用状态机设计的交通灯控制器
- 格式:wps
- 大小:18.50 KB
- 文档页数:4
基于AT89C51单片机的交通灯系统设计摘要:本文设计了一种基于AT89C51单片机的交通灯系统。
该系统通过使用AT89C51单片机作为控制核心,结合LED灯、红外传感器等硬件部件,实现了智能交通灯的功能。
利用AT89C51单片机的高性能和可编程性,本文提出了基于状态机的控制算法,实现交通灯的精确控制,以提高交通效率和安全性。
试验结果表明,所设计的交通灯系统稳定可靠,具有一定的应用价值。
关键词:AT89C51、单片机、交通灯、智能控制、状态机1. 引言交通灯作为城市道路交通的重要组成部分,对交通的顺畅和安全起着至关重要的作用。
传统的交通灯系统通常接受定时控制方式,无法依据实际交通状况进行灵活调整,导致交通拥堵和交通事故频发。
因此,设计一种智能交通灯系统,能够依据实时交通状况智能调整交通信号灯的状态,具有重要的现实意义。
2. 系统设计2.1 系统硬件设计本文所设计的交通灯系统接受AT89C51单片机作为控制核心,具有较高的性能和可编程性。
系统硬件部件包括LED灯、红外传感器、电路板等。
其中,LED灯用于表示交通灯的红、黄、绿三种状态;红外传感器用于感知车辆的存在与否。
这些硬件部件通过电路板毗连并与AT89C51单片机进行相应的电路毗连,构成完整的交通灯系统。
2.2 系统软件设计系统软件主要包括控制算法的设计和程序编写。
本文接受了基于状态机的算法,实现交通灯的智能控制。
系统依据红外传感器感知到的车辆状况和交通灯当前的状态来进行裁定,从而确定下一时刻交通灯的状态。
详尽实现过程如下:状态1:红灯状态。
当红灯亮起时,表示该方向的车辆需要停车等待。
系统检测到车辆通过红外传感器时,切换到状态2。
状态2:绿灯状态。
当绿灯亮起时,表示该方向的车辆可以通行。
系统计时一定时间后,切换到状态3。
状态3:黄灯状态。
当黄灯亮起时,表示该方向的车辆应注意停车。
系统计时一定时间后,切换到状态1。
该算法能够依据交通灯的当前状态和车辆的状况进行相应的状态切换,实现智能交通灯的控制。
交通灯的PLC程序设计摘要PLC(可编程逻辑控制器)是一种用于自动化控制的计算机设备。
本文将介绍在交通灯系统中使用PLC进行控制的程序设计。
介绍随着城市化的发展,交通拥堵已经成为了一个普遍的现象。
为了解决交通拥堵问题,并提高道路交通的安全性,交通灯系统变得越来越重要。
在交通灯系统中,使用PLC控制可以实现精确、可靠、高效的控制方式。
PLC是一种专业的控制器,主要用于工业自动化控制。
PLC能够将输入的控制信号进行逻辑处理,并输出相应的控制信号,实现可编程的自动控制。
在交通灯系统中,PLC负责控制信号灯的开关,保证交通信号灯的正常运转。
本文将介绍在交通灯系统中使用PLC的程序设计。
该设计针对的是普通十字路口,控制红、黄、绿三种信号灯的开关顺序,以保证交通流畅和交通安全。
PLC程序设计逻辑控制在交通灯系统中,PLC将接受来自传感器的信号,根据这些信号进行逻辑运算,从而控制信号灯的开关。
通过逻辑运算,PLC可以实现绿灯亮、黄灯亮、红灯亮等不同的控制方式。
PLC的逻辑运算主要包括开关量逻辑和模拟量逻辑两种方式。
对于交通灯系统来说,开关量逻辑是最常用的控制方式,这是因为信号灯的开关只有两种状态:开和关。
控制程序交通灯系统中使用的PLC程序通常是基于状态机的控制方式。
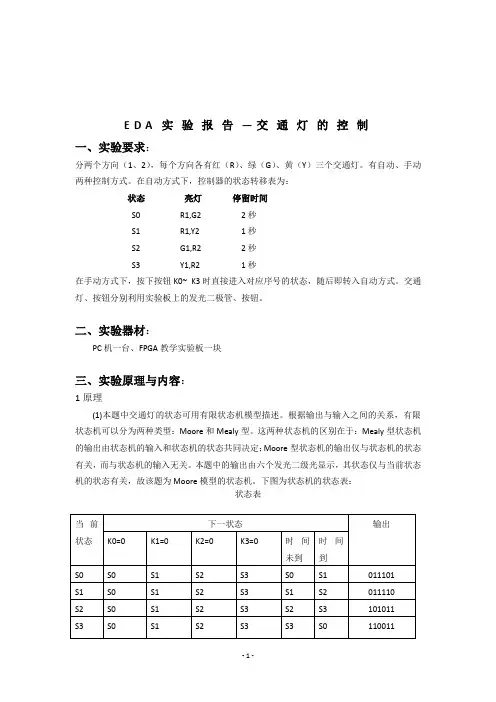
状态机是一种基于状态转移的控制模型,是一种理论模型,用于描述有限个状态及其之间的转移。
交通灯系统中的PLC程序一般会分为两部分:状态转移表和状态转移图。
状态转移表用于记录系统中所有的状态和它们之间的转移关系,状态转移图则是在状态转移表的基础上对状态之间的关系进行图形化表示。
下面是一个简单的状态转移表,用于描述交通灯系统中红、黄、绿三种灯的控制状态:当前状态输入信号下一状态红灯等待绿灯黄灯等待红灯绿灯等待黄灯红灯或黄灯非等待黄灯绿灯非等待红灯PLC程序实现在实现PLC程序时,需要根据状态转移图和状态转移表编写程序。
在交通灯系统中,PLC的输入端接收传感器信号,根据传感器信号和状态转移表的状态转移关系来更新PLC的输出信号。

DSP实验设计报告交通灯设计目的本实验旨在根据交通灯控制的实际情况,通过DSP进行流程设计,实现交通灯的各种状态的控制,以此提高实验者的DSP编程能力,增加其对控制系统的理解。
设计原理本实验的主要控制器是TMS320C6748 DSP芯片,通过硬件与LED灯连接,实现交通灯的开关控制。
同时为了保证控制系统可靠稳定,使用了光电隔离模块,充分隔离DSP和LED灯的电路。
本设计的交通灯状态转换流程采用了状态机设计思想,为灯控中的状态设计了相应的状态表,每种灯的状态都在状态表里有清晰的描述。
设计方案交通灯设有3种状态:绿灯进车、黄灯过渡、红灯停车,每一种状态都有对应的时间段,为保证交通的顺畅性,在每一个灯的状态下,都会伴随一个闪烁的灯,以提醒司机进行注意。
以此设计的状态图如下图所示。
在进入程序正式实现之前,本设计还首先对TMS320C6748芯片进行了硬件初始化。
然后,通过while(1)循环语句,对交通灯的各个状态进行了详细的代码实现。
在绿灯进车状态下,程序会调用绿灯程序来实现灯的亮灭控制,同时启动两个计时器,一个是绿灯定时器,另一个是闪烁灯定时器,用于定时绿灯亮起的时间和检测闪烁灯是否需要亮起。
设计结果本设计成功实现了交通灯的几种不同状态的控制,在调试过程中,程序运行稳定,性能良好,每种状态的时间也能够精确控制。
同时闪烁灯的提醒功能也能够很好的保证交通的顺畅性。
当交通灯进入红灯时,即停车状态,道路上的车辆就需要停车等待,因此为了达到更好的交通效果,可将道路的长度设置得适当加长,同时还需要设置好交通灯的时间参数,适时地调节程序中各种灯亮起的时间,使得交通灯控制系统的效率和安全性能得到了很大地提升。
不过需要注意的是,在程序运行过程中,还需要注重一些细节问题的处理,如各种定时器的时间调整、闪烁灯的速度设置等。
只有这样才能够保证一套良好的交通灯控制系统的建立。

基于FPGA的交通灯控制电路设计本文介绍了一种基于FPGA的交通灯控制电路设计。
交通灯控制是城市交通管理的一个重要部分,它有助于维护交通秩序,减少交通事故,提高交通效率。
在本电路设计中,我们使用FPGA作为主控制器,并通过数码管、按钮和LED模块与外部交互。
同时,我们还采用了状态机设计方法,以实现灵活的控制逻辑和连续的动态过渡。
首先介绍了本电路设计的硬件设计。
在本设计中,我们使用了FPGA作为主控制器,数码管用于显示当前状态,按钮用于进行手动控制,LED模块用于显示当前灯颜色。
在硬件设计中,我们通过适当的寄存器和时钟模块,实现了稳定的时序控制和同步操作。
接着,我们介绍了本电路设计的软件设计。
在软件设计中,我们采用了状态机设计方法,将交通控制逻辑分为多个状态,通过状态间的转移完成交通灯的切换控制。
具体地,我们将交通灯控制状态划分为三种:绿灯、黄灯和红灯。
在每种状态下,我们通过计数器和状态转移条件来实现精确的时间控制和灯颜色的自动切换。
同时,为了提高控制的灵活性,我们设计了手动控制模式,让用户可以通过按钮手动切换交通灯状态。
最后,我们介绍了本电路设计的实现结果。
在实现过程中,我们使用了Quartus II软件进行综合、布局和验证,并将设计的电路下载到FPGA开发板上进行实验。
实验结果表明,本交通灯控制电路设计实现了稳定、灵活和精确的交通控制,能够满足不同的交通道路需求。
综上所述,本文介绍了一种基于FPGA的交通灯控制电路设计,通过硬件和软件设计,实现了稳定、灵活和精确的交通控制。
该设计可以为城市交通管理提供帮助,为交通事故和交通拥堵的缓解做出贡献。
EDA课程设计报告设计题目:交通灯信号控制器专业年级:姓名:学号:指导教师:2012.5.30摘要-----------------------------------------------------1 关键词--------------------------------------------------1 一交通灯控制系统简介------------------------------------2 1.1 交通灯的发展----------------------------------------2 1.2 交通灯控制系统的目的--------------------------------2 二交通灯控制系统的设计----------------------------------2 2.1 设计要求--------------------------------------------3 2.2 设计思路--------------------------------------------3 2.2.1 设计流程----------------------------------------4 2.2.2 状态机变化图------------------------------------5 三详细设计----------------------------------------------6 3.1 红黄绿灯控制模块------------------------------------6 3.2 倒计时传输、控制模块---------------------------------6 3.3 倒计时45秒模块-------------------------------------7 3.4倒计时25秒模块--------------------------------------8 3.5倒计时5秒模块---------------------------------------8 3.6 总体连线图------------------------------------------9 四心得体会---------------------------------------------10 参考文献-----------------------------------------------10 附录---------------------------------------------------11随着电子设计技术、ISP(在系统可编程)技术,PLD(可编程逻辑器件),与EDA(电子设计自动化)紧密结合,它代表了数字系统设计领域的最高水平,给数字电路的设计带来了革命性的变化。
基于VHDL的交通灯控制器的设计一、设计目的1、掌握计数器、分频器、译码器的工作原理和设计方法;2、掌握数码管的动态扫描译码显示的工作原理和设计方法;3、掌握交通灯控制器的设计方法;4、掌握在EDA开发软件QuartusII环境下基于FPGA/CPLD的数字系统设计方法,掌握该环境下系统的功能仿真、时序仿真、管脚锁定和芯片下载的方法。
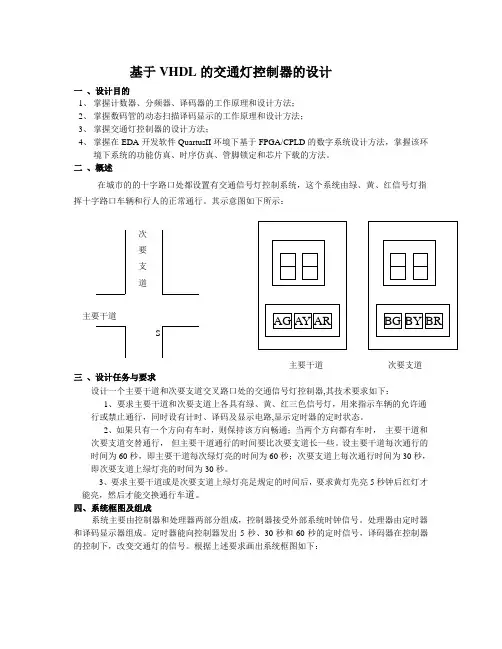
二、概述在城市的的十字路口处都设置有交通信号灯控制系统,这个系统由绿、黄、红信号灯指挥十字路口车辆和行人的正常通行。
其示意图如下所示:要支道主要干道S主要干道次要支道三、设计任务与要求设计一个主要干道和次要支道交叉路口处的交通信号灯控制器,其技术要求如下:1、要求主要干道和次要支道上各具有绿、黄、红三色信号灯,用来指示车辆的允许通行或禁止通行,同时设有计时、译码及显示电路,显示定时器的定时状态。
2、如果只有一个方向有车时,则保持该方向畅通;当两个方向都有车时,主要干道和次要支道交替通行,但主要干道通行的时间要比次要支道长一些。
设主要干道每次通行的时间为60秒,即主要干道每次绿灯亮的时间为60秒;次要支道上每次通行时间为30秒,即次要支道上绿灯亮的时间为30秒。
3、要求主要干道或是次要支道上绿灯亮足规定的时间后,要求黄灯先亮5秒钟后红灯才能亮,然后才能交换通行车道。
四、系统框图及组成系统主要由控制器和处理器两部分组成,控制器接受外部系统时钟信号。
处理器由定时器和译码显示器组成。
定时器能向控制器发出5秒、30秒和60秒的定时信号,译码器在控制器的控制下,改变交通灯的信号。
根据上述要求画出系统框图如下:图中:R:主要干道传感器来的信号,高电平表示有车,低电平表示设车。
S:次要支道传感器来的信号,高电平表示有车,低电平表示设车。
T L:主要干道绿灯亮的时间间隔为60秒,即主要干道车辆通行的时间为60秒,定时时间到时,T L=1,否则,T L=0。
T S:次要支道绿灯亮的时间间隔为30秒,即次要支道车辆通行的时间为30秒,定时时间到时,Ts=1,否则,T S=0。
“交通灯控制与显示电路”综合设计实验(4)——采用CPLD/FPGA可编程器件设计一、实验目的1.了解可编程逻辑器件设计的流程;2.掌握数码管动态扫描显示的实现方法;3.掌握状态机的设计方法;4.掌握进程的设计方法。
二、设计任务与要求1.实现正常时序控制功能;2.实现特殊状态控制功能;3.实现信号灯点亮时间预置功能;4.将东西方向、南北方向的灯亮时间分别用数码管显示;5.在MAX PLUS或Quartus II开发平台上,采用VHDL或Verilog编程设计;6.对编写的程序进行编译仿真、修改,使仿真结果达到设计要求;7.下载并测试电路的逻辑功能。
三、程序设计思路1.状态转换的实现在进程中利用自定义数据类型定义交通灯的4个状态,根据东西、南北方向的时间计数器的计数结果利用CASE语句实现4个状态的转换,在每一个状态中利用内部信号传递实现对红黄绿灯的显示控制。
2.时间显示的实现东西、南北两个方向共用8个数码管显示时间,为节省逻辑器件的I/O,时间显示采用动态扫描的方法。
动态扫描的基本原理是对于一组数码管动态扫描显示需要由两组信号来控制:一组是字段输出口输出的字形代码,用来控制显示的字形,称为段码;另一组是位输出口输出的控制信号,用来选择第几位数码管工作,称为位码。
各位数码管的段线并联,段码的输出对各位数码管来说都是相同的。
因此,在同一时刻如果各位数码管的位选线都处于选通状态的话,8位数码管将显示相同的字符。
若要各位数码管能够显示出与本位相应的字符,就只让这一位的位选线处于导通状态,而其它各位的位选线处于关闭状态。
同时,段线上输出相应位要显示字符的字型码。
这样在同一时刻,只有选通的那一位显示出字符,而其它各位则是熄灭的,如此循环下去,就可以使各位数码管显示出将要显示的字符。
动态扫描实现的基本思路是利用硬件语言编写一个8进制的计数器,根据计数器的值译出位选通信号来选择哪一个数码管显示;段线上显示的时间用一组减计数器实现,通过7段译码程序将计数器的时间信息按照相应的位信息送到段线上。
交通灯控制器数字电路的设计及仿真随着城市化进程的加快,交通量越来越大,如何科学有效地管理交通成为一个重要的问题。
其中,交通灯控制器是一个涉及电子电路技术的重要设备。
基于数字电路的设计和仿真,进一步提高交通灯控制器的精度和稳定性,对于保障交通安全、提高城市交通效率至关重要。
一、设计方案1.计算时序交通灯控制器的每个阶段均有确定的时间,因此需要计算时序以确定各个信号时序是否正确,以及控制灯的开关时间是否正确。
2.设计状态机根据计算好的时序,可以通过 ISE 设计工具绘制状态图,然后再利用 Verilog HDL 语言编写出状态机。
交通灯控制器的每个阶段都有一个对应的状态,状态机会根据输入信号的状态来判断当前处于何种状态,并根据状态判断应该输出什么信号。
3.确定数字电路结构利用 ISE 设计工具,可以采用 Combinational Logic Circuit 来设计灯的开关逻辑电路,时序电路中以时钟触发器为主。
可以通过该工具绘制仿真波形来检测电路的正确性,检查信号间是否存在错误。
二、仿真过程1.绘制输入信号波形首先,需要绘制出输入信号的波形,并且在仿真时要按照相应的频率和占空比输出。
2.对仿真波形进行仿真分析仿真过程中,可以通过 Xilinx 仿真工具,对仿真波形进行分析,检测电路的正确性和稳定性。
同时,可以通过仿真过程中的输出信号波形,判断各阶段信号的状态。
3.检验仿真结果与设计方案借助仿真工具,可以非常直观地验证数字电路的设计方案是否合理、可靠。
此外,还可以通过不同的应用场景,不断优化和调整设计方案,以实现更高的效率与精度。
三、总结数字电路的设计和仿真,可以有效地提高交通灯控制器的精度和稳定性,在城市交通管理中起到关键的作用。
当前数字电路技术的不断推进,为实现更加高效安全的交通管理提供了强有力的支持。
实验七交通灯控制器实验1.实验目的学习交通灯控制器的设计,学习简单状态机的设计和硬件测试。
2.实验内容本实验的内容是设计一个简易的交通灯控制器,要求能实现红黄绿三种灯的控制并通过数码管显示倒计时时间。
整个设计在MagicSOPC实验箱上实现。
3.实验原理本实验设计的交通灯控制器要求实现对A、B两个方向的红、绿、黄三种灯的控制,并能实现时间显示的倒计时。
因此每个方向的灯可用一个状态机实现,状态的跳转顺序为红灯—绿灯—黄灯—红灯(另一个的状态应为绿—黄—红—绿),同时设计一个计时器,来记录每种灯的倒计时时间。
最后将交通灯的状态信息输出,至数码管显示模块和交通灯模块。
注意一个方向的红灯时间应和另一个方向的绿黄灯时间总和相等。
4.实验步骤1)启动QuartusⅡ建立一个空白工程,然后命名为traffic_top.qpf。
2)新建Verilog HDL源程序文件traffic.v、traffic_test.v、traffic_top.v,输入程序代码并保存(完整的Verilog HDL程序参考程序清单交通灯程序),对各个HDL进行综合编译,若在编译过程中发现错误,则找出并改正错误,直至编译成功为止。
3)选择目标器件并对相应的引脚进行锁定,在这里所选择的器件为Altera公司CycloneII 系列的EP2C35F672C8芯片,引脚锁定方法如表1所列。
将未使用的引脚设置为三态输入(一定要设置,否则可能会损坏芯片)。
表1 引脚锁定方法4)设置traffic_top.v为顶层文件。
对该工程文件进行全程编译处理,若在编译过程中发现错误,则找出并改正错误,直至编译成功为止。
5)把程序下载到FPGA器件中。
按一下复位键SYS_RST,然后观察交通灯及数码管的显示状态。
5.实验参考程序程序清单交通灯程序1)交通灯控制器,文件名traffic.v本模块实现交通灯控制器的逻辑功能。
moduletraffic(clock,rst_n,clken,lampa,lampb,aco unt,bcount);input clock; //系统时钟50MHzinput rst_n; //同步复位信号,低电平有效input clken; //时钟使能信号:1Hz。
实验十二 二字路口交通灯控制器设计姓名:沈燮勇 学号:01486433 班级:01计(2)一、 实验目的学习利用计数器和状态机设计十字路口交通灯控制器。
二、 实验原理题目要求:设计一个简单十字路口交通灯控制器。
该控制器控制甲乙两道的红、黄、绿三色灯,指挥交通和行人安全通行,交通灯控制器的示意图,本闪实验只要求做出倒计时时间显示模块的VHDL 程序,黄灯闪烁。
复杂十字路口交通灯控制器要比简单交通灯控制器增加一些功能,如倒计时时间显示,左转弯(左拐)、指示灯闪烁及特殊紧急情况的处理等。
下面以下面的十字路口交通灯系统为例,来说明上述功能的实现:东西方向(甲道)循环为绿灯45s, 黄灯5s ,左拐灯15s ,黄灯5s ,红灯40s ,黄灯5s 南北方向(乙道)循环为红灯65s ,黄灯5s ,绿灯20s ,黄灯5s ,左拐灯15s ,黄灯5s 其一个工作周期的时间关系示意图如下:可以将一个周期划分成以下8种状态:S0:cnt=0-44:甲道通行,乙道禁止;S1:cnt=45-49:甲道停车,乙道禁止;S2:cnt=50-64;甲道左拐,乙道禁止;S3:cnt=65-69;甲道停车,乙道禁止;S4:cnt=70-89;甲道禁止,乙道通行;S5:cnt=90-94;甲道禁止,乙道停车;S6:cnt=95-109;甲道禁止,乙道左拐;S7:cnt=110-114;甲道禁止,乙道停车;一、倒计时时间显示模块的处理1、各路口倒计时时间的计算在各个阶段,各路口倒计时时间显示值与当前计数值存在一定的关系:S0:cnt=0-44:甲道时间显示:disp1=45-cnt ;乙道时间显示:disp2=65-cnt ; S1:cnt=45-49:甲道时间显示:disp1=50-cnt ;乙道时间显示:disp2=65-cnt ; S2:cnt=50-64;甲道时间显示:disp1=65-cnt ;乙道时间显示:disp2=65-cnt ; S3:cnt=65-69;甲道时间显示:disp1=70-cnt ;乙道时间显示:disp2=70-cnt ;S4:cnt=70-89;甲道时间显示:disp1=110-cnt;乙道时间显示:disp2=90-cnt;S5:cnt=90-94;甲道时间显示:disp1=110-cnt;乙道时间显示:disp2=95-cnt;S6:cnt=95-109;甲道时间显示:disp1=110-cnt;乙道时间显示:disp2=110-cnt;S7:cnt=110-114;甲道时间显示:disp1=115-cnt;乙道时间显示:disp2=115-cnt;2、倒计时时间的显示根据上述关系得到的disp1和disp2 是十六进制数,在送到数码管显示之前,先要将它们转换成二位BCD码表示。
EDA交通灯控制器设计1. 简介交通灯控制器是城市交通系统中常见的设备之一,用于控制交叉路口的交通信号灯。
其中,EDA(Electronic Design Automation)技术在交通灯控制器的设计和开发中起到了重要的作用。
本文将介绍如何使用EDA技术设计一个高效可靠的交通灯控制器。
2. EDA技术在交通灯控制器设计中的应用EDA技术是通过计算机辅助设计软件来简化和自动化电子系统设计的过程。
在交通灯控制器设计中,EDA技术可以帮助工程师完成诸如原理图设计、电路仿真、PCB布局、逻辑综合等任务,大大提高了设计的效率和准确性。
2.1 原理图设计在交通灯控制器的设计中,首先需要进行原理图设计。
EDA软件可以提供丰富的元件库和易于使用的画图工具,使得工程师能够快速地绘制出交通灯控制器的原理图。
通过原理图设计,可以清晰地表示出交通灯控制器的各个部分之间的连接和信号流动关系。
2.2 电路仿真完成原理图设计之后,可以利用EDA软件进行电路仿真。
通过建立适当的电路模型和设置合适的仿真参数,可以验证交通灯控制器的设计是否符合预期。
电路仿真可以帮助工程师检测潜在的问题和优化设计,在实际制造之前发现并解决可能存在的故障。
2.3 PCB布局PCB(Printed Circuit Board)布局是将原理图设计转化为实际电路板的过程。
EDA软件可以根据原理图自动生成PCB布局,将各个元件的位置和连接关系准确地布置在电路板上。
通过使用EDA技术进行PCB布局,可以确保交通灯控制器的电路连接正确可靠,并且满足电磁兼容性和散热要求。
2.4 逻辑综合与优化在交通灯控制器的设计中,逻辑综合是将高级描述语言代码转化为低级逻辑网表的过程。
EDA软件可以根据设计人员提供的代码进行逻辑综合,并进行逻辑优化。
通过逻辑综合与优化,可以减少电路的延迟、功耗、面积等方面的问题,提高交通灯控制器的性能和效率。
3. EDA交通灯控制器设计流程3.1 设计需求分析在开始设计交通灯控制器之前,需要进行设计需求分析。