蚁群算法研究综述(附视频)
- 格式:ppt
- 大小:2.91 MB
- 文档页数:24
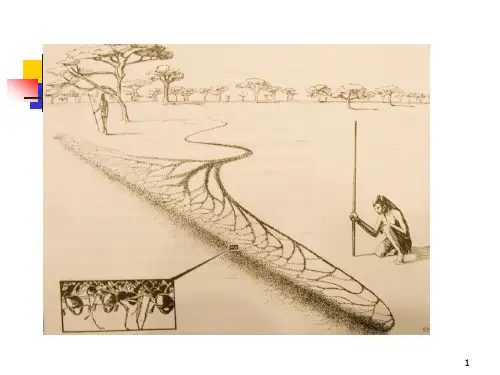
蚁群算法综述控制理论与控制工程09104046 吕坤一、蚁群算法的研究背景蚂蚁是一种最古老的社会性昆虫,数以百万亿计的蚂蚁几乎占据了地球上每一片适于居住的土地,它们的个体结构和行为虽然很简单,但由这些个体所构成的蚁群却表现出高度结构化的社会组织,作为这种组织的结果表现出它们所构成的群体能完成远远超越其单只蚂蚁能力的复杂任务。
就是他们这看似简单,其实有着高度协调、分工、合作的行为,打开了仿生优化领域的新局面。
从蚁群群体寻找最短路径觅食行为受到启发,根据模拟蚂蚁的觅食、任务分配和构造墓地等群体智能行为,意大利学者M.Dorigo等人1991年提出了一种模拟自然界蚁群行为的模拟进化算法——人工蚁群算法,简称蚁群算法(Ant Colony Algorithm,ACA)。
二、蚁群算法的研究发展现状国内对蚁群算法的研究直到上世纪末才拉开序幕,目前国内学者对蚁群算法的研究主要是集中在算法的改进和应用上。
吴庆洪和张纪会等通过向基本蚁群算法中引入变异机制,充分利用2-交换法简洁高效的特点,提出了具有变异特征的蚊群算法。
吴斌和史忠植首先在蚊群算法的基础上提出了相遇算法,提高了蚂蚁一次周游的质量,然后将相遇算法与采用并行策略的分段算法相结合。
提出一种基于蚁群算法的TSP问题分段求解算法。
王颖和谢剑英通过自适应的改变算法的挥发度等系数,提出一种自适应的蚁群算法以克服陷于局部最小的缺点。
覃刚力和杨家本根据人工蚂蚁所获得的解的情况,动态地调整路径上的信息素,提出了自适应调整信息素的蚁群算法。
熊伟清和余舜杰等从改进蚂蚁路径的选择策略以及全局修正蚁群信息量入手,引入变异保持种群多样性,引入蚁群分工的思想,构成一种具有分工的自适应蚁群算法。
张徐亮、张晋斌和庄昌文等将协同机制引入基本蚁群算法中,分别构成了一种基于协同学习机制的蚁群算法和一种基于协同学习机制的增强蚊群算法。
随着人们对蚁群算法研究的不断深入,近年来M.Dorigo等人提出了蚁群优化元启发式(Ant-Colony optimization Meta Heuristic,简称ACO-MA)这一求解复杂问题的通用框架。

第一章绪论1。
1选题的背景和意义受社会性昆虫行为的启发,计算机工作者通过对社会性昆虫的模拟产生了一系列对于传统问题的新的解决方法,这些研究就是群体智能的研究。
群体智能作为一个新兴领域自从20世纪80年代出现以来引起了多个学科领域研究人员的关注,已经成为人工智能以及经济社会生物等交叉学科的热点和前沿领域。
群体智能(Swarm Intelligence)中的群体(Swarm)指的是“一组相互之间可以进行直接通信或者间接通信(通过改变局部环境)的主体,这组主体能够合作进行分布问题求解,群体智能指的是无智能或者仅具有相对简单智能的主体通过合作表现出更高智能行为的特性;其中的个体并非绝对的无智能或只具有简单智能,而是与群体表现出来的智能相对而言的。
当一群个体相互合作或竞争时,一些以前不存在于任何单独个体的智慧和行为会很快出现。
群体智能的提出由来已久,人们很早以前就发现,在自然界中,有的生物依靠其个体的智慧得以生存,有的生物却能依靠群体的力量获得优势。
在这些群体生物中,单个个体没有很高的智能,但个体之间可以分工合作、相互协调,完成复杂的任务,表现出比较高的智能。
它们具有高度的自组织、自适应性,并表现出非线性、涌现的系统特征。
群体中相互合作的个体是分布式的,这样更能够适应当前网络环境下的工作状态;没有中心的控制与数据,这样的系统更具有鲁棒性,不会由于某一个或者某几个个体的故障而影响整个问题的求解。
可以不通过个体之间直接通信而是通过非直接通信进行合作,这样的系统具有更好的可扩充性。
由于系统中个体的增加而增加的系统的通信开销在这里十分小.系统中每个个体的能力十分简单,这样每个个体的执行时间比较短,并且实现也比较简单,具有简单性。
因为具有这些优点,虽说群集智能的研究还处于初级阶段,并且存在许多困难,但是可以预言群集智能的研究代表了以后计算机研究发展的一个重要方向。
随着计算机技术的飞速发展,智能计算方法的应用领域也越来越广泛,当前存在的一些群体智能算法有人工神经网络,遗传算法,模拟退火算法,群集智能,蚁群算法,粒子群算等等。


蚁群算法综述智能控制之蚁群算法1引言进入21世纪以来,随着信息技术的发展,许多新方法和技术进入工程化、产品化阶段,这对自动控制技术提出新的挑战,促进了智能理论在控制技术中的应用,以解决用传统的方法难以解决的复杂系统的控制问题。
随着计算机技术的飞速发展,智能计算方法的应用领域也越来越广泛。
智能控制技术的主要方法有模糊控制、基于知识的专家控制、神经网络控制和集成智能控制等,以及常用优化算法有:遗传算法、蚁群算法、免疫算法等。
蚁群算法是近些年来迅速发展起来的,并得到广泛应用的一种新型模拟进化优化算法。
研究表明该算法具有并行性,鲁棒性等优良性质。
它广泛应用于求解组合优化问题,所以本文着重介绍了这种智能计算方法,即蚁群算法,阐述了其工作原理和特点,同时对蚁群算法的前景进行了展望。
2 蚁群算法概述1、起源蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型技术。
它由Marco Dorigo于1992年在他的博士论文中引入,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。
Deneubourg及其同事(Deneubourg et al.,1990; Goss et al.,1989)在可监控实验条件下研究了蚂蚁的觅食行为,实验结果显示这些蚂蚁可以通过使用一种称为信息素的化学物质来标记走过的路径,从而找出从蚁穴到食物源之间的最短路径。
在蚂蚁寻找食物的实验中发现,信息素的蒸发速度相对于蚁群收敛到最短路径所需的时间来说过于缓慢,因此在模型构建时,可以忽略信息素的蒸发。
然而当考虑的对象是人工蚂蚁时,情况就不同了。
实验结果显示,对于双桥模型和扩展双桥模型这些简单的连接图来说,同样不需要考虑信息素的蒸发。
相反,在更复杂的连接图上,对于最小成本路径问题来说,信息素的蒸发可以提高算法找到好解的性能。
2、基于蚁群算法的机制原理模拟蚂蚁群体觅食行为的蚁群算法是作为一种新的计算智能模式引入的,该算法基于如下假设:(1)蚂蚁之间通过信息素和环境进行通信。
蚁群算法在移动机器人路径规划中的应用综述一、本文概述随着和机器人技术的快速发展,移动机器人的路径规划问题已成为研究热点。
路径规划是指在有障碍物的环境中寻找一条从起点到终点的安全、有效路径。
蚁群算法作为一种模拟自然界蚁群觅食行为的智能优化算法,因其出色的全局搜索能力和鲁棒性,在移动机器人路径规划领域得到了广泛应用。
本文旨在综述蚁群算法在移动机器人路径规划中的研究现状、应用实例以及未来发展趋势,以期为相关领域的研究者提供参考和借鉴。
本文首先介绍蚁群算法的基本原理和特点,然后分析其在移动机器人路径规划中的适用性。
接着,详细梳理蚁群算法在移动机器人路径规划中的应用案例,包括室内环境、室外环境以及复杂动态环境等不同场景下的应用。
本文还将讨论蚁群算法在路径规划中的优化策略,如参数调整、算法融合等。
总结蚁群算法在移动机器人路径规划中的优势与不足,并展望其未来的研究方向和发展趋势。
二、蚁群算法基本原理蚁群算法(Ant Colony Optimization, ACO)是一种模拟自然界蚂蚁觅食行为的优化算法,由意大利学者Marco Dorigo等人在1991年首次提出。
蚁群算法的基本原理是模拟蚂蚁在寻找食物过程中,通过信息素(pheromone)的释放和跟随来进行路径选择,最终找到从蚁穴到食物源的最短路径。
在算法中,每个蚂蚁都被视为一个智能体,能够在搜索空间中独立探索和选择路径。
蚁群算法的核心在于信息素的更新和挥发机制。
蚂蚁在选择路径时,会倾向于选择信息素浓度较高的路径,因为这意味着这条路径更可能是通向食物源的有效路径。
同时,蚂蚁在行走过程中会释放信息素,使得走过的路径上信息素浓度增加。
然而,随着时间的推移,信息素会逐渐挥发,这是为了避免算法陷入局部最优解。
在移动机器人路径规划问题中,蚁群算法可以被用来寻找从起点到终点的最优或近似最优路径。
将搜索空间映射为二维或三维的网格,每个网格节点代表一个可能的移动位置,而路径则由一系列节点组成。
蚁群算法概述
蚁群算法(Ant Colony Optimization,ACO)是一种基于自然界中蚂蚁行为的模拟算法,它是一种迭代搜索算法,其基本思想是模拟蚂蚁寻路的行为来解决复杂的最优化问题。
蚁群算法通过模拟蚂蚁在解决问题时的行为,即蚂蚁在搜索最优路径时会在路径上留下一种信息素,当其他蚂蚁经过这条路径时会嗅到这种信息素,并且会被吸引,最终聚集到最优路径上。
蚁群算法的优势在于:
1. 具有良好的全局搜索能力,可以有效地搜索出最优解;
2. 算法简单,实现起来比较容易;
3. 可以针对不同的问题采用不同的参数设置,从而提高算法的灵活性和可扩展性;
4. 算法不易陷入局部最优解,收敛速度较快。
《智能计算—蚁群算法基本综述》班级:研1102班专业:计算数学姓名:刘鑫学号:11070100362012年蚁群算法基本综述刘鑫(西安理工大学理学院,研1102班,西安市,710054)摘要:蚁群算法( ACA)是一种广泛应用于优化领域的仿生进化算法。
ACA发展背景着手,分析比较国内外ACA研究团队与发展情况立足于基本原理,分析其数学模型,介绍了六种经典的改进模型,对其优缺点进行分析,简要总结其应用领域并对其今后的发展、应用做出展望。
关键词:蚁群;算法;优化;改进;应用0引言专家发现单个蚂蚁只具有一些简单的行为能力。
但整个蚁群却能完成一系列复杂的任务。
这种现象是通过高度组织协调完成的1991年。
意大利学者M.Dorigo 首次提出一种新型仿生算法ACA。
研究了蚂蚁的行为。
提出其基本原理及数学模型。
并将之应用于寻求旅行商问题(TSP)的解。
通过实验及相关理论证明,ACA有着有着优化的选择机制的本质。
而这种适应和协作机制使之具有良好的发现能力及其它算法所没有的优点。
如较强的鲁棒性、分布式计算、易与其他方法结合等;但同时也不应忽略其不足。
如搜索时间较长,若每步进行信息素更新,计算仿真时所占用CPU时间过长:若当前最优路径不是全局最优路径,但其信息素浓度过高时。
靠公式对信息素浓度的调整不能缓解这种现象。
会陷人局部收敛无法寻找到全局最优解:转移概率过大时,虽有较快的收敛速度,但会导致早熟收敛。
所以正反馈原理所引起的自催化现象意在强化性能好的解,却容易出现停滞现象。
笔者综述性地介绍了ACA对一些已有的提出自己的想法,并对其应用及发展前景提出了展望。
1 蚁群算法概述ACA源自于蚁群的觅食行为。
S.Goss的“双桥”实验说明蚂蚁总会选择距食物源较短的分支蚂蚁之间通过信息素进行信息的传递,捷径上的信息素越多,吸引的蚂蚁越多。
形成正反馈机制,达到一种协调化的高组织状态该行为称集体自催化目前研究的多为大规模征兵,即仅靠化学追踪的征兵。