RMxprt软件在电机设计中的应用
- 格式:ppt
- 大小:2.74 MB
- 文档页数:51
题目:Maxwell电磁仿真RMXprt参数定义随着科技的不断进步,电磁仿真技术在工程设计和研发中发挥着越来越重要的作用。
Maxwell电磁仿真软件是一款功能强大的电磁场分析工具,能够帮助工程师们快速准确地进行电磁场仿真分析。
在Maxwell软件中,RMXprt是其中一个重要的参数定义工具,它能够帮助工程师定义和分析电磁仿真中的参数,从而为设计和研发工作提供重要的支持。
本文将对Maxwell电磁仿真RMXprt参数定义进行详细介绍,希望能够帮助读者更好地了解和掌握这一工具。
一、RMXprt参数定义的基本概念1.1 RMXprt的作用RMXprt是Maxwell电磁仿真软件中的一个重要工具,它主要用于定义和分析电磁仿真中的参数。
在电磁场分析中,各种参数的定义和分析是十分重要的,它们直接影响着电磁场的分布和特性。
通过RMXprt工具对参数进行准确的定义和分析,可以有效地帮助工程师们进行电磁场仿真分析,为设计和研发工作提供重要的支持。
1.2 RMXprt参数定义的基本原理RMXprt工具的参数定义是建立在Maxwell电磁场理论基础之上的,它通过对电磁场的特性进行分析和计算,从而确定各种参数的定义。
在进行参数定义时,工程师们可以根据实际需求,对各种参数进行灵活的设置和调整,以满足不同应用场景的需求。
熟练掌握RMXprt工具的参数定义原理,对于工程师们进行电磁场仿真分析具有重要的意义。
二、RMXprt参数定义的具体操作步骤2.1 打开RMXprt工具工程师们需要打开Maxwell电磁仿真软件,并选择RMXprt工具进行参数定义。
在打开RMXprt工具之后,工程师们可以看到一个界面,界面中包含了各种参数定义的选项和设置。
2.2 选择参数定义的类型在打开RMXprt工具之后,工程师们需要根据实际需求选择参数定义的类型。
Maxwell软件提供了多种参数定义的类型,包括线圈定义、磁路定义、绕组定义等。
工程师们可以根据实际需求选择相应的参数定义类型,并进行后续的操作。
基于旋转电机专家模块RMxprt的电机学课程教学探讨夏永洪;陈瑛;肖倩华;杨莉【摘要】为了更好地讲授电机学课程,利用计算机辅助软件是教师进行教学的一种常用而又行之有效的教学手段。
针对Ansoft软件的旋转电机专家模块RMxprt 在电机学课程中的辅助教学进行探讨,阐述了RMxprt模块的建模方法,以同步电机为例,直观地展示了电机结构、绕组排列、气隙磁密、磁场分布、电动势波形以及绕组电流波形,为学生更好地学习和掌握同步电机起到了良好的辅助教学作用。
%In order to teach the course of electric machinery better, using the computer aided software is a kind of common and effective teaching methods. The rotating machine experts RMxprt of Ansoft software is applied for the aided teaching of the electric machinery course, and the modeling method is described. For the synchronous machine, the machine structure, winding layout, air gap lfux density, magnetic ifeld distribution, EMF waveform and armature winding current waveform are displayed clearly, which play a good auxiliary teaching role to learn and master the synchronous machine better for the students.【期刊名称】《中国现代教育装备》【年(卷),期】2016(000)011【总页数】3页(P45-47)【关键词】电机学;RMxprt;教学探讨【作者】夏永洪;陈瑛;肖倩华;杨莉【作者单位】南昌大学信息工程学院江西南昌 330031;南昌大学信息工程学院江西南昌 330031;南昌大学信息工程学院江西南昌 330031;南昌大学信息工程学院江西南昌 330031【正文语种】中文电机学课程是电气工程及其自动化专业的一门重要课程,同时也是大多数学生认为难度较大的一门课程。
基于RMxprt的异步电机分析与设计摘要:异步电动机因其结构简单、运行可靠、维修方便、价格便宜等优点而广泛应用于各行各业。
但是异步电机在运行时,必须从电网吸收无功功率,会使电网的功率因数变差,对低转速的电机尤为显著。
因此对异步电动机实施有效的控制,保证电机的节能运行,避免电机对电网造成冲击,使之安全经济运行具有十分重要的意义。
本文首先对异步电动机的各种损耗进行分析,并研究降低损耗的方法。
通过RMxprt14完成了异步电动机节能运行控制系统的仿真研究。
仿真结果验证了结论的正确性和有效性。
关键词:异步电机,节能控制,RMxprt14目录1 绪论1.1 背景1.1.1 异步电动机节能控制的意义我国是一个发展中的大国,人口占世界的20.43%,而能源却相对匮乏,人均能源占有不到道世界平均水平的一半。
近几年来,我国已成为能源消耗大国。
能源日趋紧张,已经严重制约我国经济发展。
在资源不足的情况下,我国还存在能源利用低下和无节制的资源浪费现象。
我国目前能源利用率比国际先进水平低10个百分点,能源密集产品单位耗能平均比国际先进水平高45%,由此引起的环境污染和资源可接问题已日趋严重。
电能作为工业生产中最主要能源,同时异步电机作为一种重要的动力设备,其用电量是非常大的。
这些异步电动机一般都是按照设计的负载进行选择的,但在实际使用中,大都经常处在轻载,甚至在空载下运行。
因此,“大马拉小车”的现象几乎是很普通的,如生产常用的胶带输送机、绞车、机床等设备在大部分运行时间中,电动机的负荷变动都较大,其平均输出功率与最高输出功率之比一般为0.3~0.4,有的还更低。
电动机的负载率低,效率不高,电能的浪费现象十分严重。
1997年国家统计局统计数字表明,每年我国各种电机设备消耗全国年发电量的60%,其中90kW以内的中小功率异步电动机耗能占总电机耗能的70%,差不多消耗了4200亿度电。
折合成人民币经济损失达到210亿元。
如果这些异步电动机能够节电10%,就可节约21亿元人民币。
RMxprt在三相异步电动机中的2D电磁场分析杨凯辰;杨文焕;王峰;季莉莉【摘要】RMxprt是基于电机等效电路和磁路的设计理念来计算、仿真各种电机模型,具有建立模型简单快捷、参数调整方便等优点,同时具备一定的设计精度和可靠性.针对如何才能更好地计算仿真三相异步电动机,求解二维和三维有限元件这一问题.文中以一台三相异步电动机为蓝本,分析RMxprt模块在三相异步电动机的2D电磁场的应用.将实验计算结果与有限元结果进行横向对比,误差仅0.366 2%,符合工程需要.【期刊名称】《电子科技》【年(卷),期】2015(028)010【总页数】4页(P158-160,165)【关键词】Maxwell;三相异步电动机;2D电磁场分析【作者】杨凯辰;杨文焕;王峰;季莉莉【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TM343电机设计有近百年的历史,在电机性能和指标不断提高的同时,电机设计手段也有了较大幅度的改进,这其中一直秉承电机设计传统的是基于电机等效电路和磁路法的设计方法。
等效电路和磁路法设计,简单快捷,且具备一定的设计精度,至今仍是电机领域的主要设计方法之一。
AnsoftV12 版本中,除了二维、三维电磁场计算外,还嵌入了RMxprt 电机分析模块,该模块正是基于等效电路和磁路的计算方法[1]。
电场计算在一些高压领域、绝缘材料领域、电机变压器领域等都受到重视。
电场作为电磁场的一个统一整体,相对于磁场计算来讲,其发展稍显缓慢。
在新版AnsoftV12 中,电场计算模块仍无法进行非线性材料的计算,而对于磁场,非线性材料中的磁场分布已较为成熟。
对电场计算的研究不仅是理论层面的深入需求,也是实际应用的需要。


ANSYS机电产品之电机设计专家工具----RMxprtANSYS China庄百兴baixing.zhuang@ANSYS虚拟的“V”模型设计理念RMxprt V15RMxprt特点✓操作简洁✓计算速度快✓可参数化和优化分析✓可分析19种电机✓一键创建Maxwell2D/3D有限元模型✓一键创建Simplorer控制模型RMxprt 电机设计专家19种电机类型☐轴向磁场电机☐调速运行永磁同步电机☐发电机、电动机☐永磁无刷直流电机☐爪极发电机☐电励磁直流电机☐发电机、电动机☐通用旋转电机(双馈发电机)☐电动机、风力发电机☐自起动三相永磁同步电机☐永磁直流电机☐单相感应电机☐开关磁阻电机☐三相感应电机☐三相隐极同步电机☐发电机、电动机☐三相凸极同步电机☐发电机、电动机☐通用/串激电机电机类型:如轴向磁场电机•永磁转子或者交流绕线转子•定子单边或者双边结构Machine Setup–Source type: DC –Structure: Inner Rotor –Stator type: SLOT_AC (with position control)–Rotor type: PM_INTERIOR电机类型:如IPM BLDC 电机Machine Setup–Source type: AC/DC –Structure: Inner Rotor –Stator type: SLOT_AC (without position control)–Rotor type: PM_INTERIOR电机类型:如IPM ASSM 电机/发电机Source Type ACDCStructure Inner RotorOuter RotorAxial-Flux RotorStator Type SLOT_ACSLOT_AC1; SALNT_POLE;SALNT_SHAD; SALNT_DCM;NONS_SLOT; PM_SURFACE;PM_INTERIOR; PM_CLAW;AXIAL_AC; AXIAL_PMRotor Type SLOT_ACSLOT_DC; SLOT_CAGE;SALNT_POLE; NONS_SLOT;NONS_RELU; PM_SURFACE;PM_INTERIOR; PM_CLAW;AXIAL_AC; AXIAL_PM;AXIAL_DC; AXIAL_CAGE电机类型:如通用旋转电机GRMStator / RotorTypes SourceTypePositionSensorMachineTypeOperationTypeSolutionSLOT_AC /SLOT_ACAC Yes DFIG Generator FullSLOT_AC / PM_INTERIORDC Yes BLDC Motor Partial(Full in V16) AC / DC No ASSM Motor Partial(Full in V16) AC No ASSM Generator PartialAXIAL_AC / AXIAL_PMDC Yes BLDC Motor Full AC / DC No ASSM Motor Full AC No ASSM Generator Partial电机类型:如通用旋转电机GRM及研发当今产品研发差异化日益趋于异同;针对用户需求开发功能您的电机类型不在上述之列Double-Fed Induction Generators (DFIG):•Variable frequency excitations•Maximum power point tracking (MPPT)Universal Operating Modes:•Motors•Generators (wind-power generators)Machine Type:Wound RotorInduction Machine针对用户需求开发功能如:绕线转子感应电机(双馈风力发电机)针对用户需求开发的功能绕线转子感应电机(双馈风力发电机)快速设计和方案优选•操作简单•计算速度快•可参数化和优化分析输入求解数据输入转子输入定子数据输入槽型输入绕组快速设计和自动设计每槽线匝数和线径自动设计槽型尺寸部分自动设计Cogging Torque Efficiency CurrentPowerEMF快速输出结果报告和方案优选0.005000.0010000.0015000.00RSpeed [rpm] 0.0010000.0020000.0030000.0040000.0050000.0060000.0070000.0080000.0090000.00O u t p u t T o r q u e [F o o t P o u n d s ]Ansoft Corporation3_FreqSweep XY Plot 1Curve InfoOutputTorqueSetup1 : PerformanceScaleFactor='1'OutputTorqueSetup1 : PerformanceScaleFactor='1.5'OutputTorqueSetup1 : PerformanceScaleFactor='2'OutputTorqueSetup1 : PerformanceScaleFactor='2.5'OutputTorqueSetup1 : PerformanceScaleFactor='3'OutputTorqueSetup1 : PerformanceScaleFactor='3.5'OutputTorqueSetup1 : PerformanceScaleFactor='4'OutputTorqueSetup1 : PerformanceScaleFactor='4.5'OutputTorqueSetup1 : PerformanceScaleFactor='5'OutputTorqueSetup1 : PerformanceScaleFactor='5.5'OutputTorqueSetup1 : PerformanceScaleFactor='6'OutputTorqueSetup1 : PerformanceScaleFactor='6.5'OutputTorqueSetup1 : PerformanceRMxprt自带OPT优化模块RMxprt输出报告到自定义的Excel表格Outer-Rotorand Inner-RotorStructure支持内转子或外转子结构支持转子或者定子斜槽结构支持多种运行模式如:单相电机有四种运行模式:电容运转模式、电容起动模式、电容运转电容起动、电阻起动模式Various Core Types支持多种永磁电机转子结构SlotTypes支持多种槽型:6种基本槽型RadiusStart WidthStart WidthEnd WidthHeightStart WidthEnd Width八种基本槽型元素的任意组合槽型编辑器RadiusStart WidthRadiusStart Width对称或者非对称槽型扩展现有六种基本槽型槽型编辑器:允许对6种基本槽型修改支持自动绕组排列支持自定义绕组编辑Wire Library for BothANSI and IECIEC R20/R40方线IECR20/R40 Grade 1/2/3 Film 圆线ANSI Single/ Heavy/ Triple/ Quad Film 圆线ANSI 方线支持用户自定义非线性材料库支持用户自定义永磁材料并共享材料库LT feijing.ssf共享材料库灵活的User Defined Data (UDD )UDD应用:感应电机带套筒实心转子❑Description–Parameters for solid rotor induction motor–Partial solutions for Maxwell 2D/3D designs–SolidCore = 1 for solid rotor; = 0 for originaldefined rotor–SleeveThick: thickness of the copper sleeve (mm)❑Format and Default Value–SolidCore0–SleeveThick0❑Machine Types Supported–Generic Rotating Machine: IPM CoreRMxprt特色核心技术:一键有限元根据模型的周期性,自动生成计算周期最小的参数化几何模型自动赋材料属性,设置永磁体的充磁方向,考虑通风沟、叠压系数的影响自动设置运动边界条件自动设置主从边界条件自动设置绕组,激励,外电路自动剖分设置自动求解和输出设置RMxprt特色核心技术:一键有限元完全的材料属性设置(包括充磁方向和硅钢片的叠压方向)自动创建几何模型自动选择端部连接形式选择计算周期最小的主从边界调节以及轴向对称边界调节完全的激励设置(包括外电路设置)完全的Maxwell3D 有限元模型建立RMxprt特色核心技术:一键有限元一键有限元:支持自定义槽型模型For All Machine Types:•Magnetic circuit solution for teeth•Slot leakage inductance computationSupport EditedSlot Type inRMxprt Solvers求解算法支持自定义槽型Maxwell Design Creation:•2D geometry creation by scripts•3D geometry creation by scriptsRMxprt特色核心技术:一键有限元0.001.002.003.004.005.006.007.008.00Tim e [s ]-3.00-2.00-1.000.001.002.003.00Y 1 [N e w t o n M e t e r ]C o g g in g T o rq u e0.14022.22710.43540.5877M X 2: 5.4031M X 1: 0.63790.005.0010.0015.0020.0025.00Y 1 [N e w t o n M e t e r ]Ansoft LLC Maxwell2D_vload_lXY Plot 3Curve Info Moving1.Torque Setup1 : Transient-Moving1.LoadTorque Setup1 : Transient一键求解电磁场有限元‐‐‐‐一键有限元优势!AB CN ROT1ROT2ASSM+speedAI AAI BAI C+VPWM _A PWM _BPWM _CE1E2SPICE_D1SPICE_D2SPICE_D3SPICE_D4SPICE_D5SPICE_D6SPICE_D7SPICE_D8SPICE_D9SPICE_D10SPICE_D11SPICE_D12S1S2S3S4S5S6自动创建Simplorer电路模型Simplorer + RMxprt© 2012 ANSYS, Inc.October 23, 201241Maxwell 2-D/3-D Electromagnetic ComponentsSimplorer System DesignPP := 6PMSYNC IA IBIC Torque RMxprt Motor Design RMxprt 系统Model order ReductionCo-simulation谢谢© 2012 ANSYS, Inc.October 23, 201242。
Ansoft培训:基于RMxprt的无刷直流电机(BLDC)设计山东大学 贝加莱现代电机控制实验室 *************一、无刷直流电机的基本原理无刷直流电机的特点是,定子绕组通入阶跃的电流,产生步进的磁动势。
而永磁转子则在这个步进的磁动势中转动。
额定工作时,转速比较稳定,转子的磁场可以认为是稳定旋转的,而定子的磁场则是步进的,因此二者的磁场产生的转矩是脉动的。
通常来讲,无论交流电机还是直流电机,定转子磁场正交时(即轴线互差90°电角度)产生的转矩最大。
无刷直流电机的定转子磁场之间的夹角是时大时小的,如果平均值为90°电角度,那么,一个“导通状态”(即定子电流不变,转子稳定旋转)下的“定转子平均磁场夹角”可以认为是正交的角度。
下面举例说明。
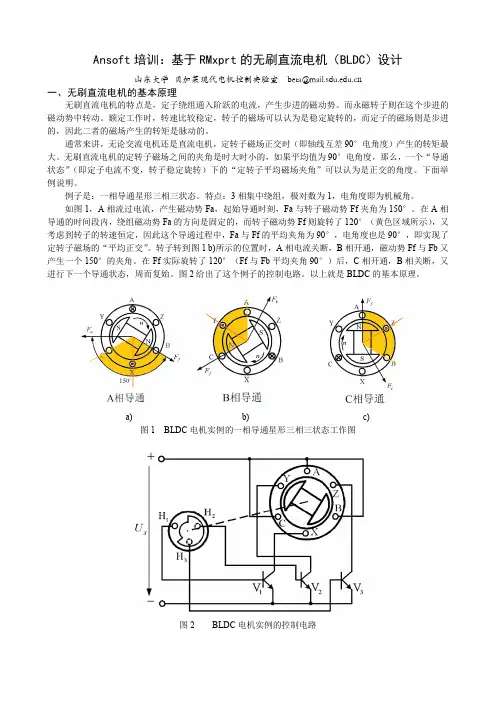
例子是:一相导通星形三相三状态。
特点:3相集中绕组,极对数为1,电角度即为机械角。
如图1,A相流过电流,产生磁动势Fa,起始导通时刻,Fa与转子磁动势Ff夹角为150°。
在A相导通的时间段内,绕组磁动势Fa的方向是固定的,而转子磁动势Ff则旋转了120°(黄色区域所示),又考虑到转子的转速恒定,因此这个导通过程中,Fa与Ff的平均夹角为90°,电角度也是90°,即实现了定转子磁场的“平均正交”。
转子转到图1 b)所示的位置时,A相电流关断,B相开通,磁动势Ff与Fb又产生一个150°的夹角。
在Ff实际旋转了120°(Ff与Fb平均夹角90°)后,C相开通,B相关断,又进行下一个导通状态,周而复始。
图2给出了这个例子的控制电路。
以上就是BLDC的基本原理。
a) b) c)图1 BLDC电机实例的一相导通星形三相三状态工作图图2 BLDC电机实例的控制电路二、电机设计要求基本要求:5501500=0.85220()N N N P W n rpm U V DC ,,,,本着尽量节省用铜的设计原则。
12 爪极交流发电机本章我们将简化RMxprt 一些基本介绍,以便介绍一些更高级的使用。
有关RMxprt 基本操作的详细介绍请参考第一部分的章节。
12.1基本原理爪极交流发电机(或爪极同步发电机)广泛的用于汽车工业,它将输入的机械功率转换为电功率。
爪极发电机的定子上嵌有多相电枢绕组,其极数与转子相同。
转子上装有较特殊的爪形磁极,这种磁极结构有利于在转子直径较小的情况下,安排较多的磁极。
爪极转子上装有励磁绕组或永磁体,转子旋转时,在气隙中产生旋转磁场,该磁场会在定子绕组中产生感应电压。
除了转子结构有较大的差别外,爪极电机的电磁分析方法与同步发电机相同,常采用频域相量图进行性能分析。
图 12.1 爪极发电机相量图图12.1中,R 1和X 1是电枢绕组的电阻和漏电抗。
如果爪极交流发电机装有永磁体,则d 轴电枢反应电抗X ad 和q 轴电枢反应电抗X aq 大致为定值。
此外,X ad 是经过线性化处理的非线性参数,X aq 是线性参数。
d 轴同步电抗X d 和q 轴同步电抗X q 可按下面的公式计算:aq1q ad 1d X X X X X X +=+=(12.1)12.1.1 带有励磁绕组的转子如果转子装有励磁绕组,则励磁电流是可调的,d 轴和q 轴的电流可按下面步骤求得。
以输入电压U 为参考相量,设功率因数角为φ, 则电流相量为ϕ-∠=I I(12.2)图中OM 所代表的相量可表示为:)j j (aq 11X X R OM +++=I U (12.3)设E 0与U 的夹角为θ(θ称为功率角),则E 0与I 的夹角为θϕψ+=(12.4)相量ON 的长度代表由d 轴磁通产生的反电势,可用来确定d 轴磁场是否饱和。
d 轴和q 轴电流可分别按下式求出: ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (12.5)相量ON 的长度代表由d 轴磁通产生的反电势,可用来确定d 轴磁场是否饱和。
最新Ansoft永磁同步电机设计报告本文介绍了利用Ansoft Maxwell软件中的RMxprt模块对一台4极、36槽绕组永磁同步电动机进行建模、仿真和分析的方法。
该软件不仅可以进行静磁场、静电场、交直流传导电场、瞬态电场、涡流场、瞬态磁场等不同的基本电磁场的特性分析,还可以通过RMxprt电动机模块仿真多种电动机模型,为实际电动机设计提供帮助。
本章主要介绍了RMxprt在永磁同步电机中的电机性能分析,包括Stator项和Rotor项的设置过程以及Line Start-XXX的电机仿真和计算结果的查看。
第3章静态磁场分析静态磁场分析是电机设计和研究的重要内容之一。
本章介绍了电机模型和网格剖分图、磁力线分布图以及磁密曲线等内容。
其中,磁密曲线包括气隙磁密分布、定子齿、轭部磁密大小和转子齿磁密大小等,对电机的性能分析具有重要意义。
第4章瞬态场分析瞬态场分析是电机设计和研究的另一个重要内容。
本章主要介绍了电机在额定稳态运行和额定负载启动时的性能分析。
其中,额定稳态运行性能包括电流与转矩大小以及各部分磁密等内容;额定负载启动则包括转矩-时间曲线、电流-时间曲线、转速-时间曲线和转矩-转速曲线等内容。
这些分析结果可以为电机的设计和优化提供重要参考。
After determining the main ns。
XXX。
The weight。
price。
operating characteristics。
and XXX of the motor are also closely related to the main XXX。
determining the main ns is the first stepin motor design.The rated power is 1500W。
the rated voltage is 380V。
the phase number and phase n method are 3-phase 4-pole Y n。
Getting Started with RMxprtfor Brushless Permanent-Magnet Motors (BLDC)Step 1:點選Maxwell 11圖示,進入Maxwell – Project1視窗畫面。
圖1:Maxwell 11圖示圖2:Maxwell – Project1視窗畫面Step 2:選取Project內之Insert RMxprt Design,建立RMxprt的設計專案,於Select Machine Type內選擇欲設計之馬達種類Brushless Permanent-Magnet Motors。
圖3:建立RMxprt的Project圖4:選取欲設計之馬達種類圖5:設定完成後之Project視窗畫面Step 3:進入專案管理視窗區內,將RmxprtDesign1展開,點選Machine後,於屬性視窗區內設定Machine參數。
圖6:專案管理視窗區 Project Manager圖7:Machine屬性視窗區 PropertiesNumber of Poles:馬達極數。
Rotor Position:分為內轉(Inner Rotor)與外轉(Outer Rotor)兩種型式。
Frictional Loss:摩擦損。
Wind Loss:風損。
Reference Speed:查詢轉速設定,會分析在此轉速下之馬達性能資料。
Control Type:控制方式,點選後有DC及CCC兩種控制方式可供選擇。
DC:直流電源輸入,電流大小不受控制,在低轉速時會產生大電流。
CCC:Chopped Current Control (電流截波控制),利用電子開關以限制輸入電流之大小。
圖8:CCC典型電流波形Circuit Type:馬達內部接線法,有Y3、L3、S3、C2、L4及S4六種可供選擇。
圖9:Circuit Type示意圖Step 4:於專案管理視窗區內,將Machine展開,點選Circuit,進入屬性視窗區內設定Circuit 參數。
maxwell软件-三相同步电机设计10 三相同步电机本章我们将简化RMxprt ⼀些基本介绍,以便介绍⼀些更⾼级的使⽤。
有关RMxprt 基本操作的详细介绍请参考第⼀部分的章节。
10.1 分析⽅法三相凸极同步电机有发电机和电动机之分,两者的结构基本相同。
三相同步发电机是⼯业、商业以及民⽤的主要电能来源,它将机械能转化为电能,其转⼦上装有由直流电励磁的多级绕组,定⼦上装有三相正弦分布绕组,转⼦旋转在⽓隙中产⽣旋转磁场。
定⼦上感应出电压,频率为:60pn f /= (10.1) 其中p 是极对数, n 是转⼦的机械转速,单位rpm ,⼜称为同步转速,电机可以根据负载需要来产⽣有功功率和⽆功功率。
通常采⽤频域⽮量图来对电机进⾏分析,发电机和电动机的⽮量图如图10.1所⽰。
a. 发电机b. 电动机图10.1 同步电机⽮量图图中R 1和X 1分别为电枢绕组电阻和漏电抗,X ad 和X aq 分别为d 轴电枢电抗和q 轴电枢电抗。
相量图中X ad 是经过线性化处理的⾮线性参数。
以输⼊电压U 为参考相量,则电流相量为:-∠=I I(10.2) 设功率因数⾓为φ, 是电压相量U 与电流相量I 的夹⾓,图中OM 所代表的相量可表⽰为++-+++=motor for X X R generator for X X R OM aq 11aq 11)j j ()j j (I U I U (10.3) 设E 0与U 的夹⾓为θ,(对于发电机θ称为功率⾓,对于电动机θ,称为⼒矩⾓),则E 0与I 的夹⾓为θ?ψ+= (10.4)d 轴和q 轴电流可分别按下式求出==ψψcos sin I I I q d I (10.5)图中ON 相量代表由d 轴磁链所产⽣的d 轴反电势。
由磁路空载特性曲线,可确定E 0,X ad 和励磁电流I f1. 对于发电机:输出电功率:cos UI 3P 2=(10.6) 输⼊功率(机械功率) :ex Cuf add Fe Cua fw 21P P P P P P P P ++++++= (10.7) 式中:P fw , P Cua ,P Fe ,P add ,P cuf 和P ex 分别为风摩损耗、电枢铜损、铁⼼损耗、附加损耗、励磁绕组铜损和励磁机损耗输⼊机械转矩:ω11P T = (10.8)式中ω为同步⾓速度,单位:rad/s2. 对于电动机:输⼊电功率:cos UI 3P 1=(10.9) 输出机械功率:()ex Cuf add Fe Cua fw 12P P P P P P P P +++++-= (10.10) 式中:P fw , P Cua ,P Fe ,P add ,P cuf 和P ex 分别为风摩损耗、电枢铜损、铁⼼损耗、附加损耗、励磁绕组铜损和励磁机损耗输出机械转矩:ω22P T =(10.11) 电机效率:%100P P 12?=η(10.12) 10.2 主要特点10.2.1 适⽤于同步电动机和同步发电机凸极同步电动机和发电机结构基本相同,相量关系和计算⽅法有些差别,输出性能数据也有所不同。
永磁无刷电机RMxprt 简捷设计步骤一. 电机性能输入:并用恒转矩设置计算,设置槽满率二.优化冲片和磁钢:调整冲片的齿磁密和轭磁密和其他尺寸三.电机性能初算:调整电机长度,确定合理体积尺寸(额定点到最大效率点或其他点) 四.改变匝数和线径,调整电机转速和电流密度到设计目标值,但引起槽满率超差 五.保持线径,减少槽内导体根数,改变定子长度使电机槽满率达到要求 六.改变长度,作一次转速微调原电机 750W, 280V DC ,2000r/min, 12-8j目标电机 1500W ,280V DC ,2000r/min ,12-8j 原冲片内外径不变,要求槽满率65% 电流密度5A/mm 2,原电机技术参数见介绍一.电机性能输入,并用恒转矩设置计算 1. 电机输入设计要素,并计算:**************************************************************** 二.优化冲片:调整齿磁密和轭磁密(冲片其他设置略) 2. 计算齿磁密:原5.5=t b , 026.2=Z B 3. 调整齿磁密到1.8T :原5.5=t b , 026.2=Z B19.65.58.1026.22=⨯=t b ,计算:T B Z 88.1= 47.619.68.188.13=⨯=t b ,计算:T B Z 83.1=58.647.68.183.14=⨯=t b ,计算:T B Z 78359.1= 4. 轭宽调整到1.54T : 原T B j 21348.1=(轭宽与槽高不成正比) 调整槽高,5.102=S H ,使T B j 54692.1= 5. 调整槽形、槽口尺寸和磁钢形状和牌号:NO-LOAD MAGNETIC DATAStator-Teeth Flux Density (Tesla): 1.78359 Stator-Yoke Flux Density (Tesla):1.54692***************************************************************三.恒转矩性电机能初算(经过计算可以看出额定点在机械特性曲线的位置,判断电机体积合理与否)6. 设置线圈0=N ,0=d ,设置槽满率=0.70,(槽满率设置后,RMxprt 自动计算导体根数时会确保设定的槽满率之内) 恒转矩进行计算:(设置恒转矩后,RMxprt 计算后会确保该转矩的电机性能)********************************************************************** 四.调整电机长度到最大效率点查看该电机的机械特性曲线,取额定转矩点,看效率点在最大效率点左边还是右边,如果要求电机额定点在最大效率点附近,则左边要比例按增加长度,右边要按比例减少长度。