第3章 平面任意力系
- 格式:doc
- 大小:1.31 MB
- 文档页数:13
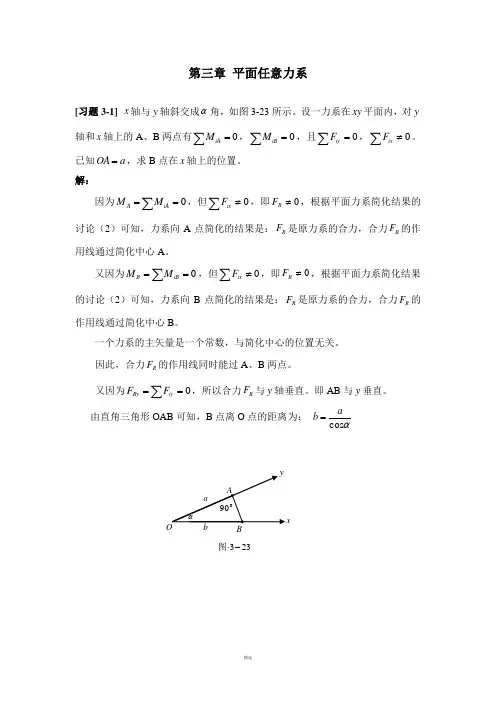
第三章 平面任意力系[习题3-1] x 轴与y 轴斜交成α角,如图3-23所示。
设一力系在xy 平面内,对y 轴和x 轴上的A 、B 两点有0=∑iA M ,0=∑iB M ,且0=∑iy F ,0≠∑ix F 。
已知a OA =,求B 点在x 轴上的位置。
解:因为0==∑iA A M M ,但0≠∑ix F ,即0≠R F ,根据平面力系简化结果的讨论(2)可知,力系向A 点简化的结果是:R F 是原力系的合力,合力R F 的作用线通过简化中心A 。
又因为0==∑iB B M M ,但0≠∑ix F ,即0≠R F ,根据平面力系简化结果的讨论(2)可知,力系向B 点简化的结果是:R F 是原力系的合力,合力R F 的作用线通过简化中心B 。
一个力系的主矢量是一个常数,与简化中心的位置无关。
因此,合力R F 的作用线同时能过A 、B 两点。
又因为0==∑iy Ry F F ,所以合力R F 与y 轴垂直。
即AB 与y 垂直。
由直角三角形OAB 可知,B 点离O 点的距离为: αcos ab =[习题3-2] 如图3-24所示,一平面力系(在oxy 平面内)中的各力在x 轴上投影之代数和等于零,对A 、B 两点的主矩分别为m kN M A ⋅=12,m kN M B ⋅=15,A 、B 两点的坐标分别为(2,3)、(4,8),试求该力系的合力(坐标值的单位为m)。
解:由公式(3-5)可知:)(212R O O O F M M M +=)(R B A B F M M M +=)()(Ry B Rx B A B F M F M M M ++=依题意0=Rx F ,故有:)(Ry B A B F M M M +=)24(1215-⨯+=Ry F 32=Ry F )(5.1kN F Ry = kN F F Ry R 5.1==)(85.112m F M a R A ===故C 点的水平坐标为:m x 6-=。

1第三章力系的平衡§3–1 平面力系的平衡方程§3–2 空间力系的平衡方程§3–3 物体系统的平衡方程§3–4 静定与静不定的基本概念§3-1 平面力系的平衡方程由于=0 为力平衡M O =0 为力偶也平衡所以平面任意力系平衡的充要条件为:力系的主矢F R 和主矩M O 都等于零,即:)()(22=+=∑∑Y X F R 0)(==∑i O O F m M 1、平面任意力系的平衡方程R F=∑X 0)(=∑i A F m 0)(=∑i B F m ②二矩式条件:x 轴不AB连线⊥0)(=∑i A F m 0)(=∑i B F m 0)(=∑i C F m ③三矩式条件:A ,B ,C 不在同一直线上上式有三个独立方程,只能求出三个未知数。
=∑X 0=∑Y 0)(=∑i O F m ①一矩式①平面汇交力系=∑xF 0=∑yF2、平面特殊力系的平衡方程②平面力偶系=∑M ③平面平行力系=∑y F 0)(=∑F M O 0)(=∑F MB0)(=∑F M A AB 不x 轴⊥[例] 已知:P , a , 求:A 、B 两点的支座反力?解:①选AB 梁研究②画受力图(以后注明解除约束,可把支反力直接画在整体结构的原图上))(=∑i A F m 由32 ,032PN a N a P B B =∴=⋅+⋅-0=∑X 0=A X 0=∑Y 3,0PY P N Y A B B =∴=-+解除约束,0==∑A X X 由022;0)(=⋅-+⋅⋅+⋅=∑a P m aa q a R F m B A 0=∑Y 0=--+∴P qa R Y B A )kN (122028.01628.02022=⨯+-⨯-=+--=P a m qa R B )kN (24128.02020=-⨯+=-+=B A R qa P Y [例] 已知:P =20kN, m =16kN·m, q =20kN/m, a =0.8m求:A 、B 的支反力。
第三章平面任意力系一、要求1、掌握平面任意力系向一点简化的方法。
会应用解析法求主矢和主矩。
熟知平面任意力系简化的结果。
2、深入理解平面任意力系的平衡条件及平衡方程的三种形式。
3、能熟练地计算在平面任意力系作用下物体和物体系的平衡问题。
4、理解简单桁架的简化假设,掌握计算其杆件内力的节点法和截面法。
二、重点、难点1、本章重点:平面任意力系向作用面内任一点的简化,力系的简化结果。
平面任意力系平衡的解析条件,平衡方程的各种形式。
物体及物体系平衡问题的解法。
2、本章难点:主矢与主矩的概念。
物体系的平衡问题。
三、学习指导1、力的平移定理,是力系向一点简化的理论基础。
一个力平移后,它对物体的作用效果发生了改变,要想保持原来力的作用效果,必须附加一个力偶。
2、平面任意力系向一点简化的方法:平面任意力系向一点简化,是依据力的平移定理,将作用在物体上的各力向任一点(称为简化中心)平移,得到作用在简化中心的一个平面汇交力系和平面力偶系(附加力偶系)。
两个力系合在一起与原力系等效。
这样,一个复杂的力系就分解成了两个简单的力系。
然后,分别求平面汇交力系的合力和平面力偶系的合力偶,则原力系由作用在简化中心的一个力和一个力偶所代替,该力的大小和方向等于力系的主矢,该力偶的力偶矩等于力系的主矩。
于是,平面任意力系的简化就成了计算力系的主矢和主矩的问题。
3、主矢和主矩:平面任意力系中,各力的矢量和称为力系的主矢,即平面任意力系中,各力对于简化中心的力矩的代数和称为力系的主矩,即关于主矢和主矩,需要弄清楚以下几点:(1)主矢不是力,主矩不是力偶。
主矢和主矩是描述平面任意力系对物体作用效果的量。
(2)主矢是自由矢量,只有大小和方向,描述平面任意力系使物体平动的作用效果。
平面任意力系的主矩是代数量,只有大小和正负,描述平面任意力系使物体绕点转动的作用效果。
(3)主矢与简化中心的选择无关。
从这个意义上讲,主矢是力系的一个不变量。
主矩与简化中心的选择有关。
第三章平面任意力系3.1 平面任意力系的简化·主矢与主矩3.2 平面任意力系的平衡条件与平衡方程3.3 物体系统的平衡·静定与静不定问题3.4 平面简单桁架的内力计算3.1 平面任意力系的简化·主矢与主矩所谓平面任意力系是指力系中各力的作用线在同一平面内且任意分布的力系,简称平面力系。
在实际工程中经常会遇到平面任意力系的情形,例如,下图所示的曲柄连杆机构,受力F ,矩为M 1,M 2的力偶以及支座反力F Ax ,F Ay 和F N 的作用,这些力及力偶构成平面任意力系。
3、固定端(或插入端)约束FAxFAyM AA4、平面任意力系的简化结果分析(1)简化为一个力偶当F R = 0,M O ≠0则原力系合成为合力偶,其矩为∑=)(i O O M M F 此时主矩与简化中心选择无关,主矩变为原力系合力偶。
由此很容易证得平面任意力系的合力矩定理:平面任意力系的合力对作用面内任一点的矩等于力系中各力对同一点的矩的代数和。
即∑=)()(R i O O M M F F 当F R ’= 0,M O = 0则原力系平衡。
(3)平面力系平衡例题3-3考虑一小型砌石坝的1m长坝段,受重力和的静水压力作用。
已知h = 8 m,a= 1.5 m,b= 1 m,P1=600 kN,P2=300 kN,单位体积的水重γ = 9.8 kN/m3。
求(1)将重力和水压力向O点简化的结果,(2)合力与基线OA的交点到点O的距离x,以及合力作用线方程。
解:(1)以点O 为简化中心,求主矢∑=′x RxF F ()()kNF F yxR1.95322=+=′∑∑F 329.0cos =′=∑RxF F θ944.0cos −=′=∑RyF F β°±=79.70θ°±°=21.19180β故主矢在第四象限内,与x 轴的夹角为°−79.70F R ’M O θβkN 6.313=22121h qh γ==kN P P F F y Ry 90021−=−−==′∑(2)以点O 为简化中心,求主矩F R ’M O θβ()()()q M P M P M M O O O O ++=21bP a P hh 212321−+×−=γmkN ⋅−= 27.236表明主矩的方向与假设方向相反,及主矩的方向为顺时针。
第3章 平面任意力系一、是非题(正确的在括号内打“√”、错误的打“×”)1.某平面力系向两A 、B 点简化,主矩都为零,则此力系一定平衡。
( × ) 2.力沿其作用线移动不改变力对点之矩的效果。
( √ ) 3.力系简化的最后结果为一力偶时,主矩与简化中心无关。
( √ ) 4.用截面法解桁架问题时,只需截断所求部分杆件。
( √ ) 5.判断结构是否静定,其根据是所有的未知量能否只通过列平衡方程全部求出。
( √ ) 6.平面任意力系向任一点简化后,若主矢R 'F =0,而主矩0O M ≠,则原力系简化的结果为一个合力偶,合力偶矩等于主矩,此时主矩与简化中心位置无关。
( √ ) 7.平面任意力系向任一点简化后,若主矢R'F ≠0,而主矩O M =0,则原力系简化的结果为一个合力,且合力通过简化中心。
( √ )8.在一般情况下,平面任意力系向作用面内任一点简化,可以得到一个合力和一个合力偶矩。
( × )9.已知作用于刚体上所有力在某一坐标轴上投影的代数和等于零,则这些力的合力为零,刚体处于平衡。
( × )10.平面任意力系平衡的必要与充分条件是:力系的主矢和力系对任何一点的主矩都等于零。
( √ )11.桁架是一种由杆件彼此在两端用铰链连接而成的结构,它在受力以后几何形状可以发生改变。
( × ) 二、填空题1.在简化一已知平面任意力系时,选取不同的简化中心,主矢相同主矩不相同。
2.一般情况下,对于由n 个物体所组成的物体系统可以列出 3n 独立平衡方程。
3.主矢与简化中心位置无关,而主矩与简化中心位置有关。
4.在平面任意力系中,合力对任一点之矩,等于各分力对同一点之矩的代数和,即R ()()O OM M =∑F F ,称之为合力矩定理。
5.若物体系中所有未知量数目不超过独立方程个数,则所有未知量可由平衡方程解出,这类问题称为静定问题;反之则为静不定问题。
6.如果从桁架中任意消除一根杆件,桁架就会活动变形,称这种桁架为静定桁架;反之则为超静定桁架。
7.在平面静定桁架中,杆件的数目m 与节点的数目n 之间的关系是m=2n -3。
8.计算平面静定桁架杆件内力的两种基本方法是节点法和截面法。
三、选择题1.如图3.18所示平面力系向A 点简化得主矢R A 'F 和主矩A M ,向B 点简化得主矢R B 'F 和主矩B M 。
以下四种说法,哪一个是正确的?( D )(A) R R A B ''=F F ,A B M M = (B) R R A B ''≠F F ,A B M M = (C) R R A B ''≠F F ,A B M M ≠ (D) R R A B ''=F F ,A B M M ≠图3.182.如图3.19所示平面内一力系13F F =,24F F =,此力系简化的最后结果为( C )。
(A) 作用线过点B 的合力 (B) 一个力偶(C) 作用线过点O 的合力 (D) 力系平衡3.如图3.20所示刚体在一个平面任意力系作用下处于平衡,以下四组平衡方程中哪一组是不独立的( B )。
(A)0xF =∑,0F ξ=∑,()0AM =∑F(B) ()0O M =∑F ,()0AM =∑F ,()0BM =∑F (C) ()0OM =∑F ,()0CM =∑F ,0yF =∑ (D) 0x F =∑,0y F =∑,()0OM =∑F图3.19 图3.204.如图3.21所示的四种结构中,各杆重忽略不计,其中哪一种结构是静定的( c )。
(b)(c)(a)图3.215.如图3.22所示的四种结构中,梁、直角刚架和T 形刚杆的自重均忽略不计,其中哪一种结构是静不定的。
( b )6.平面任意力系向一点简化得到一个力和一个力偶,这个力作用在( D )。
(A) x 轴上 (B) y 轴上 (C) 坐标系原点 (D) 简化中心(d)(c)(b)(a)图3.227.重量为W 的均匀杆EF 放在光滑的水平面上,在两端沿其轴线方向作用拉力P 和Q 如图3.23所示,且P Q >。
如将杆在A 、B 、C 三个截面处均分四段,则在A 、B 、C 三处截面的张力的关系为( B )。
(A) A B C S S S == (B) C B A S S S <<(C) A B C S S S <<(D) C A B S S S <<图3.238.如图3.24所示三种受力情况,关于对支座A 、B 约束反力大小正确的答案是( B )。
(A) 三种情况相同,4A B F F F ==(B) 三种情况相同,2A B F F F == (C) 三种情况相同,A B F F F == (D) 三种情况不相同(b) (a)(c)图3.249.矩形ABCD 平板受力图如图3.25所示。
(A)、(B)、(C)、(D)为其四组平衡方程,其中只有( B )组是独立的方程。
(A) ()0()00A B x M M F ⎧=⎪⎪=⎨⎪=⎪⎩∑∑∑F F(B) ()0()00A D x M M F ⎧=⎪⎪=⎨⎪=⎪⎩∑∑∑F F(C) ()0()0()0B E CM M M ⎧=⎪=⎨⎪=⎩∑∑∑F F F(D) ()0()0()0()0A B CD M M M M ⎧=⎪=⎪⎨=⎪⎪=⎩∑∑∑∑F F F F10.某平面平行力系,已知1234510N 4N 8N 10N F F F F F =====,,,,受力情况如图3.26所示,尺寸单位为cm ,试问此力系简化的结果是否与简化中心的位置有关? ( A )(A) 无关 (B) 有关(C) 若简化中心在Ox 轴上,则与简化中心无关 (D) 若简化中心在Oy 轴上,则与简化中心无关yAB CE DxF FxDDy F A FM图3.25 图3.26四、计算题3-1 重物悬挂如图3.27所示,已知G =1.8kN ,其他重量不计。
求铰链A 的约束反力和杆BC 所受的力。
解:选AB 和滑轮D 组成的系统为研究对象,受力分析如图所示。
列平衡方程,有∑=0xF045cos o =--D B Ax F F F∑=0yF 045sin o=-+G F F BAy∑=0)(F AM 03.01.06.045sin o=⨯-⨯+⨯G F F DB图3.27其中:kN 8.1==G F D 联立求解,可得:N 2400=Ax F ,N 1200=Ay F ,N 5.848=B F3-2 求如图3.28所示平面力系的合成结果,长度单位为m 。
解:平面力系向简化中心O 点简化,有N 054500400'=⨯-==∑xiRx F F N 053500100200'=⨯---==∑yiRyFF主矢为N 02'2''=+=Ry Rx R F F F主矩为m N 2606.25350021008.0400)(⋅=⨯⨯+⨯-⨯-==∑i O O F MM3-3求如图3.29(a)、(b)所示平行分布力的合力和对于点A 之矩。
(b)(a)q图3.29解:(a )平行分布力的合力为:qa F R =' ( ← )对于点A 之矩的矩为221qa M A =( ) (b )平行分布力的合力为:ql F R 21'=( ↓ ) 对于点A 之矩的矩为图3.28231ql M A =() 3-4静定多跨梁的荷载及尺寸如图3.30(a)、(b)所示,长度单位为m ,求支座约束反力。
(a)20kN /m(b)图3.3020kN /mC20kN /mC解:(a) 分别选整体和杆BC 为研究对象,受力分析如图所示。
分别列平衡方程,有整体:∑=0xF 030sin o=-CAxF F∑=0y F 062030cos o=⨯-+CAy F F∑=0)(F A M 0662040930cos o=⨯⨯--⨯+CA F M杆BC : ∑=0)(F B M 03620630cos o=⨯⨯-⨯CF联立求解,可得:kN 320=Ax F ,N 60k F Ay =,m kN 220⋅=A M ,kN 340=C F(b) 分别选整体和杆CD 为研究对象,受力分析如图所示。
分别列平衡方程,有整体:∑=0xF 0=AxF∑=0y F 045.25=⨯--++DyBy Ay F F F∑=0)(F A M 05445.21582=-⨯⨯-⨯-⨯+⨯DyBy F F2.5kN/mDyDy杆CD : ∑=0)(F C M05125.24=-⨯⨯-⨯Cy F联立求解,可得:0=Ax F ,N 5.2k F Ay -=,kN 15=By F ,kN 5.2=Dy F3-5 均质圆柱体O 重为P ,半径为r ,放在墙与板BC 之间,如图3.31所示,板长BC =L ,其与墙AC 的夹角为α,板的B 端用水平细绳BA 拉住,C 端与墙面间为光滑铰链。
不计板与绳子自重,问α角多大时,绳子AB 的拉力为最小。
解:分别选圆柱体O 和板BC 为研究对象,受力分析如图所示。
分别列平衡方程,有圆柱体O :∑=0yF0sin 2=-P F N α解得:αsin 2PF N =板BC :∑=0)(F C M0cos 2tan/'2=⨯+⨯-ααL F r F B N其中:2'2N N F F =-,解得αααααcos )cos 1(Pr2tancos sin -=⨯=L L r P F B引入αααcos )cos 1()(-=f ,下面求)(αf 的最大值。
由于0sin cos 2sin )('=+-=ααααf ,有21cos =α,即o 60=α,此时,)(αf 有极大值,而B F 有极小值,其值为L F B Pr 4min =。
3-6 求图3.32所示悬臂梁的固定端的约束反力。
已知2M qa =。
解:选悬臂梁AB 为研究对象,受力分析如图所示。
列平衡方程,有图3.31 2N图3.32q F M∑=0xF 0=AxF∑=0y F 02=⨯-a q F Ay∑=0)(F A M 02=⨯⨯-+a a q M M A其中2M qa =。
联立求解,可得:0=Ax F ,qa F Ay 2=,2qa M A =3-7 如图3.33(a)、(b)所示承重架,不计各杆与滑轮的重量。
A 、B 、C 、D 处均为铰接。
已知AB =BC =AD =250mm ,滑轮半径R =100mm ,重物重W =1000N 。
求铰链A 、D 处的约束反力。
(b)(a)图3.33解:(a) 分别选整体和BD 杆为研究对象,受力分析如图所示。