【测绘课件】空间后方交会.ppt
- 格式:ppt
- 大小:247.50 KB
- 文档页数:75




单像空间后方交会测绘学院 成晓倩1 概述1.1 定义利用一定数量的地面控制点和对应像点坐标求解单张像片外方位元素的方法称为空间后方交会。
1.2 所需控制点个数与分布共线条件方程的一般形式为:⎪⎪⎩⎪⎪⎨⎧-+-+--+-+--=--+-+--+-+--=-)()()()()()()()()()()()(33322203331110S S S S S S S S S S S S Z Z c Y Y b X X a Z Z c Y Y b X X a f y y Z Z c Y Y b X X a Z Z c Y Y b X X a f x x (1)式中包含有六个外方位元素,即κωϕ、、、、、S S S Z Y X ,只有确定了这六个外方位元素的值,才能利用共线条件方程真正确定一张像片的任一像点与对应地面点的坐标关系。
个数:对任一控制点,我们已知其地面坐标)(i i i Z Y X 、、和对应像点坐标)(i i y x 、,代入共线条件方程可以列出两个方程式,因此,只少需要3个控制点才能解算出六个外方位元素。
在实际应用中,为了避免粗差,应有多余检查点,因此,一般需要4~6个控制点。
分布:为了最有效地控制整张像片,控制点应均匀分布于像片边缘,如下图所示。
由于共线条件方程是非线性的,直接答解十分困难,所以首先将共线方程改化为线性形式,然后再答解最为简单的线性方程组。
2 空间后方交会的基本思路分布合理 分布合理 分布不合理2.1 共线条件方程线性化的基本思路在共线条件方程中,令)()()()()()()()()(333222111S S S S S S S S S Z Z c Y Y b X X a Z Z Z c Y Y b X X a Y Z Z c Y Y b X X a X -+-+-=-+-+-=-+-+-= (2) 则共线方程变为⎪⎪⎩⎪⎪⎨⎧-=--=-ZY fy y Z Xf x x 00 (3) 对上式两侧同乘Z ,并移至方程同侧,则有⎩⎨⎧=-+=-+0)(0)(00Z y y Y f Z x x X f (4) 令⎩⎨⎧-+=-+=Zy y Y f Fy Zx x X f Fx )()(00 (5) 由于上式是共线方程的变形,因此,Fy Fx 、是κωϕ、、、、、S S S Z Y X 的函数。





空间后方交会名词解释
空间后方交会,是指利用航摄像片上三个以上不在一条直线上的控制点按共线方程计算该像片外方位元素的方法。
是单幅影像解析过程中的一个步骤。
如果我们知道每幅影像的6个外方位元素,就能确定被摄物体与航摄影像的关系。
因此,如何获取影像的外方位元素,一直是摄影测量工作者所探讨的问题。
可采取的方法有:利用雷达、全球定位系统(GPS)、惯性导航系统(INS)以及星相摄影机来获取影像的外方位元素;也可利用影像覆盖范围内一定数量的控制点的空间坐标与影像坐标,根据共线条件方程反求该影像的外方位元素,这种方法称为单幅影像的空间后方交会。
后方交会
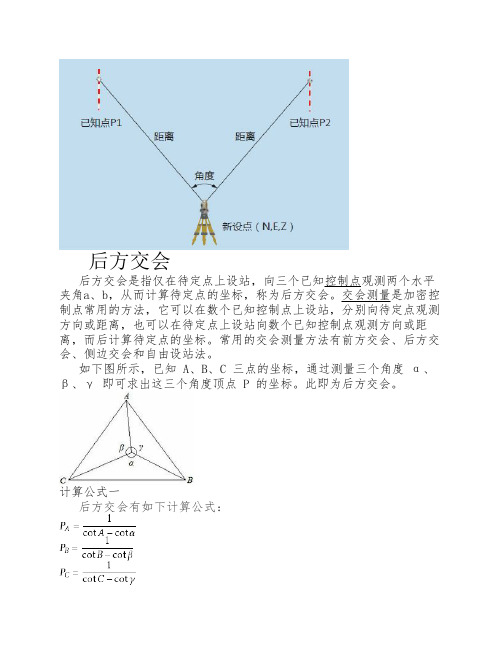
后方交会是指仅在待定点上设站,向三个已知控制点观测两个水平夹角a、b,从而计算待定点的坐标,称为后方交会。
交会测量是加密控制点常用的方法,它可以在数个已知控制点上设站,分别向待定点观测方向或距离,也可以在待定点上设站向数个已知控制点观测方向或距离,而后计算待定点的坐标。
常用的交会测量方法有前方交会、后方交会、侧边交会和自由设站法。
如下图所示,已知 A、B、C 三点的坐标,通过测量三个角度 α、β、γ 即可求出这三个角度顶点 P 的坐标。
此即为后方交会。
计算公式一
后方交会有如下计算公式:
实际测量时一般是使用全站仪测量三个方向角 PA、PB、PC。
根据这三个方向角计算如下六个变量,然后再代入上面的公式计算点P的坐标。
计算公式二
全站仪测量三个方向角 PA、PB、PC。
根据这三个方向角计算点P坐标的公式如下:
危险圆
点 P 在三角形 ABC 的外接圆上时,α、β、γ 将保持不变。
如此一来,点 P 的坐标将有无穷个——外接圆上的任意一点均可以是点P。
此时,使用计算公式计算点 P 坐标时,可能会因为除以零而得到无效解。
点 P 靠近外接圆时,很小的观测误差都会引起点 P 位置的较大偏差。
因此,称三角形 ABC 的外接圆为危险圆。
后方交会时,应避免点P 离危险圆很近。
精度假定水平方位角的观测中误差为
,则有:
点P的定位精度为:
定向精度为:
上面两个公式中的
按下面的公式计算
注意:当点P在危险圆上时
将等于零,于是定位精度与定向精度将为无穷大。