车辆主动悬架系统的 LMS 自适应控制
- 格式:pdf
- 大小:260.11 KB
- 文档页数:4

汽车半主动悬架的模型参考自适应控制背景与意义汽车平顺性和行驶安全性始终是矛盾的两个方面。
对汽车悬架的控制就是为了在平顺性和行驶安全性之间寻找一个最优的结合点。
理论上,主动悬架能获得一个优质的隔振系统,实现理想悬架的控制目标。
但主动悬架能耗高,成本高,且控制系统复杂。
半主动悬架结构简单,制造方便,几乎不需要向系统提供附加能量,同时,在控制品质上又能接近于主动悬架,因而有着广阔的应用前景。
模型参考的自适应控制器自适应控制器由可调前置控制器G和状态反馈控制器F 两部分组成(1)最终的设计即为求G'与F' 过程,也就是模型参考自适应控制器的控制律求系统的自适应控制律,还需要求出系统的参考模型的状态方程与对象模型的状态方程车辆动力学参考模型为:通过受力分析可求得动力学方程为:(2)式中:m s,为簧载质量;x sr为簧载质量的位移;z r为非簧载质量的位移;d为路面输人;k s为悬架刚度;k t为轮胎的刚度;f dr为天棚控制阻尼力将滤波白噪声作为路面输人模型式中: 为一个白噪声过程;v为车速;a为与路面类型有关的系数。
其自相关函数为式中: 为路面不平度的方差(3)由(2)、(3)式可求得参考模型的状态方程为:(4)式中:Am 、Bm 、Cm为系统矩阵车辆动力学模型为:通过受力分析可求得动力学方程为:(5)同样可求得系统的状态方程为(6)结合(1)、(4)、(6)式,有广义状态方程要实现对象模型与参考模型间的渐近自适应跟踪,必须分别满足下列状态收敛条件和参数收敛条件(7)要使式(7)的前两个方程有解,必须增加约束条件(8)设F(e,t)=F0,G(e,t)=G0时,参考模型与可调系统达到完全的匹配,即(9)将式(9)代人式(8),得(12)构造以下LYAPUNOV 函数(10)对式(10)两边求导(11)因Am为稳定矩阵,必有PAm + P=-Q ,Q 为正定矩阵。
式(11)右边第一项是负定的。
第21卷 第6期2001年12月北京理工大学学报Jo urnal of Beijing Instit ute o f T echnolog y V o l.21 No.6D ec.2001 文章编号:1001-0645(2001)06-0706-04车辆主动悬架的自适应控制研究丁 科, 侯朝桢(北京理工大学自动控制系,北京 100081)摘 要:为了提高车辆主动悬架系统的性能,改善车辆的乘坐舒适性和操纵稳定性.采用具有在线辨识的最小方差自校正调节器,通过对主动悬架实体装置的台架实验研究,使自适应控制器在不同激励信号作用下,都具有很好抑制车体振动的特点.在车辆主动悬架系统中,自适应控制具有设计新颖,实用性强,特别对减振效果要求高的车辆,更能发挥其优点.关键词:车辆主动悬架;自适应控制;台架实验中图分类号:T P 273.2;U 463.33 文献标识码:A收稿日期:20010515基金项目:部级基金资助项目作者简介:丁 科(1973-),男,博士生;侯朝桢(1938-),男,教授,博士生导师.国外一些发达工业国家虽然已在某些车型上应用了主动悬架的产品,但在控制算法的改进、系统稳定性的提高、性能价格比的降低等方面仍有大量的工作要做.目前国内的研究尚处于悬架系统控制算法的优化设计和理论分析阶段.作者针对车辆主动悬架系统的动、静态特性,研究并选择一种满足系统要求的自适应控制器,为国内车辆主动悬架系统减振控制的研究提供一种新的思路,对我国汽车工业缩短与发达工业国家的差距有所帮助[1].1 自适应控制器的设计最小方差自校正调节器按最小输出方差为目标设计自校正控制率,用递推最小二乘估计算法直接估计控制器参数,是一种最简单的自校正控制器.由于车辆主动悬架被控对象的参数未知,故将递推最小二乘参数估计和最小方差控制结合起来,就得到了最小方差自校正调节器[2]估计模型y (t )-b 0u (t -d )=<T (t -d )H +E (t ),式中 H =[g 1g 1…g n gf 1f 2…f n f ]为控制器参数矩阵;<T (t )=[y (t )…y (t -ng )u (t -1)…u (t -n f )]为输入、输出历史数据矩阵.根据估计模型,可以得到递推参数估计H ^(t )=H ^(t -1)+K (t )[y (t )-b 0u (t -d )<T (t -d )H ^(t -1)],K (t )=P (t -1)<(t -d )1+<T (t -d )P (t -1)<(t -d ),P (t )=[I -K (t )<T (t -d )]P (t -1),最小方差控制u (t )=-1b 0<T (t )H ^(t ).2 车辆主动悬架系统目前国内外有关汽车主动悬架的研究文献大多是提出一种控制策略,然后针对控制策略进行计算机仿真研究,以此作为对控制策略的验证.计算机仿真研究简化了汽车主动悬架系统的结构,忽略了实际系统中存在的多种复杂因素和系统部件特性对整个系统性能的影响,其结论往往是理想状态下的情况,大多缺少实验验证.研制主动悬架实验模型的目的就是能够利用该模型,对主动悬架的控制策略、测量手段以及控制效果进行实验研究,特别是能够与被动悬架模型进行比较,通过实验验证所采用的控制策略,发现存在的问题,并对其加以改进与完善.2.1 主动悬架实验模型的设计考虑到激振台等各种实验条件的限制,悬架采用了车身-车轮二自由度模型[3].其结构图如图1所示.悬置与非悬置质量块.悬置与非悬置质量块的质量是根据实际车辆按同比例缩小得到的,而且可调,从而可以改变系统的参数,以便验证在不同情况下主动悬架的性能.油缸及气缸.油缸内径为40m m ,行程范围为±200m m.气缸内径为40m m,根据气缸的容积及所充氮气的压力可计算出悬架刚度.比例换向阀.比例换向阀是采用比例电磁铁进行改型而发展起来的.它具有结构简单、对油洁净度要求不高、价格便宜、性能价格比较高等优点.比例换向阀在控制液流方向的同时,基本上可以精确、线性地控制其流量.但是由于比例换向阀机械特性的影响,使其具有一定的机械和液压死区,在系统控制过程中必须加以补偿.比例换向阀作为控制执行机构的关键部件,其动态特性的好坏直接影响系统的总体性能.因此,选择控制频带宽、死区小的比例换向阀是提高系统控制效果所必须的[4].油源.油源是为主动悬架系统提供能量的.油源的流量和压力等指标根据悬置质量块的质量、油缸活塞的截面积和系统阀压降等参数确定,从而确定油泵等元件的规格要求.在实际车辆上,主动悬架和其它液压系统,如防抱死系统、助力转向系统等共用一个油源,这样可以降低系统成本和提高系统可靠性.本实验模型中,悬架系统静平衡时的油压约为1.2M Pa ,考虑比例阀的双向性,将泵站油源的供油压力设为2.5M Pa .测量系统.两个加速度传感器分别用于测量悬置质量块和非悬置质量块的加速度.位移传感器测量悬置质量块和非悬置质量块的相对位移.连杆机构.在主动悬架系统的实验模型中,由于悬置质量块较重或只与油缸相连,则无法保证其动、静态稳定,为了正常实验和操作安全的需要,必须安装防止悬置质量块水平移动的装置,一般实验多采用导向机构.但是由于导向机构与地基相连,其与运动悬置质量块之间存在较大摩擦,必将对实验结果造成影响.作者针对导向机构的局限性设计了连杆机构,悬置质707 第6期丁 科等:车辆主动悬架的自适应控制研究量块通过两根长连杆与地基相连,因为悬置质量块垂直运动的位移与连杆的长度相比可忽略不计,因此悬置质量块可近似为垂直运动,而且也消除了摩擦所带来的影响.示波器及记录仪.本实验通过示波器对实验过程中系统的各个信号进行监视和测量,同时用磁带机加以记录,以便对实验结果进行分析研究.计算机控制器.控制器负责对系统的数据进行采集、计算和控制输出,是主动悬架系统的中枢.采用计算机作为控制器,大大提高了控制系统的灵活性.实验成功以后,再将控制程序输入单片机作为控制器,从而达到装车的目的.2.2 主动悬架实验采用上面给出的自适应控制器和自适应控制算法编程进行实验,采用激振频率为1Hz,振幅为±5mm的正弦信号.实验数据由计算机采集并记录,采样周期为10ms.当不施加控制时,被动悬架悬置质量块的加速度响应时域分析如图2所示,频域分析如图3所示.而施加自适应控制时,主动悬架悬置质量块的加速度响应时域分析如图4所示,频域分析如图5所示.图2 被动悬架悬置质量块加速度响应图3 被动悬架悬置质量块加速度幅频特性图4 主动悬架自适应控制悬置质量块加速度响应图5 主动悬架自适应控制悬置质量块加速度幅频特性对于其它频率的激励信号进行了实验比较,并对三角波、方波以及频率与幅值变化的正弦波激励信号也进行了实验研究.各种激励信号下主动悬架系统的动态响应性能十分类似,自适应控制的减振效果都比较明显,只是减振效果随激励频率的不同而有所差别.由于实验设备的局限(如比例阀的响应频率较低,油路耐压性能较差,使油源压力不能高于2.5MPa等)则激励频率不能太高,系统在1Hz附近的减振效果最为明显.708北京理工大学学报第21卷 2.3 实验结果及分析统计分析可得,被动悬架悬置质量块加速度的均方差为R pa =0.3437;主动悬架自适应控制悬置质量块加速度的均方差为R aa =0.2715,则主动悬架自适应控制与被动悬架悬置质量块加速度的均方差之百分比为(R aa /R pa )100%=78.99%.可见,主动悬架的减振效果是比较明显的,达到了减振20%以上的目标,这表明所做的计算机仿真是正确的,所采用的自适应控制方法以及用Borland C ++语言所编制的计算机控制程序是可行的和有效的,而且为以后实际装车实验打下了坚实的基础.3 结 论在大量不同路况下,车身垂直加速度能够较可靠地反映路面输入变化,因此根据车身垂直加速度在一定时间内的统计值以及控制器所给出的控制量,自适应控制算法能较准确地在线辨识出最适合当前路况的控制器参数.通过对车辆被动与主动悬架实验研究结果表明,采用最小方差自校正调节器的主动悬架是可行和有效的.同时在研究过程中也遇到了一些新的问题,如隐式自校正在参数辨识过程中收敛速度与控制量有关,如果调节量充裕,则收敛速度会比较快.但对于实际的液压伺服系统,由于其调节量有限,控制器参数收敛较慢,以及自适应控制器的稳定性和鲁棒性等问题,都为以后控制算法的改进积累了丰富的经验.参考文献:[1] 庄继德.汽车电子控制系统工程[M ].北京:北京理工大学出版社,1998.[2] 韩曾晋.自适应控制[M ].北京:清华大学出版社,1995.[3] 金达锋,黄兴惠,陈志林等.主动油气悬架试验模型的研制[J].汽车工程,2000,22(2):100-103.[4] 黄兴惠.汽车主动悬架的试验研究及系统鲁棒稳定性分析与设计[D ].北京:清华大学汽车工程系,1999.The Research on Adaptive Control for ActiveSuspensions of VehicleDING Ke, HOU Chao -zhen(Dept .of A utom atic Contr ol ,Beijing Institut e of T echnolog y ,Beijing 100081,China )Abstract :The adaptiv e controller is used to improv e performances of active suspensions of vehicle to g et comfortable ride and steady control o f vehicle.According to the r esults of the entitative ex perim ents o f activ e suspensions ,the adaptive contro l sy stem has characteristics of elim inating vibration of vehicle under different stim ulations.For active suspensio ns of v ehicle,the adaptive control has the characteristics such as original design and g ood practicability .Particularly ,this metho d is fitter fo r vehicles requir ing antiviberation to a higher deg ree .Key words :active suspension o f vehicle;adaptiv e co ntrol;entitativ e ex perim ents 709 第6期丁 科等:车辆主动悬架的自适应控制研究。
车辆主动悬架系统控制方案设计车辆主动悬架系统是一种利用电子控制和传感器技术来调节车辆悬挂系统的功能。
通过检测车辆的动态状况和路况情况,主动悬架系统能够实时调节悬挂的刚度和阻尼,提升车辆的稳定性和行驶舒适性。
本文将针对车辆主动悬架系统的控制方案进行设计,共分为传感器模块、控制模块和执行模块三个部分。
传感器模块是主动悬架系统的基础,负责采集车辆的动态信息和路况情况。
常用的传感器包括加速度传感器、角度传感器、车速传感器和路况传感器等。
加速度传感器用于检测车辆的加速度和减速度,角度传感器用于检测车辆的倾斜角度,车速传感器用于检测车辆的速度,路况传感器用于检测路面的平整度和颠簸程度。
传感器采集到的数据需要经过滤波和处理后方能使用。
控制模块是主动悬架系统的核心,负责根据传感器模块采集到的数据,进行实时的控制和调节。
控制模块包括控制算法和控制器两部分。
控制算法通常采用PID控制算法,即比例、积分、微分控制算法。
PID控制算法能够根据车辆的动态状况和路况情况,计算出合适的悬挂刚度和阻尼,以提升车辆的稳定性和行驶舒适性。
控制器通常采用微控制器或程序控制器,用于控制悬挂系统的执行器。
执行模块是主动悬架系统的实施部分,负责根据控制模块的指令,实时地调节悬挂的刚度和阻尼。
执行模块包括悬挂系统的执行器和悬挂系统的控制阀。
悬挂系统的执行器通常为液压或电液混合执行器,用于实现悬挂系统的加压或减压。
悬挂系统的控制阀用于控制液压或电液混合执行器的操作,根据控制模块的指令,调节液压或电液混合执行器的工作状态。
在车辆主动悬架系统的控制方案设计中,传感器模块负责采集车辆的动态信息和路况情况,控制模块负责根据传感器模块采集到的数据,进行实时的控制和调节,执行模块负责根据控制模块的指令,实时地调节悬挂的刚度和阻尼。
三个模块之间需要进行信息的传递和交互,以实现整个系统的协调工作。
在实际应用中,车辆主动悬架系统的设计还需要考虑到成本、可靠性和安全性等因素。
汽车底盘悬挂系统的主动与半主动控制方法汽车底盘悬挂系统是整个汽车的重要组成部分,它直接影响着行车的舒适性、稳定性和安全性。
随着科技的不断进步,底盘悬挂系统的控制方式也得到了不断的优化和创新,其中主动与半主动控制方法成为当前研究的热点。
本文将重点介绍汽车底盘悬挂系统的主动与半主动控制方法。
一、主动控制方法主动悬挂系统是指可以主动调节悬挂刚度、高度和阻尼等参数的系统。
主动控制方法通过悬挂系统自身的传感器获取道路情况和车辆状态,再通过电子控制单元(ECU)对悬挂系统进行实时调节,从而保证车辆在不同道路和行驶状态下的稳定性和舒适性。
主动控制方法的优点在于可以根据实际情况主动作出调整,保持车辆在最佳状态下行驶。
例如,当车辆行驶在颠簸路面时,主动悬挂系统会加大阻尼力和提高悬挂高度,从而减小车身的颠簸感;当车辆高速行驶时,主动悬挂系统会降低悬挂高度和减小阻尼力,提高车辆的稳定性。
二、半主动控制方法半主动悬挂系统是指在主动悬挂系统的基础上进行改进,可以根据预设的控制算法主动调节悬挂参数。
与主动悬挂系统相比,半主动悬挂系统需要更少的电子控制单元和传感器,成本较低,但调节效果也相对有限。
半主动控制方法通过预设的控制算法对悬挂系统进行调节,例如将车辆的行驶状态、车速和转向角度等信息输入到控制算法中,再根据算法输出的结果对悬挂系统进行调节。
虽然半主动控制方法的调节精度不如主动控制方法准确,但在提升车辆性能和舒适性方面也有一定的作用。
三、主动与半主动控制方法的比较主动悬挂系统和半主动悬挂系统各有其优缺点。
主动悬挂系统可以实现更精确的调节,适应性更强,但成本相对较高;而半主动悬挂系统成本更低,适用性更广,但调节精度有所不足。
在实际应用中,需要根据车辆的具体情况和需求选择适合的悬挂控制方法。
综上所述,汽车底盘悬挂系统的主动与半主动控制方法在提升车辆性能和舒适性方面发挥着重要作用。
随着科技的不断发展和进步,相信底盘悬挂系统的控制方法会越来越完善,为驾驶员提供更加安全、舒适的行车体验。
汽车底盘悬挂系统的自适应调校与优化随着汽车工业的不断发展,汽车底盘悬挂系统的自适应调校与优化技术也日益成为了汽车制造业的研究热点之一。
底盘悬挂系统作为汽车的重要部件,直接影响着车辆的操控性、舒适性和安全性。
因此,如何通过自适应调校与优化技术,提升汽车底盘悬挂系统的性能,已经成为了制造商和研发人员共同关注的问题。
一、自适应调校技术自适应调校技术是指汽车底盘悬挂系统能够根据不同的驾驶条件和路况,自动调整悬挂系统的硬度、高度和阻尼等参数,以提升车辆的操控性和舒适性。
这种技术通过传感器实时监测车辆的运行状态,反馈给控制单元,从而实现底盘悬挂系统的智能调节。
1. 传感器监测底盘悬挂系统通过装配在车辆各处的传感器,可以实时获取车辆的速度、转向角、加速度等数据,为自适应调校提供准确的参数。
2. 控制单元反馈传感器采集到的信息会被送往底盘悬挂系统的控制单元,根据实时数据分析车辆的运行状况,并通过调节悬挂硬度、高度和阻尼等参数,实现系统的自适应调校。
二、优化设计除了自适应调校技术外,优化设计也是提升汽车底盘悬挂系统性能的关键。
通过合理的结构设计和材料选用,可以有效提升底盘悬挂系统的稳定性和耐久性。
1. 结构设计优化的结构设计可以提高悬挂系统的刚度和稳定性,使车辆在不同路况下具有更好的操控性和舒适性。
例如,采用多连杆独立悬架设计,可以有效减少车身侧倾,提升车辆的稳定性。
2. 材料选用选用高强度、轻量化的材料,可以减轻底盘悬挂系统的重量,提高车辆的燃油经济性和悬挂系统的响应速度。
同时,耐磨耐腐蚀的材料也能延长悬挂系统的使用寿命。
三、性能优势通过自适应调校和优化设计,汽车底盘悬挂系统能够获得以下性能优势:1. 良好的操控性底盘悬挂系统的自适应调校可以根据不同驾驶条件实时调整悬挂参数,提升车辆的操控性和悬挂系统的响应速度,使驾驶更加稳定舒适。
2. 较高的舒适性优化设计和自适应调校技术的结合,可以有效降低车辆通过颠簸路面时的震动和噪音,提高乘坐舒适度,为驾驶者和乘客带来更好的行车体验。
汽车主动悬架系统及其控制方法汽车乘坐舒适性和操作安全性与汽车主动悬架关系紧密,主动悬架研究及其重要。
本文介绍了主动悬架的工作原理以及主动悬架的控制方法:天棚阻尼控制、最优控制、自适应控制、滑模变结构控制、模糊控制、神经网络控制等。
预测了主动悬架系统的发展和未来趋势。
标签:主动悬架;控制方法;汽车被动悬架通常由具有确定参数的弹性元件和阻尼元件等构成,对于路面的适应性能较差,对汽车改善舒适性等方面不利。
在被动悬架设计的过程中,往往不能使乘客的乘坐舒适性与车辆的操纵稳定性同时达到最优。
在很大程度上及一些因素的影响,我国的汽车很少采用主动悬架,因为在主动及半主动悬架研究方面,我国相对来说比较落后,就技术层面来讲,主动悬架相对于被动悬架在控制方面较为复杂,研究起来比较困难,对其进一步发展产生了阻碍。
1 汽车主动悬架的工作原理汽车主动悬架可以根据路面的实时状况来进行调节,相比于被动悬架其可以调节该悬架的刚度及阻尼,使悬架找到一个最优的状态来满足舒适性及操纵稳定性。
它是在被动悬架的基础上改进而来,增加用来控制调节力的装置,通过控制系统对传遞来的一系列信号进行反馈调节力的大小进而使悬架刚度及阻尼发生变化来使乘坐舒适性及操纵稳定性同时达到最优。
2 主动悬架系统的控制方法主动悬架的控制方法有很多种,在不同的控制方法中所运用的学科知识也不相同,涉及到多种理论的分析研究。
但是,各种控制方法均有自身的独特之处,对几种主动悬架的控制方法介绍如下。
2.1 天棚阻尼器控制天棚阻尼器控制的主要方法是通过一种对力的控制来实现其功能。
该力是由主动悬架发生并且需要与该车的车体的速度成正比例关系,由于在该系统中相比其他系统多了一个固定一端的阻尼器,来作为参考,这就是天棚阻尼控制系统的大致原理和名称由来。
在该控制方法中,控制力的大小是由车体的速度传递到到力传感器的大小决定的,传感器数量不多且结构也不算复杂,更不需要多学科的交叉研究,比较容易实现其功能且使用起来相对快速。
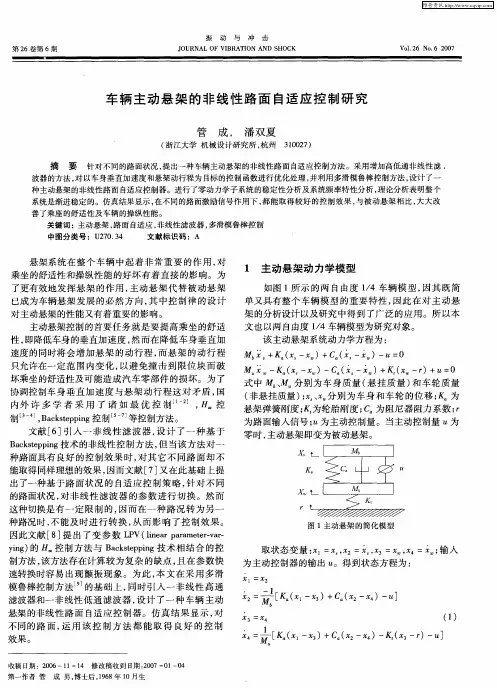
车辆半主动悬架的道路频率自适应控制Le Hoa Nguyen, Keum-Shik Hong*, and Seonghun Park摘要本文是对某型车辆半主动悬架的道路频率自适应控制的研究。
控制的目标是对于所有频率区域的道路干扰均能提高车辆的悬挂性能(平顺性和轮轨关系)。
为了实现这个目标,采用的控制方式来源于传统的天棚阻尼控制,控制器的增益大小由不同的频率区域道路干扰所决定。
通过使用从一个相对位移测量传感器所测的数据,就可以得出一种基于卡尔曼滤波器估计所需的状态变量设计的一个状态估计量。
道路扰动频率德估计使用一阶零交点的算法来得到。
该种控制方法的效率可以通过数据模拟显示得出。
关键词:汽车悬架最低标准相对位移传感器相应的道路频率1.简介悬架系统是设计用来支持车体的重量,以隔离车辆底盘免除道路干扰,保持良好的车轮和道路的接触关系。
悬架系统可以分为主动,半主动和被动悬架三类。
每种悬架方式都有各自的优缺点。
被动悬架构造简单,便于运用。
然而,它只能使车辆的运行性能在有限的频率范围内保持稳定,而车辆运行过程中的频率范围很广。
与被动悬架相比,主动悬架可以使车辆的运行性能在很广的频率范围内保持稳定。
因此,有很多的研究人员来研究这一块[1,3,11-18]。
然而,全主动悬架系统的缺点是构造比较复杂,制造成本较高,消耗的能量较多。
半主动悬架系统配备了可调阻尼器(可变孔或磁流变阻尼器),这样就可以生成一系列不同的阻尼力作为控制力的输入。
因此半主动悬架的成本和重量比主动悬架系统节省得多。
此外,采用半主动悬架控制方式相比较主动悬架方式其系统的性能稳定多了,其维护的可行性比被动悬架也可行多了。
这些优势使半主动悬架系统已经广泛应用与商业车辆了[4-10]。
悬架系统的性能是由行驶舒适性和车轮与地面的接触性能来评定的。
提高行驶舒适品质,最重要的是使车体运行时的频率隔离于路上干扰在人类敏感频率范围,根据ISO 2631-1 [3]标准其范围大致是在4-8 Hz。
汽车悬挂系统的主动控制研究随着汽车工业的不断发展,汽车悬挂系统的研究和改进也成为了汽车工程领域的热门话题之一。
汽车悬挂系统对于汽车行驶性能、舒适性以及安全性都起着至关重要的作用,因此如何通过主动控制技术来提高汽车悬挂系统的性能已经成为一个备受关注的话题。
本文将重点探讨汽车悬挂系统的主动控制研究,并对该领域的发展现状和未来趋势进行分析。
1. 汽车悬挂系统的作用和结构汽车悬挂系统是汽车的重要组成部分之一,它对汽车的行驶性能、舒适性以及安全性都有着直接影响。
汽车悬挂系统的主要作用包括:1)吸收和减震道路不平时所产生的冲击力,保证车辆的稳定性和舒适性;2)保持车身与车轮之间的合适位置关系,确保车辆在颠簸道路上有良好的抓地力和操控性。
汽车悬挂系统通常由减震器、弹簧、控制臂、横向稳定杆等组成。
其中减震器主要用于减少车身的颠簸和摇晃,弹簧则用于支撑车身重量并保持车身姿态,而控制臂和横向稳定杆则用于控制车轮和车身的运动,从而提高车辆的操控性能和稳定性。
2. 汽车悬挂系统的主动控制技术主动悬挂系统是指利用先进的传感器、执行器和控制系统来感知、分析和响应道路和车辆状态变化,从而及时调节悬挂系统的工作状态和性能。
通过主动悬挂系统,可以实现对车辆悬挂系统的实时控制,以提高车辆的行驶性能、舒适性和安全性。
主动悬挂系统的主要技术包括主动减震控制、主动悬架高度控制、主动抗侧倾控制等。
其中主动减震控制是目前应用最为广泛的一种主动悬挂技术,它通过感知车辆的速度、加速度、横向加速度、车身姿态等参数,并根据这些参数实时调节减震器的阻尼力,从而实现对车辆行驶过程中的颠簸和摇晃的抑制,提高车辆的舒适性和操控性。
目前,各大汽车厂商和研究机构都在积极开展汽车悬挂系统的主动控制研究。
主动减震控制技术已经在一些高端汽车上得到了应用,如奔驰的ABC主动悬挂系统、宝马的EDC主动减震系统等。
这些系统都采用了先进的传感器、控制器以及可调节减震器来实现对车辆悬挂系统的主动控制,从而提高了车辆的操控性能和舒适性。
浅析汽车底盘主动悬架控制方法汽车底盘主动悬架控制方法是指通过车辆底盘上安装的各种传感器、执行器以及控制器等装置,实时监测和调整车辆底盘的悬架系统,以提高车辆的稳定性、舒适性、操控性和安全性。
主动悬架控制方法可以根据行驶条件和驾驶者的意图对车辆底盘悬架系统进行主动调整,提升整车性能。
主动悬架控制技术的发展已经成为汽车行业的一项重要趋势,对提高车辆的性能和驾驶体验起到了积极的作用。
本文将从技术原理、控制方法以及应用前景三个方面对汽车底盘主动悬架控制方法进行浅析。
一、技术原理汽车底盘主动悬架控制方法的技术原理是通过悬架系统上安装的传感器和执行器实时监测路面状况、车速、车辆操控状态等参数,然后通过控制器对悬架系统进行主动调整,使车辆在不同的行驶条件下都能保持最佳的悬架性能。
悬架系统是汽车底盘中的一个重要组成部分,其主要作用是支撑车身、减震减振、保证车辆在行驶过程中的稳定性和舒适性。
在传统的车辆悬架系统中,悬架的调整需要依靠车辆本身的重力或者弹簧的弹性来完成,对悬架系统的调整能力有一定的局限性。
而主动悬架控制方法则通过装配在车辆悬架系统上的传感器和执行器实时监测路面情况、车速、车辆操控状态等参数,结合控制器对悬架系统进行实时调整,可以实现更加精准的悬架调整,提高车辆的行驶稳定性和舒适性。
二、控制方法汽车底盘主动悬架控制方法主要包括悬架系统的主动调整和车辆动态控制两个方面。
在悬架系统的主动调整方面,主要通过调整悬架系统的硬度、高度以及减振力等参数来适应不同的路面情况和车速条件。
对于动态控制方面,则是通过控制车辆的动力系统和制动系统,来实现对车辆的动态稳定性控制。
具体来说,可以通过调整车辆的电子稳定控制系统(ESP)、防抱死制动系统(ABS)、牵引力控制系统(TCS)等,实现车辆操控的优化。
在车辆动态控制方面,则是通过车辆的动力系统和制动系统来实现对车辆的动态稳定控制。
比如在高速行驶时,通过调整车辆的动力输出和刹车力分配来提高车辆的行驶稳定性;在急转弯时,通过调整车轮的转速来实现对车辆的横向稳定控制等。
汽车转向与主动悬架集成系统的D-LMS控制
付丽峰;彭衍峰
【期刊名称】《黑龙江交通科技》
【年(卷),期】2007(030)011
【摘要】以提高汽车行驶平顺性、操纵稳定性和安全性为目点,建立了半车三自由度汽车转向与主动悬架的综合模型,采用基于小波理论的最小均方(LMS)算法对转向与主动悬架集成系统进行控制.计算结果表明,采用LMS控制的转向与主动悬架集成系统使汽车行驶平顺性和操纵稳定性比被动系统明显改善,有效地提高了汽车综合性能;同时LMS能自动调整权系数,且控制算法简单,便于工程应用.
【总页数】3页(P88-90)
【作者】付丽峰;彭衍峰
【作者单位】黑龙江省道路运输管理局;黑龙江省交通征费局哈尔滨一所
【正文语种】中文
【中图分类】U461
【相关文献】
1.车辆防抱制动系统与主动悬架系统集成协调控制算法的仿真 [J], 王其东;宋宜亮
2.汽车电动助力转向系统、防抱死系统与主动悬架集成控制 [J], 马国宸;宋小文;王耘;胡树根
3.考虑侧倾的半主动悬架与电子稳定控制系统集成控制 [J], 张亮修;杨家颖;吴光强
4.基于干扰抑制的汽车转向与悬架系统的集成控制 [J], 陈无畏;孙启启;胡延平;朱茂飞
5.基于预测控制的汽车主动悬架与电控液压助力转向系统的集成控制 [J], 高翔;缪丰隆
因版权原因,仅展示原文概要,查看原文内容请购买。
车辆悬架系统的自适应模糊控制Khan Laiq;Umair Khan M【期刊名称】《中国科学技术大学学报》【年(卷),期】2012(042)009【摘要】悬架是用来支持车身的系统,通过隔离道路干扰使得乘客感觉舒适、并确保车辆稳定.为此研究了全车模型悬架系统在下列几种控制方式下的性能:被动控制、半主动控制、自适应标准可加性模型(SAM)下的主动控制.全车模型可以为车辆悬架系统提供一些必要的性能参数,如车身偏移、车轮偏移和悬架偏斜.乘坐的舒适性和车辆的操控性决定了所需悬架系统的性能.乘坐的舒适性取决于车身偏移和乘客座位的偏移,而车辆的稳定由其他自由度(如俯仰和滚转)决定.半主动和主动悬架控制的设计通过MATLAB/SIMULINK加以实现,充分考虑了不规则的路面,并以此验证半主动控制和SAM主动控制的性能.实验结果表明,SAM主动控制能够改善乘坐的舒适性和车辆的操控性.%The suspension system aims to support vehicle's body.It provides passenger comfort and vehicle's stability by isolating road disturbances.This paper aims to examine the performances of the full-car model suspension system using passive,semi-active and adaptive standard additive model (SAM) active control.The full-car model can provide necessary performance parameters of vehicle suspension such as body displacement,wheel displacement and suspension deflection.Ride comfort and vehicle handling determines the performance of the suspension system.Ride comfort can be determined by vehicle's body displacement and passenger seat displacement,while vehicle stability can be determinedby other degrees of freedom (DoF) like pitch and roll.Irregular road surfaces are taken into account to check the performances of semi-active control and SAM active control.Design of semi-active and active suspension control is implemented in MATLAB/SIMULINK.Results show that rider comfort and vehicle handling can be improved with SAM active control.【总页数】10页(P689-698)【作者】Khan Laiq;Umair Khan M【作者单位】COMSATS信息技术学院电子工程系,阿伯塔巴德22010,巴基斯坦;COMSATS信息技术学院电子工程系,阿伯塔巴德22010,巴基斯坦【正文语种】中文【中图分类】TP27【相关文献】1.车辆悬架的半主动自适应模糊控制方法研究 [J], 陈龙;崔晓利;李德超2.车辆半主动悬架自适应模糊控制器设计与仿真 [J], 陈龙;李德超3.自适应模糊控制车辆悬架系统试验 [J], 舒歌群;孙建民4.车辆主动悬架的LMS自适应模糊控制 [J], 孙建民;杨清梅5.车辆半主动悬架自适应模糊控制 [J], 陈龙;李德超;薛念文;周孔亢因版权原因,仅展示原文概要,查看原文内容请购买。