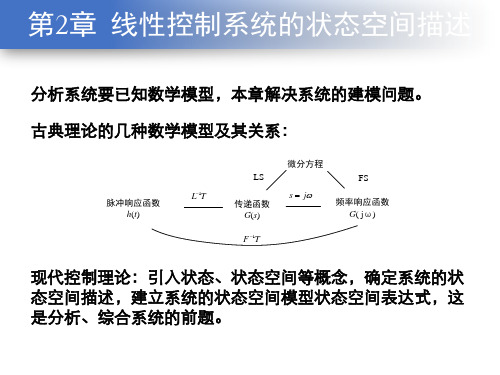
现代控制理论-空间模型
- 格式:ppt
- 大小:2.13 MB
- 文档页数:19














《现代控制理论》习题第一章 控制系统的状态空间模型1.1 考虑以下系统的传递函数:656)()(2+++=s s s s U s Y试求该系统状态空间表达式的能控标准形和可观测标准形。
1.2 考虑下列单输入单输出系统:u y y yy 66116=+++试求该系统状态空间表达式的对角线标准形。
1.3 考虑由下式定义的系统:Cxy Bu Ax x=+=式中]11[,213421=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=C B A ,--试将该系统的状态空间表达式变换为能控标准形。
1.4 考虑由下式定义的系统:Cxy Bu Ax x=+=式中]011[,10030021101=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=C B A ,--试求其传递函数Y(s)/U(s)。
1.5 考虑下列矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0001100001000010A试求矩阵A 的特征值λ1,λ2,λ3 和λ4。
再求变换矩阵P ,使得),,,(diag 43211λλλλ=-AP P第二章 状态方程的解2.1 用三种方法计算下列矩阵A 的矩阵指数函数At e 。
1) ⎥⎦⎤⎢⎣⎡--=5160A; 2) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6116100010A2.2 计算下列矩阵的矩阵指数函数At e 。
1) ⎥⎦⎤⎢⎣⎡=0010A ; 2) ⎥⎦⎤⎢⎣⎡=1002--A ; 3) ⎥⎦⎤⎢⎣⎡-=0110A ; 4) ⎥⎦⎤⎢⎣⎡=1021A5) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=200010011A ; 6) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=210010001A ; 7) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=000100010A2.2 给定线性定常系统Ax x=式中⎥⎦⎤⎢⎣⎡--=2310A且初始条件为⎥⎦⎤⎢⎣⎡-=11)0(x试求该齐次状态方程的解x (t )。
2.4 已知系统方程如下[]xy u x x 11015610-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=求输入和初值为以下值时的状态响应和输出响应。

