(位移传感器专业英语)Operational amplifiers and applications
- 格式:ppt
- 大小:673.00 KB
- 文档页数:14

自动化专业英语常用词汇acceleration transducer 加速度传感器accumulated error 累积误差AC-DC-AC frequency converter交-直-交变频器AC (alternating current) electric drive 交流电子传动active attitude stabilization 主动姿态稳定adjoint operator 伴随算子admissible error 容许误差amplifying element 放大环节analog-digital conversion 模数转换operational amplifiers运算放大器aperiodic decomposition 非周期分解approximate reasoning 近似推理a priori estimate 先验估计articulated robot 关节型机器人asymptotic stability 渐进稳定性attained pose drift 实际位姿漂移attitude acquisition 姿态捕获AOCS (attitude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度attitude disturbance 姿态扰动automatic manual station 自动-手动操作器automaton 自动机base coordinate system 基座坐标系bellows pressure gauge 波纹管压力表 gauge测量仪器black box testing approach 黑箱测试法bottom-up development 自下而上开发boundary value analysis 边界值分析brainstorming method 头脑风暴法CAE (computer aided engineering) 计算机辅助工程CAM (computer aided manufacturing) 计算机辅助制造capacitive displacement transducer 电容式位移传感器capacity电容 displacement 位移capsule pressure gauge 膜盒压力表rectangular coordinate system直角坐标系cascade compensation 串联补偿using series or parallel capacitors用串联或者并联的电容chaos 混沌calrity 清晰性classical information pattern 经典信息模式classifier 分类器clinical control system 临床控制系统closed loop pole 闭环极点 open loop 开环closed loop transfer function 闭环传递函数c ombined pressure and vacuum gauge 压力真空表command pose 指令位姿companion matrix 相伴矩阵compatibility 相容性,兼容性compensating network 补偿网络Energy is conserved in all of its forms能量是守恒的compensation 补偿,矫正conditionally instability 条件不稳定性configuration 组态connectivity 连接性conservative system 守恒系统consistency 一致性constraint condition 约束条件control accuracy 控制精度Gyroscope陀螺仪control panel 控制屏,控制盘control system synthesis 控制系统综合corner frequency 转折频率coupling of orbit and attitude 轨道和姿态耦合critical damping 临界阻尼临界criticalDamper阻尼器critical stability 临界稳定性cross-over frequency 穿越频率,交越频率cut-off frequency 截止频率cybernetics 控制论cyclic remote control 循环遥控 cycle 循环 cycliccylindrical robot 圆柱坐标型机器人damped oscillation 阻尼振荡oscillation 振荡;振动;摆动damper 阻尼器damping ratio 阻尼比 ratio 比data acquisition 数据采集data preprocessing 数据预处理data processor 数据处理器D controller 微分控制器微分控制:Differential control 积分控制:integral control 比例控制:proportional controldescribing function 描述函数desired value 希望值真值:truth values 参考值:reference value destination 目的站detector 检出器deviation 偏差deviation alarm 偏差报警器differential dynamical system 微differential pressure level meter 差压液位计 meter=gauge 仪表 differential 差别的微分的differential pressure transmitter 差压变送器differential transformer displacement transducer 差动变压器式位移传感器differentiation element 微分环节digital filer 数字滤波器 filter 滤波器digital signal processing 数字信号处理dimension transducer 尺度传感器discrete system simulation language 离散系统仿真语言 discrete离散的不连续的displacement vibration amplitude transducer 位移振幅传感器幅度:amplitudedistrubance 扰动disturbance compensation 扰动补偿diversity 多样性divisibility 可分性domain knowledge 领域知识dominant pole 主导极点零点zero调制:modulation ;modulate 解调:demodulationcountermodulationduty ratio负载比dynamic characteristics 动态特性dynamic deviation 动态偏差dynamic error coefficient 动态误差系数dynamic input-output model 动态投入产出模型Index指数eddy current thickness meter 电涡流厚度计 meter 翻译成计 gauge 翻译成表electric conductance level meter 电导液位计electromagnetic flow transducer 电磁流量传感器electronic batching scale 电子配料秤 scale 秤electronic belt conveyor scale 电子皮带秤electronic hopper scale 电子料斗秤elevation 仰角 depression 俯角equilibrium point 平衡点error 误差estimate 估计量estimation theory 估计理论expected characteristics 希望特性failure diagnosis 故障诊断feasibility study 可行性研究feasible 可行的feasible region 可行域feature detection 特征检测feature extraction 特征抽取feedback compensation 反馈补偿Feed forward path 前馈通路前馈:feed forward 反馈feedbackFMS (flexible manufacturing system) 柔性制造系统柔性:flexible 刚性:rigidity bending deflection 弯曲挠度 deflect 偏向偏离flow sensor/transducer 流量传感器flow transmitter 流量变送器forward path 正向通路frequency converter 变频器frequency domain model reduction me thod 频域模型降阶法频域frequency response 频域响应functional decomposition 功能分解FES (functional electrical stimulation) 功能电刺激stimulate 刺激functional simularity 功能相似fuzzy logic模糊逻辑generalized least squares estimation 广义最小二乘估计geometric similarity 几何相似global optimum 全局最优goal coordination method 目标协调法graphic search 图搜索guidance system 制导系统gyro drift rate 陀螺漂移率gyrostat 陀螺体Hall displacement transducer 霍尔式位移传感器horizontal decomposition横向分解hydraulic step motor 液压步进马达I controller 积分控制器 integral 积分identifiability 可辨识性image recognition 图像识别impulse 冲量impulse function 冲击函数,脉冲函数index of merit 品质因数 index 指数inductive force transducer 电感式位移传感器感应的inductive 电感:inductance industrial automation 工业自动化inertial attitude sensor 惯性姿态敏感器inertial coordinate system 惯性坐标系information acquisition 信息采集infrared gas analyzer 红外线气体分析器 infrared 红外线红外线的ultraviolet ray紫外线的 visible light可见光inherent nonlinearity 固有非线性inherent regulation 固有调节initial deviation 初始偏差input-output model 投入产出模型instability 不稳定性integrity 整体性intelligent terminal 智能终端internal disturbance 内扰invariant embedding principle 不变嵌入原理inverse Nyquist diagram 逆奈奎斯特图investment decision 投资决策joint 关节knowledge acquisition 知识获取knowledge assimilation 知识同化knowledge representation 知识表达lag-lead compensation 滞后超前补偿Laplace transform 拉普拉斯变换large scale system 大系统least squares criterion 最小二乘准则 criterion 准则linearization technique 线性化方法linear motion electric drive 直线运动电气传动linear motion valve 直行程阀linear programming 线性规划load cell 称重传感器local optimum 局部最优local 局部log magnitude-phase diagram 对数幅相图magnitude大小的程度amplitude振幅long term memory 长期记忆Lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理magnetoelastic weighing cell 磁致弹性称重传感器magnitude-frequency characteristic 幅频特性magnitude margin 幅值裕度 margin 边缘magnitude scale factor 幅值比例尺manipulator 机械手man-machine coordination 人机协调MAP (manufacturing automation protocol) 制造自动化协议 protocol 协议marginal effectiveness 边际效益Mason‘‘s gain formula 梅森增益公式matching criterion 匹配准则maximum likelihood estimation 最大似然估计maximum overshoot 最大超调量maximum principle 极大值原理mean-square error criterion 均方误差准则minimal realization 最小实现minimum phase system 最小相位系统minimum variance estimation 最小方差估计model reference adaptive control system 模型参考适应控制系统model verification 模型验证modularization 模块化MTBF (mean time between failures) 平均故障间隔时间 mean 平均MTTF (mean time to failures) 平均无故障时间multiloop control 多回路控制multi-objective decision 多目标决策Nash optimality 纳什最优性nearest-neighbor 最近邻necessity measure 必然性侧度negative feedback 负反馈neural assembly 神经集合neural network computer 神经网络计算机Nichols chart 尼科尔斯图Nyquist stability criterion 奈奎斯特稳定判据objective function 目标函数on-line assistance 在线帮助on-off control 通断控制optic fiber tachometer 光纤式转速表optimal trajectory 最优轨迹optimization technique 最优化技术order parameter 序参数orientation control 定向控制oscillating period 振荡周期周期:period cycleoutput prediction method 输出预估法oval wheel flowmeter 椭圆齿轮流量计Over damping 过阻尼underdamping 欠阻尼PR (pattern recognition) 模式识别P control 比例控制器peak time 峰值时间penalty function method 罚函数法perceptron 感知器phase lead 相位超前 phase lag相位滞后Photoelectri c光电 tachometric transducer 光电式转速传感器piezoelectric force transducer 压电式力传感器PLC (programmable logic controller) 可编程序逻辑控制器plug braking 反接制动pole assignment 极点配置pole-zero cancellation 零极点相消polynomial input 多项式输入portfolio theory 投资搭配理论pose overshoot 位姿过调量position measuring instrument 位置测量仪posentiometric displacement transducer 电位器式位移传感器positive feedback 正反馈power system automation 电力系统自动化pressure transmitter 压力变送器primary frequency zone 主频区priority 优先级process-oriented simulation 面向过程的仿真proportional control 比例控制proportional plus derivative controller 比例微分控制器pulse duration 脉冲持续时间pulse frequency modulation control system 脉冲调频控制系统:frequency modulation 频率调制调频pulse width modulation control system 脉冲调宽控制系统PWM inverter 脉宽调制逆变器QC (quality control) 质量管理quantized noise 量化噪声ramp function 斜坡函数random disturbance 随机扰动random process 随机过程rate integrating gyro 速率积分陀螺real time telemetry 实时遥测receptive field 感受野rectangular robot 直角坐标型机器人redundant information 冗余信息regional planning model 区域规划模型regulating device 调节装载regulation 调节relational algebra 关系代数remote regulating 遥调reproducibility 再现性resistance thermometer sensor 热电阻电阻温度计传感器response curve 响应曲线return difference matrix 回差矩阵return ratio matrix 回比矩阵revolute robot 关节型机器人revolution speed transducer 转速传感器rewriting rule 重写规则rigid spacecraft dynamics 刚性航天动力学 dynamics 动力学robotics 机器人学robot programming language 机器人编程语言robust control 鲁棒控制robustness 鲁棒性root locus 根轨迹roots flowmeter 腰轮流量计rotameter 浮子流量计,转子流量计sampled-data control system 采样控制系统sampling control system 采样控制系统saturation characteristics 饱和特性scalar Lyapunov function 标量李雅普诺夫函数s-domain s域self-operated controller 自力式控制器self-organizing system 自组织系统self-reproducing system 自繁殖系统self-tuning control 自校正控制sensing element 敏感元件sensitivity analysis 灵敏度分析sensory control 感觉控制sequential decomposition 顺序分解sequential least squares estimation 序贯最小二乘估计servo control 伺服控制,随动控制servomotor 伺服马达settling time 过渡时间sextant 六分仪short term planning 短期计划short time horizon coordination 短时程协调signal detection and estimation 信号检测和估计signal reconstruction 信号重构similarity 相似性simulated interrupt 仿真中断simulation block diagram 仿真框图simulation experiment 仿真实验simulation velocity 仿真速度simulator 仿真器single axle table 单轴转台single degree of freedom gyro 单自由度陀螺翻译顺序呵呵spin axis 自旋轴spinner 自旋体stability criterion 稳定性判据stability limit 稳定极限stabilization 镇定,稳定state equation model 状态方程模型state space description 状态空间描述static characteristics curve 静态特性曲线station accuracy 定点精度stationary random process 平稳随机过程statistical analysis 统计分析statistic pattern recognition 统计模式识别steady state deviation 稳态偏差顺序翻译即可steady state error coefficient 稳态误差系数step-by-step control 步进控制step function 阶跃函数strain gauge load cell 应变式称重传感器subjective probability 主观频率supervisory computer control system 计算机监控系统sustained oscillation 自持振荡swirlmeter 旋进流量计switching point 切换点systematology 系统学system homomorphism 系统同态system isomorphism 系统同构system engineering 系统工程tachometer 转速表target flow transmitter 靶式流量变送器task cycle 作业周期temperature transducer 温度传感器tensiometer 张力计texture 纹理theorem proving 定理证明therapy model 治疗模型thermocouple 热电偶thermometer 温度计thickness meter 厚度计three-axis attitude stabilization 三轴姿态稳定three state controller 三位控制器thrust vector control system 推力矢量控制系统thruster 推力器time constant 时间常数time-invariant system 定常系统,非时变系统 invariant不变的time schedule controller 时序控制器time-sharing control 分时控制time-varying parameter 时变参数top-down testing 自上而下测试TQC (total quality control) 全面质量管理tracking error 跟踪误差trade-off analysis 权衡分析transfer function matrix 传递函数矩阵transformation grammar 转换文法transient deviation 瞬态偏差短暂的瞬间的transient process 过渡过程transition diagram 转移图transmissible pressure gauge 电远传压力表transmitter 变送器trend analysis 趋势分析triple modulation telemetering system 三重调制遥测系统turbine flowmeter 涡轮流量计Turing machine 图灵机two-time scale system 双时标系统ultrasonic levelmeter 超声物位计unadjustable speed electric drive 非调速电气传动unbiased estimation 无偏估计underdamping 欠阻尼uniformly asymptotic stability 一致渐近稳定性uninterrupted duty 不间断工作制,长期工作制unit circle 单位圆unit testing 单元测试unsupervised learing 非监督学习upper level problem 上级问题urban planning 城市规划value engineering 价值工程variable gain 可变增益,可变放大系数variable structure control system 变结构控制vector Lyapunov function 向量李雅普诺夫函数function 函数velocity error coefficient 速度误差系数velocity transducer 速度传感器vertical decomposition 纵向分解vibrating wire force transducer 振弦式力传感器vibrometer 振动计 vibrationVibrate振动viscous damping 粘性阻尼voltage source inverter 电压源型逆变器vortex precession flowmeter 旋进流量计vortex shedding flowmeter 涡街流量计WB (way base) 方法库weighing cell 称重传感器weighting factor 权因子weighting method 加权法Whittaker-Shannon sampling theorem 惠特克-香农采样定理Wiener filtering 维纳滤波w-plane w平面zero-based budget 零基预算zero-input response 零输入响应zero-state response 零状态响应z-transform z变换《信号与系统》专业术语中英文对照表第 1 章绪论信号(signal)系统(system)电压(voltage)电流(current)信息(information)电路(circuit)确定性信号(determinate signal)随机信号(random signal)一维信号(one–dimensional signal)多维信号(multi–dimensional signal)连续时间信号(continuous time signal)离散时间信号(discrete time signal)取样信号(sampling signal)数字信号(digital signal)周期信号(periodic signal)非周期信号(nonperiodic(aperiodic) signal)能量(energy)功率(power)能量信号(energy signal)功率信号(power signal)平均功率(average power)平均能量(average energy)指数信号(exponential signal)时间常数(time constant)正弦信号(sine signal)余弦信号(cosine signal)振幅(amplitude)角频率(angular frequency)初相位(initial phase)频率(frequency)欧拉公式(Euler’s formula)复指数信号(complex exponential signal)复频率(complex frequency)实部(real part)虚部(imaginary part)抽样函数 Sa(t)(sampling(Sa) function)偶函数(even function)奇异函数(singularity function)奇异信号(singularity signal)单位斜变信号(unit ramp signal)斜率(slope)单位阶跃信号(unit step signal)符号函数(signum function)单位冲激信号(unit impulse signal)广义函数(generalized function)取样特性(sampling property)冲激偶信号(impulse doublet signal)奇函数(odd function)偶分量(even component)偶数 even 奇数 odd 奇分量(odd component)正交函数(orthogonal function)正交函数集(set of orthogonal function)数学模型(mathematics model)电压源(voltage source)基尔霍夫电压定律(Kirchhoff’s voltage law(KVL))电流源(current source)连续时间系统(continuous time system)离散时间系统(discrete time system)微分方程(differential function)差分方程(difference function)线性系统(linear system)非线性系统(nonlinear system)时变系统(time–varying system)时不变系统(time–invariant system)集总参数系统(lumped–parameter system)分布参数系统(distributed–parameter system)偏微分方程(partial differential function)因果系统(causal system)非因果系统(noncausal system)因果信号(causal signal)叠加性(superposition property)均匀性(homogeneity)积分(integral)输入–输出描述法(input–output analysis)状态变量描述法(state variable analysis)单输入单输出系统(single–input and single–output system)状态方程(state equation)输出方程(output equation)多输入多输出系统(multi–input and multi–output system)时域分析法(time domain method)变换域分析法(transform domain method)卷积(convolution)傅里叶变换(Fourier transform)拉普拉斯变换(Laplace transform)第 2 章连续时间系统的时域分析齐次解(homogeneous solution)特解(particular solution)特征方程(characteristic function)特征根(characteristic root)固有(自由)解(natural solution)强迫解(forced solution)起始条件(original condition)初始条件(initial condition)自由响应(natural response)强迫响应(forced response)零输入响应(zero-input response)零状态响应(zero-state response)冲激响应(impulse response)阶跃响应(step response)卷积积分(convolution integral)交换律(exchange law)分配律(distribute law)结合律(combine law)第3 章傅里叶变换频谱(frequency spectrum)频域(frequency domain)三角形式的傅里叶级数(trigonomitric Fourier series)指数形式的傅里叶级数(exponential Fourier series)傅里叶系数(Fourier coefficient)直流分量(direct component)基波分量(fundamental component) component 分量n 次谐波分量(n th harmonic component)复振幅(complex amplitude)频谱图(spectrum plot(diagram))幅度谱(amplitude spectrum)相位谱(phase spectrum)包络(envelop)离散性(discrete property)谐波性(harmonic property)收敛性(convergence property)奇谐函数(odd harmonic function)吉伯斯现象(Gibbs phenomenon)周期矩形脉冲信号(periodic rectangular pulse signal)直角的周期锯齿脉冲信号(periodic sawtooth pulse signal)周期三角脉冲信号(periodic triangular pulse signal)三角的周期半波余弦信号(periodic half–cosine signal)周期全波余弦信号(periodic full–cosine signal)傅里叶逆变换(inverse Fourier transform)inverse 相反的频谱密度函数(spectrum density function)单边指数信号(single–sided exponential signal)双边指数信号(two–sided exponential signal)对称矩形脉冲信号(symmetry rectangular pulse signal)线性(linearity)对称性(symmetry)对偶性(duality)位移特性(shifting)时移特性(time–shifting)频移特性(frequency–shifting)调制定理(modulation theorem)调制(modulation)解调(demodulation)变频(frequency conversion)尺度变换特性(scaling)微分与积分特性(differentiation and integration)时域微分特性(differentiation in the time domain)时域积分特性(integration in the time domain)频域微分特性(differentiation in the frequency domain)频域积分特性(integration in the frequency domain)卷积定理(convolution theorem)时域卷积定理(convolution theorem in the time domain)频域卷积定理(convolution theorem in the frequency domain)取样信号(sampling signal)矩形脉冲取样(rectangular pulse sampling)自然取样(nature sampling)冲激取样(impulse sampling)理想取样(ideal sampling)取样定理(sampling theorem)调制信号(modulation signal)载波信号(carrier signal)已调制信号(modulated signal)模拟调制(analog modulation)数字调制(digital modulation)连续波调制(continuous wave modulation)脉冲调制(pulse modulation)幅度调制(amplitude modulation)频率调制(frequency modulation)相位调制(phase modulation)角度调制(angle modulation)频分多路复用(frequency–division multiplex(FDM))时分多路复用(time–division multiplex(TDM))相干(同步)解调(synchronous detection)本地载波(local carrier)载波系统函数(system function)网络函数(network function)频响特性(frequency response)幅频特性(amplitude frequency response)幅频响应相频特性(phase frequency response)无失真传输(distortionless transmission)理想低通滤波器(ideal low–pass filter)截止频率(cutoff frequency)正弦积分(sine integral)上升时间(rise time)窗函数(window function)理想带通滤波器(ideal band–pass filter)太直译了第 4 章拉普拉斯变换代数方程(algebraic equation)双边拉普拉斯变换(two-sided Laplace transform)双边拉普拉斯逆变换(inverse two-sided Laplace transform)单边拉普拉斯变换(single-sided Laplace transform)拉普拉斯逆变换(inverse Laplace transform)收敛域(region of convergence(ROC))延时特性(time delay)s 域平移特性(shifting in the s-domain)s 域微分特性(differentiation in the s-domain)s 域积分特性(integration in the s-domain)初值定理(initial-value theorem)终值定理(expiration-value)复频域卷积定理(convolution theorem in the complex frequency domain)部分分式展开法(partial fraction expansion)留数法(residue method)第 5 章策动点函数(driving function)转移函数(transfer function)极点(pole)零点(zero)零极点图(zero-pole plot)暂态响应(transient response)稳态响应(stable response)稳定系统(stable system)一阶系统(first order system)高通滤波网络(high-pass filter)低通滤波网络(low-pass filter)二阶系统(second order system)最小相位系统(minimum-phase system)高通(high-pass)带通(band-pass)带阻(band-stop)有源(active)无源(passive)模拟(analog)数字(digital)通带(pass-band)阻带(stop-band)佩利-维纳准则(Paley-Winner criterion)最佳逼近(optimum approximation)过渡带(transition-band)通带公差带(tolerance band)巴特沃兹滤波器(Butterworth filter)切比雪夫滤波器(Chebyshew filter)方框图(block diagram)信号流图(signal flow graph)节点(node)支路(branch)输入节点(source node)输出节点(sink node)混合节点(mix node)通路(path)开通路(open path)闭通路(close path)环路(loop)自环路(self-loop)环路增益(loop gain)不接触环路(disconnect loop)前向通路(forward path)前向通路增益(forward path gain)梅森公式(Mason formula)劳斯准则(Routh criterion)第 6 章数字系统(digital system)数字信号处理(digital signal processing)差分方程(difference equation)单位样值响应(unit sample response)卷积和(convolution sum)Z 变换(Z transform)序列(sequence)样值(sample)单位样值信号(unit sample signal)单位阶跃序列(unit step sequence)矩形序列 (rectangular sequence)单边实指数序列(single sided real exponential sequence)单边正弦序列(single sided exponential sequence)斜边序列(ramp sequence)复指数序列(complex exponential sequence)线性时不变离散系统(linear time-invariant discrete-time system)常系数线性差分方程(linear constant-coefficient difference equation)后向差分方程(backward difference equation)前向差分方程(forward difference equation)海诺塔(Tower of Hanoi)菲波纳西(Fibonacci)冲激函数串(impulse train)第 7 章数字滤波器(digital filter)单边 Z 变换(single-sided Z transform)双边 Z 变换(two-sided (bilateral) Z transform)幂级数(power series)收敛(convergence)有界序列(limitary-amplitude sequence)正项级数(positive series)有限长序列(limitary-duration sequence)右边序列(right-sided sequence)左边序列(left-sided sequence)双边序列(two-sided sequence)Z 逆变换(inverse Z transform)围线积分法(contour integral method)幂级数展开法(power series expansion)z 域微分(differentiation in the z-domain)序列指数加权(multiplication by an exponential sequence)z 域卷积定理(z-domain convolution theorem)帕斯瓦尔定理(Parseval theorem)传输函数(transfer function)序列的傅里叶变换(discrete-time Fourier transform:DTFT)序列的傅里叶逆变换(inverse discrete-time Fourier transform:IDTFT)幅度响应(magnitude response)相位响应(phase response)量化(quantization)编码(coding)模数变换(A/D 变换:analog-to-digital conversion)数模变换(D/A 变换:digital-to- analog conversion)第 8 章端口分析法(port analysis)状态变量(state variable)无记忆系统(memoryless system)有记忆系统(memory system)矢量矩阵(vector-matrix )常量矩阵(constant matrix )输入矢量(input vector)输出矢量(output vector)直接法(direct method)间接法(indirect method)状态转移矩阵(state transition matrix)系统函数矩阵(system function matrix)冲激响应矩阵(impulse response matrix)光学专业词汇大全Accelaration 加速度Myopia-near-sighted近视Sensitivity to Light感光灵敏度boost推进lag behind落后于Hyperopic-far-sighted远视visual sensation视觉ar Pattern条状图形approximate近似adjacent邻近的normal法线Color Difference色差V Signal Processing电视信号处理back and forth前后vibrant震动quantum leap量子越迁derive from起源自inhibit抑制,约束stride大幅前进obstruction障碍物substance物质实质主旨residue杂质criteria标准parameter参数parallax视差凸面镜 convex mirror凹面镜 concave mirror分光镜spectroscope入射角 angle of incidence出射角emergent angle平面镜 plane mirror放大率角度放大率angular magnification 放大率:magnification 折射 refraction反射 reflect干涉 interfere衍射 diffraction干涉条纹interference fringe衍射图像 diffraction fringe衍射条纹偏振polarize polarization透射transmission透射光 transmission light光强度] light intensity电磁波 electromagnetic wave振动杨氏干涉夫琅和费衍射焦距brewster Angle布鲁斯特角quarter Waveplates四分之一波片ripple波纹capacitor电容器vertical垂直的horizontal 水平的airy disk艾里斑exit pupil出[射光]瞳Entrance pupil 入瞳optical path difference光称差radius of curvature曲率半径spherical mirror球面镜reflected beam反射束YI= or your information供参考phase difference相差interferometer干涉仪ye lens物镜/目镜spherical球的field information场信息standard Lens标准透镜refracting Surface折射面principal plane主平面vertex顶点,最高点fuzzy失真,模糊light source 光源wavelength波长angle角度spectrum光谱diffraction grating衍射光栅sphere半球的DE= ens data editor Surface radius of curvature表面曲率半径surface thickness表面厚度semi-diameter半径focal length焦距field of view视场stop 光阑refractive折射reflective反射金属切削 metal cutting机床 machine tool tool 机床金属工艺学 technology of metals刀具 cutter摩擦 friction传动 drive/transmission轴 shaft弹性 elasticity频率特性 frequency characteristic误差 error响应 response定位 allocation动力学 dynamic运动学 kinematic静力学 static分析力学 analyse mechanics 力学拉伸 pulling压缩 hitting compress剪切 shear扭转 twist弯曲应力 bending stress强度 intensity几何形状 geometricalUltrasonic超声波精度 precision交流电路 AC circuit机械加工余量 machining allowance变形力 deforming force变形 deformation应力 stress硬度 rigidity热处理 heat treatment电路 circuit半导体元件 semiconductor element反馈 feedback发生器 generator直流电源 DC electrical source门电路 gate circuit逻辑代数 logic algebra磨削 grinding螺钉 screw铣削 mill铣刀 milling cutter功率 power装配 assembling流体动力学 fluid dynamics流体力学 fluid mechanics加工 machining稳定性 stability介质 medium强度 intensity载荷 load应力 stress可靠性 reliability精加工 finish machining粗加工 rough machining腐蚀 rust氧化 oxidation磨损 wear耐用度 durability随机信号 random signal离散信号 discrete signal超声传感器 ultrasonic sensor摄像头 CCD cameraLead rail 导轨合成纤维 synthetic fibre电化学腐蚀 electrochemical corrosion 车架 automotive chassis悬架 suspension转向器 redirector变速器 speed changer车间 workshop工程技术人员 engineer数学模型 mathematical model标准件 standard component零件图 part drawing装配图 assembly drawing刚度 rigidity内力 internal force位移 displacement截面 section疲劳极限 fatigue limit断裂 fracture 破裂塑性变形 plastic distortionelastic deformation 弹性变形脆性材料 brittleness material刚度准则 rigidity criterion齿轮 gearGrain 磨粒转折频率 corner frequency =break frequencyConvolution 卷积Convolution integral 卷积积分Convolution property 卷积性质Convolution sum 卷积和Correlation function 相关函数Critically damped systems 临界阻尼系统Crosss-correlation functions 互相关函数Cutoff frequencies 截至频率transistor n 晶体管diode n 二极管semiconductor n 半导体resistor n 电阻器capacitor n 电容器alternating adj 交互的amplifier n 扩音器,放大器integrated circuit 集成电路linear time invariant systems 线性时不变系统voltage n 电压,伏特数Condenser=capacitor n 电容器dielectric n 绝缘体;电解质electromagnetic adj 电磁的adj 非传导性的deflection n偏斜;偏转;偏差linear device 线性器件the insulation resistance 绝缘电阻anode n 阳极,正极cathode n 阴极breakdown n 故障;崩溃terminal n 终点站;终端,接线端emitter n 发射器collect v 收集,集聚,集中insulator n 绝缘体,绝热器oscilloscope n 示波镜;示波器gain n 增益,放大倍数forward biased 正向偏置reverse biased 反向偏置P-N junction PN结MOS(metal-oxide semiconductor)金属氧化物半导体enhancement and exhausted 增强型和耗尽型integrated circuits 集成电路analog n 模拟digital adj 数字的,数位的horizontal adj, 水平的,地平线的vertical adj 垂直的,顶点的amplitude n 振幅,广阔,丰富multimeter n 万用表frequency n 频率,周率the cathode-ray tube 阴极射线管dual-trace oscilloscope 双踪示波器signal generating device 信号发生器peak-to-peak output voltage 输出电压峰峰值sine wave 正弦波triangle wave 三角波square wave 方波amplifier 放大器,扩音器oscillator n 振荡器feedback n 反馈,回应phase n 相,阶段,状态filter n 滤波器,过滤器rectifier n整流器;纠正者band-stop filter 带阻滤波器band-pass filter 带通滤波器decimal adj 十进制的,小数的hexadecimal adj/n十六进制的binary adj 二进制的;二元的octal adj 八进制的domain n 域;领域code n代码,密码,编码v编码the Fourier transform 傅里叶变换Fast Fourier Transform 快速傅里叶变换microcontroller n 微处理器;微控制器assembly language instrucions n 汇编语言指令chip n 芯片,碎片modular adj 模块化的;模数的sensor n 传感器plug vt堵,塞,插上n塞子,插头,插销coaxial adj 同轴的,共轴的fiber n 光纤relay contact 继电接触器Artificial Intelligence 人工智能Perceptive Systems 感知系统neural network 神经网络fuzzy logic 模糊逻辑intelligent agent 智能代理electromagnetic adj 电磁的coaxial adj 同轴的,共轴的microwave n 微波charge v充电,使充电insulator n 绝缘体,绝缘物nonconductive adj非导体的,绝缘的simulation n 仿真;模拟prototype n 原型array n 排队,编队vector n 向量,矢量inverse adj倒转的,反转的n反面;相反v倒转high-performance 高精确性,高性能two-dimensional 二维的;缺乏深度的three-dimensional 三维的;立体的;真实的object-oriented programming面向对象的程序设计spectral adj 光谱的distortion n 失真,扭曲,变形wavelength n 波长refractive adj 折射的ivision Multiplexing单工传输simplex transmission半双工传输half-duplex transmission全双工传输full-duplex transmission电路交换 circuit switching数字传输技术Digital transmission technology灰度图像Grey scale images灰度级Grey scale level幅度谱Magnitude spectrum相位谱Phase spectrum频谱frequency spectrum相干解调coherent demodulation coherent相干的数字图像压缩digital image compression图像编码image encoding量化quantization人机交互man machine interface交互式会话Conversational interaction路由算法Routing Algorithm目标识别Object recognition话音变换Voice transform中继线trunk line传输时延transmission delay远程监控remote monitoring光链路optical linkhalf-duplex transmission 半双工传输accompaniment 伴随物,附属物reservation 保留,预定quotation 报价单,行情报告,引语memorandum 备忘录redundancy 备用be viewed as 被看作…be regards as 被认为是as such 本身;照此;以这种资格textual 本文的,正文的variation 变化,变量conversion 变化,转化。
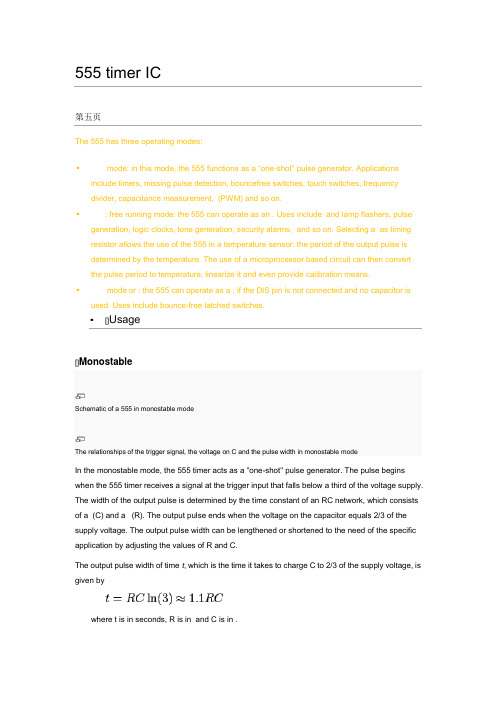
555 timer IC第五页The 555 has three operating modes:▪ mode: in this mode, the 555 functions as a "one-shot" pulse generator. Applications include timers, missing pulse detection, bouncefree switches, touch switches, frequencydivider, capacitance measurement, (PWM) and so on.▪: free running mode: the 555 can operate as an . Uses include and lamp flashers, pulse generation, logic clocks, tone generation, security alarms, and so on. Selecting a as timing resistor allows the use of the 555 in a temperature sensor: the period of the output pulse is determined by the temperature. The use of a microprocessor based circuit can then convert the pulse period to temperature, linearize it and even provide calibration means.▪ mode or : the 555 can operate as a , if the DIS pin is not connected and no capacitor is used. Uses include bounce-free latched switches.▪[]Usage[]MonostableSchematic of a 555 in monostable modeThe relationships of the trigger signal, the voltage on C and the pulse width in monostable modeIn the monostable mode, the 555 timer acts as a "one-shot" pulse generator. The pulse begins when the 555 timer receives a signal at the trigger input that falls below a third of the voltage supply. The width of the output pulse is determined by the time constant of an RC network, which consists of a (C) and a (R). The output pulse ends when the voltage on the capacitor equals 2/3 of the supply voltage. The output pulse width can be lengthened or shortened to the need of the specific application by adjusting the values of R and C.The output pulse width of time t, which is the time it takes to charge C to 2/3 of the supply voltage, is given bywhere t is in seconds, R is in and C is in .While using the timer IC in monostable mode, the main disadvantage is that the time span between the two triggering pulses must be greater than the RC time constant.[]BistableSchematic of a 555 in bistable modeIn bistable mode, the 555 timer acts as a basic flip-flop. The trigger and reset inputs (pins 2 and 4 respectively on a 555) are held high via while the threshold input (pin 6) is simply grounded. Thus configured, pulling the trigger momentarily to ground acts as a 'set' and transitions the output pin (pin 3) to Vcc (high state). Pulling the reset input to ground acts as a 'reset' and transitions the output pin to ground (low state). No capacitors are required in a bistable configuration. Pin 5 (control) is connected to ground via a small-value capacitor (usually to uF); pin 7 (discharge) is left floating.[]AstableStandard 555 astable circuitIn astable mode, the 555 timer puts out a continuous stream of rectangular pulses having a specified frequency. Resistor R1 is connected between V CC and the discharge pin (pin 7) and another resistor (R2) is connected between the discharge pin (pin 7), and the trigger (pin 2) and threshold (pin 6) pins that share a common node. Hence the capacitor is charged throughR1 and R2, and discharged only through R2, since pin 7 has low impedance to ground during output low intervals of the cycle, therefore discharging the capacitor.In the astable mode, the frequency of the pulse stream depends on the values of R1, R2 and C: The high time from each pulse is given by:and the low time from each pulse is given by:where R1 and R2 are the values of the resistors in and C is the value of the capacitor in .The power capability of R1 must be greater than .Particularly with bipolar 555s, low values of R1 must be avoided so that the output stayssaturated near zero volts during discharge, as assumed by the above equation. Otherwise the output low time will be greater than calculated above.To achieve a of less than 50% a diode can be added in parallel with R2 towards the capacitor.This bypasses R2 during the high part of the cycle so that the high interval depends only on R1 and C.Other Types Of Timers[]556 Dual timerInternal block diagramThe dual version is called 556. It features two complete 555s in a 14 pin DIL package.[]558 Quad timerThe quad version is called 558 and has 16 pins. To fit four 555s into a 16 pin package the control, voltage, and reset lines are shared by all four modules. Each module's discharge and threshold are wired together internally and called timing.[]Joystick interface circuit using the 558 quad timerThe used a quad timer 558 in monostable (or "one-shot") mode to interface up to four "game paddles" or two to the host computer.A similar circuit was used in the . In the joystick interface circuit of the IBM PC, the (C) of theRC network was generally a 10 nF〔farad〕capacitorApplicationTraffic Lights ProjectThe 555 timer IC is connected for , the clock pulses are fed to the 4017 IC via the 10K resistor. The 4017 is a 10 stage counter, therefore the sequence of the traffic lights is spread over 10 clock pulses, 4on red, 1 on red & amber, 4 on green and 1 on amber.We need red on for 5 pulses, so we connect the red LED to pin 12 which is on for the first 5 stages of the counter. The green and yellow LEDs are connected to the nescessary counter outputs, asboth LEDs need to be on for more than one count, we use diodes to avoid a short circuit situation between outputs.The capacitor and resistor on pin 15 of the 4017 are used to reset the counter to zero (red LED on) at initial power up.Electronic Dice ProjectThe 555 timer IC is connected for Astable Operation, the clock pulses are fed to the 4017 IC via the 10K resistor. The 4017 is a 10 stage counter, output 6 (pin 5) is connected to RESET (pin 15), thus giving us a 6 stage counter , outputs 0 to 5.6 of the LEDs are connected as 3 pairs, thus requiring 4 different signals, these signals come from the 4 transistors, which in turn are connected to the nescessary outputs of the 4017. Where a transistor is operated from more than one output, diodes are used to avoid a short circuit situation between outputs.Pin 13 of the 4017 (INHIBIT) is connected to +ve via a 100K resistor to stop the counter from advancing, however pressing the ROLL button will connect pin 13 to -ve and allow the counter to advance, hence, throwing the dice.4017:Divide-by-8 Counter/Divider with 8 Decoded OutputsKnight Rider Lights ProjectThe 555 timer IC is connected for Astable Operation, the clock pulses are fed to the 4017 IC via the 10K resistor. The 4017 is a 10 stage counter, each of the outputs is connected to the appropriate LED, as some LEDs need to be on for more than one count, we use diodes to avoid a short circuit situation between outputs.The capacitor and resistor on pin 15 of the 4017 are used to reset the counter to zero at initial power up.The ULN2001N used on the bulb version is a seven channel Darlington Driver IC, a small signal on one of the inputs is enough to drive the bulb on the output.Whats the difference between Monostable and Astable in IC 555?A monostable has one stable state.The stable state of a 555 in that configuration is with its output low. It will stay low until it receives a trigger, upon which it produces one high output pulse.An astable has no stable states. The states change continuously.In a 555 that means the output alternates between low and high. The 555 will start doing this as soon as power is applied to it.A good site which explains the 555's operation in detail is。

GPS专业词汇中英文对照Acquisition Time:初始定位时间Active Leg: 激活航线Adapter: 转接器、拾音器、接合器Airborne: 空运的、空降的、机载的、通过无线电传播的Alkaline: 碱性的、碱性Almanac: 历书、概略星历Anti-Spoofing: 反电子欺骗Artwork: 工艺、工艺图、原图Atomic Clock:原子钟Auto-controlling:自动控制Avionics:航空电子工学;电子设备Azimuth:方位角、方位(从当前位置到目的地的方向)Beacon:信标Bearing:方向,方位(从当前位置到目的地的方向)Bug:故障、缺陷、干扰、雷达位置测定器、窃听器Built-in:内置的、嵌入的Cellular:单元的、格网的、蜂窝的、网眼的Cinderella:水晶鞋、灰姑娘CoarseAcquisitionCode(C/A):粗捕获码ColdStart:冷启动Connector:接头、插头、转接器Constellation:星座Control?Segment:控制部分Converter:转换器、交换器、换能器、变频管、变频器、转换反应堆Coordinate:坐标Co-pilot:飞机副驾驶Cost-effective:成本低,收效大的Course:路线、路程、航线CourseDeviationIndicator(CDI):航线偏航指示CourseMadeGood(CMG):从起点到当前位置的方位CourseOverGround(COG):对地航向CourseToSteer(CTS):到目的地的最佳行驶方向CrosstrackError(XTE/XTK):偏航De-emphasis:去矫、去加重Definition:清晰度Diagonal:对角线、斜的、对角线的Distinguishability:分辨率Droppingresistors:减压电阻器、将压电阻器Datum:基准DesiredTrack(DTK):期望航线(从起点到终点的路线) DifferentialGPS(DGPS):差分GPSDilutionofPrecision(DOP):精度衰减因子Elevation:海拔、标高、高度、仰角、垂直切面、正观图Enroute:在航线上、航线飞行Ephemeris:星历EstimatedPositionError(EPE):估计位置误差EstimatedTimeEnroute(ETE):估计在途时间(已当前速度计算) EstimatedTimeofArrival(ETA):估计到达时间Front-loadingdatacartridges:前载数据卡Geodesy:大地测量学GlobalPositioningSystem(GPS):全球定位系统GLONASS:俄国全球定位系统GOTO:从当前位置到另一航路点的航线GreenwichMeanTime:格林威治时间Grid:格网坐标Heading:航向Headphone:戴在头上的收话器、双耳式耳机Headsetamplifier:头戴式放大器High-contrast:高对比度Intercom:内部通信联络系统、联络用对讲电话装置Intersection:空域交界InterfaceOption(I/O):界面接口选项Initialization:初始化InvertRoute:航线反转Jack:插座、插孔Keypad:键盘、按键Kinematic:动态的L1Frequency:GPS信号频率之一(1575.42?MHz)L2Frequency:GPS信号频率之一(1227.6?MHz)Latitude:纬度、纬线Leg(route):航段,航线的一段LiquidCrystalDisplay(LCD):液晶显示器LocalAreaAugmentationSystem(LAAS):局域增强系统Localizer:定位器、定位发射机、定位信标Longitude:经度、经线LongRangeRadioDirectionFindingSystem(LORAN):罗兰导航系统MagneticNorth:磁北MagneticVariation:磁偏角MapDisplay:地图显示Meter:米Mount:安装、支架、装配、管脚、固定件MultiplexingReceiver:多路复用接收机Multipath:多路径NauticalMile:海里(1海里=1.852米).Navigation:导航NavigationMessage:导航电文NAVigationSatelliteTimingandRanging(NAVSTAR)GlobalPositioningSystem: GPS系统的全称NationalMarineElectronicsAssociation(NMEA)美国)国家航海电子协会NMEA?0183:GPS接收机和其他航海电子产品的导航数据输出格式North-UpDisplay:GPS屏幕显示真北向上Observatory:观象台、天文台Offset:偏移量Omnidirectional:全向的、无定向的Orientation:方位、方向、定位、倾向性、向东性Panel:仪表盘、面板Panel-mount:配电盘装配ParallelChannelReceiver:并行通道接收机P-Code码Photocell:光电管、光电池、光电元件Pinpoint:极精确的、准确定位、准确测定、针尖Pixel:象素Position:位置PositionFix:定位PositionFormat:位置格式Power-on:接通电源Pre-amplifier:前置放大器PrimeMeridian:本初子午线Pseudo-RandomNoiseCode:伪随机噪声码Pseudorange:伪距Rack:齿条、支架、座、导轨Resolution:分辨率Route:航线RS-232:数据通信串口协议RadioTechnicalCommissionforMaritimeServices(RTCM):航海无线电技术委员会,差分信号格式SelectiveAvailability(SA):选择可用性Sidetone:侧音Source:信号源、辐射体SpaceSegment:空间部分SpeedOverGround(SOG):对地航速Specifcation:详述、说明书、规格、规范、特性SplitComm:分瓣通信Squelch:静噪音、静噪电路、静噪抑制电路StatuteMile:英里(1英里=1,609米)StraightLineNavigation:直线导航Strobe:闸门、起滤波作用、选通脉冲、读取脉冲TracBack按航迹返航Track-UpDisplay航向向上显示Track(TRK):航向Transceiver:步话机、收发两用机Transponder:雷达应答机、(卫星通讯的)转发器、脉冲转发机Transducer:渔探用探头、传感器Triangulation:三角测量TrueNorth:真北Turn(TRN):现时航向和目的地之间的夹角Two-way:双向的、双路的、双通的UniversalTimeCoordinated(UTC):世界协调时间UniversalTransverseMercator(UTM):通用横轴墨卡托投影U.S.C.G.:美国海岸警卫队UserInterface:用户自定义界面UserSegment:用户部分VelocityMadeGood(VMG):沿计划航线上的航速Viewingangles:视角Waypoint:航路点WideAreaAugmentationSystem(WAAS):广域差分系统WorldGeodeticSystem1984(WGS-84):1984年世界大地坐标系Windshield:防风玻璃、防风罩Y-Code:加密的P码Yoke:架、座、轭、磁轭、磁头组、偏转线圈。
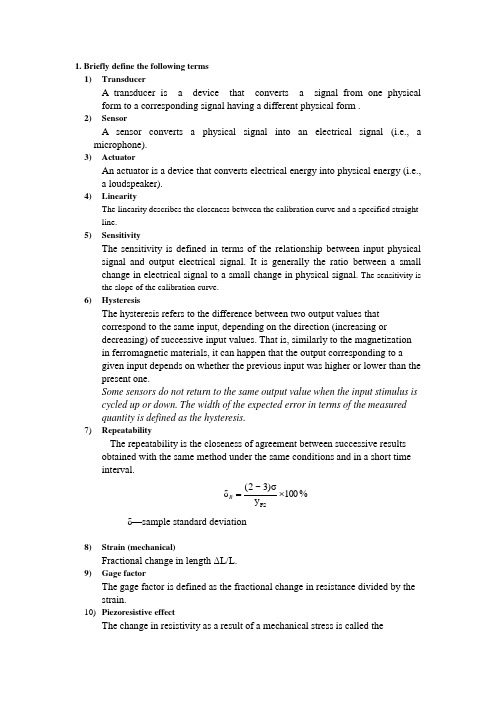
1. Briefly define the following terms1) TransducerA transducer is a device that converts a signal from one physicalform to a corresponding signal having a different physical form .2) SensorA sensor converts a physical signal into an electrical signal (i.e., amicrophone).3) ActuatorAn actuator is a device that converts electrical energy into physical energy (i.e.,a loudspeaker).4) LinearityThe linearity describes the closeness between the calibration curve and a specified straightline.5) SensitivityThe sensitivity is defined in terms of the relationship between input physicalsignal and output electrical signal. It is generally the ratio between a smallchange in electrical signal to a small change in physical signal. The sensitivity isthe slope of the calibration curve.6) HysteresisThe hysteresis refers to the difference between two output values thatcorrespond to the same input, depending on the direction (increasing ordecreasing) of successive input values. That is, similarly to the magnetizationin ferromagnetic materials, it can happen that the output corresponding to agiven input depends on whether the previous input was higher or lower than thepresent one.Some sensors do not return to the same output value when the input stimulus iscycled up or down. The width of the expected error in terms of the measuredquantity is defined as the hysteresis.7) RepeatabilityThe repeatability is the closeness of agreement between successive resultsobtained with the same method under the same conditions and in a short timeinterval.%100y σ)3~2(δFS ⨯=Rδ—sample standard deviation8) Strain (mechanical)Fractional change in length ΔL/L.9) Gage factorThe gage factor is defined as the fractional change in resistance divided by the strain.10) Piezoresistive effectThe change in resistivity as a result of a mechanical stress is called thepiezoresistive effect.11)direct piezoelectric effect.the phenomenon of generation of a voltage under mechanical stress is referred to as the piezoelectric effect.12)converse piezoelectric effect.The mechanical strain produced in the crystal under electric stress is called the converse piezoelectric effect.13)Numerical ApertureThe "acceptance cone" defines how much light will be accepted into the fiber andultimately how much remains in the fiber, and is referred to as the numerical aperture. 14)Extrinsic sensorThe optical fiber plays no part in achieving the modulating but simply acts as atransmission medium ; these are extrinsic sensors.15)Intrinsic sensors (fiber optic sensor)The optical fiber plays a major role in modulating the energy from the source; these are referred to as intrinsic sensors.16)Humiditya quantity representing the amount of water vapor in the atmosphere or a gas17)Absolute humidityAbsolute humidity is the mass of water vapor per unit volume of air.18)Relative humidityThe ratio of the actual vapor density to the theoretical maximum (saturation) vapordensity at the same temperature, expressed as a percentage. The relative humidity is the ratio of the actual vapor pressure to the saturation vapor pressure at given temperature. 19)Peltier effectWhen two dissimilar metals are connected together, a small voltage called athermojunction voltage is generated at the junction. This is called the Peltier effect.20)Law of Homogeneous ConductorsFor a given pair of homogeneous conductors forming a closed loop, the Seebeck emf depends only on the temperatures of the junctions, and not on the temperature distribution along the length of the conductors.21)Law of intermediate metalsA third (intermediate) metal wire can be inserted in series with one of the wires withoutchanging the voltage reading (provided that the two new junctions are at the sametemperature).If there is a third metal introduced into the thermocouple circuit , it will not adverselyeffect the reading, if and only if the two junctions of the third metal are at the sametemperatures .22)Bernoulli’s theoremBernoulli’s equation states that energy is approximately conserved across a constriction ina pipe.Bernoulli’s equation: P/(ρ•g) + ½v2/g + y = constant(ρ=density;g=acceleration of gravity ; v=fluid velocity; y=elevation )2. Describe the following devices and how they work1) Strain gageThe strain gauge usually consists of wire, baking, thinpaper, and lead welded. The wireis arranged in the form of a grid in order to obtain higher resistances.2) Parallel plate Capacitive SensorThe parallel plate Capacitive Sensor is a function of the distance d (cm) between theelectrodes of a structure, the surface area A (cm2) of the electrodes, and the permittivity ε0(F/m 1085.812-⨯for air) of the dielectric between the electrodes; therefore:d Ad AC 0r εεε==3) Differential Capacitive SensorA differential capacitor consists of two variable capacitors so arranged that they undergothe same change, but in opposite directions. The amplifier circuit, depending on itsconfiguration, can generate a voltage proportional to C1 - C2 or C1/C2 or (C1 - C2)/(C1 +C2).4) Variable Reluctance SensorsA typical single-coil variable-reluctance displacement sensor is illustrated in the Figurebelow. The sensor consists of three elements: a ferromagnetic core, a variable air gap, anda ferromagnetic plate.Based on change in the reluctance of a magnetic flux path. Self-inductance L of the coil is: Reluctance can be given as:5) Variable-Reluctance TachogeneratorsIt consists of a ferromagnetic, toothed wheel attached to a rotating shaft, a coil and amagnet. The wheel rotates in close proximity to the pole piece, thus causing the flux linkedby thecoil to change. The sensors output depends on the speed of the rotation of the wheeland the number of teeth.6) LVDTAn LVDT consists of three coils, a form and a core. The coils are wound on a hollow form.The primary is excited by some ac source. Flux formed by the primary is linked to the twosecondary coils, inducing an ac voltage in each coil. A core is inside the former. It canslide freely through the center of the form.In many applications, the two secondary coils are connected in series opposition.Then the two voltages will subtract; that is, the differential voltage is formed. When thecore is centrally located, the net voltage is zero. When the core is moved to one side, thenet voltage will increase.7) Compression Mode Piezoelectric Accelerometers Upright compression designs sandwich the piezoelectric crystal between a seismic mass2m WL R =0m l R S μμ=and rigid mounting base. A pre- load stud or screw secures the sensing element to themounting base.When the sensor is accelerated, the seismic mass increases or decreases the amount of compression force acting upon the crystal, and a proportional electrical output results.8)Shear mode accelerometerShear mode accelerometer designs bond, or “sandwich,” the sensing material between a center post and seismic mass. A compression ring or stud applies a preload force required to create a rigid linear structure. Under acceleration, the mass causes a shear stress to be applied to the sensing material. This stress results in a proportional electrical output by the piezoelectric material. They represent the traditional or historical accelerometer design.9)PsychrometerA psychrometer contains two identical thermometers. One sensor, the dry bulb ,measures the ambient temperature. The other sensor, the wet bulb, is in a wetted condition.In operation, water evaporation cools the wetted thermometer, resulting in a measurable difference between it and the ambient, or dry bulb measurement. When the wet bulbreaches its maximum temperature depression, the humidity is determined by comparing the wet bulb/dry bulb temperatures on a psychrometric chart10)Dunmore sensorThe Dunmore sensor uses a dilute lithium chloride solution in a polyvinylacetate binder on an insulating substrate. The resistance of the sensor, measured between a bifilar grid, is a function of the r.h. of the surrounding air.11)MOS CapacitorCCDs are typically fabricated on a p-type substrate. In order to implement the “buried” channel a thin n-type region is formed on its surface. A insulator, in the form of a silicon dioxide layer is grown on top of the n-region. Thecapacitor is finished off by placing one or more electrodes, also called gates, on top of the insulating silicon dioxide.12)Full frame transfer (FFT)It consists of a parallel CCD shift register, a serial CCD shift register and a signal sensing output amplifierThe image pixel are vertically transferred into a horizontal serial register, and the charges are horizontally shifted out.13)Interline transfer (ILT)The readout regions are interspaced between the imaging regions, and are shielded from the light.At the end of the integration period, the charges are transferred horizontally to the vertical readout registers in parallel, and then read out line-by-line in a manner similar to FFT.ILT does avoid smear but with the cost of the sensitive imaging areas.14)Frame transfer (FT)The array is grouped into two sections: the image section and the storage section. These two sections are identical, except that the storage section is shielded from the light. During the readout, charges are transfered line-by-line into the storage section by applying the same clocking to both sections. At the end of the integration period, charges in the storagesection are transferred line-by-line a manner similar to FFT.15)proximity sensorsProximity sensors detect objects that are near but without touching them. These sensors are used for near-field robotic operations.16)Time-of-flight sensorsTime-of-flight sensors estimate the range by measuring the time elapsed between thetransmission and return of a pulse17)Triangulation sensorsTriangulation sensors measure range by detecting a given point on the object surface from two different points of view at a known distance from each other. Knowing this distance and the two view angles from the respective points to the aimed surface point, a simple geometrical operation yields the range.18)Thermal Infrared DetectorsThermal infrared detectors convert incoming radiation into heat, raising the temperature of the thermal detector.19)Photon-type detectorsPhoton-type detectors react to the photons emitted by the object. The infrared radiation causes changes in the electrical properties of photon-type detectors.There are two main types of photon infrared detectors. One is called Photoconductive detector, which exhibit increased conductivity with received radiation. Another is named as Photovoltaic detector, this device converts received radiation into electric current.20)shock tubeConstruction of a shock tube is quite simple: it consists of a long tube, closed at both ends, separated into two chambers by a diaphragm, as shown in the Fig. below. A pressure differential is built up across the diaphragm, and the diaphragm is burst, either directly by the pressure differential or initiated by means of an externally controlled probe. Rupturing of the diaphragm causes a shock wave.The shock tube provides the nearest thing to a transient pressure “standard.”21)ThermocoupleA thermocouple consists of two electrical conductors made of different metals that are joined at one end.Note particularly that two junctions are always required. In general, one sense the desired or unknown temperature; this one we shall call the hot or measuring junction. The second will usually be maintained at a known fixed temperature; this one we shall refer to as the cold or reference junction. When the two junctions are at different temperatures, a voltage is developed across the junction.22)Bimetallic strip thermometerTwo dissimilar metals are bonded together into what is called a bimetallic strip. Since two metals have different coefficient of thermal expansion, one metal will expands more than does another metal as temperature increases, causing the bimetallic strip to curl upwards as sketched.23)RTDA resistance temperature detector is basically either a long, small diameter metal wirewound in a coil or an etched grid on a substrate, much like a strain gage. The resistance ofan RTD increases with increasing temperature.24)Three-wire BridgeA clever circuit designed to eliminate the lead wire resistance error is called a three-wireRTD bridge circuit, as sketched to the right.If wires A and B are perfectly matched in length (wires A and B have the same length, and thus the same resistance,), their impedance effects will cancel because each is in anopposite leg of the bridge. The third wire, C, acts as a sense lead and carries no current.25)ThermistorA thermistor is similar to an RTD, but a semiconductor material is usedinstead of a metal. A change in temperature causes the electrical resistance of the semiconductor material to change. P ositive temperature coefficient (PTC) and and negative temperature coefficient (NTC) units are available.26)Seismic (Absolute) Acc eleration PickupsIt consistis of a mass, a spring, and a damper arrangement, as shown in the Figure below.Fig……..y(t)= the absolute displacement of the mass Mx(t)= the absolute displacement of the basez-y=)()(txtz —the relative motion between the mass and the basem —massc —damping constantk —spring constantSeismic (Absolute) Displacement PickupsThe relative displacement z (the output of the sensor) is proportional to the applied displacement. A low value of ωn is needed (ωn should be much less than the lowest vibration frequency for accurate displacement measurement. )Seismic AccelerometerThe relative displacement z ( the output of the sensor) is proportional to the appliedacceleration. a high ωn is needed to measure accurately high-frequency. Increasing ωn will increase the range of frequency for which the amplitude-ratio curve is relatively flat;27)Seismic Velocity Pickup (moving coil type)One type of velocity transducer is based on a linear generator. When a coil cuts the magnetic field lines around a magnet, a voltage is induced in the coil, and this voltage is dependent on the speed of the coil relative to the magnet. The velocity pickup is designed like a displacement pickup, to have a low value of wn and to operate at angular frequencies well above wn so that the motion of the seismic mass is virtually the same as that of the casing but (almost) opposite in phase.28)The Orifice Plate FlowmetersAn orifice plate is a restriction with an opening smaller than the pipe diameter which is inserted in the pipe; Because of the smaller area the fluid velocity increases, causing acorresponding decrease in pressure.The flow ratee can be calculated from the measured pressure drop across the orifice plate 29)Ultrasonic FlowmetersUltrasonic Doppler Method:Doppler Equation :v f= K • Δf ;Doppler ultrasonic flowmeters reflect ultrasonic energy from particles, bubbles and/or eddies flowing in the fluid.Ultrasonic Transit-Time Method:The time difference between ultrasonic energy moving upstream and downstream in the fluid is used to determine fluid Velocity.Because transmitter-receiver B is situated downstream withrespect to A, the sound wave train from A to B will arrive soonerthan the train from B to A . This implies that the execution timefrom A to B is shorter than that from B to A.30)Electromagnetic FlowmetersThe measurement principle is based on Faraday’s Law of Magnetic Induction :ahomogeneous magnetic field is built up. An electrically conducting liquid flowsthrough this magnetic field.By the movement of the electrical conductor (liquid) a current gets induced which isproportional to the average flow velocity and the magnet field strength.。

仪器仪表常用英语词汇pH 计 pH meterX 射线衍射仪 X-ray diffractometerX 射线荧光光谱仪X-ray fluorescence spectrometer力测量仪表force measuring instrument孔板 orifice plate文丘里管venturi tube水表 water meter加速度仪accelerometer可编程序控制器programmable controller平衡机balancing machine皮托管Pitot tube皮带秤belt weigher光线示波器light beam oscillograph光学高温计optical pyrometer光学显微镜optical microscope光谱仪器optical spectrum instrument吊车秤crane weigher地中衡platform weigher字符图形显示器character and graphic display位移测量仪表displacement measuring instrument巡迴检测装置data logger波纹管bellows长度测量工具dimensional measuring instrument长度传感器linear transducer厚度计thickness gauge差热分析仪differential thermal analyzer扇形磁场质谱计sector magnetic field mass spectrometer 料斗秤hopper weigher核磁共振波谱仪 nuclear magnetic resonancespectrometer 气相色谱仪 gas chromatograph 浮球调节阀 float adjusting valve真空计vacuum gauge动圈仪表moving-coil instrument基地式调节仪表local-mounted controller密度计densitometer液位计liquid level meter组装式仪表package system减压阀pressure reducing valve测功器dynamometer紫外和可见光分光光度计ultraviolet-visible spectrometer 顺序控制器sequence controller微处理器microprocessor温度调节仪表temperature controller煤气表gas meter节流阀throttle valve电子自动平衡仪表electronic self-balance instrument电子秤electronic weigher电子微探针electron microprobe电子显微镜electron microscope弹簧管bourdon tube数字式显示仪表digital display instrument热流计heat-flow meter热量计heat flux meter热电阻resistance temperature热电偶thermocouple膜片和膜盒diaphragm and diaphragm capsule调节阀regulating valve噪声计noise meter应变仪strain measuring instrument湿度计hygrometer声级计sound lever meter黏度计viscosimeter转矩测量仪表torque measuring instrument转速测量仪表tachometer露点仪dew-point meter变送器transmitter仪器仪表常用术语性能特性performance characteristic确定仪器仪表功能和能力的有关参数及其定量的表述。
Analysis and Design of Analog Integrated Circuits IntroductionWith the development of integrated circuits, analog integrated circuits are becoming increasingly important in electronic systems. Analog integrated circuits are widely used in areas such as power management, signal conditioning, and wireless communication. In order to trn students in the field of analog integrated circuit design, it is necessary to design an effective teaching plan.This document will discuss the analysis and design of analog integrated circuits in a teaching context. The goal is to provide guidance in developing a course plan that covers the fundamental principles and practical techniques involved in the design of analog integrated circuits.Course ObjectivesThe objectives of this course are to:•Understand the basic principles of analog integrated circuit design.•Analyze and design basic analog building blocks such as amplifiers, filters, and oscillators.•Understand the impact of process variation, noise, and other non-idealities on the performance of analog integrated circuits.•Use computer-ded design (CAD) tools to design and simulate analog integrated circuits.Course OutlineWeek 1: Introduction to Analog Integrated Circuit Design •Course overview and expectations.•Introduction to analog integrated circuits and their applications.•Overview of the analog integrated circuit design process.•Introduction to CAD tools for analog integrated circuit design.Week 2: Analysis of Single-stage Amplifiers•Introduction to single-stage amplifiers.•Small-signal model of a common-source amplifier.•Analysis of gn, input/output impedance, and frequency response.•Design of biasing circuits for single-stage amplifiers. Week 3: Analysis of Differential Amplifiers•Introduction to differential amplifiers.•Small-signal model of a differential amplifier.•Analysis of common-mode gn, differential-mode gn, input/output impedance, and frequency response.•Design of biasing circuits for differential amplifiers. Week 4: Analysis of Operational Amplifiers•Introduction to operational amplifiers.•Ideal op-amp model and non-idealities.•Analysis of inverting and non-inverting amplifier configurations.•Analysis of the gn-bandwidth product and slew rate.Week 5: Feedback Amplifiers and Stability Analysis•Introduction to feedback amplifiers.•Analysis of feedback topologies such as voltage and current feedback.•Small-signal analysis of feedback amplifiers.•Stability analysis of feedback amplifiers.Week 6: Active Filters•Introduction to active filters.•Analysis of first-order and second-order filter configurations.•Design and simulation of active filters using CAD tools. Week 7: Oscillators•Introduction to oscillators.•Analysis of LC oscillators and crystal oscillators.•Design and simulation of oscillators using CAD tools.Week 8: Non-idealities in Analog Integrated Circuits•Impact of process variation on analog integrated circuit performance.•Analysis of noise in analog integrated circuits.•Design techniques to mitigate non-idealities in analog integrated circuits.AssessmentAssessment will be based on:•Class participation and engagement.•Homework assignments that involve design and simulation of analog integrated circuits.•Midterm and final exam.ConclusionThis course plan provides a solid framework for teaching the fundamentals of analog integrated circuit design. By covering topics such as single-stage amplifiers, differential amplifiers, operational amplifiers, and feedback amplifiers, students will gn a thorough understanding of essential building blocks used in analog integrated circuits. The inclusion of active filters and oscillators will provide practical examples of analog integrated circuit design. Additionally, the focus on non-idealities and process variation prepares students for real-world challenges in analog integrated circuit design.。
自动化专业英语常用词汇acceleration transducer 加速度传感器accumulatederror 累积误差AC-DC-AC frequency converter 交 -直 -交变频器AC (alternating current)electric drive 交流电子传动active attitudestabilization 主动姿态稳定adjointoperator 伴随算子admissibleerror 容许误差amplifyingelement 放大环节analog-digital conversion 模数转换operationalamplifiers 运算放大器aperiodic decomposition 非周期分解approximate reasoning 近似推理a prioriestimate 先验估计articulatedrobot 关节型机器人asymptoticstability 渐进稳定性attained posedrift 实际位姿漂移attitudeacquisition 姿态捕获AOCS ( attitude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度attitude disturbance 姿态扰动automatic manual station 自动 -手动操作器automaton 自动机base coordinate system 基座坐标系bellows pressure gauge 波纹管压力表gauge 测量仪器black box testingapproach 黑箱测试法bottom-up development 自下而上开发boundary value analysis 边界值分析brainstorming method 头脑风暴法CAE (computer aided engineering) 计算机辅助工程CAM (computer aided manufacturing) 计算机辅助制造capacitive displacement transducer 电容式位移传感器capacity 电容displacement 位移capsule pressure gauge 膜盒压力表rectangular coordinatesystem 直角坐标系cascade compensation 串联补偿using series or parallel capacitors 用串联或者并联的电容chaos 混沌calrity 清晰性classical informationpattern 经典信息模式classifier 分类器clinical control system 临床控制系统closed loop pole 闭环极点open loop 开环closed loop transfer function 闭环传递函数combined pressure and vacuum gauge 压力真空表command pose 指令位姿companion matrix 相伴矩阵compatibility 相容性,兼容性compensating network 补偿网络Energy is conserved in all of its forms 能量是守恒的compensation 补偿,矫正conditionally instability 条件不稳定性configuration 组态connectivity 连接性conservative system 守恒系统consistency 一致性constraint condition 约束条件control accuracy 控制精度Gyroscope 陀螺仪control panel 控制屏,控制盘control system synthesis 控制系统综合corner frequency 转折频率coupling of orbit and attitude 轨道和姿态耦合critical damping 临界阻尼Damper 阻尼器临界 criticalcritical stability 临界稳定性cross-overfrequency 穿越频率,交越频率cut-off frequency 截止频率cybernetics 控制论cyclic remotecontrol 循环遥控cycle 循环 cyclic cylindrical robot 圆柱坐标型机器人damped oscillation 阻尼振荡oscillation 振荡;振动;摆动damper 阻尼器damping ratio 阻尼比ratio 比data acquisition 数据采集data preprocessing 数据预处理data processor 数据处理器D controller 微分控制器微分控制: Differentialcontrol积分控制: integralcontrol 比例控制: proportional controldescribing function 描述函数desired value 希望值真值: truthvalues 参考值: reference valuedestination 目的站detector 检出器deviation 偏差deviation alarm 偏差报警器differential dynamicalsystem 微differential pressure level meter差压液位计 meter=gauge仪表differen tial差别的 微分的differential pressure transmitter 差压变送器differential transformer displacement transducerdifferentiation element 微分环节差动变压器式位移传感器digital filer 数字滤波器 fil ter滤波器digital signal processing数字信号处理dimension transducer 尺度传感器discrete system simulation language 离散系统仿真语言discrete 离散的 不连续的displacement vibration amplitude transducer 位移振幅传感器 幅度: amplitude distrubance 扰动disturbance compensation 扰动补偿diversit y 多样性 divisibi lity 可分性domain knowledge 领域知识dominant pole 主导极点 零点 zero 调制: modulation ; modulate 解调: demodulation countermodulatio n duty ratio 负载 比 dynamic characteristics 动态特性 dynamic deviation 动态偏差dynamic error coefficient 动态误差系数 dynamic input-output model 动态投入产出模型Index 指数eddy current thickness meter 电涡流厚度计 meter 翻译成计 gauge 翻译成表 electric conductance level meter 电导液位计 electromagnetic flow transducer 电磁流量传感器electronic batching scale 电子配料秤 scale 秤electronic belt conveyor scale 电子皮带秤 electronic hopper scale 电子料斗秤elevation 仰角depression 俯角equilibrium point 平衡点error 误差estimate 估计量estimation theory 估计理论expected characteristics 希望特性failure diagnosis 故障诊断feasibility study 可行性研究feasible 可行的feasible region 可行域feature detection 特征检测feature extraction 特征抽取feedback compensation 反馈补偿Feed forward path 前馈通路前馈: feed forward 反馈 feedbackFMS ( flexible manufacturing system) 柔性制造系统柔性: flexible 刚性: rigiditybending deflection 弯曲挠度deflect 偏向偏离flow sensor/transducer流量传感器flow transmitter 流量变送器forward path 正向通路frequency converter 变频器frequency domain model reduction me thod 频域模型降阶法频域frequency response 频域响应functional decomposition 功能分解FES (functional electrical stimulation ) 功能电刺激stimulate 刺激functional simularity 功能相似fuzzy logic 模糊逻辑generalized least squares estimation 广义最小二乘估计geometric similarity 几何相似global optimum 全局最优goal coordinationmethod 目标协调法graphic search 图搜索guidance system 制导系统gyro drift rate 陀螺漂移率gyrostat 陀螺体Hall displacement transducer 霍尔式位移传感器horizontaldecomposition 横向分解hydraulic step motor 液压步进马达Icontroller 积分控制器integral 积分identifiability 可辨识性imagerecognition 图像识别impulse 冲量impulsefunction 冲击函数,脉冲函数index of merit 品质因数index 指数inductive force transducer 电感式位移传感器感应的inductive电感:inductanceindustrial automation 工业自动化inertial attitude sensor 惯性姿态敏感器inertial coordinate system 惯性坐标系information acquisition 信息采集infrared gas analyzer 红外线气体分析器infrared 红外线红外线的ultraviolet ray 紫外线的visible light可见光inherent nonlinearity 固有非线性inherent regulation 固有调节initial deviation 初始偏差input-output model 投入产出模型instability 不稳定性integrity 整体性intelligent terminal 智能终端internal disturbance 内扰invariant embedding principle 不变嵌入原理inverse Nyquist diagram 逆奈奎斯特图investment decision 投资决策joint 关节knowledge acquisition 知识获取knowledge assimilation 知识同化knowledge representation 知识表达lag-lead compensation滞后超前补偿Laplacetransform 拉普拉斯变换large scale system 大系统least squares criterion 最小二乘准则criterion 准则linearizationtechnique 线性化方法linear motion electricdrive 直线运动电气传动linear motionvalve 直行程阀linearprogramming 线性规划load cell 称重传感器local optimum 局部最优local 局部log magnitude-phase diagram对数幅相图magnitude大小的程度amplitude 振幅long term memory 长期记忆Lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理magnetoelastic weighing cell 磁致弹性称重传感器magnitude-frequency characteristic 幅频特性magnitude margin幅值裕度margin边缘magnitude scalefactor幅值比例尺manipulator机械手man-machine coordination人机协调MAP (manufacturing automation protocol) 制造自动化协议protocol 协议marginal effectiveness 边际效益Mason‘‘ s gain formula 梅森增益公式matchingcriterion匹配准则maximum likelihood estimation 最大似然估计maximum overshoot 最大超调量maximum principle 极大值原理mean-square error criterion 均方误差准则minimal realization 最小实现minimum phase system 最小相位系统minimum variance estimation 最小方差估计model reference adaptive control system 模型参考适应控制系统 model verification 模型验证modularization 模块化mean 平均MTBF (mean time between failures) 平均故障间隔时间 MTTF (mean time to failures) 平均无故障时间multiloop control 多回路控制multi-objective decision 多目标决策Nash optimality 纳什最优性nearest-neighbor 最近邻necessity measure 必然性侧度negative feedback 负反馈neural assembly 神经集合neural network computer 神经网络计算机Nichols chart 尼科尔斯图Nyquist stability criterion 奈奎斯特稳定判据objective function 目标函数on-line assistance 在线帮助on-off control 通断控制optic fiber tachometer 光纤式转速表optimal trajectory 最优轨迹optimization technique 最优化技术order parameter 序参数orientation control 定向控制oscillating period 振荡周期周期:period cycleoutput prediction method 输出预估法oval wheel flowmeter 椭圆齿轮流量计Over damping 过阻尼underdamping 欠阻尼PR (pattern recognition) 模式识别P control 比例控制器peak time 峰值时间penalty function method 罚函数法perceptron 感知器phase lead 相位超前phase lag相位滞后Photoelectri c光电tachometric transducer光电式转速传感器piezoelectric force transducer压电式力传感器PLC (programmable logic controller) 可编程序逻辑控制器plug braking 反接制动pole assignment 极点配置pole-zero cancellation零极点相消polynomial input 多项式输入portfolio theory 投资搭配理论pose overshoot位姿过调量position measuring instrument 位置测量仪posentiometric displacement transducer 电位器式位移传感器positive feedback 正反馈power system automation 电力系统自动化pressure transmitter 压力变送器primary frequency zone 主频区priority 优先级process-oriented simulation 面向过程的仿真proportional control 比例控制proportional plus derivative controller 比例微分控制器pulse duration 脉冲持续时间pulse frequency modulation control system 脉冲调频控制系统: frequency modulation 频率调制调频pulse width modulation control system 脉冲调宽控制系统PWM inverter 脉宽调制逆变器QC (qualitycontrol) 质量管理quantized noise 量化噪声ramp function 斜坡函数randomdisturbance 随机扰动random process 随机过程rate integratinggyro 速率积分陀螺real time telemetry 实时遥测receptive field 感受野rectangular robot 直角坐标型机器人redundantinformation 冗余信息regional planningmodel 区域规划模型regulatingdevice 调节装载regulation 调节relationalalgebra 关系代数remoteregulating 遥调reproducibility 再现性resistance thermometer sensor 热电阻 电阻温度计传感器response curve 响应曲线return difference matrix 回差矩阵 return ratio matrix回比矩阵revolute robot 关节型机器人revolution speed transducer 转速传感器 rewriting rule重写规则rigid spacecraft dynamics 刚性航天动力学 dynamics 动力学robotics 机器人学robot programming language 机器人编程语言 robust control 鲁棒控制 robustness 鲁棒性 root locus 根轨迹 roots flowmeter腰轮流量计rotameter 浮子流量计,转子流量计sampled-data control system 采样控制系统sampling control system 采样控制系统saturation characteristics 饱和特性 scalar Lyapunov function 标量李雅普诺夫函数s-domain s 域self-operated controller 自力式控制器 self-organizing system 自组织系统self-reproducing system 自繁殖系统self-tuning control 自校正控制sensing element 敏感元件 sensitivity analysis 灵敏度 分析sensory control 感觉控制 sequential decomposition顺序分解sequential least squares estimation 序贯最小二乘估计 servo control 伺服控制,随动控制servomotor settling time伺服马达过渡时间 sextan t六分仪short term planning短期计划short time horizon coordinationsignal detection and estimation短时程协调信号检测和估计signal reconstruction 信号重构similarity 相似性simulated interrupt 仿真中断simulation block diagram 仿真框图simulation experiment 仿真实验simulation velocity 仿真速度simulator 仿真器single axle table 单轴转台single degree of freedom gyro 单自由度陀螺翻译顺序呵呵spin axis 自旋轴spinner 自旋体stability criterion 稳定性判据stabilitylimit 稳定极限stabilization 镇定,稳定state equation model 状态方程模型state space description 状态空间描述static characteristicscurve 静态特性曲线station accuracy 定点精度stationary randomprocess 平稳随机过程statistical analysis 统计分析statistic patternrecognition 统计模式识别steady state deviation稳态偏差顺序翻译即可steady state error coefficient稳态误差系数step-by-step control步进控制step function 阶跃函数strain gauge load cell 应变式称重传感器subjective probability 主观频率supervisory computer control system 计算机监控系统sustained oscillation 自持振荡swirlmeter 旋进流量计switching point 切换点systematology 系统学system homomorphism 系统同态system isomorphism 系统同构system engineering 系统工程tachometer 转速表target flow transmitter 靶式流量变送器task cycle 作业周期temperature transducer 温度传感器tensiometer 张力计texture 纹理theorem proving 定理证明therapy model 治疗模型thermocouple 热电偶thermometer 温度计thickness meter 厚度计three-axis attitude stabilization 三轴姿态稳定three state controller 三位控制器thrust vector control system 推力矢量控制系统推力器thrustertime constant 时间常数time-invariant system 定常系统,非时变系统invariant不变的时序控制器time schedulecontrollertime-sharing control 分时控制time-varying parameter 时变参数top-down testing 自上而下测试全面质量管理TQC (total qualitycontrol)tracking error 跟踪误差trade-off analysis 权衡分析transfer function matrix传递函数矩阵transformation grammar 转换文法transient deviation 瞬态偏差短暂的瞬间的transient process过渡过程transition diagram 转移图transmissible pressure gauge 电远传压力表transmitter 变送器trend analysis 趋势分析triple modulation telemetering system 三重调制遥测系统turbine flowmeter 涡轮流量计Turing machine 图灵机two-time scale system 双时标系统ultrasonic levelmeter 超声物位计unadjustable speed electric drive 非调速电气传动unbiased estimation 无偏估计underdamping 欠阻尼uniformly asymptotic stability 一致渐近稳定性uninterrupted duty 不间断工作制,长期工作制unit circle 单位圆unit testing 单元测试unsupervised learing 非监督学习upper level problem 上级问题urban planning 城市规划value engineering 价值工程variable gain 可变增益,可变放大系数variable structure control system 变结构控制function 函数vector Lyapunov function 向量李雅普诺夫函数velocity error coefficient 速度误差系数velocity transducer 速度传感器 vertical decomposition纵向分解vibrating wire force transducer 振弦式力传感器vibrometer 振动计vibrationVibrate 振动viscousdamping 粘性阻尼voltage source inverter 电压源型逆变器vortex precessionflowmeter 旋进流量计vortex sheddingflowmeter 涡街流量计WB (way base) 方法库weighing cell 称重传感器weightingfactor 权因子weightingmethod 加权法Whittaker-Shannon sampling theorem 惠特克 -香农采样定理Wiener filtering维纳滤波w- plane w 平面zero-based budget 零基预算zero-input response零输入响应zero-state response零状态响应z-transform z 变换《信号与系统》专业术语中英文对照表第1章绪论信号( signal)系统( system)电压( voltage)电流( current)信息( information)电路( circuit )网络( network)确定性信号( determinate signal)随机信号( random signal)一维信号( one–dimensional signal)多维信号( multi –dimensional signal)连续时间信号( continuous time signal)离散时间信号( discrete time signal)取样信号( sampling signal)数字信号( digital signal)周期信号( periodic signal)非周期信号( nonperiodic(aperiodic) signal)能量( energy)功率( power)能量信号( energy signal)功率信号( power signal)平均功率( average power)平均能量( average energy)指数信号( exponential signal)时间常数( time constant)正弦信号( sine signal)余弦信号( cosine signal)振幅( amplitude)角频率( angular frequency)初相位( initial phase)周期( period)频率( frequency)欧拉公式( Euler ’s formula)复指数信号( complex exponential signal)复频率( complex frequency)实部( real part)虚部( imaginary part)抽样函数Sa(t)(sampling(Sa) function)偶函数( even function)奇异函数( singularity function )奇异信号( singularity signal)单位斜变信号( unit ramp signal)斜率( slope)单位阶跃信号( unit step signal)符号函数( signum function)单位冲激信号( unit impulse signal)广义函数( generalized function)取样特性( sampling property)冲激偶信号( impulse doublet signal)奇函数( odd function)偶分量(even component)偶数even 奇数odd 奇分量(odd component)正交函数( orthogonal function)正交函数集( set of orthogonal function)数学模型( mathematics model)电压源( voltage source)基尔霍夫电压定律( Kirchhoff ’s voltage law(KVL ))电流源( current source)连续时间系统( continuous time system)离散时间系统( discrete time system)微分方程( differential function)差分方程( difference function)线性系统( linear system)非线性系统( nonlinear system)时变系统( time–varying system)时不变系统( time–invariant system)集总参数系统( lumped–parameter system)分布参数系统( distributed–parameter system)偏微分方程( partial differential function )因果系统( causal system)非因果系统( noncausal system)因果信号( causal signal)叠加性( superposition property)均匀性( homogeneity)积分( integral)输入–输出描述法( input–output analysis)状态变量描述法( state variable analysis)单输入单输出系统( single–input and single–output system)状态方程( state equation)输出方程( output equation)多输入多输出系统( multi –input and multi–output system)时域分析法( time domain method)变换域分析法( transform domain method)卷积( convolution)傅里叶变换( Fourier transform)拉普拉斯变换( Laplace transform)第 2 章连续时间系统的时域分析齐次解( homogeneous solution)特解( particular solution)特征方程( characteristic function)特征根( characteristic root)固有(自由)解( natural solution)强迫解( forced solution)起始条件( original condition)初始条件( initial condition)自由响应( natural response)强迫响应( forced response)零输入响应( zero-input response)零状态响应( zero-state response)冲激响应( impulse response)阶跃响应( step response)卷积积分( convolution integral)交换律( exchange law)分配律( distribute law)结合律( combine law)第3 章傅里叶变换频谱( frequency spectrum)频域( frequency domain)三角形式的傅里叶级数(trigonomitric Fourier series)指数形式的傅里叶级数(exponential Fourier series)傅里叶系数( Fourier coefficient)直流分量( direct component)基波分量( fundamental component)component分量n 次谐波分量( nth harmonic component)复振幅( complex amplitude)频谱图( spectrum plot(diagram))幅度谱( amplitude spectrum)相位谱( phase spectrum)包络( envelop)离散性( discrete property)谐波性( harmonic property)收敛性( convergence property)奇谐函数( odd harmonic function)吉伯斯现象( Gibbs phenomenon)周期矩形脉冲信号( periodic rectangular pulse signal)直角的周期锯齿脉冲信号( periodic sawtooth pulse signal)周期三角脉冲信号( periodic triangular pulse signal)三角的周期半波余弦信号( periodic half–cosine signal)周期全波余弦信号( periodic full –cosine signal)傅里叶逆变换(inverse Fourier transform)inverse 相反的频谱密度函数( spectrum density function)单边指数信号( single–sided exponential signal)双边指数信号( two–sided exponential signal)对称矩形脉冲信号( symmetry rectangular pulse signal)线性( linearity )对称性( symmetry)对偶性( duality)位移特性( shifting)时移特性( time–shifting)频移特性( frequency–shifting )调制定理( modulation theorem)调制( modulation)解调( demodulation)变频( frequency conversion)尺度变换特性( scaling)微分与积分特性( differentiation and integration)时域微分特性( differentiation in the time domain)时域积分特性( integration in the time domain)频域微分特性( differentiation in the frequency domain)频域积分特性( integration in the frequency domain)卷积定理( convolution theorem)时域卷积定理( convolution theorem in the time domain)频域卷积定理( convolution theorem in the frequency domain)取样信号( sampling signal)矩形脉冲取样( rectangular pulse sampling)自然取样( nature sampling)冲激取样( impulse sampling)理想取样( ideal sampling)取样定理( sampling theorem)调制信号( modulation signal)载波信号( carrier signal)已调制信号( modulated signal)模拟调制( analog modulation)数字调制( digital modulation)连续波调制( continuous wave modulation)脉冲调制( pulse modulation)幅度调制( amplitude modulation)频率调制( frequency modulation)相位调制( phase modulation)角度调制( angle modulation)频分多路复用( frequency–division multiplex (FDM ))时分多路复用( time–division multiplex (TDM ))相干(同步)解调( synchronous detection)本地载波( local carrier)载波系统函数( system function)网络函数( network function)频响特性( frequency response)幅频特性( amplitude frequency response)幅频响应相频特性( phase frequency response)无失真传输( distortionless transmission)理想低通滤波器(ideal low–pass filter)截止频率( cutoff frequency)正弦积分( sine integral)上升时间( rise time)窗函数( window function )理想带通滤波器( ideal band–pass filter)太直译了第 4 章拉普拉斯变换代数方程( algebraic equation)双边拉普拉斯变换( two-sided Laplace transform)双边拉普拉斯逆变换( inverse two-sided Laplace transform)单边拉普拉斯变换( single-sided Laplace transform)拉普拉斯逆变换( inverse Laplace transform)收敛域( region of convergence( ROC))延时特性( time delay)s 域平移特性( shifting in the s-domain)s域微分特性( differentiation in the s-domain)s 域积分特性( integration in the s-domain)初值定理( initial-value theorem)终值定理( expiration-value)复频域卷积定理( convolution theorem in the complex frequency domain)部分分式展开法( partial fraction expansion)留数法( residue method)第 5 章策动点函数( driving function )转移函数( transfer function)极点( pole)零点( zero)零极点图( zero-pole plot)暂态响应( transient response)稳态响应( stable response)稳定系统( stable system)一阶系统( first order system)高通滤波网络( high-pass filter)低通滤波网络( low-pass filter)二阶系统( second order system)最小相位系统( minimum-phase system)高通( high-pass)带通( band-pass)带阻( band-stop)有源( active)无源( passive)模拟( analog)数字( digital)通带( pass-band)阻带( stop-band)佩利-维纳准则( Paley-Winner criterion)最佳逼近( optimum approximation)过渡带( transition-band)通带公差带( tolerance band)巴特沃兹滤波器( Butterworth filter )切比雪夫滤波器( Chebyshew filter)方框图( block diagram)信号流图( signal flow graph)节点( node)支路( branch)输入节点( source node)输出节点( sink node)混合节点( mix node)通路( path)开通路( open path)闭通路( close path)环路( loop)自环路( self-loop)环路增益( loop gain)不接触环路( disconnect loop)前向通路( forward path)前向通路增益( forward path gain)梅森公式( Mason formula)劳斯准则( Routh criterion)第 6 章数字系统( digital system)数字信号处理( digital signal processing)差分方程( difference equation)单位样值响应( unit sample response)卷积和( convolution sum)Z 变换( Z transform)序列( sequence)样值( sample)单位样值信号( unit sample signal)单位阶跃序列( unit step sequence)矩形序列(rectangular sequence)单边实指数序列( single sided real exponential sequence)单边正弦序列( single sided exponential sequence)斜边序列( ramp sequence)复指数序列( complex exponential sequence)线性时不变离散系统( linear time-invariant discrete-time system)常系数线性差分方程( linear constant-coefficient difference equation)后向差分方程( backward difference equation)前向差分方程( forward difference equation)海诺塔( Tower of Hanoi)菲波纳西( Fibonacci)冲激函数串( impulse train)第7 章数字滤波器( digital filter )单边 Z 变换( single-sided Z transform)双边 Z 变换 (two-sided (bilateral) Z transform)幂级数( power series)收敛( convergence)有界序列( limitary-amplitude sequence)正项级数( positive series)有限长序列( limitary-duration sequence)右边序列( right-sided sequence)左边序列( left-sided sequence)双边序列( two-sided sequence)Z逆变换( inverse Z transform)围线积分法( contour integral method)幂级数展开法( power series expansion)z域微分( differentiation in the z-domain)序列指数加权( multiplication by an exponential sequence)z域卷积定理( z-domain convolution theorem)帕斯瓦尔定理( Parseval theorem)传输函数( transfer function)序列的傅里叶变换( discrete-time Fourier transform:DTFT)序列的傅里叶逆变换( inverse discrete-time Fourier transform:IDTFT )幅度响应( magnitude response)相位响应( phase response)量化( quantization)编码( coding)模数变换( A/D 变换: analog-to-digital conversion)数模变换( D/A 变换: digital-to- analog conversion)第8 章端口分析法( port analysis)状态变量( state variable)无记忆系统( memoryless system)有记忆系统( memory system)矢量矩阵( vector-matrix )常量矩阵( constant matrix )输入矢量(input vector)输出矢量( output vector)直接法( direct method)间接法( indirect method)状态转移矩阵( state transition matrix)系统函数矩阵( system function matrix)冲激响应矩阵( impulse response matrix)光学专业词汇大全Accelaration 加速度Myopia-near-sighted 近视Sensitivity to Light 感光灵敏度boost 推进lag behind 落后于Hyperopic-far-sighted 远视visual sensation 视觉ar Pattern 条状图形approximate 近似adjacent 邻近的normal 法线Color Difference 色差V Signal Processing 电视信号处理back and forth 前后vibrant 震动quantum leap 量子越迁derive from 起源自inhibit 抑制 ,约束stride 大幅前进obstruction 障碍物substance 物质实质主旨residue 杂质criteria 标准parameter 参数parallax 视差凸面镜convex mirror凹面镜concave mirror分光镜 spectroscope入射角angle of incidence 出射角emergent angle平面镜plane mirror放大率角度放大率 angularmagnification放大率:magnification折射refraction反射reflect干涉 interfere衍射diffraction干涉条纹interference fringe衍射图像diffraction fringe 衍射条纹偏振polarize polarization透射 transmission透射光transmission light光强度 ] light intensity电磁波electromagnetic wave振动杨氏干涉夫琅和费衍射焦距brewster Angle 布鲁斯特角quarter Waveplates 四分之一波片ripple 波纹capacitor 电容器vertical 垂直的horizontal 水平的airy disk 艾里斑exit pupil 出[ 射光 ]瞳Entrance pupil 入瞳optical path difference 光称差radius of curvature 曲率半径spherical mirror 球面镜reflected beam 反射束YI= or your information 供参考phase difference 相差interferometer 干涉仪ye lens 物镜 /目镜spherical 球的field information 场信息standard Lens 标准透镜refracting Surface 折射面principal plane 主平面vertex 顶点 ,最高点fuzzy 失真 ,模糊light source 光源wavelength 波长angle 角度spectrum 光谱diffraction grating 衍射光栅sphere 半球的DE= ens data editor Surface radius of curvature 表面曲率半径surface thickness 表面厚度semi-diameter 半径focal length 焦距field of view 视场stop 光阑refractive 折射reflective 反射机械专业英语词汇(大全)金属切削metal cutting机床machine tool tool 机床金属工艺学technology of metals刀具 cutter摩擦 friction传动 drive/transmission轴shaft弹性 elasticity频率特性frequency characteristic误差 error响应 response定位 allocation动力学dynamic运动学kinematic静力学static分析力学analyse mechanics 力学拉伸 pulling压缩 hitting compress剪切 shear扭转 twist弯曲应力bending stress强度 intensity几何形状geometricalUltrasonic 超声波精度 precision交流电路AC circuit机械加工余量machining allowance变形力deforming force变形 deformation应力 stress硬度 rigidity热处理heat treatment电路 circuit半导体元件semiconductor element反馈 feedback发生器generator直流电源DC electrical source门电路 gate circuit逻辑代数logic algebra磨削grinding螺钉 screw铣削 mill铣刀 milling cutter功率 power装配 assembling流体动力学fluid dynamics流体力学fluid mechanics加工 machining稳定性 stability介质 medium强度 intensity载荷 load应力 stress可靠性 reliability精加工 finish machining粗加工 rough machining腐蚀 rust氧化 oxidation磨损 wear耐用度durability随机信号random signal离散信号discrete signal超声传感器ultrasonic sensor摄像头CCD cameraLead rail 导轨合成纤维synthetic fibre电化学腐蚀electrochemical corrosion车架 automotive chassis悬架 suspension转向器redirector变速器speed changer车间 workshop工程技术人员engineer数学模型mathematical model标准件standard component零件图part drawing装配图assembly drawing刚度 rigidity内力 internal force位移 displacement截面 section疲劳极限fatigue limit断裂 fracture 破裂塑性变形plastic distortionelastic deformation 弹性变形脆性材料brittleness material刚度准则rigidity criterion齿轮gearGrain 磨粒转折频率corner frequency =break frequencyConvolution Convolution integral Convolution property Convolution sum 卷积卷积积分卷积性质卷积和Correlation function Critically damped systems Crosss-correlation functions Cutoff frequencies 相关函数临界阻尼系统互相关函数截至频率transistor diode semiconduct or nn晶体管二极管n半导体resistor n 电阻器capacitor n 电容器alternating adj 交互的amplifier n 扩音器,放大器integrated circuit 集成电路linear time invariant systems 线性时不变系统voltage n 电压,伏特数Condenser= capacitor n 电容器dielectric electromagnetic adj 电磁的adj 非传导性的deflection n 偏斜;偏转;偏差linear device 线性器件the insulation resistance 绝缘电阻anode n 阳极,正极cathode n 阴极breakdown n 故障;崩溃terminal n 终点站;终端,接线端emitter n 发射器collect v 收集,集聚,集中insulator n 绝缘体,绝热器oscilloscope n 示波镜;示波器gain n 增益,放大倍数forward biased 正向偏置reverse biased 反向偏置P-N junction PN 结MOS( metal-oxide semiconductor )金属氧化物半导体enhancement and exhausted 增强型和耗尽型integrated circuits 集成电路analog n 模拟digital adj 数字的,数位的horizontal adj, 水平的,地平线的vertical adj 垂直的,顶点的amplitude n 振幅,广阔,丰富multimeter n 万用表frequency n 频率,周率the cathode-ray tube 阴极射线管dual-trace oscilloscope 双踪示波器signal generating device 信号发生器peak-to-peak output voltage 输出电压峰峰值sine wave 正弦波triangle wave 三角波square wave 方波amplifier 放大器,扩音器oscillator n 振荡器feedback n 反馈,回应phase n 相,阶段,状态filter n 滤波器,过滤器rectifier n 整流器;纠正者band-stop filter 带阻滤波器band-pass filter 带通滤波器decimal adj 十进制的,小数的hexadecimal adj/n 十六进制的binary adj 二进制的;二元的octaladj八进制的n绝缘体;电解质domain n 域;领域code n 代码,密码,编码 v 编码 the Fourier transform 傅里叶变换 Fast Fourier Transform 快速傅里叶变换 microcontro ller n 微处理器;微控制器 assembly language instrucions n 汇编语言指令 chip n 芯片,碎片modular adj 模块化的;模数的 sensor n 传感器plugvt 堵,塞,插上 n 塞子,插头,插销coaxial adj 同轴的,共轴的fiber n 光纤 relay contact 继电接触器 ArtificialIntelligence 人工智能 Perceptive Systems 感知系统 neural network 神经网络 fuzzy logic 模糊逻辑intelligent agent 智能代理 electromagn etic adj 电磁的coaxial adj 同轴的,共轴的 microwav e n 微波charge v 充电,使充电 insulato r n 绝缘体,绝缘物 nonconducti ve adj 非导体的,绝缘的 simulati on n 仿真;模拟 prototyp e n 原型 array n 排队,编队 vector n 向量,矢量inverse adj 倒转的,反转的 n 反面;相反 v倒转 high-performance 高精确性,高性能 two-dimensional 二维的;缺乏深度的 three-dimensional 三维的;立体的;真实的。
Lesson 1Accuracy 精确性、精度Amplitude 振幅,幅度Channel 信道,频道Coefficient 系数Convergence 收敛Differentiate 求……的微分Expansion 展开式Harmonic 谐波的Instant 瞬时,时间Integrate 求……的积分Linear 线性的Order 次序,阶Peak 最高的,最高峰Periodicity 周期Phase 相位Polynomial 多项式的,多项式Resistor 电阻器Series 展成级数,级数Taylor series 泰勒级数Set 集合Sinusoidal 正弦的Time domain 时域frequency-domain 频域integrand 被积函数Lesson 2decay 衰减duration 持续时间exponential 指数的multiplier 乘数,乘法器oscillatory 振荡的frequency density function 频率密度函数Fourier series 傅立叶级数Spectrum 频谱Imaginary part of complex 复数的虚部Real part of complex 复数的实部Conjugate pairs 共轭对Lesson 3algorithm 算法decaying oscillatory function 衰减振荡函数power series 幂级数shift operator 移位算子product 乘积electrical disturbance 电干扰sampled-data signal 数据采样信号be proportional to 与…成正比Lesson 5dead-band 死区hysteresis 滞后linearity 线性度measurand 被测量oscilloscope 示波器performance 特性precision 精确度resolution 分辨率static friction 静态摩擦sensitivity 灵敏度calibration 校准loading effect 负载效应slop 斜率platinum 铂thermometer 温度计in cascade with 与…串联in parallel with 与…并联lever 杠杆displacement 位移indicated value示值true value 真值deflection 偏转possible error 可能误差probable error 概率误差root-sum-square error 方和根误差Lesson 6overshoot 过调量,超调量transient response 瞬态响应variable 变量ramp 斜坡resonance 共振step input 阶跃输入step response 阶跃响应transient 瞬态的first-order system 一阶系统static error 静态误差dynamic error 动态误差time constant 时间常数frequency response 频率响应damping ratio 阻尼比under-damp 欠阻尼over-damp 过阻尼mass-spring system 质量-弹簧系统steady-state 稳态rise time 上升时间settling time 建立时间(过渡过程时间)specification 性能指标tolerance 容差Lesson 7capacitance 电容deformation 变形distortion 变形,扭曲electromagnetic 电磁的gauge 表,仪器,计strain gauge 应变计crystalline material 晶体材料voltage 电压current 电流harmonics 谐波inductance 电感,感应infrared 红外的linearize 线性化natural frequency 固有频率mutual-inductance 互感photoconductive cell 光电导管photoelectric effect 光电效应piezo-electric 压电的potential divider 分压器potentiometer 电位计,电位器精品文库resistance 电阻thermistor 热敏电阻transducer 转换器,传感器cross-sectional area 截面积excitation voltage 激励电压full-scale 满量程rotary 旋转的translational 平移的mechanical wear 机械磨损inertia 惯性power dissipation 功耗illumination 照度transparent 透明的Lesson 8coupling 耦合flux 磁通impedance 阻抗permeability 磁导率permittivity 电容率,介电系数reluctance 磁阻variable-distance capacitive transducer 变间距式电容式传感器oscillation circuit 振荡电路l.v.d.t 线性差动变压器piezo-electric transducer 压电式传感器charge amplifier 电荷放大器parallel-plate capacitor 平板电容器variable-reluctance transducer 变磁阻传感器liquid level 液位Lesson 9apparatus 仪器attenuator 衰减器bandwidth 带宽battery 电池be inversely proportional to 与成反比be proportional to 与成正比capacitor 电容feedback 反馈gain 增益operational amplifier 运算放大器semiconductor 半导体terminal 终端test probe 探针voltmeter 电压表multirange 多量程variable resistor 可变电阻Lesson 10duty cycle 占空比timerbase 时基register 寄存器signal conditioning 信号调理threshold 阈值trigger 触发器Lesson 11adapter boarder 适配板analog-to-digital conversion模数转换desktop 工作平台distortion 失真dynamic 动态的expansion slot 扩展槽generator 发生器interface 接口local area network LAN 局域网motherboard 母板scale 刻度slot 长槽workbench 工作台computer-aided testing(CAT)计算机辅助测试desktop personal computer台式个人计算机knob 旋钮16-channel analog-to-digitalconversion board 16通道模/数转换板12-bit resolution 12位分辨率buffer 缓冲器interface 接口data-gathering device 数据采集装置Lesson 12active element 有源元件bias 偏差,偏置current intensity 电流electrode 电极field-effect transistor FET场效应管grid 格子,栅极integrated circuit 集成电路magnetic field 磁场passive component 无源元件photocell 光电管sensor 传感器,敏感元件thermocouple 热电偶transducer 变换器,换能器,传感器vacuum tube 真空管,电子管Lesson 13cache memory 高速缓冲存储器,高速缓存control unit 控制器,控制部件drain 场效应管的漏集dynamic RAM (DRAM)动态随机存取存储器gate 门(电路),管子的栅极local memory 局部存储器,本地存储器metal-oxide-semiconductorfield effect transistor(MOSFET)金属氧化物半导体场效应管microcontroller 微控制器microprocessor微处理器monitor 监视器mouse 鼠标精品文库printer打印机static RAM (SRAM)静态RAMultra-large-scale integratedcircuit 超大规模集成电路。