第一章习题解答
- 格式:ppt
- 大小:697.50 KB
- 文档页数:3
第⼀章习题答案第⼀章思考题答案1.基于总线结构的计算机系统通常由哪5个部分构成?并简述各部分的主要作⽤。
解答:1.中央处理器CPU(central processor unit)或称微处理器(microprocessor unit)中央处理器具有算术运算、逻辑运算和控制操作的功能,是计算机的核⼼。
2.总线总线是把计算机各个部分有机地连接起来的导线,是各个部分之间进⾏信息交换的公共通道。
3.存储器(memory)存储器的功能是存储程序、数据和各种信号、命令等信息,并在需要时提供这些信息。
4.输⼊输出(I/O)接⼝外部设备与CPU之间通过输⼊输出接⼝连接。
5.输⼊输出(I/O)设备输⼊设备是变换输⼊信息形式的部件。
它将⼈们熟悉的信息形式变换成计算机能接收并识别的信息形式。
输出设备是变换计算机的输出信息形式的部件。
它将计算机处理结果的⼆进制信息转换成⼈们或其他设备能接收和识别的形式,如字符、⽂字、图形等。
2.试举例说明计算机进⾏加法运算的⼯作过程。
解答:⽰例如下:inta,b,c;c=a+b;⼯作过程简述:a,b,c都为内存中的数据,CPU⾸先需要从内存中分别将a,b的值读⼊寄存器中,然后再执⾏加法运算指令,加法运算的结果暂存在寄存器中,因此还需要执⾏数据存储指令,将运算结果保存到内存中,因此像上例中的C语⾔语句,实际上需要经过两条数据读取指令,⼀条加法运算指令,⼀条数据存储指令才能完成。
3.“冯·诺依曼型结构”计算机与哈佛结构计算机的差别是什么?各有什么优缺点?解答:冯·诺依曼结构计算机具有以下⼏个特点:①有⼀个存储器;②有⼀个控制器;③有⼀个运算器,⽤于完成算术运算和逻辑运算;④有输⼊和输出设备,⽤于进⾏⼈机通信;⑤处理器使⽤同⼀个存储器存储指令和数据,经由同⼀个总线传输。
哈佛结构计算机:①使⽤两个独⽴的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存;②具有⼀条独⽴的地址总线和⼀条独⽴的数据总线,利⽤公⽤地址总线访问两个存储模块(程序存储模块和数据存储模块),公⽤数据总线则被⽤来完成程序存储模块或数据存储模块与CPU 之间的数据传输;③两条总线由程序存储器和数据存储器分时共⽤。
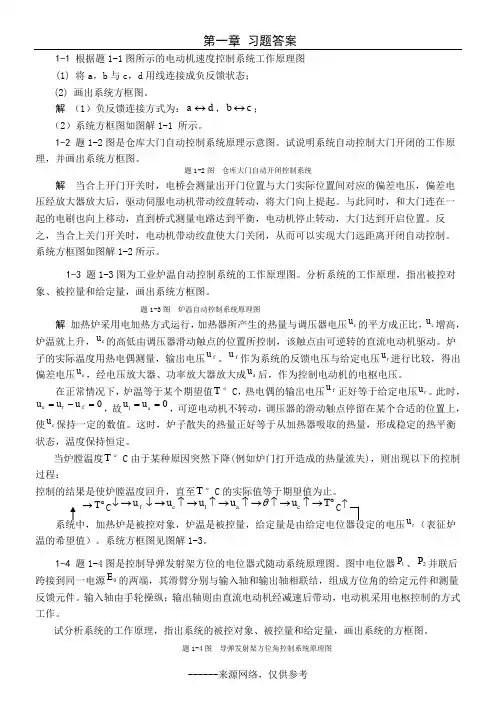
第一章 习题答案1-1 根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:d a ↔,c b ↔;(2)系统方框图如图解1-1 所示。
1-2 题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电解 c u 增高,偏差电压 r 。
此时,-=r e u u 使c u 过程:系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。
系统方框图见图解1-3。
1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器1P 、2P 并联后跨接到同一电源0E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
题1-4图 导弹发射架方位角控制系统原理图解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器1P 的滑臂转过一个输入角i θ的瞬间,由于输出轴的转角i o θθ≠,于是出现一个误差角o i e θθθ-=,该误差角通过电位器1P 、2P 转换成偏差电压o i e u u u -=,e u 经放大后驱动电动机转动,在驱动导弹发射架转动的同时,通过输出轴带动电位器2P 的滑臂转过一定的角度o θ,直至i o θθ=时,o i u u =,偏差电压0=e u ,电动机停止转动。
这时,导弹发射架停留在相应的方位角上。
只要o i θθ≠,偏差就会产生调节作用,控制的结果是消除偏差e θ,使输出量o θ严格地跟随输入量i θ的变化而变化。

第一章部分习题解答1.设z 1,z 2,z 3三点适合条件:0321=++z z z ,1321===z z z 。
证明z 1,z 2,z 3是内接于单位圆1=z 的一个正三角形的顶点。
证 由于1321===z z z ,知321z z z Δ的三个顶点均在单位圆上。
因为 33331z z z ==()[]()[]212322112121z z z z z z z z z z z z +++=+−+−=21212z z z z ++=所以, 12121−=+z z z z ,又 )())((122122112121221z z z z z z z z z z z z z z +−+=−−=−()322121=+−=z z z z故 321=−z z ,同理33231=−=−z z z z ,知321z z z Δ是内接于单位圆1=z 的一个正三角形。
2.证明:z 平面上的直线方程可以写成C z a z a =+(a 是非零复常数,C 是实常数) 证 设直角坐标系的平面方程为C By Ax =+将)(i 21Im ),(21Re z z z y z z z x −==+==代入,得C z B A z B A =−+−)i (21)i (21令)i (21B A a +=,则)i (21B A a −=,上式即为C z a z a =+。
3.求下列方程(t 是实参数)给出的曲线。
(1)t z i)1(+=; (2)t b t a z sin i cos +=;(3)t t z i+=; (4)22it t z +=,解(1)⎩⎨⎧∞<<−∞==⇔+=+=t t y tx t y x z ,)i 1(i 。
即直线x y =。
(2)π20,sin cos sin i cos i ≤<⎩⎨⎧==⇔+=+=t t b y ta x tb t a y x z ,即为椭圆12222=+b y a x ;(3)⎪⎩⎪⎨⎧==⇔+=+=t y t x t t y x z 1ii ,即为双曲线1=xy ; (4)⎪⎩⎪⎨⎧==⇔+=+=22221ii t y t x t t y x z ,即为双曲线1=xy 中位于第一象限中的一支。

物理初二第一章练习题答案1. 速度和加速度的关系根据物理学的基本概念,速度是物体运动的一个重要参量,而加速度则表示物体速度变化的快慢。
在初二的物理学习中,我们常常需要研究速度和加速度之间的关系。
以下是第一章练习题的答案:题目1:一个从静止开始的物体以恒定的加速度3 m/s²沿着一条直线运动,求它在5秒后的速度是多少?答案:根据物理学中的加速度公式v = u + at,其中v是末速度,u是初速度,a是加速度,t是时间。
给定初速度u=0,加速度a=3 m/s²,时间t=5秒。
代入公式计算可得v = 0 + 3 × 5 = 15 m/s。
题目2:一辆汽车在道路上以25 m/s的速度匀速行驶,经过10秒后它的位置是多少?答案:根据物理学中的位移公式s = ut,其中s是位移,u是速度,t 是时间。
给定速度u=25 m/s,时间t=10秒。
代入公式计算可得s = 25 ×10 = 250 m。
题目3:一个物体的速度从10 m/s增加到20 m/s,经过2秒的时间,求它的加速度是多少?答案:根据物理学中的加速度公式a = (v - u) / t,其中a是加速度,v是末速度,u是初速度,t是时间。
给定初速度u=10 m/s,末速度v=20 m/s,时间t=2秒。
代入公式计算可得a = (20 - 10) / 2 = 5 m/s²。
2. 动量守恒定律在物理学中,动量守恒定律是一个重要的原理,它指出在一个系统内,所有物体的总动量在没有外力作用的情况下保持不变。
以下是第一章练习题中涉及到动量守恒定律的答案:题目1:一辆质量为1000 kg的小轿车以20 m/s的速度向东行驶,和一辆质量为1500 kg的卡车以15 m/s的速度向东行驶发生碰撞,碰撞后两车结合在一起,求结合后的速度是多少?答案:根据动量守恒定律,碰撞前的总动量等于碰撞后的总动量。
小轿车的动量为mv1,卡车的动量为mv2,碰撞后的总动量为(m1 +m2)v。
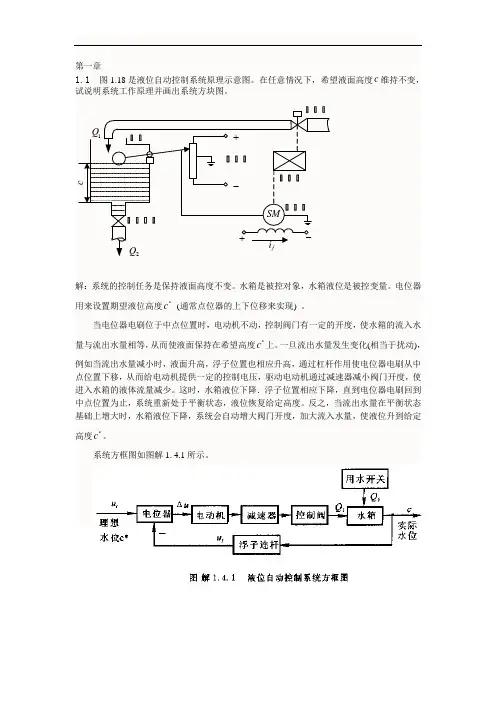
第一章1.1 图1.18是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
c+-SM___ 1Q浮浮浮浮浮浮2Q浮浮浮浮浮浮浮浮浮浮浮浮fi-+解:系统的控制任务是保持液面高度不变。
水箱是被控对象,水箱液位是被控变量。
电位器用来设置期望液位高度*c(通常点位器的上下位移来实现) 。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水量与流出水量相等,从而使液面保持在希望高度*c上。
一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定高度*c。
系统方框图如图解1. 4.1所示。
1.2恒温箱的温度自动控制系统如图1.19所示。
(1) 画出系统的方框图;(2) 简述保持恒温箱温度恒定的工作原理;(3) 指出该控制系统的被控对象和被控变量分别是什么。
M放大器电机减速器调压器 220~热电偶电阻丝- +- +图1.19 恒温箱的温度自动控制系统解:恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增高,炉温就上升。
调压器电压由其滑动触点位置所控制,滑臂则由伺服电动机驱动.炉子的实际温度用热电偶测量,输出电压作为反馈电压与给定电压进行比较,得出的偏差电压经放大器放大后,驱动电动机经减速器调节调压器的电压。
在正常情况下,炉温等于期望温度T ,热电偶的输出电压等于给定电压。
此时偏差为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。
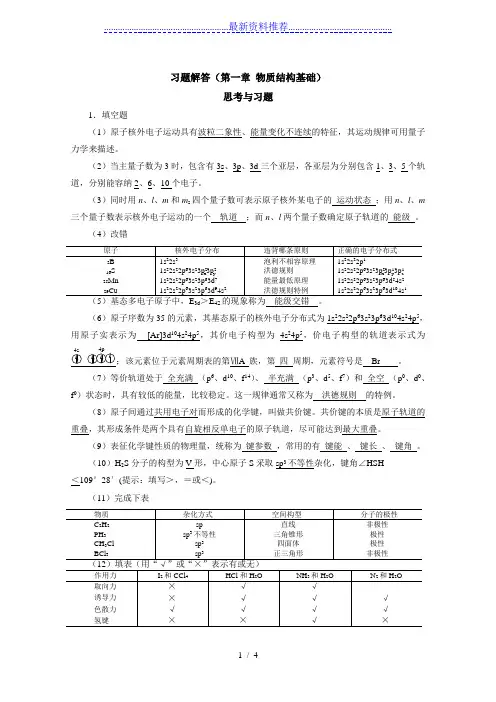
习题解答(第一章物质结构基础)思考与习题1.填空题(1)原子核外电子运动具有波粒二象性、能量变化不连续的特征,其运动规律可用量子力学来描述。
(2)当主量子数为3时,包含有3s、3p、3d三个亚层,各亚层为分别包含1、3、5个轨道,分别能容纳2、6、10个电子。
(3)同时用n、l、m和m s四个量子数可表示原子核外某电子的运动状态;用n、l、m 三个量子数表示核外电子运动的一个轨道;而n、l两个量子数确定原子轨道的能级。
(4)改错的现象称为能级交错。
3d4S(6)原子序数为35的元素,其基态原子的核外电子分布式为1s22s22p63s23p63d104s24p5,用原子实表示为[Ar]3d104s24p5,其价电子构型为4s24p5,价电子构型的轨道表示式为;该元素位于元素周期表的第ⅦA 族,第四周期,元素符号是Br 。
(7)等价轨道处于全充满(p6、d10、f14)、半充满(p3、d5、f7)和全空(p0、d0、f0)状态时,具有较低的能量,比较稳定。
这一规律通常又称为洪德规则的特例。
(8)原子间通过共用电子对而形成的化学键,叫做共价键。
共价键的本质是原子轨道的重叠,其形成条件是两个具有自旋相反单电子的原子轨道,尽可能达到最大重叠。
(9)表征化学键性质的物理量,统称为键参数,常用的有键能、键长、键角。
(10)H2S分子的构型为V形,中心原子S采取sp3不等性杂化,键角∠HSH<109°28′(提示:填写>,=或<)。
(11)完成下表2.选择题(1)下列原子轨道中,属于等价轨道的一组是( C )。
A .2s ,3sB .2p x ,3p xC .2p x ,2p yD .3d xy ,4d xy(2)下列用一套量子数表示的电子运动状态中,能量最高的是( B )。
A .4,1,-1,-12B .4,2,0,-12C .4,0,0,+12D .3,1,1,+12(3)下列不存在的能级是( C )。
《一元函数微积分》 习题1—11.确定下列函数的定义域: (1)912-=x y ;解:要使函数有意义,则:092>-x 即 3>x 或3-<x .所以函数定义域:),3()3,(+∞⋃--∞.(2)x y a arcsin log =;解:要使函数有意义,则0arcsin >x ,即10≤<x .所以函数定义域:(0,1]. (3)2111x x y --+=; 解:01012≠+≥-x x 且,即111-≠≤≤-x x 且.所以函数定义域:(-1,1].(4))32(log 213-+-=x x y a ; 解:03202>-≠-x x 且,即232>≠x x 且.所以函数定义域:),2()2,23(+∞⋃. (5))4(log 21arccos 2x x y a -+-=; 解:0412112>-≤-≤-x x 且,则2231<<-≤≤-x x 且。
所以函数定义域:)2,1[- (6)xy πsin 1=.解:0sin ≠x π,则Z k k x ∈≠,.(其中是Z 整数集),函数定义域:_Z 或}{Z k k x x ∈≠,.2.求函数⎪⎩⎪⎨⎧=≠=000,1sin x x xy 的定义域和值域,并求⎪⎭⎫⎝⎛π2f 和)0(f . 解:定义域:),(+∞-∞. 当0≠x 时,01≠x ,故11sin 1≤≤-x. 所以值域:[-1,1]. 12sin )2(==ππf ,0)0(=f .3.下列各题中,函数)(x f 和)(x g 是否相同,为什么? (1) 2)(,)(x x g x x f ==;解: 不同 因为||)(2x x x g ==,即)(x g 的值域是全体非负实数,而)(x f 的值域是全体实数.(2) 2sin 21)(,cos )(2x x g x x f -==; 解: 相同因为)(x f 和)(x g 的定义域均为实数R ,值域为[-1,1],且)(cos 2sin21)(2x f x xx g ==-= (3)1)(,11)(2-=+-=x x g x x x f ; 解: 不同因为)1(111)(2≠-=+-=x x x x x f .两函数的定义域不同. (4)0)(,)(x x g xxx f ==. 解: 相同因为)0(1)(),0(1)(0≠==≠==x x x g x xxx f 定义域均为非零实数,在定义域内函数值恒等于1.4.设x x f sin )(=, 证明:)2cos(2sin2)()(x x x x f x x f ∆+∆=-∆+. 证明: 由三角函数知:)2cos(2sin 2sin )sin()()(xx x x x x x f x x f ∆+∆=-∆+=-∆+.5.设5)(2++=bx ax x f 且38)()1(+=-+x x f x f ,试确定a , b 的值.解: 因为 5)(2++=bx ax x f故)5()2(5)1()1()1(22+++++=++++=+b a x b a ax x b x a x f 由题设3852)()1(+=++=-+x a ax x f x f 所以有:82=a 且3=+b a 得:1,4-==b a .6.下列函数哪些是偶函数? 哪些是奇函数?哪些既非奇函数又非偶函数? (1) )1(22x x y -=; 解: 定义域:),(+∞-∞)()1(])(1[)()(2222x f x x x x x f =-=---=-所以函数是偶函数. (2)323x x y -=; 解: 定义域:),(+∞-∞32323)()(3)(x x x x x f +=---=-,)()(x f x f ≠-且)()(x f x f -≠-.所以函数既非奇函数又非偶函数.(3)2211x x y +-=;解: 定义域:),(+∞-∞)(11)(1)(1)(2222x f xx x x x f =+-=-+--=- 所以函数是偶函数. (4))1)(1(+-=x x x y 解: 定义域:),(+∞-∞x x x x x x f -=+-=3)1)(1()(,)()()()(33x f x x x x x f -=+-=---=-.所以函数是奇函数. (5)1cos sin +-=x x y ; 解: 定义域:),(+∞-∞1cos sin 1)cos()sin()(+--=+---=-x x x x x f ,则)()(x f x f ≠-且)()(x f x f -≠-所以函数既非奇函数又非偶函数.(6)2xx a a y -+=.解: 定义域:),(+∞-∞)(2)(x f a a x f xx =+=--所以函数是偶函数.7.设)(x f 为定义在),(+∞-∞上的任意函数,证明:(1))()()(1x f x f x F -+=为偶函数; (2) )()()(2x f x f x F --=为奇函数.证明: 由题设)(x f 为定义在),(+∞-∞的函数, 则)(),(21x F x F 的定义域也为),(+∞-∞ (1) )()()()()()()(111x F x f x f x F x f x f x F =+-=-⇒-+= ,. 故)(1x F 是偶函数. (2) )()()()()()()(222x F x f x f x F x f x f x F -=--=-⇒--= ,.故)(2x F 为奇函数.8. 证明: 定义在),(+∞-∞上的任意函数可以表示为一个奇函数与一个偶函数和. 证明: 设)(x f 是定义在),(+∞-∞上的任意函数.由7题知 )()()(1x f x f x F -+=为偶函数,)()()(2x f x f x F --=为奇函数. 且 )(21)(21)(21x F x F x f +=. 故命题成立.9. 设)(x f 为定义在),(L L -上的奇函数,若)(x f 在),0(L 上单增, 证明: )(x f 在)0,(L -上也单增.证明: 由题设知对于任意),(L L x -∈有:)()(x f x f -=-不妨设任意的1x ,2x 满足021<<<-x x L , 则012>-<->x x L .)(x f 在),0(L 上单增, 则)()(21x f x f ->- ,)(x f 奇函数)()(),()(2211x f x f x f x f -=--=-∴即 )()(21x f x f ->- )()(21x f x f < 所以)(x f 在)0,(L -上也单增.10. 下列各函数中哪些是周期函数? 对于周期函数,指出其周期: (1) )2cos(-=x y ;解:)2cos()22cos(-=+-x x π, 函数是周期函数且周期π2=T . (2) x y 4cos =; 解: x x x 4cos )24cos()2(4cos =+=+ππ, 函数是周期函数且周期2π=T .(3) x y πsin 1+=;解: )2(sin 1)2sin(1sin 1++=++=+x x x ππππ,函数是周期函数且周期2=T . (4) x x y cos =; 解: 非周期函数 (5) x y 2sin =; 解: )](2cos 1[21)]22cos(1[21)2cos 1(21sin 2ππ+-=+-=-=x x x x , 函数是周期函数且周期π=T . (6) x x y tan 3sin +=解: )32(3sin )23sin(3sin ππ+=+=x x x , )tan(tan π+=x x ,故原函数的周期为两函数x x tan ,3sin 的周期π32和π最小公倍数. 所以周期为π2=T .11. 下列各组函数中哪些不构成复合函数? 把能构成复合函数的写,成复合函数,并指出定义域. (1) 3x y =,t x sin =;解: 构成复合函数t y 3sin =, 定义域: ),(+∞-∞. (2) ua y =,2x u =;解: 构成复合函数2x a y =, 定义域: ),(+∞-∞. (3) u y a log =,232+=x u ;解: 构成复合函数)22(log 2+=x y a , 定义域: ),(+∞-∞. (4) u y =,2sin -=x u ;解: 不构成复合函数u y =要求0≥u , 但是2sin -=x u 的值域:]1,3[--. (5) u y =,3x u =; 解: 构成复合函数3x y =, 定义域: ),0[+∞.(6) u y a log =, 22-=x u .解: 构成复合函数)2(log 2-=x y a , 定义域: ),2()2,(+∞⋃--∞.12. 下列函数是由哪些简单函数复合而成的?(1) 321)1(++=x y ;解: 3u y =,1)1(2++=x u . (2) 2)1(ln 3+=x y ;解: u y 3=, 2v u =, 1ln +=x v .(3) )13(sin 3+=x y ;解: 3u y =, v u sin =, 13+=x v . (4) 32cos log x y a =.解: 3u y =, v u a log =, 2w v =, x w cos =.13. 求下列函数的反函数: (1) x y sin 2=;]2,2[ππ-∈x 解: 原函数的定义域:]2,2[ππ-∈x , 值域:]2,2[-. 反解: 2arcsin yx =. 得反函数: 2arcsinx y =. (2) )2(log 1++=x y a ;解: 原函数的定义域: ),2(+∞-, 值域:),(+∞-∞. 反解: 21-=-y a x .得反函数: 21-=-x ay反函数的定义域),(+∞-∞:, 值域: ),2(+∞-.(3) 122+=x xy .解: 121112112122+-=+-+=+=xx x x x y 由于112>+x, 则11210<+<x . 原函数的定义域: ),(+∞-∞, 值域:.)1,0( 反解: yy x-=12, y y x -=1log 2.得反函数: xx y -=1log 2反函数的定义域: )1,0(, 值域: ),(+∞-∞.14. 某批发商店按照下列价格表整盒在批发销售某种盒装饮料:当购货量小于或等于20盒时,每盒2.50元;当购货量小于或等于50盒时,其超过20盒的饮料每盒2.30元; 当购货量小于或等于100盒时,其超过50盒的饮料每盒2.00元; 当购货量大于100时,其超过100盒的饮料每盒1.80元;设x 是销售量, y 是总价, 试建立总价y 和销售量x 之间的函数关系式,并作出它的图形. 解: 由题知: 当200≤≤x 时, x y 5.2=;当5020≤<x 时, 43.2)20(3.2205.2+=-+⨯=x x y ;当10050≤<x 时, 192)50(2)2050(3.2205.2+=-+-⨯+⨯=x x y ; 当100>x 时, 398.1)100(8.1219+=-+=x x y⎪⎪⎩⎪⎪⎨⎧>+≤<+≤<+≤≤=100398.110050192502043.22005.2x x x x x x x xy 图形(略)15. 设某商品的市场供应函数p p S Q 480)(+-==, 其中Q 为供应量, p 为市场价格. 商品的单位生产成本是1.5元, 试建立总利润L 与市场价格p 的函数关系式. 解: 供应函数p p S Q 480)(+-==则总利润120864)480)(5.1()5.1(2+-=+--=-=p p p p Q p L .16. 用p 代表单价, 某商品的需求函数为p p D Q 500007)(-==, 当Q 超过1 000时成本函数为Q C 2500020+=, 试确定能达到损益平衡的价格 (提示: 当总收入=总成本时,便达到损益平衡).解: 当1000>Q 时 1000500007)(>-==p p D Q 则价格120<p . 达到损益平衡, 则 C pQ =即: )500007(25000202500020)500007(p Q p p -+=+=-039001652=+-p p得282.107165±=p又因为价格120<p , 故59.28=p答: 当需求量超过1000时,达到损益平衡的价格是28.59.17. 在半径为r 的球内嵌入一个内接圆柱, 试将圆柱的体积V 表示为圆柱的高h 的函数, 并求此函数的定义域.解: 设圆柱的半径为R, 则满足4)2(22222h r h r R -=-=圆柱的体积: 3222241)4(h h r h h r h R V ππππ-=-==. 定义域: )2,0(r18. 已知华氏温度F 与摄氏温度℃的线性关系, 在101325帕(一个标准大气压)下, 水的冰点温度不32F 或0℃, 水的沸点温度为212F 或100℃.(1) 写出华氏温度F 与摄氏温度℃的函数关系; (2) 画出该函数的图形;(3) 摄氏20℃相当于华氏几度?解: (1)由华氏温度F 与摄氏温度℃的线性关系, 设当摄氏温度为x ℃时, 华氏温度为y F , 则有关系式 b ax y += 其中a , b 为常数. 由题知:⎩⎨⎧==⇒⎩⎨⎧+=+⋅=328.1100212032b a b a b a 函数关系: 328.1+=x y (其中x 的度量单位是℃, y 的度量单位是F) (2) 函数图形(略)(3) 摄氏20℃时, y =1.8⨯20℃+32=68(F) 习题1-2 1.(1)0;(2)1;(3)-1;(4)发散 2.(1)证明:0>∀ε,要使ε<=-+nn 1111,即ε1>n 。
完整版高等代数习题解答(第一章)高等代数题解答第一章多项式补充题1.当a,b,c取何值时,多项式f(x)=x-5与g(x)=a(x-2)^2+b(x+1)+c(x^2-x+2)相等?提示:比较系数得a=-1,b=-1,c=6.补充题2.设f(x),g(x),h(x)∈[x],f^2(x)=xg^2(x)+x^3h^2(x),证明:假设f(x)=g(x)=h(x)不成立。
若f(x)≠0,则∂(f^2(x))为偶数,又g^2(x),h^2(x)等于或次数为偶数,由于g^2(x),h^2(x)∈[x],首项系数(如果有的话)为正数,从而xg^2(x)+x^3h^2(x)等于或次数为奇数,矛盾。
若g(x)≠0或h(x)≠0,则∂(xg^2(x)+x^3h^2(x))为奇数,而f^2(x)为偶数,矛盾。
综上所证,f(x)≠g(x)或f(x)≠h(x)。
1.用g(x)除f(x),求商q(x)与余式r(x):1)f(x) =x^3-3x^2-x-1,g(x) =3x^2-2x+1;2)f(x) =x^4-2x+5,g(x) =x^2-x+2.1)解法一:待定系数法。
由于f(x)是首项系数为1的3次多项式,而g(x)是首项系数为3的2次多项式,所以商q(x)必是首项系数为1的1次多项式,而余式的次数小于2.于是可设q(x)=x+a,r(x)=bx+c。
根据f(x)=q(x)g(x)+r(x),即x^3-3x^2-x-1=(x+a)(3x^2-2x+1)+bx+c,右边展开,合并同类项,再比较两边同次幂的系数,得a=-1/3,b=-2/3,c=-1,故得q(x)=x-1/3,r(x)=-x-1/3.2)解法二:带余除法。
用长除法得商q(x)=x^2+x-1,余式r(x)=-5x+7.2.m,p,q适合什么条件时,有1)x^2+mx-1/x^3+px+q;2)x^2+mx+1/x^4+px^2+q.解:1)将x^3+px+q除以x^2+mx-1得商为x+m+1/(x+m-1),所以当m≠1时有解。
第一章习题解答1.1 物质的体膨胀系数αV与等温压缩率κT的定义如下:试导出理想气体的、与压力、温度的关系解:对于理想气体:PV=nRT , V= nRT/P求偏导:1.2 气柜储存有121.6kPa,27℃的氯乙烯(C2H3Cl)气体300m3,若以每小时90kg的流量输往使用车间,试问储存的气体能用多少小时?解:将氯乙烯(M w=62.5g/mol)看成理想气体:PV=nRT , n= PV/RT n=121600⨯300/8.314⨯300.13 (mol)=14618.6molm=14618.6⨯62.5/1000(kg)=913.66 kgt=972.138/90(hr)=10.15hr1.3 0℃,101.325kPa的条件常称为气体的标准状况,试求甲烷在标准状况下的密度?解:将甲烷(M w=16g/mol)看成理想气体:PV=nRT , PV =mRT/ M w甲烷在标准状况下的密度为=m/V= PM w/RT=101.325⨯16/8.314⨯273.15(kg/m3)=0.714 kg/m31.4 一抽成真空的球形容器,质量为25.0000g。
充以4℃水之后,总质量为125.0000g。
若改充以25℃,13.33kPa的某碳氢化合物气体,则总质量为25.0163g。
试估算该气体的摩尔质量。
水的密度按1 g.cm-3计算。
(答案来源:)解:球形容器的体积为V=(125-25)g/1 g.cm-3=100 cm3将某碳氢化合物看成理想气体:PV=nRT , PV =mRT/ M wM w= mRT/ PV=(25.0163-25.0000)⨯8.314⨯300.15/(13330⨯100⨯10-6) M w =30.51(g/mol)1.5 两个容器均为V的玻璃球之间用细管连接,泡内密封着标准状况下的空气。
若将其中一个球加热到100℃,另一个球则维持0℃,忽略连接细管中的气体体积,试求该容器内空气的压力。