有限体积法及其网格简介.ppt
- 格式:ppt
- 大小:149.00 KB
- 文档页数:13
有限体积法介绍有限体积法1 有限体积法基本原理上⼀章讲到的有限差分法将数值⽹格的节点上定义为计算节点,并在⽹格节点上对微分形式的流体基本⽅程进⾏离散,⽤⽹格节点上的物理量的代数⽅程作为原PDE 的近似。
在本章所要学习的有限体积法则采⽤了不同的离散形式。
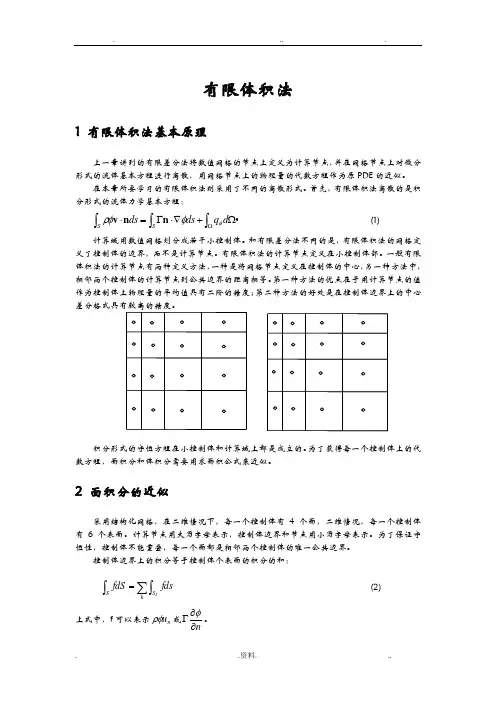
⾸先,有限体积法离散的是积分形式的流体⼒学基本⽅程:d q ds ds SSΩΩ+??Γ=?φφρφn n v(1)计算域⽤数值⽹格划分成若⼲⼩控制体。
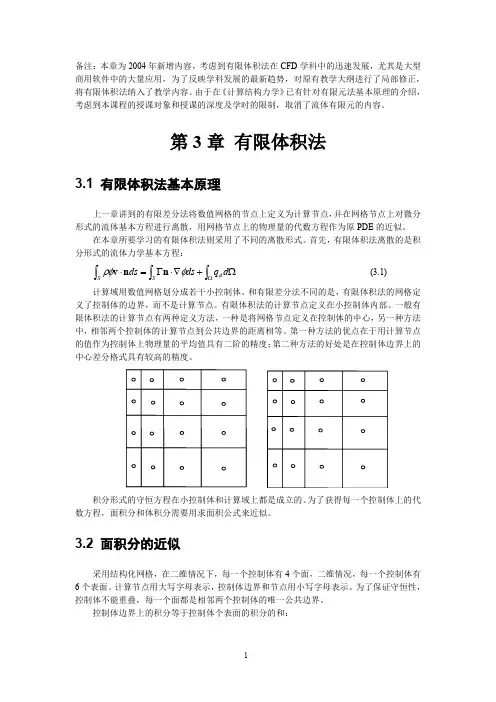
和有限差分法不同的是,有限体积法的⽹格定义了控制体的边界,⽽不是计算节点。
有限体积法的计算节点定义在⼩控制体内部。
⼀般有限体积法的计算节点有两种定义⽅法,⼀种是将⽹格节点定义在控制体的中⼼,另⼀种⽅法中,相邻两个控制体的计算节点到公共边界的距离相等。
第⼀种⽅法的优点在于⽤计算节点的值作为控制体上物理量的平均值具有⼆阶的精度;第⼆种⽅法的好处是在控制体边界上的中⼼差分格式具有较⾼的精度。
积分形式的守恒⽅程在⼩控制体和计算域上都是成⽴的。
为了获得每⼀个控制体上的代数⽅程,⾯积分和体积分需要⽤求⾯积公式来近似。
2 ⾯积分的近似采⽤结构化⽹格,在⼆维情况下,每⼀个控制体有4个⾯,⼆维情况,每⼀个控制体有6个表⾯。
计算节点⽤⼤写字母表⽰,控制体边界和节点⽤⼩写字母表⽰。
为了保证守恒性,控制体不能重叠,每⼀个⾯都是相邻两个控制体的唯⼀公共边界。
控制体边界上的积分等于控制体个表⾯的积分的和:∑??=kkfds fdS(2)上式中,f 可以表⽰n u ρφ或nΓφ。
显然,为了获得边界上的积分,必须知道f 在边界上的详细分布情况,这是不可能实现的,由于只是计算节点上的函数值,因此必须采⽤近似的⽅法来计算积分。
整个近似过程分成两步第⼀步:⽤边界上⼏个点的近似积分公式第⼆步:边界点上的函数值⽤计算节点函数值的插值函数近似⾯积分可采⽤以下不同精度的积分公式:⼆阶精度积分:e e e e S e Sf S f fds F e≈==?(3)上式中e f 为边界中点出的函数值。

有限体积法1 有限体积法基本原理上一章讲到的有限差分法将数值网格的节点上定义为计算节点,并在网格节点上对微分形式的流体基本方程进行离散,用网格节点上的物理量的代数方程作为原PDE 的近似。
在本章所要学习的有限体积法则采用了不同的离散形式。
首先,有限体积法离散的是积分形式的流体力学基本方程:•d q ds ds SS⎰⎰⎰ΩΩ+∇⋅Γ=⋅φφρφn n v(1)计算域用数值网格划分成若干小控制体。
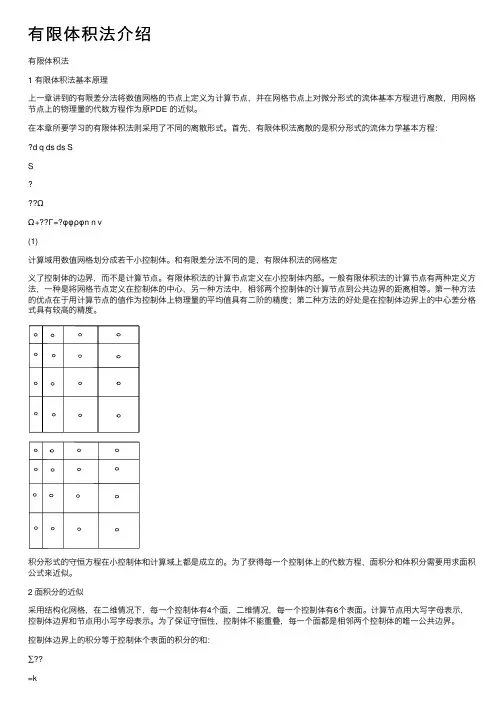
和有限差分法不同的是,有限体积法的网格定义了控制体的边界,而不是计算节点。
有限体积法的计算节点定义在小控制体内部。
一般有限体积法的计算节点有两种定义方法,一种是将网格节点定义在控制体的中心,另一种方法中,相邻两个控制体的计算节点到公共边界的距离相等。
第一种方法的优点在于用计算节点的值作为控制体上物理量的平均值具有二阶的精度;第二种方法的好处是在控制体边界上的中心差分格式具有较高的精度。
积分形式的守恒方程在小控制体和计算域上都是成立的。
为了获得每一个控制体上的代数方程,面积分和体积分需要用求面积公式来近似。
2 面积分的近似采用结构化网格,在二维情况下,每一个控制体有4个面,二维情况,每一个控制体有6个表面。
计算节点用大写字母表示,控制体边界和节点用小写字母表示。
为了保证守恒性,控制体不能重叠,每一个面都是相邻两个控制体的唯一公共边界。
控制体边界上的积分等于控制体个表面的积分的和:∑⎰⎰=kS Skfds fdS(2)上式中,f 可以表示n u ρφ或n∂∂Γφ。
显然,为了获得边界上的积分,必须知道f 在边界上的详细分布情况,这是不可能实现的,由于只是计算节点上的函数值,因此必须采用近似的方法来计算积分。
整个近似过程分成两步第一步:用边界上几个点的近似积分公式第二步:边界点上的函数值用计算节点函数值的插值函数近似 面积分可采用以下不同精度的积分公式: 二阶精度积分:e e e e S e Sf S f fds F e≈==⎰(3)上式中e f 为边界中点出的函数值。

有限体积方法引言有限体积法(FVM)是在物理空间上积分形式的守恒方程进行直接离散的数值方法。
与有限差分方法相比有限体积方法更具有一般性,适用于任意形式的网格,结构网格与非结构网格均适用。
有限体积法是一种基于将CFD中最基本的量在单元内的平均值,这是与有限差分及有限元方法区别的地方,后边两种方法的数值量都取为在网格点上。
FVM方法一个重要优势是跟守恒性离散这个重要的概念联系起来,它可以自动满足具有守恒性的离散。
另一个优点就是适用于任意的网格。
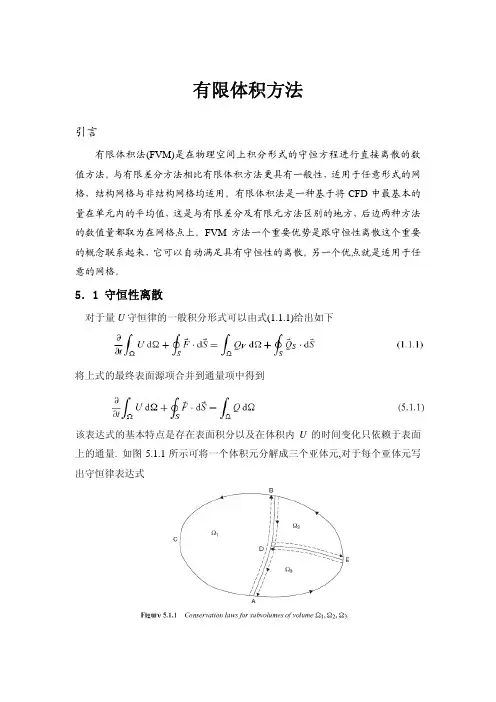
5.1 守恒性离散对于量U守恒律的一般积分形式可以由式(1.1.1)给出如下将上式的最终表面源项合并到通量项中得到该表达式的基本特点是存在表面积分以及在体积内U的时间变化只依赖于表面上的通量. 如图5.1.1所示可将一个体积元分解成三个亚体元,对于每个亚体元写出守恒律表达式将这些表面积分进行加和,内部线ADB以及DE总是两次出现,但是方向相反,将三部分积分守恒律相加,这些内部的贡献量就会抵消,只剩下外边界的贡献量.例如,对于有一个通量的贡献量而对于也有一个相似的项:这样这两项相加就可以抵消. 故要保证格式是守恒的,通量的数值离散必须满足这样一个基本性质.下面我们以一维守恒律的情形来说明这个问题结合图5.1.2来说明这个问题其中f是矢量通量的x方向分量, 参考上图, 定义一个一维有限体积网格,并把中间点定义为“单元面”. 例如, 对于元(i), 单元面就是i-1/2与i+1/2的中点.对该有限体积网格应用中心差分, 在i, i+1与i-1点处分别离散得到将以上三个方程加和就得到了与元AB(i-3/2, i+3/2)上的守恒律相容的离散方程,即从上式可以看出内部点的通量贡献已经抵消掉. 有时这种特性称为通量项的“telescoping property”, 对于元AB, 只考虑中间点i(不考虑i-1与i+1点),则离散形式可以直接写为从 5.1.7的两式对比中, 我们可以看到通量部分的离散具有统一的形式, 这就是我们所要强调的守恒的特性.如果我们要考虑方程(5.1.3)的非守恒形式, 则通量的导数就可以写为其中, a(u)为Jacobian函数, , 故非守恒形式可以写为利用图5.1.2所示的有限体积网格, 对非守恒形式在i点应用二阶中心差分得到其中是的值.同样,对于i+1点以及i-1点有,将9式中三个离散式子进行加和得到参考5.1.7b, 将5.1.8式直接在AB上进行离散,可得我们发现5.1.10a右边由元AB内部点贡献的通量部分并不能互相抵消掉, 表现出源项的特点,这导致计算机程序不能将之与物理源项相区分, 故非守恒形式的离散会产生内部源.这些项被认为在网格点处展开为一项的二阶形式. 在连续流情况下可以忽略它, 但是对于计算非连续流动,比如流动中有激波产生, 就会产生巨大的误差. 数值实验显示非守恒形式比守恒形式的精度更低,尤其是在遇到梯度大的地方,由于数值源项的存在会产生更大的误差.5.1.1 守恒的离散化的正式表示方法对于5.1.3式,如果离散成如下的形式就可以满足守恒性要求,为数值通量, 其为u在(2k)个邻域内点的函数.此外, 方程5.1.11与原方程相容性要求当所有的均相等时,有这些都可以直接推广到多维的情形, 以上条件必须分别对矢量通量的所有分量均成立.定理: 当趋近于0时,若离散方程5.1.11的解几乎处处收敛于某个函数值, 则是方程 5.1.3的弱解(可以存在有限个间断——Rankine-Hugoniot条件)5.2 有限体积方法基础有限体积方法是积分形式的守恒律方程的直接离散,这是有限体积方法与有限差分方法最大的区别,由于积分形式是守恒律的最一般的表达式,它不要求通量一定是连续的,这就是有限体积方法接近真实流动的原因.FVM需要按以下步骤来构建:1.划分网格,由空间离散得到有限体积,一个控制体积与每一个网格点都相关联2.在每一个有限体积上应用积分形式的守恒律.有限体积选择的条件由于具有普遍性,有限体积方法能够适用于任何类型的网格,结构与非结构.单元居中的方法: 未知量定义在网格单元的中心,网格线定义了有限体积及表面积, 此处, 变量与单元相关,如图5.2.1a及c. 流动变量是在整个单元的平均值, 可以认为是单元内部某些有代表性点的值, 例如单元中心点.单元顶点的方法: 未知量定义在网格角上,此处变量与网格点相关,例如单元顶点, 如图5.2.1b,d所示在相容的有限体积方法的体积的选择上,以下的限制条件必须得到满足:(i)它们的总数应该覆盖整个区域(ii)亚区域是允许重叠的,条件是表面的每一部分作为一个偶数个不同亚区域的部分而出现,这样整体的总积分守恒律就适用于任何相邻亚区域的组合域.(iii)通量沿单元表面必须由不依赖于当地单元的公式来计算.(iii)确保了守恒特性的满足,因为通量的内部边界的贡献量会抵消掉(相关的有限体积相加之后)5.2.2 有限体积离散的定义将积分型守恒律应用到每一个控制体积, 关联到网格点J, 因此对于依附于该点或单元上未知量的离散化方程可定义为:该方法的优点(对于无源项方程尤其有优势)是通量只在二维表面上计算,而不是三维空间中. 5.2.1可由其离散形式代替,对于参考图5.2.1a对于单元1(i, j), 用统一表示, 是ABCD面. 通量项在4条边AB, BC, CD, DA求和.式(5.2.2) 说明了有限体积法与有限差分及有限元法区别的一些重要特性: 1.点J的坐标是变量的准确位置,在控制体积内它将不会明确的标出.因此在控制体内联结到一个固定点,将之看作是整个控制元上该流动变量U的一个平均值(图5.2.1a). 5.2.2式中第一项代表在选定的控制体积上流动变量的平均值的时间变化率.2.网格坐标只出现在确定的单元体积以及侧面上. 因此, 参照图5.2.1a, 考察点1的控制元ABCD只有A,B,C,D的坐标将是需要用到的.3.当不存在源项的时候,有限体积方程式表示时间间隔内U的平均值变化等于相邻单元之间通量的交换量,对稳态流动,得到的数值解是通量进入控制体平衡的结果, 即例子: 图5.2.1a中AB面,对于1则通量贡献量为正,而8则为负.4. 有限体积也允许边界条件的自然引入, 例如固壁, 法向分量为0, 对连续方程. 在固壁处. 因此对(5.2.2)及(5.2.3)的相应的贡献变为0.5.2.3 数值格式的一般表达式假设守恒律的积分形式(5.2.1)对于控制体积, 从到进行积分有,引入单元平均守恒变量, 在时间的源, 单元与时间平均源, 以及每个边上的数值通量, 分别定义如下守恒的离散化采用如下形式:其中与任何网格点无关, 它是整个单元上的平均. 为了在离散化的水平上实现守恒,在给定的单元面上的数值通量的估计必须独立于其所属的单元.如果考虑空间离散完全由其数值通量来定义,时间积分项暂不处理,则以上的数值方法就会得到其一般形式. 一个一般的数值格式可以定义为对时间的常微分方程为定义残差为整个单元上的通量平衡减去源项贡献. 5.2.6是5.2.7的时间的向前差分,也有其他的时间离散方法,例如龙格-库塔法.守恒性条件可选择的公式在任意数量的单元上对5.1.2进行展开, J=1-N. 对所有的单元进行加和,削去所有单元内表面的贡献项得,定义为在整个单元的平均值,该格式的守恒性要求,在每一个时间步,如下的条件要得到满足,边界以及源项5.3 有限体积方法的实际应用5.3.1 二维有限体积方法如图5.2.1a,考察控制单元ABCD, 方程5.2.1可写为f, g为矢量通量F的直角坐标分量,对边AB,表面矢量可定义为对于单元,可以得到有限体积方程ABCD展开求和包括ABCD的四条边,对于一般的四边形,面积可由对角线矢量乘积表示,如图5.3.1, 平行四边形1234的面积是ABCD的两倍,因此, 为点A的位置矢量.对于单元ABCD,上式右边为正.通过单元表面通量的计算沿侧边通量分量,如的计算(a)对于中心离散格式以及单元中心化的有限体积方法,有以下做法:1.通量平均2.由于通量分量一般是U的线性函数,以下的式子与5.3.5不等价3.将取为通量在A及B处的平均这里,可以在A及B处求变量的值, 例如以及也可以进行通量的直接平均, 例如:可以看到, 5.3.7与5.3.10比5.3.8与5.3.11需要更少的通量计算(b)对于中心格式及单元-顶点的有限体积方法:5.3.7, 5.3.8是对通量的直接近似, 5.3.8是对应着对积分梯形公式的应用通过加和在单元ABCD四个边积分的贡献量(如图5.2.1b), 可以得到例子: 在笛卡儿网格下的中心离散格式. 在笛卡儿坐标, 均匀网格下,上述有限体积公式与有限差分的公式是一致的. 由可以得到(此处记, 同样其他的量也采用类似的记法)两边除以可以得到中心差分格式将5.3.5式应用到图5.2.1a, 方程E5.3.3变为而由5.3.8与5.3.11将推出如下的公式(c)单元-中心化有限体积的迎风格式(利用上游点求下游)对流通量以相关的对流速度传播方向的函数来计算,其中由图5.2.1a可以定义(d)对于迎风-单元顶点的有限体积方法(图5.2.1b), 可以定义例子:E5.3.2 “笛卡儿坐标网格中的迎风格式”考虑二维线性对流方程的离散如图5.2.1a所示, 在单元ABCD应用有限体积的公式:通量定义为, 选择方程5.3.14, AB,CD为竖直边,有对于水平边BC, DA有故其得到的格式为一阶迎风格式的推广, 具有一阶精度5.3.2 梯度的有限体积的计算对于任意一个体积,由高斯定理得此处,S是封闭的边界表面,定义平均化的梯度为以及对于二维控制单元,可以得到如图5.2.1d, 在公式两边应用梯形积分公式, 得到此处对所有的顶点求和,从1到6, 以及. 经过整理可得到对于y同样存在这样的关系计算单元面积: 当U=x时,方程5.3.21左侧为1. 对于任意一个单元的面积可用如下的式子进行计算,对任意一个四边形ABCD, 如图5.3.2, 可以得到以及对于y方向导数有,对于同一单元的封闭面与体有如下关系对于二维单元, 取, 可以推出如下的公式例子: E5.3.3 二维扩散方程考虑二维扩散方程对于扩散的通量分量(k为常数) 在图5.2.1a的网格上进行有限体积的离散,将整个单元ABCD的通量表示如下,在单元的格点A,B上计算导数, 对于单元(i, j),方程5.3.3可写为对于A点, U的导数取整个元1,6,7,8的平均值,由5.3.26得对于B可以得到与A类似的关系通过边AB对通量的贡献为E5.3.14与E5.3.15两式的加和, 并与相乘而得到的,同理通过BC通量的贡献为类似的关系对于C有最后,对于方程E5.3.13有, 可以写为该数值离散对应的是图4.2.3中Laplace算子的离散.更简单的办法为这样就推出了扩散方程的标准有限差分格式(对应图4.2.2)以上可以推广到多维的情况以及流行的结构及非结构网格上去.。
有限体积法1 有限体积法基本原理上一章讲到的有限差分法将数值网格的节点上定义为计算节点,并在网格节点上对微分形式的流体基本方程进行离散,用网格节点上的物理量的代数方程作为原PDE 的近似。
在本章所要学习的有限体积法则采用了不同的离散形式。
首先,有限体积法离散的是积分形式的流体力学基本方程:•d q ds ds SS⎰⎰⎰ΩΩ+∇⋅Γ=⋅φφρφn n v(1)计算域用数值网格划分成若干小控制体。
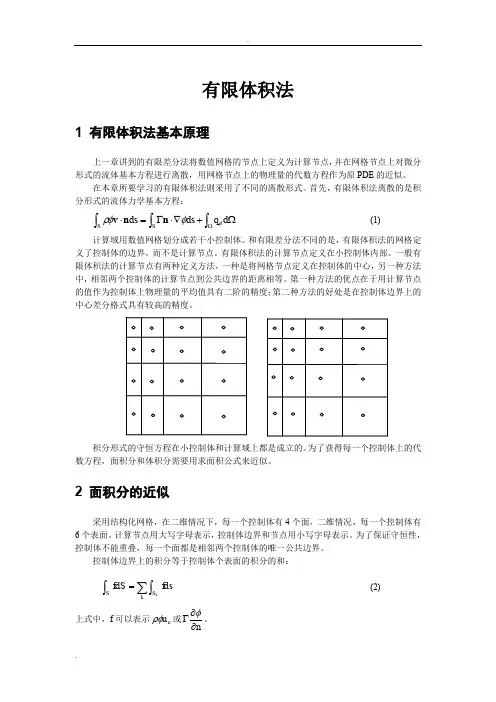
和有限差分法不同的是,有限体积法的网格定义了控制体的边界,而不是计算节点。
有限体积法的计算节点定义在小控制体部。
一般有限体积法的计算节点有两种定义方法,一种是将网格节点定义在控制体的中心,另一种方法中,相邻两个控制体的计算节点到公共边界的距离相等。
第一种方法的优点在于用计算节点的值作为控制体上物理量的平均值具有二阶的精度;第二种方法的好处是在控制体边界上的中心差分格式具有较高的精度。
积分形式的守恒方程在小控制体和计算域上都是成立的。
为了获得每一个控制体上的代数方程,面积分和体积分需要用求面积公式来近似。
2 面积分的近似采用结构化网格,在二维情况下,每一个控制体有4个面,二维情况,每一个控制体有6个表面。
计算节点用大写字母表示,控制体边界和节点用小写字母表示。
为了保证守恒性,控制体不能重叠,每一个面都是相邻两个控制体的唯一公共边界。
控制体边界上的积分等于控制体个表面的积分的和:∑⎰⎰=kS Skfds fdS(2)上式中,f 可以表示n u ρφ或n∂∂Γφ。
显然,为了获得边界上的积分,必须知道f 在边界上的详细分布情况,这是不可能实现的,由于只是计算节点上的函数值,因此必须采用近似的方法来计算积分。
整个近似过程分成两步第一步:用边界上几个点的近似积分公式第二步:边界点上的函数值用计算节点函数值的插值函数近似 面积分可采用以下不同精度的积分公式: 二阶精度积分:e e e e S e Sf S f fds F e≈==⎰(3)上式中e f 为边界中点出的函数值。

第三讲 空间离散方法—有限体积法由于控制方程的复杂性,很难求出其解析解,一般采用数值方法对其进行求解。
采用数值求解方法,首先要对流场空间进行离散,即用一些基本体积单元对物理空间进行填充,要求这些体积单元既不能重叠,也不应有间隙,我们称这些体积单元为网格,或控制体积,填充的过程则称为网格生成。
对于二维流动,基本的网格单元有三角形和四边形网格,而对于三维流动,则基本的网格单元可由四面体、三棱柱、金字塔和六面体单元组成,图3.1即为机翼附近网格。
网格划分完成后,就可以应用相应的数值求解方法把每个网格单元中心点处的流动变量求解出来,也就完成了全部流场的计算。
有限体积法就是针对每个控制体积直接对积分形式的控制方程进行离散,从而把积分型方程近似为代数方程进行求解的方法。
图3.1 机翼附近网格3.1 N-S 方程的半离散形式积分形式的N-S 方程为: ∫∫Ω∂Ω=⋅−+Ω∂∂0)(dS n F F Qd t V c r (3-1) 针对空间某一控制体I Ω,首先对时间导数项进行处理,假设守恒变量Q 在控制体积内为常数分布,即等于控制体中心点处的值I Q (也即为控制体积内守恒变量的平均值),有∫Ω∂∂Ω=Ω∂∂t Q Qd t I (3-2) 式(3-1)变为 ∫Ω∂⋅−Ω−=∂∂dS n F F t Q v c I r )(1 (3-3)假设对流通量和粘性通量在控制体界面上为常值分布,且等于界面中心点(面心)处的值,则有 ⎥⎦⎤⎢⎣⎡Δ⋅−Ω−=∂∂∑=F N m m m v c I S F F t Q 1)(1 (3-4) 对式(3-3)右端项的近似称为空间离散,而式(3-4)时间方向暂时保留连续的形式,所以称该式为半离散控制方程。
式(3-4)中的m S Δ为第m 个界面的有向面积,即该面的外法线矢量与界面面积的乘积,为一矢量,又称面积矢量。
仔细观察半离散方程可以发现:时间导数项是由单元中心点处的守恒变量值表示的,我们称其为单元中心法;式(3-4)右端项中的通量是关于界面处流动变量的函数,需由界面处的流动变量来确定,由此可看出,流动变量I Q 与流动通量m S F Δ⋅的空间存储位置不同,要想求出流动通量,需先假设流动变量在控制体积内的分布规律,这一过程称为重构,然后确定界面处的流动变量值,再求出界面处的流动通量。