第三节 控制系统的传递函数
- 格式:ppt
- 大小:229.50 KB
- 文档页数:21
pi控制传递函数Pi控制器是一种广泛使用于工业控制系统中的有线反馈控制器,它可以对系统进行实时的调节和反馈,以确保系统能够在给定条件下稳定地工作。
Pi控制传递函数描述了这种控制器的运行方式和效果,它是Pi控制系统设计的基础,我们在设计控制系统时需要详细了解和研究它。
下面,我们将围绕“Pi控制传递函数”来为大家详细介绍如何设计和运用Pi控制器。
第一步,建立系统的数学模型。
首先,对于要进行控制的系统,我们需要建立其数学模型。
这个模型通常是一个微分方程,它可以描述系统的运行方式和响应。
这个方程是我们后面进行控制设计的基础。
通常,模型越精确,我们在设计控制器时就能更好地预计实际效果。
第二步,设计Pi控制器。
Pi控制器通常是由比例控制器和积分控制器两个部分组成。
其中,比例控制器通常可以很容易地被设计出来,而积分控制器则需要更加深入的研究和设计。
第三步,定义Pi控制传递函数。
一旦我们确定了Pi控制器的设计,我们就可以开始考虑Pi控制传递函数的设计了。
Pi控制传递函数是一个描述控制器工作效果的函数,它可以帮助我们预测系统的响应和稳态性能。
通常,我们希望Pi控制传递函数能够尽可能地接近理想传递函数,或者说,他们之间的差异越小越好。
第四步,优化Pi控制传递函数。
一旦我们确定了Pi控制传递函数的初步设计,我们就可以开始针对它进行优化了。
优化的目的是希望Pi控制器能够在实际应用中达到最佳效果。
优化的手段通常有两种:一种是通过经验进行调整;另一种则是通过仿真来验证和调整。
第五步,实际应用Pi控制器。
最后一步就是将Pi控制器投入实际应用中了。
在实际应用过程中,我们需要不断地对Pi控制器的参数和工作效果进行监控和调整,以确保它能够在各种工况下都有良好的控制效果和稳态性能。
同时,在应用中我们还需要考虑到工程实际的可行性、可靠性与稳定性等因素。
综上所述,Pi控制传递函数是Pi控制系统设计的基础,我们需要在设计控制系统时仔细研究和评估它。
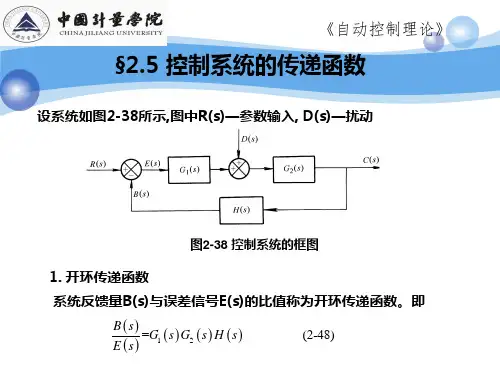
控制系统的传递函数考虑扰动的闭环控制系统X i (s )到X o (s )的信号传递通路称为前向通道;X o (s )到B (s )的信号传递通路称为反馈通道;1.闭环系统的开环传递函数将闭环控制系统主反馈通道的输出断开,即H (s )的输出通道断开,此时,前向通道传递函数与反馈通道传递函数的乘积G 1(s )G 2(s )H (s )称为该 闭环控制系统的开环传递函数。
记为G K (s )。
闭环系统的开环传递函数也可定义为反馈信号B (s )和偏差信号ε (s )之间的传递函数,即:2..x i (t )作用下系统的闭环传递函数令n (t )=0,此时在输入x i (t )作用下系统的闭环传递函数为:输入作用下系统的偏差传递函数 令n (t )=0,此时系统输入X i (s )与偏差ε (s )之间的传递函数称为输入作用下的偏差传递函数。
用)(s i εΦ表示。
3.n (t )作用下系统的闭环传递函数令x i (t )=0,此时在扰动n (t )作用下系统的闭环传递函数(干扰传递函数)为:扰动作用下系统的偏差传递函数,令x i (t )=0,此时系统在扰动作用下的偏差传递函数(称扰动偏差传递函数)。
)()()(1)()()()()(212101s H s G s G s G s G s X s X s i i +==Φ)()()(11)()()(21s H s G s G s X s s i i i +==Φεε)()()(1)()()()(21202s H s G s G s G s N s X s N +==Φ)()()(1)()()()()(212s H s G s G s H s G s N s s N N +-==Φεε。