2.4g 状态空间模型的线性变换和约旦规范形
- 格式:ppt
- 大小:1.11 MB
- 文档页数:79
时变高斯过程状态空间模型时变高斯过程状态空间模型是一种用于描述随机过程的数学模型,它在许多领域中被广泛应用,包括信号处理、金融、经济学等。
本文将介绍时变高斯过程状态空间模型的基本概念、特点和应用。
一、基本概念时变高斯过程是一种连续时间、连续状态的随机过程,其状态变量服从高斯分布。
状态空间模型是一种用于描述随机过程的模型,其中包括状态方程和观测方程。
时变高斯过程状态空间模型将状态方程和观测方程结合起来,用于描述系统的动态变化和观测结果之间的关系。
在时变高斯过程状态空间模型中,状态方程描述了系统的演化规律,观测方程描述了观测结果与系统状态之间的关系。
状态方程通常采用线性动态方程来描述,而观测方程可以是线性方程或非线性方程,具体取决于系统的性质和应用需求。
二、特点1. 高斯性:时变高斯过程状态空间模型中的状态变量服从高斯分布,这使得模型具有较好的数学性质和分析能力。
高斯分布的特点使得可以通过状态观测数据来估计系统的状态,并进行预测和推断分析。
2. 线性性:状态方程通常采用线性动态方程来描述,观测方程可以是线性方程或非线性方程。
线性性质使得模型的分析和求解相对简单,可以利用线性系统理论和方程求解方法来进行模型分析和推导。
3. 随机性:时变高斯过程状态空间模型是一种随机过程模型,其中包含随机噪声项,用于描述系统的不确定性和随机性。
随机噪声项可以从观测数据中估计,并用于状态估计和预测分析。
三、应用时变高斯过程状态空间模型在许多领域中被广泛应用,以下列举几个典型的应用领域。
1. 信号处理:时变高斯过程状态空间模型可以用于对信号进行建模和分析,例如语音信号处理、图像处理等。
通过对信号进行状态估计和预测,可以提取信号的特征和信息,实现信号处理和分析的目的。
2. 金融:时变高斯过程状态空间模型可以用于金融市场的预测和分析,例如股票价格的预测、风险管理等。
通过对金融市场的状态进行估计和预测,可以提供决策依据和风险控制策略。
《现代控制理论》MOOC课程1.3状态向量的线性变换三. 状态空间表达式的对角规范型和约当规范型1.3状态向量的线性变换特征根的代数重数和几何重数设λi 为系统矩阵A 的特征值,若λi 的重根数为,则称的代数重数为。
σi σi λi 设V 为n 维线性空间,为系统矩阵A 的特征值,则的特征子空间λi λi V λi ={p i ∈V|Ap i =λi p i }的维数αi , 称为λi 特征值的几何重数。
αi =n −rank(λi I −A )的几何重数也就是线性无关特征向量的个数。
λi λi αi三. 状态空间表达式的对角规范型和约当规范型1.3状态向量的线性变换解:A =12332300−1例:求系统矩阵相异特征值的代数重数和几何重数。
=(λ+1)2(λ−4)=0λI −A =λ−1−2−3−3λ−2−300λ+1可得:λ1=−1,−1λ2=4故的代数重数分别为λ1、λ2σ1=2、σ2=1的几何重数λ1α1=3−rank (λ1I −A )=3−rank −2−2−3−3−3−3000=3−2=1的几何重数λ2α2=3−rank (λ2I −A )=3−rank 3−2−3−32−3004=3−2=11.3状态向量的线性变换三. 状态空间表达式的对角规范型和约当规范型系统的广义特征向量p iλi k对于n×n维矩阵A,若存在一个不为零的n维向量和一个标量,为正整数,使得:൝(A−λi I)k p i=0(A−λi I)k−1p i≠0成立,则称p i为矩阵A的特征值λi所对应的k级广义特征向量。
约当规范型对于给定的n维线性定常系统x=Ax+Bu。
设系统的特征值为:z=Q−1AQz+Q−1Bu=J1⋱J lz+ഥB uλ1(σ1α1代数重,几何重),λ2(σ2α2代数重,几何重),⋯,λl(σlαl代数重,几何重) (σ1+ σ2+⋯+σl=n),则存在由各特征值的广义特征向量组成的变换阵Q,通过变换,可将状态方程化为如下的约当规范型:z=Q−1x其中,ഥA=Q−1AQ=J1⋱J l,ഥB=Q−1Bz =J 1⋱J i⋱J lz +ഥBu J i =J i1⋱J ik⋱J iαiJ ik =λi1λi⋱⋱1λir i1+ r i2+⋯+r iαi =σi特征值对应的约当块矩阵由个约当子块矩阵组成。
![地大《现代控制理论》在线作业二[60467]](https://uimg.taocdn.com/e1976da4b307e87100f6969d.webp)
地大《现代控制理论》在线作业二
一、单选题
1.保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定称为()。
A.能控性
B.能观性
C.系统镇定
D.稳定性
答案:C
2.对于能控能观的线性定常连续系统,采用静态输出反馈闭环系统的状态()。
A.能控且能观
B.能观
C.能控
D.以上三种都有可能
答案:A
3.对于同一个系统,可有()个状态空间表达式。
A.1个
B.2个
C.3个
D.无穷多个
答案:D
4.由状态空间模型导出的传递函数()。
A.惟一
B.不惟一
C.无法判断
D.皆有可能
答案:A
5.维数和受控系统维数相同的观测器为()。
A.降维观测器
B.全维观测器
C.同维观测器
D.以上均不正确
答案:B
6.根据线性二次型最优控制问题设计的最优控制系统一定是()的。
A.渐近稳定
B.稳定
C.一致稳定
D.一致渐近稳定
答案:A
7.下列语句中,正确的是()。
A.系统状态空间实现中选取状态变量是唯一的,其状态变量的个数也是唯一的
B.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数也不是唯一的。
Jordan标准形⼀、引⼊ 前⾯已经指出,⼀切n阶矩阵A可以分成许多相似类。
今要在与A相似的全体矩阵中,找出⼀个较简单的矩阵来作为相似类的标准形。
当然以对⾓矩阵作为标准形最好,可惜不是每⼀个矩阵都能与对⾓矩阵相似。
因此,急需引⼊⼀种较为简单⽽且对于⼀般矩阵都可由相似变换得到。
当矩阵A能相似于某对⾓矩阵时,该对⾓矩阵就是A的⼀个Jordan形。
⽽当矩阵A不能相似于对⾓矩阵时,它必然与⼀个⾮对⾓的Jordan 形相似。
此时的Jordan形J与对⾓矩阵的差别也只是在主对⾓线元素的上邻位有某些元素为1.在这个意义上,Jordan标准型可以说是与A相似的矩阵中最简单的了。
Jordan标准型应⽤⼴泛。
如果能够得到⼀个线性变换或者线性变换矩阵,那么我们可以迅速地得到线性微分⽅程组,特征多项式等。
⼆、定义 设T是复数域C上的线性空间Vn的线性变换,任取Vn上⼀个基,T在该基下的矩阵是A,T(或A)的特征多项式可分解因式为 φ(λ)=(λ-λ1)m1(λ-λ2)m2...(λ-λt)mt m1+m2+...+mt=n 则Vn可分解成不变⼦空间的直和 Vn=N1直和N2直和...Nt 其中Nt=(x|(T-λiTi)mi=0,x属于Vn)是线性变换T-λiTi的核⼦空间。
(有点看不清) 举个例⼦: 特征多项式为φ(λ)=(λ+1)2(λ-5) 则Jordan标准型为 -1 1 或 5 -1 -1 1 5 -1三、简单的结论(1)对于给定的矩阵A,在不计各Jordan块排列次序的意义下,A的Jordan标准型是唯⼀的。
(2)⽅阵A的Jordan标准型J是上三⾓矩阵,其主对⾓线上元素恰好是A的全部特征值。
(3)对⾓矩阵本社是Jordan形,它的每个对⾓元都是⼀个⼀阶的Jordan块。
四、定理(1)两个同阶⽅阵相似的充要条件是它们的Jordan形⼀致。
(忽略排序因素)(2)矩阵A能与对⾓矩阵相似的充要条件是它的初等因⼦全为⼀次式。
![高等代数第7章线性变换[1]](https://uimg.taocdn.com/40b56d3f580216fc700afd3f.webp)
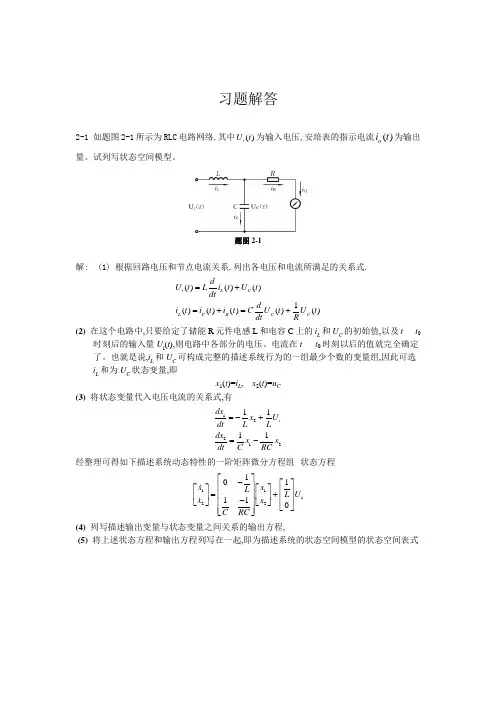
习题解答2-1 如题图2-1所示为RLC 电路网络,其中()i U t 为输入电压,安培表的指示电流)(t i o 为输出量。
试列写状态空间模型。
题图2-1解: (1) 根据回路电压和节点电流关系,列出各电压和电流所满足的关系式.()()()1()()()()()i L C L C R C C dU t Li t U t dtd i t i t i t C U t U t dt R=+=+=+(2) 在这个电路中,只要给定了储能R 元件电感L 和电容C 上的i L 和U C 的初始值,以及t t 0时刻后的输入量U i (t ),则电路中各部分的电压、电流在t t 0时刻以后的值就完全确定了。
也就是说,i L 和U C 可构成完整的描述系统行为的一组最少个数的变量组,因此可选i L 和为U C 状态变量,即x 1(t )=i L , x 2(t )=u C (3) 将状态变量代入电压电流的关系式,有122121111i dx x U dt L L dx x x dt C RC=-+=- 经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程11i22110110x x L U L x x CRC ⎡⎤-⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦(4) 列写描述输出变量与状态变量之间关系的输出方程,(5) 将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表式11i221211011010x x L U L x x C RC x y x R ⎡⎤-⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦2-2 如题图2-2所示为RLC 电路网络,其中1()v t 为输入电压,2()v t 为输出电压。
试列写状态空间模型。
题图2-2解: (1) 根据回路电压和节点电流关系,列出各电压和电流所满足的关系式.1121d d d d d d d d C L L C CC L u i L R i C u t t u u u R C R i C t t ⎧⎛⎫+-=⎪ ⎪⎪⎝⎭⎨⎛⎫⎪+=- ⎪⎪⎝⎭⎩(2) 选择状态变量.状态变量的个数应为独立一阶储能元件(如电感和电容)的个数.对本题x 1(t )=i L , x 2(t )=u C (3) 将状态变量代入电压电流的关系式,经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程121121211122112121()()10()()R R R R R L R R L x x u L x x R R R C R R C --⎡⎤⎡⎤⎢⎥++⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎢⎥++⎣⎦ (4) 列写描述输出变量与状态变量之间关系的输出方程,()11212111221212d d ()()CL x u R R R y u R i C R x Cx x t R R R R ⎡⎤⎡⎤⎛⎫==-=-=⎢⎥⎢⎥ ⎪++⎝⎭⎣⎦⎣⎦(5) 将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达式121121211122112121121212121()()10()()()()R R R R R L R R L x x u L x x R R R C R R C x R R R y x R R R R --⎡⎤⎡⎤⎢⎥++⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎢⎥++⎣⎦⎡⎤⎡⎤=⎢⎥⎢⎥++⎣⎦⎣⎦2-3 设有一个弹簧-质量-阻尼器系统,安装在一个不计质量的小车上,如题图2-3所示。
状态方程化为约当标准型在控制系统中,状态空间法是一种常用的分析和设计方法。
状态空间法将系统的动态行为描述为状态方程,可以用于分析系统的稳定性、可控性和可观测性等性质,以及设计状态反馈控制器和观测器等控制器。
然而,当系统的特征值有重根时,状态方程的形式变得复杂,难以进行分析和设计。
本文将介绍如何将状态方程化为约当标准型,使得系统的特征值形式简单,易于分析和设计。
一、状态方程状态方程是描述系统动态行为的数学模型,通常由一组一阶线性微分方程表示:$dot{x}(t) = Ax(t) + Bu(t)$$y(t) = Cx(t) + Du(t)$其中,$x(t) in R^{n}$为系统的状态向量,$u(t) in R^{m}$为系统的输入向量,$y(t) in R^{p}$为系统的输出向量,$A in R^{n times n}$为状态矩阵,$B in R^{n times m}$为输入矩阵,$C in R^{p times n}$为输出矩阵,$D in R^{p times m}$为直接传递矩阵。
二、特征值与特征向量特征值和特征向量是描述矩阵性质的重要概念。
设$A in R^{n times n}$,如果存在$lambda in C$和非零向量$x in C^{n}$,使得$Ax = lambda x$,则称$lambda$为矩阵$A$的特征值,$x$为对应于特征值$lambda$的特征向量。
特征值和特征向量有以下性质:1. 特征值的个数等于矩阵的秩,包括复数和重根。
2. 特征向量可以归一化,即$|x| = 1$。
3. 特征向量组成矩阵$X = [x_{1}, x_{2}, ..., x_{n}]$,则$X^{-1}AX = diag(lambda_{1}, lambda_{2}, ..., lambda_{n})$,其中$diag(lambda_{1}, lambda_{2}, ..., lambda_{n})$为以$lambda_{1}, lambda_{2}, ..., lambda_{n}$为对角元的对角矩阵。