结构力学 超静定结构的位移计算
- 格式:pptx
- 大小:193.90 KB
- 文档页数:12

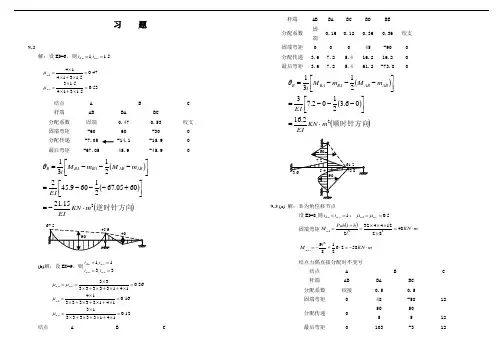
习 题9-2解:设EI=6,则5.1,1==BC AB i i 53.05.13145.1347.05.131414=⨯+⨯⨯==⨯+⨯⨯=BC BA μμ结点 A BC 杆端 AB BA BC 分配系数 固端 0.47 0.53 绞支 固端弯矩 -60 60 -30 0 分配传递 -7.05 -14.1 -15.9 0 最后弯矩-67.0545.9-45.9()()()逆时针方向215.216005.6721609.4522131m KN EI EI m M m M i AB AB BA BA B ⋅-=⎥⎦⎤⎢⎣⎡+---=⎥⎦⎤⎢⎣⎡---=θ(b)解:设EI=9,则3,31,1====BE BD BC AB i i i i12.0141333331316.0141333331436.01413333333=⨯+⨯+⨯+⨯⨯==⨯+⨯+⨯+⨯⨯==⨯+⨯+⨯+⨯⨯==BC BA BE BD μμμμ结点 A BC杆端 AB BA BC BD BE 分配系数 固端 0.16 0.12 0.36 0.36 绞支 固端弯矩0 45 -90 0 分配传递 3.6 7.2 5.4 16.216.20 最后弯矩 3.6 7.25.461.2 -73.8()()()顺时针方向22.1606.32102.732131m KN EI EI m M m M i AB AB BA BA B ⋅=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡---=θ9-3 (a) 解:B为角位移节点设EI=8,则1==BC AB i i ,5.0==BC BA μμ 固端弯矩()m KN l b l Pab M BA ⋅=⨯⨯⨯⨯=+=4882124432222 m KN l M BC ⋅-=⋅+-=582621892 结点力偶直接分配时不变号结点 A BC 杆端 AB BA BC 分配系数 铰接 0.5 0.5 固端弯矩 0 48 -58 12 分配传递0 50 50 5 5 12 最后弯矩103-312(b) 解:存在B 、C 角位移结点设EI=6,则1===CD BC AB i i i73741413145.0141414==⨯+⨯⨯==⨯+⨯⨯==BC CB BC BA μμμμ固端弯矩:mKN M M M m KN M m KN M CDCB BC BA AB ⋅-=⨯+⨯-===⋅-=⋅-=14021808640080802结点 A BC杆端 AB BA BC CB CD 分配系数 固结 0.5 0.5 4/7 3/7 固端弯矩-80 80 0 0 -140 分配传递-20 -40 -40 -2047.5 91.4 68.6 -11.4 -22.8 -22.8 -11.4 3.25 6.5 4.9 -0.82-1.63-1.63-0.820.6 0.45 最后弯矩-112.2215.57-15.4866.28-66.05(c) 解:B 、C 为角位移结点51411,5441454414,51411=+==+==+==+=CD CBBC BA μμμμ固端弯矩:mKN M mKN M mKN M mKN M mKN M mKN M DC CD CB BC BA AB ⋅-=⨯-=⋅-=⨯-=⋅=⨯=⋅-=⨯-=⋅=⨯=⋅=⨯=10065242003524501252450125241283424646424222222结点 A BCD 杆端 AB BA BC CB CD 滑动 分配系数 滑动 0.2 0.8 0.8 0.2 -100固端弯矩64 128 -50 50 -200 分配传递15.6 -15.6 -62.4 -31.272.48 144.96 36.24 -36.24 14.5 -14.5 -58 -29 11.6 23.2 5.8 -5.8 2.32-2.32-9.28-4.643.7 0.93 -0.93 最后弯矩96.4295.58-95.6157.02-157.03-142.9796.42(d) 解:11313141413114131414145.0141414=⨯+⨯+⨯⨯===⨯+⨯+⨯⨯===⨯+⨯⨯=DBDE DCCD CA μμμμμ 固端弯矩:mKN M mKN M ED DE ⋅=⋅-=⨯-=383812422 结点 A CD E 杆端 AC CA CD DC DB DE ED 分配系数 固结 0.5 0.5 4/11 3/11 4/11 固结 固端弯矩0 0 0 0 0 -2.67 2.67 分配传递-5 -10 -10 -546/33 92/33 69/33 92/33 46/33 -0.35 - 23/33- 23/33-0.35 0.127 0.096 0.127 0.064 最后弯矩-5.35-10.7-9.3-2.442.190.254.12(e) 解:当D 发生单位转角时:()()2414-=⨯⨯=m EI K Y C 则())假设12(441==⨯=-m EI EIM DC73,74,3716,379,371216,12,16,9,12=====∴=====∴EB ED DE DA DC DE EB DE DA DC S S S S S μμμμμ 结点D EB 杆端 DC DA DE ED EB BE 分配系数 12/37 9/37 16/37 4/7 3/7 固结 固端弯矩0 0 -9 9 0 0 分配传递-2.57 -5.14 -3.86 -1.93 3.75 2.81 5 -2.5 -0.72 -1.43 -1.07 -0.54 0.230.18 0.31 0.16 最后弯矩3.982.99-6.985-5-2.47(f) 解:截取对称结构为研究对象。
位移法求解超静定结构一、引言超静定结构是指在静力学条件下,其内力和位移无法通过平衡方程和变形方程求解的结构。
由于超静定结构的内力和位移无法直接求解,因此需要采用特殊的方法进行计算。
其中,位移法是一种经典的求解超静定结构的方法。
二、位移法基本原理位移法是一种基于能量原理的方法,其基本思想是将结构中各个部分的变形看作独立自由度,然后通过能量平衡原理得到各个自由度之间的关系,最终求解出整个结构的内力和位移。
具体来说,位移法包括以下几个步骤:1. 将超静定结构中每一个部分看作一个独立自由度,并为每个自由度引入一个未知位移;2. 根据平衡条件列出各部分之间相互制约的方程组;3. 根据能量平衡原理列出总势能和总应变能之间的关系式,并将其转化为未知位移之间的关系式;4. 将各个方程组联立起来,得到未知位移之间的关系式;5. 利用已知边界条件解出未知位移,并进而求解出整个结构的内力和位移。
三、位移法的应用范围位移法适用于各种类型的超静定结构,包括梁、柱、框架等。
此外,位移法还可以用于求解复杂的结构体系,如悬索桥、拱桥等。
四、位移法的优点和缺点1. 优点:(1)能够求解各种类型的超静定结构;(2)计算精度高,适用于复杂结构;(3)计算过程简单明了,易于理解和掌握。
2. 缺点:(1)只能求解超静定结构,不能求解不静定和半静定结构;(2)需要将每个部分看作独立自由度,因此对于复杂结构需要引入大量自由度,计算量较大;(3)需要具备一定的数学基础和结构力学知识。
五、位移法的实例以一根简支梁为例进行说明。
假设梁长为L,截面为矩形截面,宽度为b,高度为h。
在中间加一集中荷载F,则该梁为超静定结构。
采用位移法进行求解:1. 将梁分成两段,并引入两个未知位移u1和u2;2. 根据平衡条件,得到以下方程组:(1)在x=0处:F = R1 + R2(2)在x=L处:R1u1 + R2u2 = FL/43. 根据能量平衡原理,得到以下关系式:(1)总势能:V = (R1u1 + R2u2)hL/2(2)总应变能:T = F^2L^3/48EI4. 将以上方程组和关系式联立起来,得到:(1)F = (3EI/h^3L^3)(u1 - u2)(2)R1 = F/2 - EI/h^3L^3(u1 + u2)(3)R2 = F/2 + EI/h^3L^3(u1 + u2)5. 利用已知边界条件,即梁两端的位移为0,解出未知位移:(1)u1 = FL^3/(48EIh);(2)u2 = -FL^3/(48EIh);6. 最终求解出内力和位移:(1)R1 = F/4;(2)R2 = F/4;(3)Mmax = FL/8;(4)umax = FL^3/(48EIh)。
第七章 结构位移计算到上节课为止,我们把五种静定杆件结构的计算问题全讨论过了。
我们知道内力计算问题属强度问题→是结力讨论的首要任务。
讲第一章时,结力的第二大任务:刚度问题,而要解决…,首先应该…杆件结构位移计算 (结构变形+刚度位移)→{刚度校核截面设计确定P max又是超静定结构计算的基础(双重作用)。
另外本章主要讨论各种杆件结构的位移计算问题。
结构位移计算的依据是虚功原理,所以本章先讨论刚体、变形体的虚功原理,然后推导出杆件结构位移计算的一般公式,再讨论各种具体结构的位移计算。
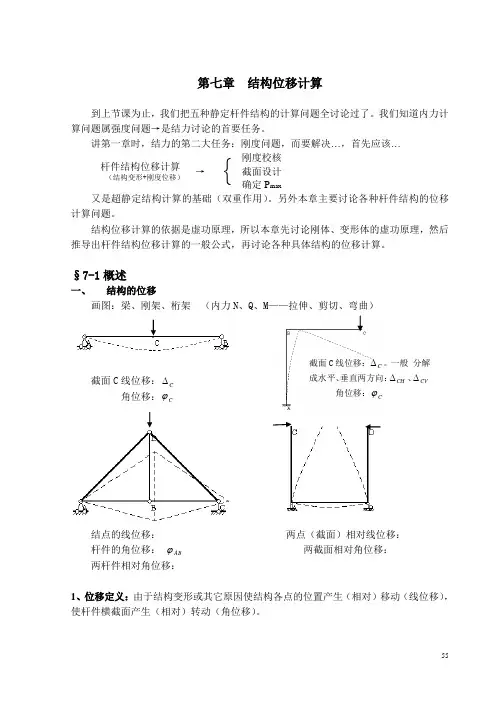
§7-1概述一、结构的位移画图:梁、刚架、桁架 (内力N 、Q 、M ——拉伸、剪切、弯曲)截面C 线位移:C ∆ 角位移:C ϕ结点的线位移: 两点(截面)相对线位移: 杆件的角位移: AB ϕ 两截面相对角位移: 两杆件相对角位移:1、位移定义:由于结构变形或其它原因使结构各点的位置产生(相对)移动(线位移),使杆件横截面产生(相对)转动(角位移)。
截面C 线位移:C ∆。
一般 分解成水平、垂直两方向:CH ∆、CV ∆ 角位移:C ϕ2、位移的分类:6种绝对位移:点(截面)线位移——分解成水平、垂直两方向截面角位移:杆件角位移:相对位移:两点(截面)相对线位移——沿连线方向两截面相对角位移:两杆件相对角位移:统称为:广义位移:角、线位移;相对、绝对位移Δki:k:产生位移的方向;i:引起位移原因。
如ΔA P、Δat、ΔA C广义力:集中力、力偶、分布荷载,也可以是上述各种力的综合二、引起位移的原因1、荷载作用:(荷载→内力→变形→位移)2、温度改变:静定结构,温度改变,→0应力非0应变→结构变形(材料胀缩引起的位移性质同)3、支座移动;(无应力,无应变,但几何位置发生变化){刚体位移(制造误差同)变形位移三、计算位移的目的1)刚度验算:最大挠度的限制(框架结构弹性层间位移限值1/450)2)为超静定结构的弹性分析打下基础3)预先知道变形后的位置,以便作出一定的施工措施:(起重机吊梁、板)(屋架安装)(建筑起拱)(屋窗、门、过梁)(结构要求高,精密)四、计算位移的有关假定(简化计算)1)弹性假设2)小变形假设建立平衡、应变与位移、位移与荷载成线性关系3)理想约束(联结,不考虑阻力摩擦)变形体系{ 线性变形体系(线弹性体系)荷载和位移呈线性关系,且荷载全撤除后位移将全部消失,无残余变形,(可用位移叠加原理)非线形变形体系(分段线形叠加)4)位移叠加原理(类似内力、反力叠加)§7-2 变形体系的虚功原理一、 位移实位移:外因作用下结构实际位移虚位移:根据解题需要,虚设位移状态 (满足变形协调+边界条件) 统称为:广义位移二、功:力所做的功:该力大小乘以力方向上的相应位移常力的功: T =P ×Δ=P ×D ×cos a (大小、方向、作用点不变) 变力的功:T=⎰s dT =⎰s P ×cos (P ,d s )×d s力偶所做的功:功两要素:力与位移P :广义力(力、力偶、相对力、相对力偶)Δ:和广义力相对应的广义位移(线、角、相对线、相对角)注意:在定义功T 时,没有说位移Δ是由力P 引起的,可能由P 或其它原因,但P 力照样作功。

第五章 超静定结构计算——位移法一、判断题:1、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI2EI EIEIEIEA EA ab EI=EI=EI=244422、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
3、位移法未知量的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静定的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
6、图示结构,当支座B 发生沉降∆时,支座B 处梁截面的转角大小为12./∆l ,方向为顺时针方向,设EI =常数。
7、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
/2/22l l θθC8、图示梁之EI =常数,固定端A 发生顺时针方向之角位移θ,由此引起铰支端B 之转角(以顺时针方向为正)是-θ/2 。
9、用位移法可求得图示梁B 端的竖向位移为ql E I 324/。
ql二、计算题:10、用位移法计算图示结构并作M 图,各杆线刚度均为i ,各杆长均为 l 。
11、用位移法计算图示结构并作M 图,各杆长均为 l ,线刚度均为i 。
12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度 i 相同。
q 213、用位移法计算图示结构并作M 图。
E I =常数。
ll /2l /2第四章 超静定结构计算——力法一、判断题:1、判断下列结构的超静定次数。
(1)、 (2)、(a )(b)(3)、 (4)、(5)、 (6)、(7)、(a)(b)2、力法典型方程的实质是超静定结构的平衡条件。
3、超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
4、在温度变化、支座移动因素作用下,静定与超静定结构都有内力。
5、图a 结构,取图b 为力法基本结构,则其力法方程为δ111X c =。
(a)(b)X1第二章 静定结构内力计算一、判断题:1、静定结构的全部内力及反力,只根据平衡条件求得,且解答是唯一的。