速度 ω=常数;求:00=ϕ时,平底杆AB 的速度。
解: 取轮心C 为动点,平底杆AB 为动系,由: r e av v v += 作速度矢量图。
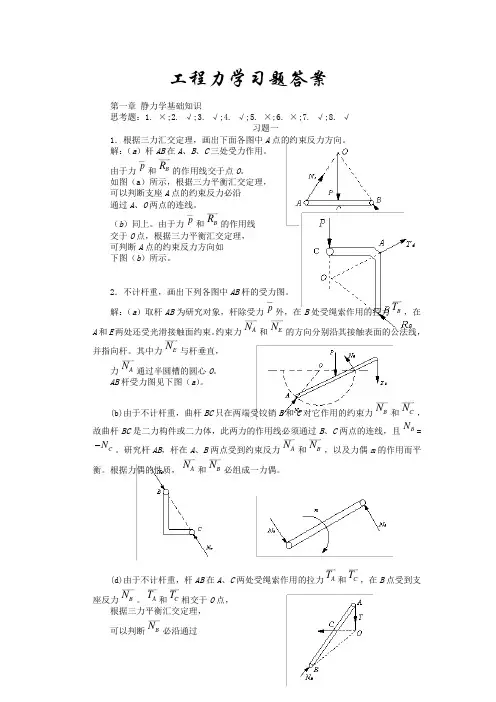
工程力学习题答案第一章 静力学基础知识思考题:1. ×;2. √;3. √;4. √;5. ×;6. ×;7. √;8. √习题一1.根据三力汇交定理,画出下面各图中A 点的约束反力方向。
解:(a )杆AB 在A 、B 、C 三处受力作用。
由于力和的作用线交于点O 。
如图(a )所示,根据三力平衡汇交定理, 可以判断支座A 点的约束反力必沿 通过A 、O 两点的连线。
(b )同上。
由于力和的作用线 交于O 点,根据三力平衡汇交定理, 可判断A 点的约束反力方向如 下图(b )所示。
2.不计杆重,画出下列各图中AB 杆的受力图。
解:(a )取杆AB 为研究对象,杆除受力外,在B 处受绳索作用的拉力,在A 和E 两处还受光滑接触面约束。
约束力和的方向分别沿其接触表面的公法线,并指向杆。
其中力与杆垂直,力通过半圆槽的圆心O 。
AB 杆受力图见下图(a )。
(b)由于不计杆重,曲杆BC 只在两端受铰销B 和C 对它作用的约束力和,故曲杆BC 是二力构件或二力体,此两力的作用线必须通过B 、C 两点的连线,且=。
研究杆AB ,杆在A 、B 两点受到约束反力和,以及力偶m 的作用而平衡。
根据力偶的性质,和必组成一力偶。
(d)由于不计杆重,杆AB 在A 、C 两处受绳索作用的拉力和,在B 点受到支座反力。
和相交于O 点,根据三力平衡汇交定理,可以判断必沿通过pB RpB Rp B T A N E N E N A N B N C N BN CN A N B N A N B N A T C T B N A T C TB NB、O两点的连线。
见图(d).第二章 力系的简化与平衡思考题:1. √;2. ×;3. ×;4. ×;5. √;6. ×;7. ×;8. ×;9. √.1. 平面力系由三个力和两个力偶组成,它们的大小和作用位置如图示,长度单位为cm ,求此力系向O 点简化的结果,并确定其合力位置。
第7章 点的合成运动一、是非题(正确的在括号内打“√”、错误的打“×”)1.点的速度和加速度合成定理建立了两个不同物体上两点之间的速度和加速度之间的 关系。
( √ ) 2.根据速度合成定理,动点的绝对速度一定大于其相对速度。
( × )3.应用速度合成定理,在选取动点和动系时,若动点是某刚体上的一点,则动系不可以固结在这个刚体上。
( √ )4.从地球上观察到的太阳轨迹与同时在月球上观察到的轨迹相同。
( × ) 5.在合成运动中,当牵连运动为转动时,科氏加速度一定不为零。
( × ) 6.科氏加速度是由于牵连运动改变了相对速度的方向而产生的加速度。
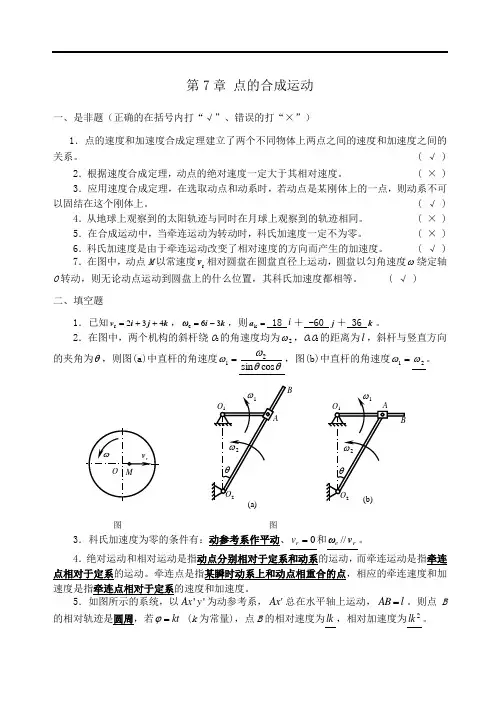
( √ ) 7.在图中,动点M 以常速度r v 相对圆盘在圆盘直径上运动,圆盘以匀角速度ω绕定轴O 转动,则无论动点运动到圆盘上的什么位置,其科氏加速度都相等。
( √ )二、填空题1.已知r 234=++v i j k ,e 63=-ωi k ,则k =a 18 i + -60 j + 36 k 。
2.在图中,两个机构的斜杆绕O 2的角速度均为2ω,O 1O 2的距离为l ,斜杆与竖直方向的夹角为θ,则图(a)中直杆的角速度=1ωθθωcos sin 2,图(b)中直杆的角速度=1ω2ω。
图 图3.科氏加速度为零的条件有:动参考系作平动、0=r v 和r e v ω//。
4.绝对运动和相对运动是指动点分别相对于定系和动系的运动,而牵连运动是指牵连点相对于定系的运动。
牵连点是指某瞬时动系上和动点相重合的点,相应的牵连速度和加速度是指牵连点相对于定系的速度和加速度。
5.如图所示的系统,以''Ax y 为动参考系,Ax'总在水平轴上运动,AB l =。
则点B 的相对轨迹是圆周,若kt ϕ= (k 为常量),点B 的相对速度为lk ,相对加速度为2lk 。
图6.当点的绝对运动轨迹和相对运动轨迹都是曲线时,牵连运动是直线平动时的加速度合成定理表达式是a e r =+a a a ;牵连运动是曲线平动时的加速度合成定理表达式是 a e r =+a a a ;牵连运动是转动时的加速度合成定理表达式是a e r k =++a a a a 。

第七章 点的合成运动一、是非题7.1.1动点的相对运动为直线运动,牵连运动为直线平动时,动点的绝对运动必为直线运动。
( )7.1.2无论牵连运动为何种运动,点的速度合成定理r e a v v v +=都成立。
( ) 7.1.3某瞬时动点的绝对速度为零,则动点的相对速度和牵连速度也一定为零。
( ) 7.1.4当牵连运动为平动时,牵连加速度等于牵连速度关于时间的一阶导数。
( ) 7.1.5动坐标系上任一点的速度和加速度就是动点的牵连速度和牵连加速度。
( ) 7.1.6不论牵连运动为何种运动,关系式a a +a a r e =都成立。
( ) 7.1.7只要动点的相对运动轨迹是曲线,就一定存在相对切向加速度。
( ) 7.1.8在点的合成运动中,判断下述说法是否正确:(1)若r v 为常量,则必有r a =0。
( ) (2)若e ω为常量,则必有e a =0. ( ) (3)若e r v ω//则必有0=C a 。
( ) 7.1.9在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。
( )7.1.10当牵连运动为定轴转动时一定有科氏加速度。
( )二、 填空题7.2.1 牵连点是某瞬时 上与 重合的那一点。
7.2.2在 情况下,动点绝对速度的大小为r e a v v v +=,在 情况下,动点绝对速度的大小为22r e a v v v +=,在一般情况下,若已知v e 、v r ,应按___ ______计算v a 的大小。
三、选择题:7.3.1 动点的牵连速度是指某瞬时牵连点的速度,它相对的坐标系是( )。
A、 定参考系B、 动参考系C、 任意参考系 7.3.2 在图示机构中,已知t b a s ωsin +=, 且t ωϕ=(其中a 、b 、ω均为常数),杆长为L ,若取小球A 为动点,动系固结于物块B ,定系固结于地面,则小球的牵连速度v e 的大小为( )。
A、 ωLB、 t b ωωcosC、 t L t b ωωωωcos cos +D、ωωωL t b +cos四、计算题7.4.1 杆OA 长L ,由推杆BC 通过套筒B 推动而在图面内绕点O 转动,如图所示。
运动学部分复习题一、是非题(正确用√,错误用×,填入括号内。
)1、对于平移刚体,任一瞬时,各点速度大小相等而方向可以不同。
(×)2、在刚体运动过程中,若刚体内任一平面始终与某固定平面平行,则这种运动就是刚体的平面运动。
(× )3. 在自然坐标系中,如果速度v = 常数,则加速度a = 0。
(×) 4、点的法向加速度与速度大小的改变率无关。
( √ )5、如果知道定轴转动刚体上某一点的法向加速度,就可确定刚体转动角速度的大小和转向。
(× )6、平移刚体上各点的运动轨迹一定是直线。
(× )7、若动点相对动系的轨迹是直线,动系相对静系的运动是直线平动,则动点的绝对运动也一定是直线运动。
(×)8、在研究点的合成运动时,所选动点必须相对地球有运动(√)9、若动系的牵连运动为定轴转动,则肯定存在哥氏加速度C a。
(× ) 10、速度瞬心的速度为零,加速度也为零。
( × )11、基点法中平面图形绕基点转动的角速度与瞬心法中平面图形绕瞬心转动的角速度相同。
(√)二、选择题(请将正确答案的序号填入括号内。
)1、已知一动点作圆周运动,且其法向加速度越来越大,则该点运动的速度( A ) 。
A)越来越大; B)越来越小; C)保持不变; D)无法确定。
2、点的加速度在副法线轴上的投影( B )。
A)可能为零; B)一定为零; C)保持不变; D)无法确定。
3、动点的运动方程以弧坐标表示为)(t f s =,且沿坐标轴正向运动,但越来越慢,则 (D )。
(A)0<dt ds , 022<dt s d ; (B)0>dt ds, 022>dts d ;(C)0<dt ds , 022>dt s d ; (D)0>dt ds, 022<dts d 。
4、一绳缠绕在轮上,绳端系一重物,其以速度v 和加速度a向下运动,则绳上两点A 、D 和轮缘上两点B 、C 的速度、加速度之间关系为( D )。
第7章点的合成运动习题1.是非题(对画√,错画×)7-1.绝对运动是动点相对于定系的运动。
()7-2.相对运动是动点相对于动系的运动。
()7-3.牵连运动是动点相对于动系的运动。
()7-4.动点的绝对运动看成动点的相对运动和牵连运动的合成。
()7-5.动点相对速度对时间的导数等于动点的相对加速度。
()7-6.在一般情况下,某瞬时动点的绝对加速度等于动点的相对加速度和牵连加速度矢量和。
()2.填空题(把正确的答案写在横线上)7-7.在研究点的合成运动中,应确定、、。
7-8.图示机构设A 滑块为动点,BC 为动系,则A 滑块的绝对运动为;A 滑块的相对运动为;A 滑块的牵连运动为;科氏加速度的方向。
7-9.上题中若AD=l ,AD 以ω作匀角速度转动,且三角形ABD 构成等边直角三角形,则A 滑块的绝对速度a v = ;相对速度r v = ;牵连速度e v = ;绝对加速度τaa = 、n r a = ;相对加速度r a = ;牵连速度τe a = 、nea = ;科氏加速度c a = 。
ABCωD3.简答题7-10.定系一定是不动的吗?动系是动的吗?7-11.牵连速度的导数等于牵连加速度吗?相对速度的导数等于相对加速度吗?为什么?7-12.为什么动点和动系不能选择在同一物体上?7-13.如何正确理解牵连点的概念?在不同瞬时牵连运动表示动系上同一点的运动吗?7-14.科氏加速度是怎样产生的?当动系作平移时,科氏加速度等于多少?科氏加速度是怎样产生的?当动系作平移时,科氏加速度等于多少? 7-15.速度合成定理对牵连运动为平移或转动都成立,但加速度合成定理r e a a a a +=对牵连运动为转动却不成立?为什么?牵连运动为转动却不成立?为什么?7-16.如图所示曲柄滑块机构,若取B 为动点,动系固结于曲柄OA 上,动点B 的牵连速度如何?如何画出速度的平行四边形?速度如何?如何画出速度的平行四边形?OABCω7-17.如图所示的四连杆机构,曲柄OA 与BC 平行AB=BC=r ,问销钉B 相对于曲柄OA 的速度为多少?的速度为多少?4.计算题7-18.如图所示,点M 在平面y x O ¢¢中运动,运动方程为中运动,运动方程为)t cos (x -=¢140 t s i ny 40=¢ t 以s 计,x ¢、y ¢以mm 计,平面y x O ¢¢绕O 轴转动,其转动方程为t =j (rad ),试求点M 的相对运动轨迹和绝对运动轨迹。
习 题7-1 如图7-26所示,光点M 沿y 轴作谐振动,其运动方程为:x = 0,)cos(θω+=t A y ,式中,A 、ω、θ均为常数。
如将点M 投影到感光记录纸上,此纸以等速v e 向左运动,试求点在记录纸上的轨迹。
图7-26t v x e =')cos()cos(eθωθω+'=+=='x v A t A y y7-2 用车刀切削工件的端面,车刀刀尖M 的运动方程为 t b x ωsin =,其中b 、ω为常数,工件以等角速度ω逆时针方向转动,如图7-27所示。
试求车刀在工件端面上切出的痕迹。
图7-27t b t y t x x ωωωsin sin cos ='-'=0cos sin ='+'=t y t x y ωω解得)2sin(2cos sin sin tan cos sin t b t t b t t t t b x ωωωωωωω==+=' ]1)2[cos(2sin tan 2-=-='-='t b t b t x y ωωω 4)2()(222b b y x =+'+'7-3 河的两岸相互平行,如图7-28所示。
设各处河水流速均匀且不随时间改变。
一船由点A 朝与岸垂直的方向等速驶出,经过10 min 到达对岸,这时船到达点B 的下游120 m 处的点C 。
为使船A 能垂直到达对岸的点B ,船应逆流并保持与直线AB 成某一角度的方向航行。
在此情况下,船经12.5 min 到达对岸。
试求河宽L 、船相对于水的相对速度v r 和水的流速v 的大小。
图7-28m/s 2.0600120==v 600r L v = 船A 能垂直到达对岸的点B750a L v = 2a 22r v v v += 2222.0)750()600(+=L L m 200)7501()6001(2.022=-=L m/s 31r =v 7-4 半径R = 60mm 的半圆管BC 绕定轴OO 1按规律)5(t t -=ϕ转动,点在管内运动,相对于管子的运动方程为2π10t BM =(弧长的单位为mm),如图7-29所示。
2- 1凸轮以匀角速度绕°轴转动,杆AB的A端搁在凸轮上。
图示瞬时AB杆处于水平位置,°A为铅直。
试求该瞬时AB杆的角速度的大小及转向解:V a V e V r其中,v e. r2e2V a V e tg ev e所以AB a(逆时针)求当0时,顶杆的速度2-2.平底顶杆凸轮机构如图所示转动,轴0位于顶杆轴线上为R,偏心距OC e,顶杆AB可沿导轨上下移动,工作时顶杆的平底始终接触凸轮表面凸轮绕轴0转动的角速度为偏心圆盘绕轴0该凸轮半径,0C与水平线成夹角A(1)运动分析 轮心C 为动点,动系固结于AB ;牵连运动为上下直线平移,相对运动为与平底 平行直线,绝对运动为绕0圆周运动。
(2)速度分析,如图b 所示V - V - Vae r方向 丄OC 1 -大小? ?y 肋二人二 v a cos <p~eco2 — 3.曲柄CE 在图示瞬时以GOO 绕轴E 转动,并带动直角曲杆 ABD 在图示平面 内运动。
若d 为已知,试求曲杆ABD 的角速度解:1、运动分析:动点:A ,动系:曲杆O i BC,牵连运动:定轴转动, 相对运动:直线,绝对运动:圆周运动。
2、速度分析:V aV e V rV ai21 O ; V a V e '、2l OD 点与套在AE 杆上的套筒铰接。
0A 以匀角速度° 2 rad/s 转动, 02D l 3、3cm 。
试求:当30时,的角速度和角加速度。
O i BC0小(顺时针)2 — 4.在图示平面机构中,已知:0。
!AB ,OA 0,B r 3 cm ,摇杆 02D 在解:取套筒D为动点,动系固连于AE上,牵连运动为平动(1 )由V a V e V r ①得D点速度合成如图(a)得V a V e tg ,而V e1 /-因为V a — 3 o r,所以3V a-0.67 rad/s方向如图(a)所示(2)由a a a:a e ②得D点加速度分析如图(b)将②式向DY轴投影得n ・・a a cos a a sin sin而a a O2D l a e 0 rl sin rsinna a S in a e s in所以a acos2-5•图示铰接平行四边形机构中, O 1A O 2B 100 mm ,又O 1O 2 AB ,杆0小 以等角速度2 rad s 绕O 1轴转动。
杆AB 上有一套筒C ,此筒与杆CD 相铰接。
机构的各部件都在同一铅直面内。
求当 60时,杆CD 的速度和加速度。
解 杆CD 」.点Q 为功心,J tUB :牵it 运动为曲线平移•相对运动沿良i 直线,绝对运动为上卜直线。
速度与加速度分析分别如图b 、图c 所示,图中VJ = V B - V t * V CD = a A = a B = a t * n CD =山于是再、—=i\ = v t cos <p - O Y A ・曲 cos <p - 010 in/冒a CD = a 3 = $in 卩-O A co~ siii^ = 6346 m/f方向如图。
2 - 6图示圆盘绕AB 轴转动,其角速度 2trad/s 。
点M 沿圆盘半径ON 离开中心向外缘运动,其运动规律为 OM 40t 2mm 。
半径ON 与AB 轴间成60倾角。
求当t 1s 时点M 的绝对加速度的大小。
O 2Daana a sin a e sinl cos2.05rad/s 2,方向与图(b )所示相反。
解点M为动点,动系Oxyz固结于圆盘;牵连运动为定轴转动,相对运动为沿径向直线运动,绝对运动为空间曲线。
其中轴x垂直圆盘指向外,加速度分析如图所示,当t =1 s 时lad s * a -——-2 rad/s2, OM - 40r2二40 mm dfv = 一OM -80f = 80 mm/s fr dr= OM sin60°co2= 80^3 nun s2, □:= OM sin60°・a= 40^3 111111/s2 a r= ■一-= 80 mm/s?1 dz;7C = 2 s * 叫・sm 60°= 160\/3 nun s2a M二屁 +代+疋=7(^r cos600)2 +(tj f sin6O°-£7:)2 +(tj;+a c)2代入数据得a M-0.356 m/s32-7.图示直角曲杆OBC绕O轴转动,使套在其上的小环P沿固定直杆OA滑动。
已知:OB 0.1m,曲杆的角速度0.5rads,角加速度为零。
求当60时, 小环P的速度和加速度。
解:1、运动分析(图5-4):动点:小环M ;动系:固连于OBC; 绝对运动:沿OA杆的直线运动;相对运动:沿BC杆的直线运动;牵连运动:绕O点的定轴转动。
2、速度分析:V a V e V r (a)其中V a、V e、V r方向如图所示。
V e = OP =0.2 X0.5=0.1m/s ;于是(a)式中只有V a、V r二者大小未知。
从而由速度平行四边形解得小环M的速度V a= . 3v e=0.173m/s此外,还可求得V r=2 V e=0.2m/s。
2 .加速度分析(图5- 10)。
各加速度分析结果列表如下写出加速度合成定理的矢量方程a a= aen+ a r +aC应用投影方法,将上式加速度合成定理的矢量方程沿垂直 BC 方向投影,有3a COSd en COS 3Ca aa en 2a C由此解得2a M a a 0.35 m/s方向如图所示。
2 — 8 半径为R 的圆轮,以匀角速度 3。
绕O 轴沿逆时针转动,并带动 AB 杆绕A 轴转动。
在图示瞬时,OC 与铅直线的夹角为 60 ,AB 杆水平,圆轮与AB 杆的接触点D 距A 为•. 3R 。
求此时AB 杆的角加速度。
解:1.运动分析:动点:C , 动系:杆AB,绝对运动:圆周运 动,相对运动:直线,牵连运动: 定轴转动。
2. 速度分析(图 a )V a V e V rV a R 0 V e V eAB 2R "2" v r 03. 加速度分析(图 b )n ta & a 「 a e a e沿铅垂方向投影: a a cos60a ;cos30 a ;s in30a;n 1 2tan30 @ ae )(0 R%■ 3—R)ABt电CA习题5— 15图2-10曲柄O 1M 1以匀角速度 运动,M 2为该构件上固连的销钉。
当机构运动到如图所示位置时, w =3 rad / s 绕O 1轴沿逆时针转动。
T 形构件作水平往复 槽杆 O 2E 绕O 2轴摆动。
已知O 1M= r = 20cm , l = 30 cm 。
0= (j= 30,求此时 02E 杆的角加速度。
CM iA j -02lM —V e2~■■■■'-■ BE(a ) 习题5- 16图M 1an运动分析:动点: z7777x 02©TT'T B(b)t ja e2nle2M•…•- aa2a c:解:1. 牵连运动:平移。
速度分析(图a ): V a1V a 1 r 1 60cm/s; V e1加速度分析(图b ): M i ,动系: V e1 V r1V ai sin a a1 a r1 30cm/s 沿铅垂方向投影: a ai cosAB ,绝对运动:圆周运动, 相对运动:直线,2.运动分析:动点: 动:定轴转动。
速度分析(图a ): V a2 V ei 30 cm/s ; M 2,动系: V a2 V e2 v a2sin 15 cm/s ; 加速度分析(图b ):a e1 3 2 杆 — 290 3 cm/s O 2E ,绝对运动:直线,相对运动:直线,牵连运 V e2 V r2V a2 cos 15 3 cm/s ; V e2 O 2E j COSna a2 a 「2 a e20.75「ad/s t ae2a c2a ;2 a C ; a ;2 a ei cos30 a C2 135 2 15 0.75 157.5cm/s2-11 牛头歯床机构如图所小 Lili = 200mm.角速度=2rad/s,求图示位誉滑祝CD 的速度和加逑度*解〔1)先収0]/上点卫为动点,动系固结TO Z B-绝对运动为绕O x W?i 运动”相 対运动为沿运动为绕Qj 定轴转动•速度“加速度分析如圈也图c 所示。
'&O.B 的角速度力血,角加速度'ha.山图知0{ .1 = 0.4 m ・ v A - ® ・ O X A = 04 m/sv r =cns30° = 0一20寸3 IIL s ・ v VdL = v 4 sm30° = 0.20nVs又 vAi ~ <o -O z A所以O 2Etae2cosl157.5.3 ~60~24.55「ad/s沿a C 方向投影:a a2 cos由逋度分析图弘27b*所以e - —— = 0.5 rad sO.A由M 递度分析圈c. e分别向轴小y 投戲得—£i 4 = 一“; CQS 60°—CJ '^ cos30° -£/ n一。
応 cos30°0 = —sin Gt)0 + u 'Je SIII 303 + £/ 卄 sin60° + a ie sin 30° 把 a A = /y" 0}A = 0.8m/s 2 *= €t>~ *O :A = 0」0nVS" ?a fc = a O :A = 0.40a in s : T 理” =2/iA L Hr = 0 20\3 ms 2代入式⑴,消去乞掘* Mfia - — rad/'s -(逆)(2)再取摇tr O 2B ±的点B 为动為 功和购门汨枕CD ;绝的运动対绕Q 冏周 运动.相时运动为上下血线运动.牵述运功为水平『[线平移.速度、加速度分析如图臥I3TWB八»0.65 心 *65 &『v… = C?n n o = - -x0.5 = - m s£ - cos30° 3v cp =廿蘇=珠 cus 30° = 0.325 IIL 'JS (—)彳3 盘E + H 呂=口班+凸Jir向轴耳投影御—£?gcos3()6 -i?^cos6(r = -a Sc把—、c ( = 0.65 m :s~.— 口;:二 O 2B <I >_ = 0.1S7 6 ill's -代入A (3).解得* 亠a CD = fl fle =0.65^ni/s^ d2— 12.绕轴O 转动的圆盘及直杆OA 上均有一导槽,两导槽间有一活动销子 M 如 图所示,b 0.1m 。