基于雷达传感器的简易LED智能照明方案
- 格式:pdf
- 大小:81.88 KB
- 文档页数:2
雷达控制LED节能灯一、产品特点:目前声光控开关都是在白炽灯(纯电阻)的基础上设计的,各个国家节能的要求已经逐步禁止生产白炽灯,用荧光节能灯或LED节能灯直接替代时又失去控制(长亮)。
声音控制在夜晚人静时干扰居民休息,本产品“雷达控制LED节能灯”是人体移动产生的信号控制LED节能灯开关。
在一定范围内(3—10米可调)如果有人体移动(如果象小动物动作不动作)既会开灯,离开时(3—10米可调)既熄灭,不存在延时耗电,也不会影响行动,白天不会亮只有在夜晚或亮度不够时才会开关。
既具有开关节能的优点,又消除了白炽灯、节能灯在频繁开关灯时容易损坏、寿命缩短的缺点,不会由于需要声音控制而影响周围居民休息。
开灯后能立即达到最高亮度,离开时马上既会熄灭,寿命超长,损坏率极低。
节电率在传统声光控延时开关的基础上又提高10~15%以上;既可避免摸黑找开关造成的磕碰损伤,又可杜绝楼道灯有人开、没人关的“长明灯”现象。
作为第新一代电光源,LED灯不同于白炽灯靠加热钨丝发光,95%以上的电能被变成热量而浪费掉,也不同于节能灯或日光灯靠含汞蒸气激发荧光粉发光,其镇流器的耗电量高达20%,它是利用固态半导体芯片作为发光材料,通过载流子发生复合放出过剩的能量而引起光子直接发射出白光。
它具有寿命长,光电转换效率高,发热量低,响应速度快,节能环保等优良特性,必将取代白炽灯和荧光灯,是21世纪的“绿色照明光源”。
二、主要性能:1、工作电压:AC220V。
2、人体移动灵敏度:3—10米(可调)。
3、光控灵敏度:≤10Lux。
4、使用寿命:约5万小时,是白炽灯的50倍、日光灯的10倍。
5、高效节能:在传统声光控延时开关的基础上又提高10~15%以上。
6、发光效率:≤100lm/w。
7、发光角度:≤120度。
8、响应速度快:开灯后立即点亮,无启辉延迟和闪烁开灯的缺点。
9、不延时:人在既亮,人走既灭,不存在传统声控开关延时耗电。
10、耐冲击和频繁开光:不怕频繁开关,完全消除了象白炽灯或荧光节能灯频繁开光极易损坏的致命缺陷。
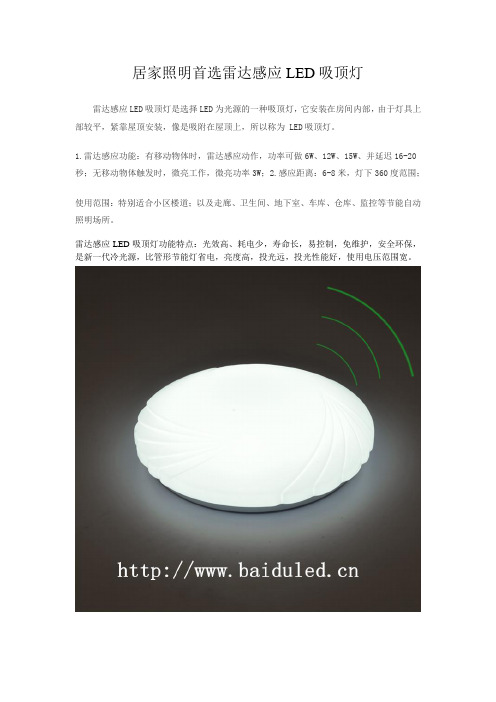
居家照明首选雷达感应LED吸顶灯
雷达感应LED吸顶灯是选择LED为光源的一种吸顶灯,它安装在房间内部,由于灯具上部较平,紧靠屋顶安装,像是吸附在屋顶上,所以称为 LED吸顶灯。
1.雷达感应功能:有移动物体时,雷达感应动作,功率可做6W、12W、15W、并延迟16-20秒;无移动物体触发时,微亮工作,微亮功率3W;
2.感应距离:6-8米,灯下360度范围;
使用范围:特别适合小区楼道;以及走廊、卫生间、地下室、车库、仓库、监控等节能自动照明场所。
雷达感应LED吸顶灯功能特点:光效高、耗电少,寿命长,易控制,免维护,安全环保,是新一代冷光源,比管形节能灯省电,亮度高,投光远,投光性能好,使用电压范围宽。
雷达感应LED吸顶灯产品特征:
1、外罩采用亚克力材料,光色均匀,防眩光,透光率高
2、内置电源,方便安装(如图)
3、可取代传统吸顶灯
雷达感应LED吸顶灯的优点
发光效率高根据实测的结果,一盏8W的LED就可以取代一盏32W的吸顶灯。
电功率可以节省4倍以上。
寿命长LED的寿命为10万小时,做成灯具以后,现在实际上公认的寿命为至少3万小时,吸顶灯效果高质量的可以做到5万小时,要比荧光灯长10倍以上,即使最高寿命的三基色荧光灯的寿命为1万小时,也还高出5倍以上。
不含汞无紫外线辐射,无光线污染。
健康绿色的LED吸顶灯对于现在环保呼声日益升高的时代,真的是一种切合时代需求的灯饰,无汞,无紫外辐射,无光线污染的LED吸顶灯值得向大家推荐一下。

微波雷达感应灯方案概述微波雷达感应灯是一种智能化照明设备,通过内置的微波雷达模块来实时感知周围的动静,并根据感知结果来控制灯的开关。
相比传统的红外感应器,微波雷达感应器具有更远的感知距离和更强的适应性,能够在更广泛的环境中实现自动照明。
本文将介绍微波雷达感应灯的工作原理、设计方案和应用场景。
工作原理微波雷达感应灯通过发送微波信号并接收反射回来的信号来判断周围的物体是否存在,并进一步判断物体的距离和运动方向。
基于这些信息,感应灯可以根据设定的触发条件来决定是否开启照明。
微波雷达感应灯的工作原理可以分为以下几个步骤:1.通过天线发射微波信号。
2.接收反射回来的微波信号。
3.对接收到的信号进行信号处理和分析。
4.根据分析结果,判断是否有物体进入感应范围。
5.如果有物体进入感应范围且满足触发条件,则控制灯的开关。
设计方案传感器模块微波雷达感应灯的核心部分是微波雷达传感器模块。
传感器模块通常包括以下几个组件:•微波信号发射器:负责发射微波信号。
•天线:用于发送和接收微波信号。
•微波信号接收器:负责接收反射回来的微波信号。
•信号处理芯片:对接收到的信号进行处理和分析,提取目标物体的信息。
灯控制模块微波雷达感应灯还需要一个灯控制模块来实现灯的开关控制。
基本的灯控制模块通常包括以下几个部分:•开关控制电路:负责控制灯的开关。
•微控制器:用于控制开关控制电路的工作,以及与传感器模块进行通讯和数据交换。
•电源管理模块:负责为传感器模块和灯提供电源。
触发条件设定触发条件的设定取决于具体的应用场景。
一般来说,触发条件可以设置为感应范围内有物体进入,并且保持一定时间。
通过设定适当的触发条件,可以避免误触发和能源的浪费。
应用场景微波雷达感应灯可以广泛应用于各种场景,包括但不限于以下几个方面:1.家庭照明:可以安装在门口、走廊等地方,实现智能化的自动照明,提高家庭的安全性和舒适性。
2.商业场所:可以安装在商场、办公楼、地下停车场等场所,实现智能化的照明管理,提高能源利用效率。

第18卷第4期2020年8月福建工程学院学报JournalofFujianUniversityofTechnologyVol.18No.4Aug.2020doi:10.3969/j.issn.1672-4348.2020.04.011基于雷达定位区域识别的智能照明节能方法欧海燕1ꎬ2ꎬ范祯桂1ꎬ潘鑫1(1.福建工程学院信息科学与工程学院ꎬ福建福州350118ꎻ2.福建工程学院电子信息与电气技术国家级实验教学示范中心ꎬ福建福州350118)摘要:针对智能照明控制系统节能效果不佳㊁误判率高㊁反应时间长的问题ꎬ提出一种区域控制的智能照明系统方法ꎮ该方法根据照度公式构建照明系统区域控制模型ꎬ采用雷达技术精确定位人员的实时位置ꎬ智能开启和关闭对应区域的LED照明灯ꎮ实验结果表明ꎬ该系统定位误差在3cm以内ꎬLED照明误判率低于1%ꎬ电量平均减少23.8%ꎬ反应时间短ꎬ可以较好实现绿色节能ꎮ关键词:节约能源ꎻ智能照明ꎻ区域控制ꎻ雷达定位中图分类号:TP393文献标志码:A㊀㊀㊀㊀㊀文章编号:1672-4348(2020)04-0365-05EnergysavingmethodofintelligentlightingbasedonradarlocationandregionrecognitionOUHaiyan1ꎬ2ꎬFANZhengui1ꎬPANXin1(1.SchoolofInformationScienceandEngineeringꎬFujianUniversityofTechnologyꎬFuzhou350118ꎬChinaꎻ2.NationalExperimentalTeachingDemonstrationCenterforElectronicInformationandElectricalTechnologyꎬFujianUniversityofTechnologyꎬFuzhou350118ꎬChina)Abstract:Aimingattheproblemsoflowenergysavingeffectꎬhighmisjudgmentrateandlongresponsetimeofintelligentlightingcontrolsystemꎬamethodofintelligentlightingsystemwithregionalcontrolwasproposed.Thismethodconstructsaregionalcontrolmodelofthelightingsystemaccordingtotheilluminanceformulaꎬu ̄sestheradartechnologytoaccuratelylocatethereal ̄timepositionofthepersonnelꎬandintelligentlyturnsonorofftheLEDlightsinthecorrespondingregion.Experimentalresultsshowthatthelocationerrorofthesys ̄temiswithin3cmꎬthemisjudgmentrateofLEDlightingislessthan1%ꎬtheaveragepowerconsumptionisreducedby23.8%ꎬtheresponsetimeisshortꎬandgreenenergy ̄savingcanbewellachieved.Keywords:energysavingꎻintelligentlightingꎻregionalcontrolꎻradarlocalization㊀㊀截至2019年ꎬ我国城市居民用电量占14.2%[1-2]ꎬ其中照明用电量占全国用电量12%[3]ꎮ室内照明灯打开的数量和使用时长主要由人工控制ꎬ如果管理不当ꎬ极易造成用电量的浪费ꎮ所以ꎬ研究智能LED照明控制系统实现绿色节能具有重要社会效益ꎮ刘云飞等[4]提出利用热释电红外传感器有效识别人员情况ꎬ实现对室内各组灯光的智能控制ꎬ然而热释电红外传感器容易受温度影响ꎬ导致出现误判现象ꎮ邹优敏等[5]结合RSSI测距技术㊁Wi-Fi通信技术和自动化控制系统ꎬ设计人员位置的室内智慧照明系统ꎬ但控制方式复杂ꎮ孙彦民[6]提出雷达微波感应模块在T8LED灯管中的应用证实雷达感应优于其他智能感应系统ꎬ而公文礼[7]研制雷达微波感应式隔爆兼本安型LED巷道灯ꎬ根据行人和移动设备进行自动智能切换ꎬ但是未应用到室内环境ꎮ本研究在上述文献基础上提出一种区域控制收稿日期:2020-06-02基金项目:福建省教育厅科研项目(JT180352)第一作者简介:欧海燕(1983 )ꎬ女ꎬ福建莆田人ꎬ实验师ꎬ硕士ꎬ研究方向:智能照明控制㊁电子技术ꎮ福建工程学院学报第18卷的智能照明系统方法ꎬ对人员在不同运动状态轨迹下实时智能控制ꎬ能够提高室内照明能效ꎬ降低误判率ꎬ有效控制时长ꎬ更好地达到了节能绿化效果ꎮ1㊀构建单个照明区域划分模型单个LED照明区域受照明参数影响ꎬ为了实现智能照明ꎬ需要构建单个照明区域划分模型ꎬ如图1所示ꎮ先将区域划分为开启区和关闭区ꎬ由于考虑到人的移动及系统反应延迟ꎬ当人从开启区进入关闭区或关闭区进入开启区时ꎬ因延迟可能出现延时关闭或延时开启现象ꎮ在开启区和关闭区中设置两缓冲区ꎬ分别为开启缓冲区和关闭缓冲区ꎮ当人体由关闭区进入开启区时ꎬ到达开启缓冲区启动照明系统ꎻ由开启区进入关闭区时ꎬ到达关闭缓冲区就关闭照明系统ꎮ图1㊀单个照明区域划分模型图Fig.1㊀Modelofindividuallightingarea(1)计算半径r本系统以教室㊁实验室作为测试环境ꎬ长8mꎬ宽8mꎬ照明标准300lxꎬ照明灯离地面h=3mꎬ工作面高0.75mꎬ常见40W双LED灯管(光效为100lm/W)作为照明装置ꎮ根据平均照度公式算出灯具数量ꎬEav为工作面上的平均照度ꎬ单位lxꎻφ为光源光通量ꎬ单位lmꎻN为光源数量ꎬU为利用系数ꎬA为工作面面积ꎬ单位为m2ꎻK为灯具的维护系统ꎬ一般取0.8ꎬ公式如下:Eav=NφUKA(1)φ=η∗E(2)式中ꎬη为光效ꎬ单位为lm/WꎬE为光源的功率ꎬ单位为Wꎮ室形指数RI表示2倍的房间或场所面积与该房间或场所水平面周长与灯具安装高度与工作面高度的差之商ꎬ公式如下:RI=l+w(l+w)hr(3)式中ꎬl为长度ꎬw为宽度ꎬhr为照明灯到工作面的高度ꎬ3个参数单位都为mꎮ将已知条件代入ꎬ得到RI=1.78ꎮ根据利用系数表插入法求出U=0.67ꎮ依次带入上述公式得出N值为N=8.96(4)按照9盏双管灯均匀分布ꎬ已知双管日光灯长1.20mꎬ宽0.25mꎬ日光灯相邻中心点作为半径约为2.67mꎬ双管日光灯长边缘到中心距离小于宽边缘到中心距离ꎬ为了不使两盏照明灯在同一个范围内ꎬ半径最大取2.07mꎮ根据9盏灯均匀排布以及人员与某区域圆心最小距离来智能开启该区域对应的照明灯ꎬ除去重叠部分ꎬ照明面积为内接正方形ꎬ根据光通量和面积公式计算可得照度值约为467lxꎬ大于300lxꎬ所以半径最大取2.07mꎬ分区划分满足照明要求ꎮ(2)缓冲区宽度d由于系统具有延迟ꎬ为避免延迟引起的误差ꎬ对单个区域再划分缓冲区ꎮ设人的行走速度为v=1.5m/sꎬ系统延迟时间为t(s)ꎬ则环形缓冲区的宽度为:d=vt(5)对系统延迟时间进行1000次重复测量ꎬ得到如图2(a)所示数据图ꎬ利用直方图对其进行统计处理ꎬ得到结果如图2(b)所示ꎮ从图2看出ꎬ系统延迟时间服从高斯分布:Pt()=1σ2πe-t-μ()22σ2(6)其中:μ=11000ð1000i=1ti(7)σ=11000ð1000i=1ti-μ()2(8)可得:Ρtiɤμ+σ()=Fμ+σ()=0.84(9)其中ꎬ663第4期欧海燕ꎬ等:基于雷达定位区域识别的智能照明节能方法图2㊀延迟时间测量图Fig.2㊀MeasurementchartofdelaytimeFt()=ʏt-¥1σ2πe-ξ-μ()22σ2dξ(10)根据上述结果可知ꎬ系统延迟时间小于μ+σ()为高概率事件ꎬ覆盖大多数情况ꎬ此时tʈ0.17sꎮ所以缓冲区的宽度为:dʈ0.25m2㊀雷达定位技术于测试室垂直两面墙正中位置分别放置2个YDLIDARX4型雷达ꎬ它采用红外线785nm光源ꎬ具有频率3KHzꎬ功率1.5Wꎬ测距10mꎬ精度小于1%ꎬ扫描时间0.33msꎬ满足ClassI安全级别的特性ꎬ电机带动雷达测量测试室的数据信息ꎮ将采集到的数据送至处理器ꎬ经处理器分析计算ꎬ确定具体位置雷达1在纵轴中间ꎬ高1.3m处ꎬ雷达2在横轴中间ꎬ高1.3m处ꎮ2.1㊀采样原理雷达使用了三角测距来完成扫描ꎮ先发送激光信号ꎬ当激光遇到一个物体时会反弹ꎬ并被雷达上的传感器探测到ꎬ内置处理器用于计算物体与雷达之间的距离以及当前角度ꎮ通过一个电机转动ꎬ带动测距模块旋转扫描ꎬ实现360ʎ的环境扫描与测距ꎮYDLIDARX4的发射器功率较低ꎬ使用PWM方式驱动ꎬ可以迅速进行发射功能ꎮ该雷达扫描时功率为ClassI级别ꎬ确保对生物和物品的安全ꎮ2.2㊀数据处理通过扫描雷达返回数据进行处理后得到以雷达为原点的极坐标数据ꎬ设两雷达采样点的数据分别为:Radar1:DistanceiAnglei()Radar2:DistancejAnglej(){(11)通过极坐标与直角坐标系的关系进行换算后得到:xi=Distancei∗cos(Anglei)yi=Distancei∗cos(Anglei){(12)xj=Distancej∗cos(Anglej)yj=Distancej∗cos(Anglej){(13)根据雷达对应位置ꎬ设两雷达距离为rꎬ则雷达2所得到的采样点换算至雷达1坐标系内为:xi=xj+22ryi=yj+22rìîíïïïïï(14)最终得到所有采样点的综合数据(xi㊀yi)ꎮ3㊀实验论证3.1㊀定位测试一般桌面高0.75mꎬ电脑高度0.4mꎬ将雷达放置于1.3m处可以有效避免物体遮挡造成误判的问题ꎮ(1)人员测试基于坐标做了2组实验ꎬ第1组是无人时采样点如图3(a)ꎬ第2组是有人时采样点如图3(b)ꎬ此时房间内进入10人ꎬ将两图数据比较处理后ꎬ可得出a-j所对应坐标分别为(723ꎬ7515)㊁(2112ꎬ6823)㊁(4401ꎬ5310)㊁(6530ꎬ5968)㊁(1231ꎬ4760)㊁(3524ꎬ3180)㊁(5893ꎬ3914)㊁(1287ꎬ1089)㊁(2560ꎬ711)㊁(4893ꎬ836)ꎬ单位为mmꎮ(2)精度测试雷达定位测试结果如表1所示ꎬ从1表中可以看出定位误差在ʃ3cm以内ꎬ结果表明该系统有较高定位精度ꎮ3.2㊀区域划分对房间内区域进行3种划分ꎬ如图4所示ꎮ模型一半径约为1.33mꎬ模型二半径约为1.89mꎬ模型三半径约为2.07mꎮ对于模型一划分区域简单ꎬ763福建工程学院学报第18卷容易判断哪盏灯开ꎮ而模型二和模型三存在重叠部分ꎬ当人停留在区域重叠部分时ꎬ分2种情况:(1)当人员与某区域圆心距离最短ꎬ智能开启该区域对应的照明灯ꎻ(2)当人员与重叠区域圆心距离相等时ꎬ同时开启对应几盏照明灯ꎬ光照强度取平均值ꎮ模型二相对模型三更容易判断哪盏灯开ꎮ图3㊀采样点示意图Fig.3㊀Samplingpoints表1㊀定位结果及误差分析Tab.1㊀Locationresultsanderroranalysismm实际目标坐标(xꎬy)定位结果(xꎬy)误差(әxꎬәy)(2180ꎬ3160)(2189ꎬ3176)(9ꎬ16)(3679ꎬ4325)(3677ꎬ4312)(2ꎬ13)(7653ꎬ6334)(7643ꎬ6320)(10ꎬ14)(1036ꎬ4360)(1035ꎬ4355)(1ꎬ5)(962ꎬ369)(932ꎬ360)(30ꎬ9)(4023ꎬ4677)(4022ꎬ4674)(1ꎬ3)图4㊀实验区域划分示意图Fig.4㊀Divisionofexperimentalareas㊀㊀现对这3种情况进行系统误判率测试ꎬ每种情况进行1000次测试ꎮ测试情况如图5ꎮ从误判率和划分区域复杂程度综合判断ꎬ采863第4期欧海燕ꎬ等:基于雷达定位区域识别的智能照明节能方法图5㊀测试结果Fig.5㊀Testresults用模型二较为合适ꎬ该模型测试误判率为0.9ɢꎬ且容易判断哪盏灯开或关ꎮ3.3㊀节能分析系统灯亮时间为tsꎬ开启区时间为t1ꎬ软件设置延时系统时间为t2ꎬ人员滞留时间为t3ꎬ误差引起时间为t4ꎬ公式如下:ts=t1+t2+t3+t4(15)t1=2(r+d)v(16)㊀㊀由于误差引起时间很小ꎬ不予考虑ꎬ而人员滞留时间存在不确定性ꎬ也不予考虑ꎬ软件设置延时时间为20sꎬ人员按照1.5m/s平均速度经过划分区域灯亮的平均时间约为22.86sꎬ常用声控灯开启时间一般为30sꎬ节省照明电量为23.8%ꎮ采用雷达工作功率为1.5Wꎬ相对比照明灯40W相差25.7倍ꎬ即使工作24h也不会达到照明灯工作1h浪费电能ꎬ且对于照明灯数越多的环境效果就更为显著ꎮ4㊀结论提出一种区域控制的智能照明系统方法的研究ꎬ该方法通过2个雷达全方位扫描ꎬ经过定位㊁区域比较方式ꎬ实现灯光的智能控制ꎬ不仅能减少反应时间㊁误判率高的现象ꎬ还能达到节能绿化效果ꎮ对于那些管理方式不当㊁不方便行动或深夜无灯的人员来说ꎬ该系统就很实用ꎮ经过试验对比ꎬ能减少23.8%的电量ꎮ该系统可广泛应用于教室㊁实验室㊁科研㊁独居㊁楼道㊁走廊等场所ꎮ参考文献:[1]刘炜.住宅智能化人工照明光环境[M].北京:中国建筑工业出版社ꎬ2017:3-4.[2]国家能源局发布2019年全社会用电量[EB/OL].[2020-01-20].http:ʊwww.nea.gov.cn/2020-01/20/c_138720877.html.[3]中国照明学会ꎬ北京华通人商用信息有限公司.2019中国照明市场调查分析报告[R].北京:中国市场出版社ꎬ2020.[4]刘云飞ꎬ左臣瑞ꎬ毕鑫.基于人体定位的智能灯光控制系统[J].电子质量ꎬ2017(3):60-62.[5]邹优敏ꎬ孙玮ꎬ郭爱煌等.基于人员位置的室内智慧照明系统设计[J].计算机测量与控制ꎬ2018(7):157-160ꎬ164.[6]孙彦民.雷达微波感应模块在T8_LED灯管中的应用[J].电子技术与软件工程ꎬ2016(13):134.[7]公文礼.雷达微波感应式隔爆兼本安型LED巷道灯的研制与应用[J].电气防爆ꎬ2017(1):5-8.(责任编辑:方素华)963。

智能照明激光雷达感应智能照明系统智能家居的普及使得人们对于智能照明系统的需求越来越高。
智能照明激光雷达感应智能照明系统,作为一种先进的照明技术,可以满足人们对于照明的个性化需求,提高生活的舒适度和便捷性。
智能照明激光雷达感应智能照明系统利用激光雷达技术,通过对房间内物体的探测,实现对照明的智能调节。
该系统可以根据人体的活动情况,自动调整照明亮度和色温,使得光线始终与人的需求保持一致。
无论是在日常生活中,还是在工作环境中,智能照明激光雷达感应智能照明系统都能够为人们提供更加舒适、健康的光照环境。
智能照明激光雷达感应智能照明系统的优势在于其高灵敏度和精准度。
激光雷达能够非常准确地感知到人体的存在与活动,从而实现对照明系统的智能控制。
相比之下,使用传统的红外感应器来进行人体探测存在一定的局限性,例如容易受到温度和其它环境因素的干扰,而且探测范围也有限。
智能照明激光雷达感应智能照明系统可以在更广泛的范围内进行探测,响应速度也更加灵敏,能够更准确地感知人体的存在和活动。
除了高灵敏度和精准度,智能照明激光雷达感应智能照明系统还具有很好的可调节性。
用户可以根据自己的需求,设定照明系统的工作模式。
例如,可以设置在白天光线充足时,只保持低亮度的照明,以实现能源的节约;而在夜晚,可以提高照明亮度,使得房间更加明亮。
此外,智能照明激光雷达感应智能照明系统还可以根据不同的环境需求,自动调节照明的色温,如在工作场所提供冷色调的照明,而在居家环境中则提供暖色调的照明。
智能照明激光雷达感应智能照明系统的应用范围广泛。
不仅可以在住宅中使用,还可以应用于商业建筑、办公场所等各种室内环境。
在商业建筑中,智能照明激光雷达感应智能照明系统可以根据人流量的变化,动态调整照明亮度和色温,以实现节能和舒适性的平衡。
在办公场所中,系统可以根据每个人的工作习惯和需求,个性化地提供照明服务,提高工作效率和员工的满意度。
然而,智能照明激光雷达感应智能照明系统也存在一些问题和挑战。

基于智能传感器的智慧照明系统设计与实现智慧照明系统是以智能传感器为基础的一种新型照明系统,通过传感器对环境光照、人体活动等信息进行实时监测,自动调节照明亮度和灯具开关,以提高照明效果和节能效果。
本文将介绍基于智能传感器的智慧照明系统的设计与实现。
首先,智慧照明系统的设计需要考虑传感器的选择和布置。
常用的传感器有光强传感器、人体红外传感器等,可以根据实际需求进行选择。
在人流密集的区域,可以选择人体红外传感器来检测人体活动情况;而在室内或者室外的光线较暗的地方,可以选择光强传感器来实时监测环境光照情况。
其次,智慧照明系统的实现需要建立一个传感器节点网络。
传感器节点可以通过有线或者无线方式连接到中央控制器,传输检测到的数据。
在传输数据时,可以使用无线传输技术,如Wi-Fi、蓝牙等,以提高系统的灵活性和扩展性。
接着,中央控制器是智慧照明系统的核心。
中央控制器可以是一个单独的设备,也可以是一个运行在云端的软件平台。
其主要任务是接收传感器节点发送的数据,并根据预设的算法进行分析和决策。
例如,当传感器检测到环境光照较暗时,中央控制器会发送命令,使照明灯具自动调整亮度;当传感器检测到人体活动时,中央控制器会发送命令,使照明灯具自动开启或关闭。
此外,智慧照明系统还可以提供远程控制功能。
通过手机APP或者网页平台,用户可以随时随地对智慧照明系统进行监控和控制。
用户可以手动调节照明亮度、设置定时开关等功能,以满足个性化的需求。
在智慧照明系统的设计和实现过程中,还要考虑能源管理和安全性。
一方面,智慧照明系统可以根据实际环境情况进行能源调配,提高能源利用效率,节约能源。
另一方面,智慧照明系统需要采取措施确保数据的安全性和隐私保护,例如采用加密技术对数据进行保护,限制用户权限等。
最后,智慧照明系统的设计和实现需要进行系统测试和优化。
在测试过程中,可以模拟各种情景,检验系统的可靠性和稳定性。
根据测试结果,对系统进行优化,例如提高传感器的精确度、减少误报率等,以达到更好的照明效果和节能效果。
雷达感应LED筒灯新技能get,赶紧的
雷达感应原理:利用多勒普效应原理研发出一块平面天线发射与接受雷达感应信号的控制系统,智能检测周围电磁环境,自动调整工作状态,当人或车等移动物体进入感应范围内,天线板发出的雷达信号波形发生改变,改变后的雷达信号被接受器接收时,改变的雷达感应信号被接收器收到,将信号变化告知控制器,控制器控制电源输出变化。
雷达感应LED筒灯特点:
1.雷达感应LED筒灯光控功能:当环境有光时完全不工作;当环境无光时进入感应受控状态;
2.雷达感应功能:在无光条件下,有移动物体时,雷达感应动作,进入满负状态,功率4W,并延迟16-20秒;无移动物体触发时,灯灭;
3.感应距离:5-6米,灯下360度范围;
4.光控灵敏度:7-10LUX.
使用范围:特别适合小区楼道;以及走廊、卫生间、地下室、车库、仓库、监控等节能自动照明场所。
雷达感应LED筒灯使用注意事项:
1、严禁用金属物体遮盖感应器表面,金属物体会屏蔽雷达信号。
2、禁止将雷达感应LED玉米灯灯安装在有WIFI信号等同样频率的场所,
WIFI信号与雷达信号的频率是一样的,会相互干扰。
3、建议雷达感应器与雷达感应器之间的安装距离大于2米,尽量避免感应
范围内相交。
雷达感应led日光灯原理
雷达感应LED日光灯是一种基于雷达技术和光电技术相结合的智能照明设备。
它采用了雷达感应器,感知周围环境的动态变化,并通过控制LED灯的亮灭来实现智能照明。
雷达感应器发射无线电波,向周围环境发送信号,并接收目标物体或人体返回的回波。
通过对信号的处理,可以确定目标物体的位置、速度和方向。
当有人或物体进入雷达感应器的感应范围内时,感应器会接收到回波,并传输信号给LED日光灯控制器。
控制器根据接收到的信号来判断是否需要开启LED灯。
LED日光灯的亮度可以根据感应到的目标距离来调节。
当目标离灯具较近时,LED灯会以高亮度点亮,以提供充足的照明。
当目标远离灯具时,LED灯会逐渐降低亮度或熄灭,以节省能源。
这种智能调节可以根据不同环境需求,提供适当的照明效果。
雷达感应LED日光灯的优势在于可以通过无线电波穿透障碍物,实现隐蔽式的感应和控制。
同时,LED灯的节能性和长寿命特点也使其成为一种环保和经济的照明选择。
总而言之,雷达感应LED日光灯利用雷达技术感知周围环境的变化,并通过控制LED灯的亮灭和亮度调节,实现智能照明。
它具有隐蔽感应和节能环保的特点,适用于各种室内和室外场景中的照明需求。
基于传感器技术的智能照明系统设计与实现智能照明系统在现代建筑设计中扮演着越来越重要的角色。
基于传感器技术的智能照明系统设计与实现提供了一种高效能、节能的照明解决方案。
传感器技术的广泛应用不仅能够提高照明系统的智能性和自动化程度,还可以显著降低能源消耗,减轻环境污染。
本文将介绍智能照明系统设计的基本原则,探讨传感器技术在智能照明中的应用,以及如何实现一个高效可靠的智能照明系统。
智能照明系统设计的基本原则是能源节约和舒适性。
能源节约是智能照明系统设计的首要目标,通过智能控制实现照明的精确调节,避免能源的浪费。
借助传感器技术,照明可以根据环境光线和人体活动情况进行自动调节。
例如,当周围环境变暗时,传感器检测到这一变化,智能照明系统会自动增加光照强度。
当没有人活动时,照明系统也会自动关闭或调整到最低亮度来节省能源。
此外,舒适性是另一个重要的设计原则。
照度、颜色温度和色彩还原度是影响人们感知舒适度的关键因素。
借助传感器技术,智能照明系统可以根据人们的不同需求和活动场景来自动调整照明参数,提供更加舒适的光环境。
在智能照明系统中,传感器技术的应用是实现智能化的核心。
首先,光照传感器是一种常用的传感器,用于检测周围环境的光照强度。
根据光照传感器的检测结果,智能照明系统可以自动调节照明亮度,确保光照水平的合理性和舒适性。
其次,存在感应传感器是另一种常见的传感器类型。
它可以检测到人体的存在并传输相应的信号。
通过安装存在感应传感器,智能照明系统可以实时感知人体的存在,并根据人体活动情况自动调整照明亮度和开关状态。
此外,还可以利用温度传感器来检测环境温度,从而实现照明系统的智能化调节,达到节能的目的。
为了实现基于传感器技术的智能照明系统,需要设计一个高效可靠的控制系统。
首先,所选用的传感器应具有高精度和可靠性,以保证智能照明系统的准确性和稳定性。
其次,需要建立一个合理的数据传输与处理系统,以确保传感器的数据可以被实时采集和处理。
基于超声波雷达的智能路灯系统设计与实现智能路灯是基于智能化技术的新型道路照明系统,旨在提高道路照明效果、节能环保以及实现智能管理。
本文将介绍基于超声波雷达的智能路灯系统的设计与实现。
一、引言随着城市化进程的加快,道路照明问题日益凸显。
传统的路灯系统存在照明质量低、能源浪费多以及管理不便等问题。
为了解决这些问题,智能路灯系统应运而生。
其中,基于超声波雷达的智能路灯系统以其高精度的人体检测能力,成为研究的热点。
二、系统设计与原理1. 系统设计基于超声波雷达的智能路灯系统主要由以下几部分组成:超声波传感器模块、控制器模块、LED灯光模块以及数据通信模块。
其中超声波传感器模块用于检测人体或车辆的存在与否,控制器模块负责处理传感器信号并控制LED灯的开关,LED灯光模块实现道路照明功能,数据通信模块可以实现系统的远程监控和管理。
2. 工作原理超声波雷达是一种利用超声波的特性进行测距的技术,其工作原理是利用超声波传感器发射超声波信号,并接收超声波信号的返回。
当超声波信号遇到障碍物时,会发生反射,并返回到传感器。
根据超声波的发射时刻与返回时刻之间的时间差,可以计算出障碍物与传感器的距离。
基于超声波雷达的智能路灯系统利用超声波传感器模块实时监测周围环境,当有人体或车辆靠近时,传感器会检测到反射超声波信号的存在,传输给控制器模块。
控制器模块根据传感器信号的变化决定是否需要开启路灯,并通过数据通信模块将相关信息传输给LED灯光模块。
LED灯光模块根据控制信号,控制路灯的亮灭程度,实现道路照明的智能控制。
三、系统实现与效果1. 系统实现基于超声波雷达的智能路灯系统,可以使用单片机或者嵌入式系统进行实现。
首先,将超声波传感器模块与控制器模块进行连接,并编写相应的程序,完成信号的读取与处理。
然后,将控制器模块与LED灯光模块连接,并设置相关的亮灭程度。
最后,将数据通信模块与控制器模块连接,配置和管理系统的远程监控功能。
2. 系统效果基于超声波雷达的智能路灯系统相比传统的路灯系统具有以下优势:(1)智能感知能力:系统能够实时感知周围环境,当有人体或车辆靠近时,能够及时响应并开启路灯,提高路边照明效果。
基于雷达传感器的简易LED智能照明方案
现在越来越多的智能照明厂商把雷达传感器集成到他们的智能控制系统里面,当有行人或者车辆出现在检测范围内,LED灯亮度增加;当行人或者车离开检测区域,LED灯亮度减小,甚至熄灭。
在这种应用中,超低功耗的雷达传感器起到了至关重要的作用。
目前,国内常见的家用智能照明雷达感应器,工作频率在5.8GHZ
和10.525GHZ。
由于这两个频段存在抗干扰能力弱、频段越来越拥堵等缺点,逐渐被对产品稳定性要求严格的厂家所淘汰。
相对而言,24GHZ频段具有频率高、抗干扰能力强、频段可利用空
间大、属于全球通用的ISM频段等优点,引起了众多智能照明厂家的重视。
但是价格和技术因素仍然制约着市场的快速发展,目前国内用户对于雷达信号处理缺少技术储备,采用相同的雷达传感器前端,不同的客户可能因为后端信号处理技术达不到要求,从而出现一些技术问题。
瑞士RFbeam公司作为一家世界领先的雷达传感器供应商,在欧洲智能照明市场蓬勃发展的驱动下,积极的推出了一系列适用于LED智能照明的雷达传感器模块。
在大幅降低雷达传感器功耗的同时,也为用户提供了方便。