abb机器人仿真步骤上课讲义
- 格式:doc
- 大小:5.17 MB
- 文档页数:14
abb仿真步骤abb仿真步骤:1、引言1.1 目的1.2 背景1.3 术语定义- ABB: 全球领先的工业自动化和技术提供商- 仿真: 使用计算机模拟技术来模拟现实世界中的实际情况- : 能够自主执行任务的自动化设备2、系统需求2.1 硬件需求2.2 软件需求2.3 附件需求3、安装和配置3.1 安装ABB仿真软件3.2 配置仿真环境3.2.1 定义参数3.2.2 设置工作空间3.2.3 导入模型4、创建模型4.1 基础模型4.1.1 创建基座4.1.2 添加关节和连杆4.1.3 设置关节参数4.2 传感器模型4.2.1 添加传感器设备4.2.2 设置传感器参数4.3 环境模型4.3.1 添加工作环境模型4.3.2 设置物体属性和碰撞检测5、程序编写与调试5.1 编写控制程序5.2 调试程序5.3 仿真运行6、结果分析与优化6.1 分析仿真结果6.2 优化运动轨迹6.3 优化碰撞检测和避障策略7、实验验证7.1 准备实验场地和设备7.2 实施仿真实验7.3 分析实验结果8、总结与展望8.1 本文档的贡献8.2 可能的改进方向附件:- 仿真软件安装文件- 仿真环境模型文件- 实验结果分析数据表格法律名词及注释:1、仿真:在计算机上对实际系统进行虚拟仿真,以检验系统的性能、优化设计和预测行为。
2、:能够自主执行任务的自动化设备。
3、模型:在仿真中使用的虚拟对象,可以是、传感器设备或环境物体。
4、避障策略:在遇到障碍物时采取的规定动作,以避免碰撞。

ABB机器人操作培训资料第一章:ABB机器人概述第二章:ABB机器人的基本操作2.1机器人的启动和关闭启动机器人之前,需要确保机器人的电源已连接,机器人的主电源开关已打开。
然后按下机器人的启动按钮,等待机器人进入工作状态。
关闭机器人时,先按下手持控制器上的停止按钮,然后按下机器人面板上的停止按钮,最后关闭机器人的主电源开关。
2.2机器人的操作模式自动模式是机器人的正常工作模式,可以执行预先编程好的任务。
远程模式是通过计算机或其他远程设备进行控制和监控机器人的工作。
在远程模式下,机器人可以通过网络连接远程监控和操作。
手动模式是用手持控制器直接操控机器人的运动。
在手动模式下,操作人员可以通过手持控制器的按钮和摇杆来控制机器人的动作。
2.3机器人的示教操作机器人的示教操作是为了将人的运动或操作转化为机器人的动作。
ABB机器人有两种示教方式:离线示教和在线示教。
离线示教是在计算机上进行示教操作,然后将示教好的程序上传到机器人。
离线示教可以提高程序的精度和效率,并减少示教的时间。
在线示教是在机器人附近进行示教操作,将操作人员的动作直接传递给机器人。
在线示教方便实时调整机器人的动作,但示教效率较低。
第三章:ABB机器人的安全操作3.1安全保护装置3.2安全操作规程在操作ABB机器人时,操作人员要遵守安全操作规程,如正确佩戴个人防护装备、不超出机器人工作范围、不直接触碰机器人等。
3.3紧急情况的处理在紧急情况下,如机器人发生故障或不正常动作,操作人员要立即按下手持控制器上的急停按钮,并报告给相关人员进行处理。
第四章:ABB机器人的故障排除4.1故障分类4.2故障排除步骤故障排除的步骤包括观察、诊断和修复。
操作人员可以通过观察机器人的状态和报警信息,诊断故障的原因,并进行相应的修复。
第五章:ABB机器人的维护保养5.1机器人的定期维护5.2机器人的保养记录对于每次维护保养,操作人员应该记录相关信息,包括维护日期、维护内容和维护人员等。
目录•机器人基础知识•abb机器人概述•机器人基本操作与编程•机器人高级操作与维护•机器人集成与应用案例•机器人安全与防护知识机器人基础知识机器人的定义与分类机器人的定义机器人是一种能够自动执行任务的机器系统。
它可以接受人类指挥,也可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人的分类根据机器人的应用环境和功能特点,机器人可分为工业机器人、服务机器人、特种机器人等。
0102 03第一代机器人示教再现型机器人,主要由机器手控制器和示教盒组成,可按预先引导动作记录下信息重复再现执行。
第二代机器人感觉型机器人,如具有视觉、触觉、听觉等外部传感器,能实际检测工作环境变化给机器人反馈信号,控制其操作机构。
第三代机器人智能型机器人,是第二代机器人的发展,具有多种感知功能,可进行复杂的逻辑思维、判断和决策,在作业环境中独立行动。
机器人的发展历程ABDC工业制造领域机器人在工业制造领域的应用非常广泛,如焊接、装配、喷涂、搬运等。
它们可以提高生产效率、降低生产成本、提高产品质量等。
医疗卫生领域机器人在医疗卫生领域的应用也越来越多,如手术机器人、康复机器人、护理机器人等。
它们可以协助医生进行手术操作、帮助患者进行康复训练、提供日常的护理服务等。
军事领域机器人在军事领域的应用也越来越受到关注,如无人侦察机、无人战斗机、排爆机器人等。
它们可以执行高风险的任务、提高作战效率、减少人员伤亡等。
服务领域机器人在服务领域的应用也越来越多,如餐厅服务员、导游讲解员、智能家居等。
它们可以提供便捷的服务、提高服务质量、改善人们的生活品质等。
机器人的应用领域abb机器人概述abb机器人简介领先的工业机器人技术ABB作为全球领先的工业机器人制造商,提供先进的机器人技术和解决方案。
广泛的应用领域ABB机器人被广泛应用于焊接、装配、搬运、喷涂等领域,提高生产效率和产品质量。
不断创新和发展ABB致力于机器人技术的不断创新和发展,推动工业4.0和智能制造的进步。

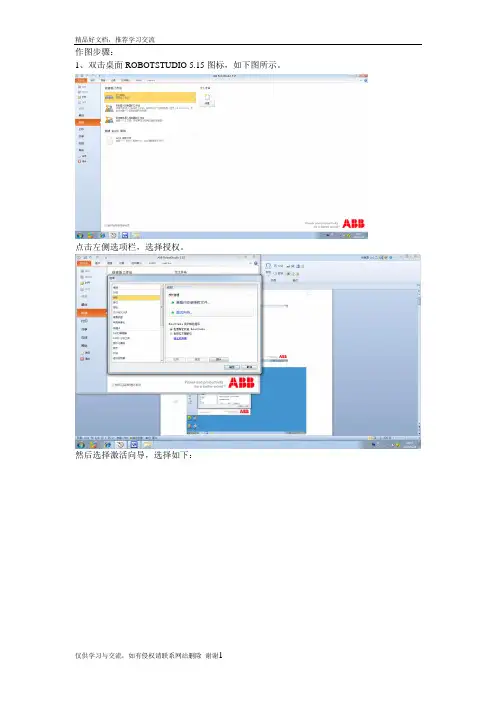
作图步骤:1、双击桌面ROBOTSTUDIO 5.15图标,如下图所示。
点击左侧选项栏,选择授权。
然后选择激活向导,选择如下:2、点击创建文件,出现如下界面。
3、选择机器人模型,点击ABB模型库,出现如下界面,选择IRB2600.把承重能力改为20KG.4、然后点击导入模型库,下拖选择MYTOOL后,然后把左侧边mytool工具拖到IRB2600-20-165-01,机器人上自动安装了喷头工具。
5、然后点击机器人系统菜单,选择从布局创建系统。
在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。
在主菜单中,一定要修改工具,把原始的tool10改为mytool。
或者,在放入机器人时,即完成此项设置,可以不需要修改此项。
一直选择下一个,即可成功。
成功后,屏幕右下角变为绿色。
5、选择建模,在菜单中选择固体,再选择矩形体。
6、选择矩形体后,设置矩形体的长宽高参数为400、500、400后,点击创建,后关闭,即可在屏幕上看到矩形体。
在此项中选择左侧布局后,双击部件1,修改名称为box。
7、点击菜单中大地坐标中的移动,即可移动矩形体。
此项中一定要注意看俯视图,使正方体在机器人运动范围内,否则出错。
8、点击基本菜单中的路径。
一种路径就设置为PATH10,如果有其他,就要多设置几个路径。
后选择捕捉末端和手动线性,并把屏幕右下方的几个参数设置为MOVEJ,V300,Z为fine,准备设置示教指令。
9、做6个示教指令,第一个和最后一个为MOVEJ,其他都为MOVEL。
每移动一个点,点一次示教指令。
10、设置完示教指令后,点击基本菜单下同步,选择同步到VC 然后,所有同步下选项都选择,点击确定即可。
11、然后选择仿真菜单。
首先点击仿真设定,把原有路径删除,把新的路径添加到主队列中,然后确定。
12、设定好后,点击播放,即可进行仿真。
13、如需要录像,则应该先点击仿真录像,后在点击播放,即可进行仿真录像。
14、最终保存和打包。
作图步骤:1、双击桌面ROBOTSTUDIO 5.15图标,如下图所示。
点击左侧选项栏,选择授权。
然后选择激活向导,选择如下:2、点击创建文件,出现如下界面。
3、选择机器人模型,点击ABB模型库,出现如下界面,选择IRB2600.把承重能力改为20KG.4、然后点击导入模型库,下拖选择MYTOOL后,然后把左侧边mytool工具拖到IRB2600-20-165-01,机器人上自动安装了喷头工具。
5、然后点击机器人系统菜单,选择从布局创建系统。
在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。
在主菜单中,一定要修改工具,把原始的tool10改为mytool。
或者,在放入机器人时,即完成此项设置,可以不需要修改此项。
一直选择下一个,即可成功。
成功后,屏幕右下角变为绿色。
5、选择建模,在菜单中选择固体,再选择矩形体。
6、选择矩形体后,设置矩形体的长宽高参数为400、500、400后,点击创建,后关闭,即可在屏幕上看到矩形体。
在此项中选择左侧布局后,双击部件1,修改名称为box。
7、点击菜单中大地坐标中的移动,即可移动矩形体。
此项中一定要注意看俯视图,使正方体在机器人运动范围内,否则出错。
8、点击基本菜单中的路径。
一种路径就设置为PATH10,如果有其他,就要多设置几个路径。
后选择捕捉末端和手动线性,并把屏幕右下方的几个参数设置为MOVEJ,V300,Z为fine,准备设置示教指令。
9、做6个示教指令,第一个和最后一个为MOVEJ,其他都为MOVEL。
每移动一个点,点一次示教指令。
10、设置完示教指令后,点击基本菜单下同步,选择同步到VC 然后,所有同步下选项都选择,点击确定即可。
11、然后选择仿真菜单。
首先点击仿真设定,把原有路径删除,把新的路径添加到主队列中,然后确定。
12、设定好后,点击播放,即可进行仿真。
13、如需要录像,则应该先点击仿真录像,后在点击播放,即可进行仿真录像。
14、最终保存和打包。
目录1培训手册介绍---------------------------------------------22系统安全与环境保护---------------------------------------------33机器人综述---------------------------------------------54机器人示教--------------------------------------------125机器人启动--------------------------------------------256自动生产--------------------------------------------277 编程与测试--------------------------------------------328 输入输出信号--------------------------------------------509 系统备份与冷启动--------------------------------------------5210 文件管理--------------------------------------------54在没有声明的情况下,文件中的信息会发生变化。
上海A B B工程有限公司不对此承担责任。
对文件中可能出现的错误,上海A B B工程有限公司不对此承担责任。
对于使用此文件或者此文件提及的软硬件所导致的部分或者严重性错误,上海A B B工程有限公司无论如何不对此承担责任。
没有上海A B B工程有限公司书面允许,此文件的任何部分不得拷印或复制,并且其中内容也不能转于第三方和用作非法目的。
否则将追究其法律责任。
文件中如有不详尽处,参阅<< User Guide >>、<< Product Manual >>、<< RAPID Reference Manual >>。
abb机器人仿真步骤ABB 机器人仿真步骤嘿,朋友们!今天咱们来聊聊 ABB 机器人仿真那些事儿。
先来说说为啥要搞这个仿真,就好比你要去一个陌生的地方旅行,提前在地图上看看路线,心里有个底,这仿真就跟提前探路差不多。
那咱们开始第一步,得先把机器人的模型给整出来。
这就像是给机器人画个画像,得画得像、画得准。
我之前在操作的时候,就有一次模型没弄好,结果仿真的时候机器人的动作那叫一个别扭,就好像一个人手脚不协调,别提多搞笑了。
模型弄好了,接下来就是设置环境。
想象一下机器人要在一个什么样的场景里工作,是在工厂车间,还是在仓库里搬东西?这环境设置可得仔细,有一回我就忽略了一个小小的障碍物,结果机器人在仿真中撞上去了,那场面,真让我哭笑不得。
然后就是给机器人编程啦,这就像是给机器人下达指令,告诉它该怎么做。
编程的时候得思路清晰,每一个动作、每一个时间点都要考虑到。
我记得有一次,因为一个指令的时间设置错了,机器人的动作快了一拍,整个流程都乱套了。
编程完成,就到了调试环节。
这就像是给机器人做体检,看看有没有啥毛病。
调试的时候要特别有耐心,一点点地找问题,解决问题。
有一次我调试了好久,都快没信心了,结果最后发现只是一个参数设置错了,改过来之后,那叫一个顺畅。
再然后,就是运行仿真啦。
看着机器人按照我们设定的程序动作,那感觉真的很棒。
不过有时候也会出现意外,比如机器人的动作不够流畅,或者没有达到预期的效果。
这时候就得返回去,重新检查各个环节,直到满意为止。
最后,对仿真的结果进行评估和优化。
看看机器人的工作效率怎么样,动作是否合理。
如果有需要,就再调整调整,让它变得更完美。
总之,ABB 机器人仿真可不是一件简单的事儿,每一个步骤都需要我们认真对待,仔细操作。
就像搭积木一样,一块一块地搭好,才能搭出漂亮的城堡。
希望大家在操作的时候都能顺顺利利,让机器人乖乖听话,为我们工作!。
a b b机器人仿真步骤
作图步骤:
1、双击桌面ROBOTSTUDIO 5.15图标,如下图所示。
点击左侧选项栏,选择授权。
然后选择激活向导,选择如下:
2、点击创建文件,出现如下界面。
3、选择机器人模型,点击ABB模型库,出现如下界面,选择IRB2600.把承重能力改为20KG.
4、然后点击导入模型库,下拖选择MYTOOL后,然后把左侧边mytool工具拖到IRB2600-20-165-01,机器人上自动安装了喷头工具。
5、然后点击机器人系统菜单,选择从布局创建系统。
在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。
在主菜单中,一定要修改工具,把原始的tool10改为mytool。
或者,在放入机器人时,即完成此项设置,可以不需要修改此项。
一直选择下一个,即可成功。
成功后,屏幕右下角变为绿色。
5、选择建模,在菜单中选择固体,再选择矩形体。
6、选择矩形体后,设置矩形体的长宽高参数为400、500、400后,点击创建,后关闭,即可在屏幕上看到矩形体。
在此项中选择左侧布局后,双击部件1,修改名称为box。
7、点击菜单中大地坐标中的移动,即可移动矩形体。
此项中一定要注意看俯视图,使正方体在机器人运动范围内,否则出错。
8、点击基本菜单中的路径。
一种路径就设置为PATH10,如果有其他,就要多设置几个路径。
后选择捕捉末端和手动线性,并把屏幕右下方的几个参数设置为MOVEJ,V300,Z为fine,准备设置示教指令。
9、做
6个示教指令,第一个和最后一个为MOVEJ,其他都为MOVEL。
每移
动一个点,点一次示教指令。
10、设置完示教指令后,点击基本菜单下同步,选择同步到VC
然后,所有同步下选项都选择,点击确定即可。
11、然后选择仿真菜单。
首先点击仿真设定,把原有路径删除,把新的路径添加到主队列中,然后确定。
12、设定好后,点击播放,即可进行仿真。
13、如需要录像,则应该先点击仿真录像,后在点击播放,即可进行仿真录像。
14、最终保存和打包。
先点击文件菜单,然后选择保存。
保存后,在点击“共享”,后选择第一个选项“打包”。
即可完成文件程序打包。
至此,所有过程完成。