《六足仿生机器人》
- 格式:ppt
- 大小:1.58 MB
- 文档页数:17
l六足昆虫机器人机械原理一、基本原理本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步态规律实现爬行运动。
1、运动方式本项目机器人是模仿拥有六条腿的昆虫的爬行运动。
昆虫爬行想必大家都是见过的,但是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱,所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。
而要做好六足爬行机器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。
实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。
同一时间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前爬行。
我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这也许就是很多昆虫都是长了六条腿的主要原因吧。
以下是六足昆虫爬行步态的分解,以前进方向为例进行说明:1、静止时六条腿都是同时着地;2、前进时,先迈出第1组三条腿(左前、右中、左后),第2组三条腿着地(右前、左中、右后);3、第1组三条腿(左前、右中、左后)往前迈出着地后保持不动,然后换第2组三条腿(右前、左中、右后)往前迈出;4、第2组三条腿(右前、左中、右后)往前迈出着地后保持不动,再换第1组……如此循环往复,同一时间都保证有一组三条腿着地以保持身体的平衡,并不断往前进。
2、驱动机理本项目机器人是采用六足爬行的方式运动,对于六足的驱动力量也是有一定要求的,所以与前几个仿生类机器人项目一样都是借助减速电机所具有的“低转速、高扭矩”的特性来实现的。
与PVC-Robot 11号、PVC-Robot 12号机器人驱动双臂以及与PVC-Robot 13号驱动双足类似,本项目机器人六足中的中间两足是主动足,是由减速电机直接驱动的,而采用的减速电机同样也必须要满足两个条件:1、拥有足够的动力,能够支撑双足行走;2、减速电机左右两侧同轴输出。
六足仿蜘蛛机器人的结构设计与仿真分析一、概述随着科技的飞速进步,机器人技术已经逐渐渗透到各个领域,特别是在仿生机器人领域,其研究与应用更是取得了显著的成果。
六足仿蜘蛛机器人作为仿生机器人的一种,其结构设计与仿真分析是当前研究的热点之一。
六足仿蜘蛛机器人是一种模拟蜘蛛行走方式的机器人,具有适应性强、稳定性高、运动灵活等优点。
通过模拟蜘蛛的六足行走机制,该机器人能够在复杂环境中实现高效、稳定的运动,具有重要的应用价值。
在结构设计方面,六足仿蜘蛛机器人需要考虑多个因素,包括机械结构、驱动方式、运动学分析等。
机械结构是机器人的基础,需要合理设计各部件的尺寸、形状和连接方式,以实现机器人的稳定行走和灵活运动。
驱动方式的选择直接影响到机器人的运动性能和效率,常见的驱动方式包括电机驱动、液压驱动等。
运动学分析则是研究机器人运动规律的重要手段,通过对机器人运动学模型的建立和分析,可以预测和优化机器人的运动性能。
在仿真分析方面,通过建立六足仿蜘蛛机器人的虚拟样机,可以在计算机环境中进行各种实验和测试,以验证机器人设计的合理性和有效性。
仿真分析可以帮助研究人员快速发现设计中存在的问题,并进行相应的优化和改进。
仿真分析还可以为机器人的实际制造和测试提供重要的参考依据。
本文旨在探讨六足仿蜘蛛机器人的结构设计与仿真分析方法,为该类机器人的研究和应用提供有益的参考和借鉴。
1. 机器人技术的发展趋势随着科技的飞速进步,机器人技术正迎来前所未有的发展机遇。
从简单的自动化操作到复杂的智能决策,机器人技术正逐步渗透到我们生活的方方面面。
在当前的科技浪潮中,机器人技术的发展趋势呈现出以下几个显著特点。
人工智能技术的深度融合是机器人技术发展的重要方向。
随着深度学习、神经网络等技术的不断发展,机器人逐渐具备了更强的感知、理解和决策能力。
这使得机器人能够更好地适应复杂多变的环境,实现更高级别的自主操作。
机器人技术的集成化趋势日益明显。
传统的机器人往往只具备单一的功能,而现代机器人则更倾向于将多种功能集成于一体,实现一机多用。
摘要六足机器人有强大的运动能力,采用类似生物的爬行机构进行运动,自动化程度高,可以提供给运动学、仿生学原理研究提供有力的工具。
本设计中六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态和定点转弯等步态,实现六足机器人的姿态控制。
系统使用RF24L01射频模块进行遥控。
为提高响应速度和动作连贯性,六足机器人的驱动芯片采用ARM Cortex M4芯片,基于μC/OS-II操作系统,遥控器部分采用ARM9处理器S3C2440,基于Linux系统。
通过建立六足机器人的运动模型,运用正运动学和逆运动学对机器人进行分析,验证机器人步态的可靠性。
关键字:六足机器人,Linux,ARM,NRF24L01,运动学AbstractBionic hexapod walking robot has a strong ability of movement, the use of similar creatures crawling mechanism movement, high degree of automation, can be provided to the kinematics, the principle of bionics research provides powerful tool. Six feet in the design of this robot system based on bionics principle, the mechanical structure of the six-legged insect, through 18 steering gear control, use the gait, such as triangle gait and turning point to control the position ofsix-legged robot. Remote control system use RF24L01 rf modules. In order to improve the response speed and motion consistency, six-legged robot driver chip USES the ARM architecture (M4 chip, based on mu C/OS - II operation system, remote control part adopts ARM9 processorS3C2440, based on Linux system. By establishing a six-legged robot motion model, using forward kinematics and inverse kinematics analysis of robot, verify the reliability of the robot gait.KEYWORD:Bionic hexapod walking robot;Linux,ARM,NRF24L01;Kinematics目录1. 绪论2. 六足机器人的硬件搭建3. 操作系统的搭建4. 六足机器人的步态分析与实现5. 总结与展望1. 绪论1.1 多足机器人的发展状况目前,用于在人类不宜、不便或不能进入的地域进行独立探测的机器人主要分两种,一种是由轮子驱动的轮行机器人,另一种是基于仿生学的步行机器人。
项目研究报告北京理工大学机电学院 20081043 吴帆——小型仿生六足探测机器人一、课题背景:仿生运动模式的多足步行机器人具有优越的越障能力,它集仿生学原理、机构学理论、自动控制原理与技术、计算机软件开发技术、传感器检测技术和电机驱动技术于一体。
不论在何种地面上行走,仿生六足机器人的运动都具有灵活性与变化性,但其精确控制的难度很大,需要有良好的控制策略与精密的轨迹规划,这些都是很好的研究题材。
二、项目创新点:作为简单的关节型伺服机构,仿生六足机器人能够实现实时避障,合理规划行走路线。
简单的关节型机器人伺服系统不仅具有可批量制造的条件,作为今后机器人群系统的基本组成,也可以作为探索复杂伺服机构的研究对象。
三、研究内容:1.仿生学原理分析:仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界昆虫的运动原理。
足是昆虫的运动器官。
昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。
每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成。
基节是足最基部的一节,多粗短。
转节常与腿节紧密相连而不活动。
腿节是最长最粗的一节。
第四节叫胫节,一般比较细长,长着成排的刺。
第五节叫跗节,一般由2-5个亚节组成﹔为的是便于行走。
在最末节的端部还长着两个又硬又尖的爪,可以用它们来抓住物体。
行走是以三条腿为一组进行的,即一侧的前、后足与另一侧的中足为一组。
这样就形成了一个三角形支架结构,当这三条腿放在地面并向后蹬时,另外三条腿即抬起向前准备替换。
前足用爪固定物体后拉动虫体向前,中足用来支持并举起所属一侧的身体,后足则推动虫体前进,同时使虫体转向。
这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。
并不是所有成虫都用六条腿来行走,有些昆虫由于前足发生了特化,有了其他功用或退化,行走就主要靠中、后足来完成了。
大家最为熟悉的要算螳螂了,我们常可看到螳螂一对钳子般的前足高举在胸前,而由后面四条足支撑地面行走。
六足仿生机器人人们对机器人的幻想与追求已有3000多年的历史,人类希望制造一种像人一样的机器,以便代替人们完成各种工作。
1959年,第一台工业机器人在美国诞生,近几十年,各种用途的机器人相继问世,使人类的许多梦想变为现实。
随着机器人工作环境和工作任务的复杂化,要求机器人具备有更高的运动灵活性和特殊位置环境的适应性,机器人简单的轮子和履带的移动机构已不能适应多变复杂的环境要求。
在仿生技术、控制技术和制造技术不断发展的今天,各种各样的仿生机器人相继被研制出来,仿生机器人已经成为机器人家族重要的成员。
仿生爬行机器人是一种基于仿生学原理研制开发的新型足式机器人。
与传统的轮式或者履带机器人相比,足式机器人自由度多,可变性大、结构发杂、控制繁琐,但其在运动特性方面具有独特的优点:首先是足式机器人具有较好的机动性,对不平地面的适应能力十分突出,由于其立足点是离散的,与地面的接触面积较小,因而可以在可能达到的地面上选择最优支撑点,从而能够相对容易的通过松软地面以及跨过比较大的障碍;其次是足式机器人的运动系统可以实现主动隔振,允许机身运动轨迹与足轨迹解耦。
尽管地面高低不平,机身的运动仍可达到相对平稳。
本课题主要研究的内容是一种六足仿生机器人的机械机构部分的设计和分析,围绕六足仿生机器人的前沿技术,主要仿生对象为蚂蚁,主要实现机器人前后左右移动,具有良好的仿生特性,研究具有抗冲击性以及地形适应能力的仿生机设计技术,六足仿生机器人系统模型;研究六足机器人适应不同地形环境的能力。
研制系统设计与仿真等核心单元。
研制高速、高负载力、对典型非结构化地形具有高适应能力的六足仿生机器人,并开展系统结构、地形适应能力以及对抗控制实验验证。
本次设计的预期要达到的效果是可以实现灵活进退和转向,跨越障碍物,通过洼地和台阶并且保持平衡防止倾翻,能够实现实时避障,合理规划行走路线。
1、技术方案一、机器人功能介绍:a)可实现前进后退转弯等基本动作,加装传感器后对小障碍物越过、大障碍物绕开,具有遥控模式,可通过无线装置无线控制。
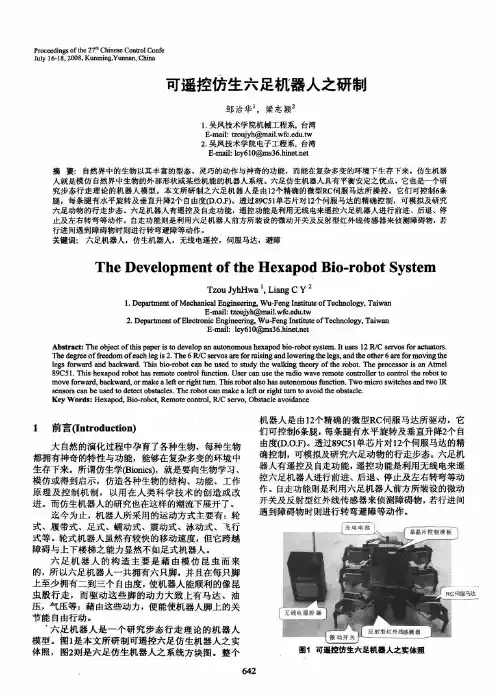
2019年8期创新前沿科技创新与应用Technology Innovation and Application六足仿生蜘蛛机器人步态轨迹规划研究张思晨,莫书维,关荣博,范博(合肥工业大学,安徽合肥230009)蜘蛛机器人反应速度较快,移动姿势较为灵活,可以代替人类完成和很多操作。
为了深入探究六足蜘蛛机器人功效,可以采用虚拟样机,对机器人步行轨迹进行仿真,根据仿真结果做出适当调整,使其满足机器人操作需求[1]。
本文将重点探究蜘蛛机器结构、步态原理,通过构建仿真模型,对机器人进行仿真分析。
1六足仿生蜘蛛机器结构1.1机器人整体设计为了提高机器人结构强度,本文通过查找文献资料,对机器人结构进行了研究分析,最终选取菱形作为机器人基本结构[2]。
该结构不仅能够增加机器人腿部活动空间,而且还能够减少腿部之间的碰撞,避免行走过程中相互干涉。
从材料消耗角度来看,菱形机器人还能够减少材料消耗量,整体重量也比较小,这也是蜘蛛机器人行走灵活主要因素之一。
选取铝制材料为主要材料,利用外围设备、多种传感器、供电电池、核心控制器单片机构建机器人整体结构。
1.2躯干设计为了保证蜘蛛机器人正常运行,必须保证控制器安置位置在一个不容易活动的位置,避免活动幅度较大,对控制器程序命令下达造成影响。
本文对机器活动关节进行研究分析,从中选取躯干部位作为控制器安装位置。
这种安装方式不仅可以为机器人操控提供便利条件,而且还可以避免控制器受器件活动影响。
考虑到控制器控制操作要求较高,采用传统的开发方式无法满足机器人操控需求。
因此,本文选取Arduino 作为开发环境[3]。
首先,对各个传感进行初始化处理。
其次,根据操作需求,对各个传感器下达控制命令,以传感器驱动方式控制机器人运行轨迹,通过调整算法,对数据进行处理,从而实现命令操控[4]。
1.3头部设计本文设计的蜘蛛机器人在运行过程中,需要根据采集到的视频信息,对运行轨迹做出调整。
根据此运行操控原理,构建三维坐标系,在机器人的头部安装微型摄像头,并利用微型摄像头360度采集视频信息,将采集到的视频信息转换为三维坐标信息,在x ,y ,z 轴上生成移动轨迹,从而获取机器人移动轨迹[5]。
六足仿生机器人研究报告摘要:多足仿生机器人拥有的出色的地形适应能力使其在特种机器人领域闪耀夺目,成为近年来机器人领域的一颗无法忽视的新星。
本课题所研制六足仿生机器人由18个舵机组成6条腿,每条腿有1个水平旋转及2个垂直升降共3个自由度。
该六足仿生机器人由ATmega16单片机精确控制到每个舵机,可实现机器人模仿昆虫三三足行走。
本文将从六足仿生机器人的设计、六足仿生机器人的功能实现、六足仿生机器人的功能扩展三大方面展示研究成果。
关键词:六足仿生机器人;昆虫行走;地形适应能力;跨障一、六足仿生机器人的设计六足仿生机器人集仿生学原理、机构学理论、计算机软件开发技术、自动控制原理与技术、传感器检测技术和电机驱动技术于一体。
对于传统的行动结构,其优势在于其具有的优越的跨障碍能力,以及在复杂地形条件下的地形适应能力。
本课题基于六足仿生机器人的行走方式、行动机构结构设计、伺服器的驱动进行研究。
1.仿生学原理分析该六足仿生机器人基于模仿昆虫的运动原理设计而成,故本课题首先对昆虫如何运动进行了研究。
昆虫有3对共6条足,分别分布于前、中、后胸,由所处位置相应被称为前足、中足、后足,每条足可分为六节,由基部向末端依次为基节、转节、腿节、胫节、跗节和前跗节。
昆虫的足的主要自由度可视为3个,分别由转节、胫节、跗节完成,实现足的自由活动。
昆虫行走时每次以三条足为一组,两组足交替运动。
在昆虫的实际运动过程中,昆虫前进、后退、转向时其足皆按此方法三三足行走,只是由每条足移动的位置不同而实现不同的动作。
2.六足仿生机器人运动学分析(1)三角步态行走法昆虫运动时,它的三对足分为两组交替运动,每三足构成一个三角形支架结构,这便是三角步态行走法。
在六足仿生机器人的实际运动中,其步态多种多样,而三角步态行走法为六足仿生机器人实现行走的典型步态。
(2)六足仿生机器人的行走分析①昆虫的足主要有3个自由度,因此在机器人的每条足上我们安装了3个可实现角度精确控制的舵机来实现3个自由度,其中1个水平旋转自由度、2个垂直升降自由度。
六足仿生机器人作者:李志刚来源:《科技创新与品牌》2013年第09期仿生机器人是近十几年来出现的新型机器人,它的思想来源于仿生学,其目的是研制出具有动物某些特征的机器人。
仿生机器人是仿生学的先进技术与机器人领域的各种应用的最佳结合。
在第十二届中国青少年机器人竞赛中,就有这样的创意作品。
吉林市吉化第九中学石慧语、李金泽、李泓辰同学在陈希勇老师指导下设计研制出的六足仿生机器人虽然没有国际高端科技,但却是学生们充分发挥了创新与动手能力制作出的,其行动能力非常强。
创意小组通过查阅大量资料,了解到,昆虫是节肢动物,六条有关节的步足,使得它们能在世界各地各种各样的环境下运动生存。
目前人类掌握的陆地运输工具—车,虽然有很多的优点,但是面对崎岖蜿蜒的山路和坎坷路面、沟壑等,也往往是一愁莫展。
通过创意小组的调查研究,认为如果模仿昆虫的陆地运动方式制作出六足仿生步行机器人的话,那它就会具有优越的越障能力。
无论是在崎岖的山道上还是在岌岌可危的废墟瓦砾上,甚至是凶险莫测的战场上,六足仿生步行机器人都具有灵活的应对能力。
因此,创作小组计划制作一个既能在普通路面上稳步前进,又能在其他复杂多变的环境下行进的六足仿生步行机器人。
创意小组利用乐高机器人套装,根据昆虫的六足运动方式的特点来搭建六足仿生步行机器人,将三对仿生足分成两组,以“三角形支架”结构交替前行。
身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个“三角形支架”。
当一组“三角形支架”中所有的足同时提起时,另一组“三角形支架”的三只足原地不动,支撑身体,并以其中足为支点,相互轮换周而复始,于是,机器人呈“之”字形的曲线前进。
创意小组利用RCX作为“大脑”实现对机器人运动的调控,再安装两个触动传感器模拟昆虫的触角,通过触动调节来调整机器人的运动,如前进、后退、转弯等。
它具有两种行进方式,一个是模仿六足昆虫,以六条足完成在崎岖的道路上以及在废墟瓦砾上行走,实施运输、救援等工作;另一个是在平整的道路环境下,以车轮运动的方式,像其他各种车辆一样行进。
六足仿生蟑螂机器人设计刘美华;文应基;蒲宏辉【摘要】介绍了一款基于单片机控制的六足仿生蟑螂机器人.该机器人在外形和足部结构上仿生蟑螂,六足均匀分布于身体两侧,每足给出了3个自由度;机器人的步态采用经典的三足步态法;该运动控制器由STC 12C5A60S2单片机和舵机组成,采用多舵机分时控制的方法,机器人能实现按所设计的步态规划进行前进、后退、左转、右转等动作;同时添加了语音模块,机器人能在预定程序下随音乐进行舞蹈动作.【期刊名称】《微型机与应用》【年(卷),期】2015(034)006【总页数】4页(P50-52,55)【关键词】六足仿生机器人;三足步态法;STC12C5A60S2单片机;舵机【作者】刘美华;文应基;蒲宏辉【作者单位】湖南工程学院工程训练中心,湖南湘潭411101;湖南工程学院应用技术学院,湖南湘潭411101;湖南工程学院应用技术学院,湖南湘潭411101【正文语种】中文【中图分类】TP242仿生学是20世纪60年代初诞生的一门集生物科学和工程技术于一体的边缘学科,主要通过学习、模仿、复制和再造生物系统的结构、功能、工作原理及控制机制,来改进现有的或创造新的机械、仪器、建筑和工艺过程[1]。
蟑螂运动灵活稳定,对地形适应能力强,是仿生的热点。
本文所设计的六足仿生爬虫机器人,其外形及其机械结构参考蟑螂的特点,运动控制器由STC12C5A60S2单片机和舵机组成,采用多舵机分时控制,能够按照指令要求正确切换功能并且完成相应动作。
仿生蟑螂六足机器人由躯体和足两个基本部分组成,足和躯体的配置采用正相对称分布。
基于自然界中绝大部分蟑螂的躯体都呈近似长方形结构,因此躯体设计成以身体纵向中心线为对称轴的多边形,且长与宽之比约为3:1,材料选用高强度且质量较轻的铝合金。
6条腿均匀分布于身体两侧,腿形参考蟑螂足部结构,4个关节分别为髋关节、大腿、小腿和踝关节,其中前3个关节为驱动关节,各关节之间的连杆分别称为基节、股节和胫节[2]。
六足仿生机器人的设计与实现樊启润;唐彪;孙开鑫;万美琳;卢仕【摘要】所述六足仿生机器人基于SoC FPGA平台实现,结合了机械结构设计、六足步态控制、蓝牙传输技术、弯曲传感器、OpenCL图像处理加速、VR显示等诸多技术;ARM部分作为主控,存储摄像头视频图像,并调用FPGA模块对图像处理加速,通过路由器架设的局域网向VR眼镜输出视频流信息;FPGA部分用于接收蓝牙信号,驱动机器人手臂运动,摄像头拍摄角度切换以及六足行进;实际操作时操作者需佩戴自制的数据手套和VR眼镜;操作数据手套上的方向按键可控制机器人移动;数据手套的每个手指上安装有弯曲传感器,用于控制机械手臂跟随人手实时运动;VR 眼镜中放置一个智能手机作为显示终端,实时显示机器人摄像头获取的画面;经过多次实际测试,操作者佩戴VR眼镜及数据手套均可远程操控机器人抓取置于复杂地形中的水瓶.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)005【总页数】7页(P245-250,270)【关键词】六足仿生机器人;SoC FPGA;OpenCL图像处理加速;VR显示【作者】樊启润;唐彪;孙开鑫;万美琳;卢仕【作者单位】湖北大学物理与电子科学学院,武汉430062;湖北大学物理与电子科学学院,武汉430062;湖北大学物理与电子科学学院,武汉430062;湖北大学物理与电子科学学院,武汉430062;湖北大学物理与电子科学学院,武汉430062【正文语种】中文【中图分类】TP2740 引言近年来,用机器人替代人类进入条件恶劣或者高度危险的区域工作已经成为一种趋势。
例如机器人进行水下作业、无人机进行侦查勘测、机器人在废墟中探测生命迹象等。
然而许多在路面作业的轮式或履带式机器人在遇到复杂地形时,因地形原因将无法正常工作。
其次大多数的机械臂无法像人手一般灵活,在特殊环境下增加了控制者的操作难度为解决以上问题,本项目基于SOC-FPGA平台设计实现了一种可在复杂地形行动,机械臂可跟随人手实时作业,可运用VR眼镜实时观察行径中的全景图像的六足仿生机器人。
一、前言談到足式機器人,當然目前主流大多是聯想到和人相似、有親切感的雙足機器“人”,從某一層面來看,以雙足步行為演化上的一個極為小眾的特例,本身對達到穩定運作控制的困難度很高,從瞭解「生物出生到可以開始自行運動所需的時間」便可以窺知一二。
從另一個角度來看,人類所能自在運動的地表也侷限在某一些型態之中,若要探討如何在各式自然地形上運動的法則,勢必得回過頭來探討多足動物的運動機制。
而從物理直覺來評析,單就在崎嶇路面上運動的穩定性來探討,採用多足機器人會比較簡單且實際。
基於這一些原因,仿生多足機器人的研發便有了背後的動機,模仿經過長時間演化後動物的構造,藉由觀察牠們的運動,了解為什麼有如此的動作,再利用機構或是控制去完成。
在自然界中,我們看到體型較大、有優秀運動能力的動物像馬、獵豹、羚羊等等都是四隻腳的哺乳類動物,但考慮到穩定性卻是六足比較佔優勢,只要用簡單的三腳步態(tripod gait)即可讓重心輕易落在支撐的三角形中。
四足動物的腳可能需要比較大的力量才能表現出他的特性,但人類尚無法仿造出重要的肌肉和控制系統,以現有機構和馬達組成的系統,重量太重而無法有效運動。
這時,自由度的選擇以及機構設計便成了一個很重要的課題。
這二、三十年學業界創造出了許多各式各樣的多足機器人,在後續的文章中便為各位讀者進行介紹[2, 3]。
二、學術界開發仿生多足機器人(1)Quadruped圖一 Quadruped[4]由Prof. Marc Reibert所領導的MIT Leg Lab於1984~1987年製作,重38公斤,整體長度1.05公尺,高度0.95公尺,採用長柱狀的腳,每一隻腳連接身體的關節是由兩個液壓致動器(hydraulic actuators)組成,分別控制腳的前後及左右的旋轉,腳上有一個線性致動器來提供推進力。
在控制上將腳簡易的分成兩組,不同的分組方法便產生了小跑(trot)、跑(pace)和奔馳(bound)等三種步態,奔馳可達到3.5個身體長度,有很好的穩定性和運動特性。