机械手手爪设计类型及其计算演示幻灯片
- 格式:ppt
- 大小:62.14 MB
- 文档页数:52
![机械手手爪设计类型及其计算[借鉴材料]](https://uimg.taocdn.com/107b675f5022aaea988f0f4b.webp)
机器人机械手爪综述目录一、夹钳式手部设计的基本要求 (3)二、典型机械爪结构 (4)1)回转型 (4)2)移动型 (5)三、夹钳式手部的计算与分析 (9)1)夹紧力的计算 (9)2)夹紧缸驱动力计算 (11)3)计算步骤 (12)4)手爪的夹持误差分析与计算 (12)四、常用气爪 (17)1)气动手指气缸具有如下特点: (17)2)气动手指气缸主要类型与型号 (18)工业机器人的手部(亦称机械爪或抓取机构)是用来直接握持工件的部件,由于被握持工件的形状、尺寸大小、重量、材料性能、表面状况等的不同,所以工业机械手的手部结构是多种多样的,大部分的手部结构是根据特定的工件要求而设计的。
常用的手部,按其握持工件的原理,大致可分成夹持和吸附两大类。
夹持类常见的主要有夹钳式,此外还有钩托式和弹簧式。
夹持类手部按其手指夹持工件时的运动方式,可分为手指回转型和手指平移型两种,如图1所示。
吸附类中,有气吸式和磁吸式。
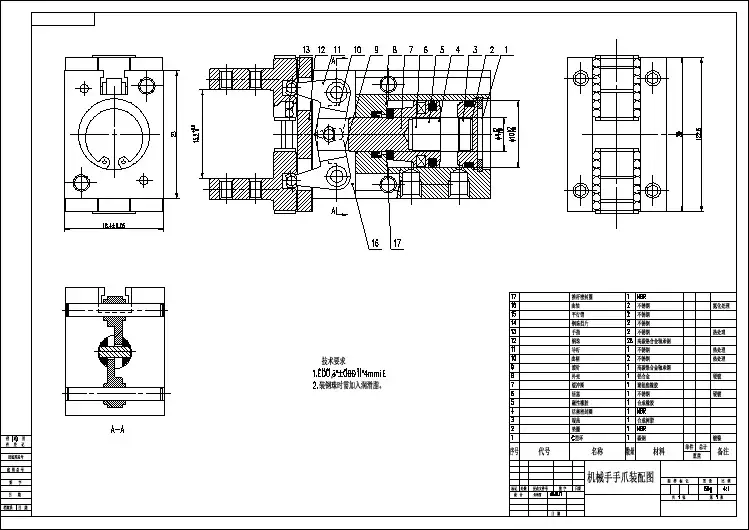
a)回转型内撑式b)回转型外夹式c)平移型外夹式d)钩托式e)弹簧式f)气吸式g)磁吸式图1 机械爪类型夹钳式手部是由手指、传动机构和驱动装置三部分组成的,它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件。
一般情况下,多采用两个手指,少数采用三指或多指。
驱动装置为传动机构提供动力,驱动源有液压、气动和电动等几种形式。
常见的传动机构往往通过滑槽、斜楔、齿轮齿条、连杆机构实现夹紧或松开。
平移型手指的张开闭合靠手指的平行移动,适于夹持平板、方料。
在夹持直径不同的圆棒时,不会引起中心位置的偏移。
但这种手指结构比较复杂、体积大,要求加工精度高。
回转型手指的张开闭合靠手指根部(以枢轴支点为中心)的回转运动来完成。
枢轴支点为一个的,称为单支点回转型;为两个的,称为双支点回转型。
这种手指结构简单,形状小巧,但夹持不同工件会产生夹持定位偏差。
a)单支点回转型b)双支点回转型C)平移型(平直指)图2 回转型和平移型手指一、夹钳式手部设计的基本要求1. 应具有适当的夹紧力和驱动力。

机械手手爪的三维设计1手部设计基本要求(1)应具有适当的夹紧力和驱动力。
应当考虑到在一定的夹紧力下,不同的传动机构所需的驱动力大小是不同的。
(2)手指应具有一定的张开范围,手指应该具有足够的开闭角度(手指从张开到闭合绕支点所转过的角度)△"以便于抓取工件。
(3)要求结构紧凑、重量轻、效率高,在保证本身刚度、强度的前提下,尽可能使结构紧凑、重量轻,以利于减轻手臂的负载。
(4)应保证手抓的夹持精度。
2典型的手部结构(1)回转型包括滑槽杠杆式和连杆杠杆式两种。
(2)移动型移动型即两手指相对支座作往复运动。
(3)平面平移型。
3机械手手爪的设计计算3.1选择手爪的类型及夹紧装置本设计是设计抓取圆柱形物块的机械手。
常用的工业机械手手部,按握持工件的原理,分为夹持和吸附两大类。
吸附式常用于抓取工件表面平整、面积较大的板状物体,不适合用于本方案。
本设计机械手采用夹持式手指,夹持式机械手按运动形式可分为回转型和平移型。
平移型手指的张开闭合靠手指的平行移动,这种手指结构简单,适于夹持平板和圆柱类材料,且工件径向尺寸的变化不影响其轴心的位置,其理论夹持误差为零。
通过综合考虑,本设计选择移动型手爪,采用丝杠螺母这种传动结构方式。
运行方式为电机带动直齿轮使丝杠转动继而带动手爪接触块移动,从而形成手爪的张合,当手爪抓到零件时,电机停止,手爪形成自锁,带动零件移动。
丝杆电机图1二维手爪结构图3.2手爪夹持范围计算加工毛坯尺寸:①20-①30长度:100左右毛坯质量(以钢材的密度计算):约246g-555g (按最大600g计算)装夹深度:约25mm纵向定位精度:0.1mm横向定位精度:1mm手爪接触块为橡胶,橡胶具有弹性大,定伸强度高,抗撕裂性和电绝缘性优良,耐磨性和耐旱性良好,加工性佳等特点图2手爪橡胶3.3滑动丝杠设计设计条件:需自锁丝杠长度145mm最大质量共计约1100g。
丝杠载荷:丝杠竖直时承受最大轴向力F amax=11.6N, G=mg (g取10N/kg)设计计算:(计算部分由小组成员张益完成本人参与讨论)(1)牙型、材料和许用应力采用梯形单头螺纹螺杆材料选45钢,调制处理,仃s=360N/mm2,由机械手册查表可得许用拉应力2o=—匚=120〜72N/mm (1)p3〜5手爪部分为轻载,螺母材料选耐磨铸铁。