有限元法与ANSYS技术-形函数的性质
- 格式:ppt
- 大小:331.50 KB
- 文档页数:10
有限元分析基本理论问答基础理论知识1. 诉述有限元法的定义答:有限元法是近似求解一般连续场问题的数值方法2. 有限元法的基本思想是什么答:首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。
3. 有限元法的分类和基本步骤有哪些答:分类:位移法、力法、混合法;步骤:结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。
4. 有限元法有哪些优缺点答:优点:有限元法可以模拟各种几何形状复杂的结构,得出其近似解;通过计算机程序,可以广泛地应用于各种场合;可以从其他CAD软件中导入建好的模型;数学处理比较方便,对复杂形状的结构也能适用;有限元法和优化设计方法相结合,以便发挥各自的优点。
缺点:有限元计算,尤其是复杂问题的分析计算,所耗费的计算时间、内存和磁盘空间等计算资源是相当惊人的。
对无限求解域问题没有较好的处理办法。
尽管现有的有限元软件多数使用了网络自适应技术,但在具体应用时,采用什么类型的单元、多大的网络密度等都要完全依赖适用者的经验。
5. ?梁单元和平面钢架结构单元的自由度由什么确定答:每个节点上有几个节点位移分量,就称每个节点有几个自由度6. ?简述单元刚度矩阵的性质和矩阵元素的物理意义答:单元刚度矩阵是描述单元节点力和节点位移之间关系的矩阵单元刚度矩阵中元素aml的物理意义为单元第L个节点位移分量等于1,其他节点位移分量等于0时,对应的第m个节点力分量。
7. 有限元法基本方程中的每一项的意义是什么答:整个结构的节点载荷列阵(外载荷、约束力),整个结构的节点位移列阵,结构的整体刚度矩阵,又称总刚度矩阵。
8. 位移边界条件和载荷边界条件的意义是什么答:由于刚度矩阵的线性相关性不能得到解,从而引入边界条件。
9. ?简述整体刚度矩阵的性质和特点答:对称性;奇异性;稀疏性;对角线上的元素恒为正。
关于ANSYS中单元类型与形函数及计算精度问题有限元计算中,单元类型的选择,最终归结为形函数(插值函数)的选择直接从理论上影响着分析的精度。
在ANSYS中,单元类型与形函数之间存在什么关系呢?通过参考其理论手册发现,单元类型与形函数之间并不是一一对应关系,在某些情况下,一种单元类型在采用不同离散形式(例如体单元分别采用四面体,五面体和六面体)时对应不同的形函数(插值函数)。
以下针对常用的几种体单元对单元类型与形函数之间的关系作一简单说明,便于以后在分析问题时根据工程需要采用不同的单元类型及形函数。
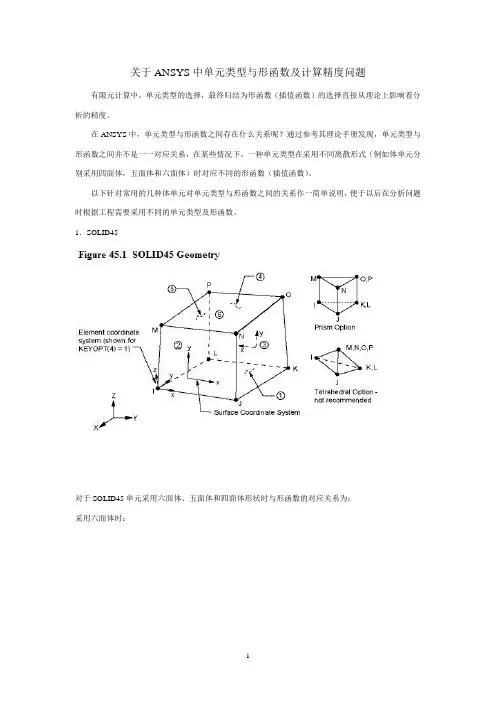
1.SOLID45
对于SOLID45单元采用六面体、五面体和四面体形状时与形函数的对应关系为:
采用六面体时:
五面体时:
四面体时:
从六面体到四面体,虽然都采用的是SOLID45,但其对应的形函数阶次依次降低,因而在同等计算规模下计算精度也依次降低。
当采用四面体离散时,相应形函数对应的单元退化为常应变四面体单元,要准确模拟则需要相当数量的单元方可。
同理对于SOLID95在采用不同形状离散时也分别对应不同的形函数。
当退化为四面体时,SOLID95和SOLID92(只具有四面体形式)采用相同的形函数(可参考理论手册):
因而从理论上来看,在采用相同数目的四面体单元进行离散时其计算结果应该是一致的。
以下为在ANSYS中对其进行的验证:
从图1、2中可以明显看出,采用相同形函数而不同单元类型离散后,计算结果是相同的。
图1 使用SOLID92计算结果
以上仅为本人一点见解,欢迎一起探讨。
Swifthorse1979@。
ANSYS结构分析基础篇一、总体介绍进行有限元分析的基本流程:1.分析前的思考1)采用哪种分析静态,模态,动态...2)模型是零件还是装配件零件可以form a part形成装配件,有时为了划分六面体网格采用零件,但零件间需定义bond接触3)单元类型选择线单元,面单元还是实体单元4)是否可以简化模型如镜像对称,轴对称2.预处理1)建立模型2)定义材料3)划分网格4)施加载荷及边界条件3.求解4.后处理1)查看结果位移,应力,应变,支反力2)根据标准规范评估结构的可靠性3)优化结构设计高阶篇:一、结构的离散化将结构或弹性体人为地划分成由有限个单元,并通过有限个节点相互连接的离散系统;这一步要解决以下几个方面的问题:1、选择一个适当的参考系,既要考虑到工程设计习惯,又要照顾到建立模型的方便;2、根据结构的特点,选择不同类型的单元;对复合结构可能同时用到多种类型的单元,此时还需要考虑不同类型单元的连接处理等问题;3、根据计算分析的精度、周期及费用等方面的要求,合理确定单元的尺寸和阶次;4、根据工程需要,确定分析类型和计算工况;要考虑参数区间及确定最危险工况等问题;5、根据结构的实际支撑情况及受载状态,确定各工况的边界约束和有效计算载荷;二、选择位移插值函数1、位移插值函数的要求在有限元法中通常选择多项式函数作为单元位移插值函数,并利用节点处的位移连续性条件,将位移插值函数整理成以下形函数矩阵与单元节点位移向量的乘积形式;位移插值函数需要满足相容协调条件,采用多项式形式的位移插值函数,这一条件始终可以满足;但近年来有人提出了一些新的位移插值函数,如:三角函数、样条函数及双曲函数等,此时需要检查是否满足相容条件;2、位移插值函数的收敛性完备性要求:1 位移插值函数必须包含常应变状态;2位移插值函数必须包含刚体位移;3、复杂单元形函数的构造对于高阶复杂单元,利用节点处的位移连续性条件求解形函数,实际上是不可行的;因此在实际应用中更多的情况下是利用形函数的性质来构造形函数;形函数的性质:1相关节点处的值为 1,不相关节点处的值为 0;2形函数之和恒等于 1;这里我们称为的相关节点, 为的相关节点,其它点均为不相关节点;三、单元分析目的:计算单元弹性应变能和外力虚功;使用最小势能原理,需要计算结构势能,由弹性应变能和外力虚功两部分构成;结构已经被离散,弹性应变能可以由单元弹性应变能叠加得到,外力虚功中的体力、面力都是分布在单元上的,也可以采用叠加计算;2、计算单元外力功从前面推导可以看出:单元弹性应变能可计算的部分只有单元刚度矩阵,单元外力虚功可计算的部分只有单元等效体力载荷向量和等效面力载荷向量;在实际分析时并不需要进行上述推导,只需要将假定的位移插值函数代入本节推导得出的单元刚度矩阵、等效体力载荷向量和等效面力载荷向量的计算公式即可;所以我们说有限元分析的第三步是计算单元刚度矩阵、等效体力载荷向量和等效面力载荷向量;几点说明:1单元刚度矩阵具有正定性、奇异性和对称性三各重要特性;所谓正定性指所有对角线元素都是正数,其物理意义是位移方向与载荷方向一致;奇异性是说单元刚度矩阵不满秩是奇异矩阵,其物理意义是单元含有刚体位移;对称性是说单元刚度矩阵是对称矩阵,程序设计时可以充分利用;2按照本节公式计算的单元等效体力载荷向量和等效面力载荷向量称为一致载荷向量;实际分析时有时也采用静力学原理计算单元等效体力载荷向量和等效面力载荷向量,实际应用表明在大多数情况下,这样做可以简化计算,同时又基本上不影响分析结果;二、预处理总述1、实体分析可是3D或2D,3D分析采用的高阶单元SOLID186或SOLID187划分的四面体TET 或六面体HEX单元,2D分析采用的高阶单元的三角形TRI或四边形QUA单元,2D分析时需要在创建项目时在GEOMETRY的分析类型项选择2D,实体分析得每个节点结构上只有3个自由度,如下图所示2、面体分析几何上是2D但离散元是3D,通常面体厚度给予赋值;面体网格划分采用壳单元,具有6个自由度;3、线体几何上是1D,离散元是3D,截面形状可通过line body进行设置,线体网格划分采用梁单元,具有6个自由度;4、同个part下的所有body共享相交边界,网格划分时共用交界上的节点,不需要设置接触;5、NameSelection的使用技巧,在model模块下,可点击右键insert NameSelection,一般Nameselection的选择方法可用几何选取,直接在模型上鼠标点选;另一种实用的选取方法为Worksheet,可以添加多种条件进行筛选,模型划分网格后,可以精确到对每个单元的选取;三、网格划分1、relevance选项控制网格的精度,值在-100到100间,越小越粗糙,越大越精密;relevance center 控制relevance中间点的精度,element size控制整个模型的最大单元尺寸;2、网格的高级尺寸控制a)接近度和曲度结合控制b)曲度c)邻近度d)固定尺寸曲度对于一些含曲线特征的几何体,可以控制其划分网格的精密度邻近度可以控制某个区域两个邻近的几何特征间的网格划分密度2、网格的高级选项形状检测:标准力学-线性分析、模态和热分析进阶力学-大变形分析、材料的非线性分析3、局部网格划分控制Method 选择Automatic 首先若能SWEEP则选用sweep划分HEX网格,否则选用patchconforming划分TET网格;四面体TET网格划分有两种方法:patchconforming和patch independent;对于不能通过sweep得到六面体的几何体可以选用Hex dominant或者Multizone划分方法4、尺寸控制Sizing可以通过element size单元最大尺寸、Number of divisions每个边的单元数量、Sphere of influence控制影响区,可设置影响半径来调节网格划分尺寸;Contact sizing可设置接触面的尺寸;5、其他设置element refinement可设置选择几何体的网格密度加密倍数;mapped face meshing 可设置映射面生成结构化网格;可通过side、corner、end点的定义来设置映射策略;inflation control设置膨胀层,主要用于流体分析的边界层划分;pinch 可以移出一些不必要的小的几何特征,划分网格时可以去掉一些小的凸起部分;划分网格前有个小圆台采用pinch划分网格后没有凸台Master选择蓝色线,Slave选择红色线,tolerance的值要比凸台的高度大;6、虚拟拓扑的应用虚拟拓扑有助于优化几何模型,可以合并面,分割面或边来提高网格划分质量;虚拟拓扑可以自动控制虚拟拓扑合并面虚拟拓扑分割边虚拟拓扑设置:behavior可以设置拓扑搜寻深度;7、子模型的应用当原几何模型较大,网格数量有限,为了对模型局部进行更精确的计算分析,可以采用子模型;子模型的一般创建方法:先对整体模型项目A进行分析计算,然后copy原项目得到项目B,对项目B中几何进行切割细化网格,将项目A的solution栏拖到Setup栏,最好在B项目求解设置下的submodeling 插入边界条件,子模型的切割边界应远离高应力区;四、静力学分析线弹性静力分析假设:a)各向同性线弹性材料b)小变形理论c)无时间、无阻尼效应1、point mass,质量点可以通过坐标或选择几何面、线、点加载在几何体上,质量点只受Acceleration,Standard earth gravity,Rotational velocity影响;2、求解设置可设置求解步数,定义每步的终止时间,静力分析中的time只是一个跟踪量求解器选择:自动,直接求解Direct,迭代求解Iterative弱弹簧的使用:为了满足静止约束,程序可自动添加弱弹簧,可以在结果中查看弱弹簧的反力,应该是一个很小的值,并不影响结构的应力分析;惯性释放:当物体受力不平衡产生加速度时,利用惯性释放可以产生一个惯性力进行静力分析,惯性释放只能用于线性结构分析;惯性释放下的应力:静力平衡下的应力3、施加载荷加速度、角速度、压力、力,静水压力模拟水压轴承力Bearing Load,施加在整个圆柱面上;remote force定义力的作用点螺栓预紧力Bolt Pretension施加在圆柱面上,可以定义预紧力或伸长量;Thermal condition,计算热应力,需要设置reference temperature4、施加约束Fix support 约束点、线、面的所有自由度;Displacement 位移约束Elastic Support 无摩擦的弹性支持面Frictionless Support,约束面的法向运动,作用在平面上等同于对称边界条件作用在圆柱面上约束径向运动cylindrical support 只作用在圆柱面上,可以设轴向,径向,切向三个自由度compression only support 基于罚函数方法对目标面建立一个刚性接触面simply supported 作用于点或边,面体或线体,约束所有平动除了转动自由度Fixed rotation 约束转动,放开平动nodal load and support 必须通过name selection 来选取nodetools-Solve process settings可以设置求解用的计算机CPU数五、接触基本设置接触是一种高度非线性特征,接触一般通过接触对描述,包括接触面contact和目标面target,程序一共有5种接触方式,其主要特征如下:Bonded 和 no separation 都是线性接触,bonded使两个接触面固定在一起,无间隙不能相对滑动而no separation 允许有较小的滑动,其他接触都是非线性;contact 接触行为behavior分为对称和非对称两种行为;接触面的处理interface treatment:adjust to touch程序自动取消两个接触面的间隙; add offset 可以设置偏移量,正值使两个接触面靠近可以模拟过盈配合,负值使两个接触面远离;Pinball region 可以设置判断接触区域的大小,当两个面都进入pinball region时程序则判定为发生接触;mesh connections建立网格连接connection worksheet表格查看连接信息joint 定义约束副,共有九种约束形式来约束body-body 或者body-ground;定义joint时需要定义reference和mobile regions,几何窗口左边显示的自由度,其中灰色的是被约束的,彩色的是自由的joint configure可以定义约束的初始状态Set定义初设状态,revert恢复原始状态;对于旋转面或圆柱面的约束类型,可以定义扭转刚度和扭转阻尼;大多数joints都可以通过stops来定义他的运动区域spring and beam:spring可以通过弹簧来连接body,可以定义初始值和弹簧刚度,beam可以定义材料和圆形截面半径;六、remote边界条件1、Remote boundary conditions provide a means to apply a condition whose center of action is not located where the condition is scoped , “remotely”.Remote 边界条件包括 point mass,springs,joints,remote displacement,remote force and moment loads;所有的remote边界条件都是采用MPC约束方程进行计算,几何行为可以设置为rigid,deformable and coupled,remote计算更耗时;设置remote边界一般先定义remote point,可以直接选择几何特征或给定坐标定义,也可以在定义remote边界条件时通过右键“promote remote point”定义;2、behavior controlrigid,deformable and coupled3、pinball control 可以通过pinball大小来定义约束方程的数量4、constraint equations 可以多个remote point间的相互约束关系;七、MultiStep的设置应用1、对于多步分析中的每一步,软件都作为一个独立的分析过程,载荷约束都可以单独设置;对于某些载荷或约束可以通过右键激活或抑制该步当查看计算结果选择两个载荷步之间的时间节点时,如0与1步的,则程序通过线性插值的方式得到的计算结果;2、Solution Combination结果组合Solution Combination可以通过不同的计算环境共享几何网格进行组合Solution Combination也可以通过同一计算环境的不同载荷步进行组合八、模态分析自由振动其中K-刚度矩阵和M-质量矩阵是常量,忽略阻尼C和外力F,应用线弹性材料和小变形理论,结构可以是约束的或非约束的,φ为模态坐标是个相对量;1.结构载荷和热载荷步,非线性接触不适用于模态分析,但可以施加约束或预应力;2.可以定义求解阶数和频率范围;3.由于并没有外部激励,模态变形只是一个相对量,并且是一个质量归一化的量;4.拉伸预应力将会增大自然频率,而压缩预应力将会降低自然频率;九、稳态热分析1.不考虑瞬态影响,K和Q可以是常量也可以是温度的函数,可以施加固定温度的边界条件;壳单元不考虑厚度方向的温度变化,线单元不考虑截面上的温度变化;接触中热传递:如果接触是bonded或no separation,热传递将会发生在pinball区域内的表面热接触通过以下公式进行传热:TCC默认被设为一个较大的数值用来模拟完美传热,同样可以人为设置较低的数值来模拟热阻;2.边界条件heat flow 热流量j/s,可应用于点、线、面heat flux 热通量j/m2/s,只能应用于面2D时可用于线internal heat generation 热源j/m3/s 只能用于实体perfectly insulated 绝热,默认应用于所有未设置边界条件的地方temperature 恒定温度,应用于点、线、面、实体convection 对流只能应用于面,其中h-对流传热系数,Tam-环境温度,用户可以自己设置;radiation 热辐射其中σ-玻尔兹曼常数,程序自动给定;ε-发射率,用户输入;F-form factor角系数,当correlation设为To ambient-F=1,即所有的辐射能都与周围环境进行交换当correlation设为 surface to surface ,辐射能只参与面面之间的交换,这时你可以设置Enclosure每个辐射面应该设置相同的enclosure number和Enclosure type可设为open 或perfect,如果计算报错可将其设为open;十、结果处理1.编辑legendPlane可以通过鼠标左键拖曳生产剖切面,也可以通过局部坐标系的XY平面生产剖切面 Tool 可以通过Geometry selection查看选择几何特征的计算结果,也可以先定义一个局部坐标系,再通过coordinate system查看具体某点局部坐标系的原点的计算结果;chart and Table可以对多个计算结果进行图表分析,Alert可以设置报警值,如强度极限;Geometry可以添加path和surface,path可以通过局部坐标系,边,点来定义,surface可以通过局部坐标系定义;查看edge的结果可以通过鼠标右键Convert to path result转换成基于path的计算结果,把X轴设为S即可绘制关于位置的图表;另外利用path结果可以得到应力线性化用于应力评判;error可以通过高的能量差异区来鉴别几何网格的合理性;可以通过Convergence来判断网格是否足够8.应力奇点,结构分析时由于几何模型、载荷施加等因素常常会导致应力奇点,影响计算结果的准确性,我们通过审查收敛结果来避免应力奇点;如果应力奇异区并不是我们感兴趣的区域,我们可以只对感兴趣区域的计算结果定义收敛控制,如下图所示;ANSYS结构动态分析篇一、简介动态分析包括以下模块:模态分析,谐响应分析,随机振动分析,响应谱分析及瞬态分析;动态分析中结构的惯性、阻尼都扮演着重要角色;自由振动:结构的自然频率和振型激励振动:曲柄轴和其他的旋转机械地震冲击载荷:地震工况,爆炸随机振动:火箭发射,道路交通时间载荷:汽车碰撞,汽锤、水锤等以上每种情况都可以选择相应的动态模块进行分析;1、模态分析模态分析是用来确定结构的振动特性,如自然频率和振型,通常也是进行其他动态分析的先决条件;如汽车的固有频率应发动机频率,叶片在预应力下的振动特性;2、谐响应分析谐响应分析常用来分析结构在持续的简谐载荷下的响应,如转动机械的响应;3、响应谱分析响应谱分析通常用来分析建筑结构在地震工况下的响应;4、随机振动分析宇宙空间站、航天飞机等一般都要进行随机振动分析,以便能承受一段时间内不同频率下的随机载荷;5、瞬态分析动态分析各模块的特点如下:基本方程如下:其中只有瞬态分析允许非线性,包括几何非线性、接触非线性、材料非线性;二、阻尼概述阻尼定义:阻尼是导致振动不断减弱甚至停止的一种能量耗散机制;阻尼一般与材料性质,运动速度,振动频率有关;阻尼分为以下类型:粘性阻尼-缓冲器、减震器材料/固体/滞后阻尼-内摩擦库伦或干摩擦阻尼-滑动摩擦数值阻尼-人工阻尼1、瞬态分析和阻尼模态分析中结构阻尼矩阵C的完整表达式如下:α和β阻尼用来确定瑞利阻尼对于大多数结构来说,α阻尼可以忽略,这时因此对于给定的β,低频率阻尼小,高频率阻尼大;而对于给定的α,低频率阻尼大,高频率阻尼小;α和β阻尼可以通过定义材料时输入:也可以通过全局阻尼输入:2、在谐响应分析中的材料/固体/滞后阻尼全函数的谐响应分析和模态叠加法分析中的结构阻尼矩阵C的完整表达式为:同样,α,β,g可以通过定义材料输入也可以通过求解设置输入:3、模态叠加法分析模态叠加法中的阻尼控制在谐响应分析、瞬态分析、响应谱分析及随机振动分析中都支持以下表达式:4、数值阻尼数值阻尼并不是真实的阻尼,是人工抑制由高频结构产生的数值噪声;默认值为用来过滤掉虚假的高频模态;使用较小的值来过滤掉对最终结果影响较小的非物理响应;注意:数值阻尼只适用于瞬态分析;三、模态分析应用模态分析用来分析结构的振动特性自然频率和振型,是大多数动态分析得基础;假设和限制:结构是线性的M和K是常量.线性无阻尼的自由振动方程:假设{u}为简谐运动,则有因此求解行列式的特征值和特征向量;注意,{φ}为振型反应结构振幅的比例关系,可对质量矩阵进行正则化2、参与因子与有效质量参与因子:,其中{D}是笛卡尔坐标系中各个坐标轴单位位移响应;测量各个模态在各个方向运动的总质量,较大的值意味着该模态在该方向容易被激励;有效质量:理论上,各个方向的有效质量的总和应该等于结构的总质量,但取决于模态展开的数量;3、模态展开方法接触:由于模态分析时线性分析,只允许Bonded和No separation,其他接触程序视为无接触;4、阻尼模态分析特征值是复杂的,特征值的虚数部分表示自然频率,而实数部分衡量系统的稳定性,正值不稳定,负值稳定;模态展开方法:四、谐响应分析应用输入条件:简谐变化的载荷力,压力和位移,多个载荷应具有同样得频率,力和位移可以是同相或异相;假设和限制:结构具有固定的或与频率相关的刚度,阻尼,质量,不允许非线性;所有的载荷位移按相同频率做简谐变化;当施加的载荷的频率接近结构的自然频率时,发生共振;增加阻尼降低响应的振幅;阻尼较小的变化都会导致共振区响应的大幅变化;谐响应的运动方程如下:求解方法有两种:1、全函数法,直接求解矩阵方程;该方法求解准确,但速度慢于MSUP且耗资源,支持几乎所有的载荷和边界条件,其中加速度、轴承载荷、力矩相角只能为0;2、模态叠加法MUSP,对方程进行坐标变换{u}={φ}{y},将{M}和{K}变换成对角矩阵进行解耦,再求解n个解耦的方程{y},其中{C}必须是是对称矩阵,此方法需先进行模态分析;模态叠加法是一种近似求解,准确度取决了模态的展开阶数,一般比FULL法快;基本设置:cluster results-include residual vector-在模态叠加分析中,当施加的载荷激励高阶模态时,动态响应将会很粗糙;因此采用residual vector方法,除了采用模态的特征向量,还利用附件的模态转换向量来计算高阶频率;五、响应谱分析响应谱分析主要用来替代时程分析来确定结构对时间变化载荷的响应:如地震载荷,风载,海浪载荷,活塞载荷,火箭发动机振动等;对于多自由度长时程的分析往往通过响应谱分析来近似快速的求解最大响应;1、响应谱响应谱一般是单自由度系统在给定时程内的最大响应,该响应可以是位移,速度和加速度;多个不同频率相同阻尼的单自由度振荡器K,C,M就可以绘制响应谱,其中阻尼已经包含在响应谱中,也可以给定其他的阻尼绘制相应的响应谱;位移,速度,加速度响应谱之间是可以相互转换的,转换公式如下:2、分析类型响应谱分析分为单点响应谱SPRS分析和多点响应谱分析MPRS.SPRS-已知激励方向和频率的响应谱作用在所有的支撑点上,通常用来分析建筑结构的地震载荷;参与因子γ是对给定自然频率结构响应的量度,表征每个模态对特定方向的响应贡献多少;对于每个特征频率ω,谱值S都可以通过对数插值从响应谱中得到,但超过响应谱频率不会进行插值,而是取最近点的谱值;模态系数A,定义为放大系数来乘以特征向量来给出每个模态的实际位移,计算公式如下;响应R,计算公式如下如果系统有多个模态,那么应该对各个模态下的响应R进行叠加组合响应谱分析计算最大的位移和应力响应,它不能准确计算实际响应,因此有以下3种叠加方法SRSS,CQC和ROSE;SRSS:以下情况,SRSS法不再适用:1)考虑近间距自然频率的模态2)考虑部分或全刚度响应的模态3)包含未展开的高阶频率4、如果各阶模态频率有足够的间距,可以使用SRSS法叠加;评判各阶模态是否是近距频率,对于不同的阻尼比有不同的评判准则;对于阻尼比ζ≤2%,如果fi<fj,且fj≤,则是近距频率;对于阻尼比ζ>2%,如果fi<fj,且fj≤1+5ζfi,则是近距频率;对于近距频率模态,可选用CQC或ROSE进行叠加,其中纠正系数0≤ε≤1,ε=0,不纠正;ε=1,全纠正;0<ε<1,部分纠正;CQC和ROSE计算公式中ε是基于模态的频率和阻尼计算得到;CQC计算公式如下ROSE计算公式如下5、响应谱中有两个特征频率fsp峰值频率和fzpa0周期加速度区域低频区<fsp,不考虑模态纠正除非有近距频率,可用SRSS,CQC或ROSE;中频区在fsp和fzpa之间,由周期区向刚性区转变,模态包含周期部分和刚性部分,通常用系数α将响应分为周期部分和刚性部分;α=0,周期;α=1,刚性;0<α<1,部分周期部分刚性;高频区>fzpa,刚性区,模态需要完全纠正;计算α有两种方法:Lindley-Yow和Gupta;Lindley-Yow法:α=αSa, α=ZPA/Sa,ZPA-0周期的加速度,Sa第i阶频率的加速度;当Sa<ZPA,α=0;Sa=ZPA, α=1;Sa>ZPA,随着Sa的减小α增大;Gupta法:α=αf,Lindley-Yow法中刚性响应影响所有的模态其对应的频率响应Sa>ZPA,但不应该用于其模态频率f<fsp;Gupta法中刚性响应影响所有的模态只有其频率f>f1=fsp,因此Gupta法适用大部分情况,应优先选用;6、刚性响应计算首先如前面描述的单独进行各个模态的响应计算,当打开刚性响应影响Rigid Response Effect时,这些模态响应R就不再是进行直接组合,而是分为周期Rp和刚性部分Rr;刚性响应系数α可选择Gupta或Lindley-Yow法计算;周期部分和刚性部分响应计算如下:然后分别进行组合叠加,对于周期部分响应Rp可用SRSS,CQC或ROSE方法进行叠加,如果含有近距频率模态时需要纠正不能使用SRSS法;刚性部分响应Rr进行代数和叠加即可最后将周期部分响应和刚性部分响应进行组合得到总的响应Rt7、缺省质量响应进行模态分析时,我们不可能展开所有模态来考虑结构100%的质量,因此我们关心的模态中所有质量占总质量的百分比即为有效质量比率,但展开的最高模态频率因远大于响应谱的fzpa,才能得到较为准确的分析结果;有时需要展开的模态阶数太多,我们可以通过模态分析计算缺省的质量将其进行额外的响应分析Missing Mass Response,这样就不必展开的模态频率要远大于fzpa;当f>fzpa,加速度响应是刚性的,因此可以进行静态的加速度分析;1)首先可以计算频率大于fzpa总的惯性力FT2)计算各个模态的惯性力3)计算各模态惯性力的合力。


ansys 有限元分析结果与理论公式计算结果对比1、有限元是近似求解一般连续场问题的数值方法2、有限元法将连续的求解域离散为若干个子域,得到有限个单元,单元和单元之间用节点连接3、直梁在外力的作用下,横截面的内力有剪力和弯矩两个.解: (1)梁的最大弯矩m N m •=⨯==K 45.023.0102ql M 22ax(2抗弯截面模量 3333m m 1028.6324032d ⨯=⨯==ππz W(3)梁的最大弯曲应力Mpa 7.711028.61045.036m ax m a =⨯⨯==M W z x σ ANSYS 计算结果与分析一、 有限元原理:有限元的解题思路可简述为:从结构的位移出发,通过寻找位移和应变, 应变与应力,应力与内力,内力与外力的关系,建立相应的方程组,从而由已知的外力求出结构的内应力和位移。
有限元分析过程由其基本代数方程组成:[K] {V}={Q},[K]为整个结构的刚变矩阵,{V}为未知位移量,{Q}为载荷向量。
这些量是不确定的,依靠所需解决的问题进行定量描述。
上述结构方程是通过应用边界条件,将结构离散化成小单元,从综合平衡方程中获得。
有限元是通过单元划分, 在某种程度上模拟真实结构,并由数字对结构诸方面进行描述。
其描述的准确性依赖于单元细划的程度,载荷的真实性,材料力学参数的可信度,边界条件处理的正确程度。
本算例采用三角形六结点来划分单元。
二、 有限元解题步骤:有限元的解题步骤为: ①连续体的离散化;②选择单元位移函数;③建立单元刚度矩阵;④求解代数方程组,得到所有节点位移分量;⑤由节点位移求出内力或应力。
本例子中,梁的受力模型如图所示网格划分如图边界条件:根据受力情况,使用右手定则,判断横梁受弯曲m N m •=K 45.0M ax时施加在X 轴正方向。
计算结果及结果分析:如图示,最大弯曲应力值为71.849Mpa 。
通过与手动计算比较,准确率达99.8%以上。


有限元软件ansys简介有限元分析(FEA,Finite Element Analysis)的基本概念是用较简单的问题代替复杂问题后再求解。
它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的(较简单的)近似解,然后推导求解这个域总的满足条件(如结构的平衡条件),从而得到问题的解。
这个解不是准确解,而是近似解,因为实际问题被较简单的问题所代替。
由于大多数实际问题难以得到准确解,而有限元不仅计算精度高,而且能适应各种复杂形状,因而成为行之有效的工程分析手段。
ANSYS是一种广泛的商业套装工程分析软件。
所谓工程分析软件,主要是在机械结构系统受到外力负载所出现的反应,例如应力、位移、温度等,根据该反应可知道机械结构系统受到外力负载后的状态,进而判断是否符合设计要求。
一般机械结构系统的几何结构相当复杂,受的负载也相当多,理论分析往往无法进行。
想要解答,必须先简化结构,采用数值模拟方法分析。
由于计算机行业的发展,相应的软件也应运而生,ANSYS 软件在工程上应用相当广泛,在机械、电机、土木、电子及航空等领域的使用,都能达到某种程度的可信度,颇获各界好评。
使用该软件,能够降低设计成本,缩短设计时间。
ANSYS 软件是融结构、热、流体、电磁、声学于一体的大型通用有限元软件,可广泛的用于核工业、铁道、石油化工、航空航天、机械制造、能源、汽车交通、国防军工、电子、土木工程、生物医学、水利、日用家电等一般工业及科学研究。
该软件提供了不断改进的功能清单,具体包括:结构高度非线性分析、电磁分析、计算流体力学分析、设计优化、接触分析、自适应网格划分及利用ANSYS 参数设计语言扩展宏命令功能。
有限元分析有限元分析(FEA,Finite Element Analysis)的基本概念是用较简单的问题代替复杂问题后再求解。
它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的(较简单的)近似解,然后推导求解这个域总的满足条件(如结构的平衡条件),从而得到问题的解。