3 雷达测距原理与脉冲法测距
- 格式:ppt
- 大小:1.54 MB
- 文档页数:38
激光测距的方法及原理激光测距技术与一般光学测距技术相比具有操作方便、系统简单及白天和夜晚都可以工作的优点。
与雷达测距相比,激光测距具有良好的抗干扰性和很高的精度,而且激光具有良好的抵抗电磁波干扰的能力。
其在探测距离较长时,激光测距的优越性更为明显。
光测距技术是指利用射向目标的激光脉冲或连续波激光束测量目标距离的距离测量技术。
较常用的激光测距方法有三角法、脉冲法和相位法激光测距。
1.三角法激光测距激光位移传感器的测量方法称为激光三角反射法,激光测距仪的精度是一定的,同样的测距仪测10米与100米的精度是一样的。
而激光三角反射法测量精度是跟量程相关的,量程越大,精度越低。
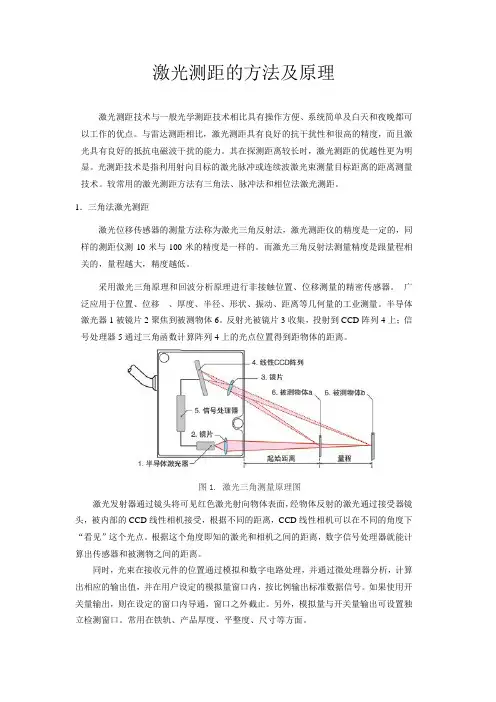
采用激光三角原理和回波分析原理进行非接触位置、位移测量的精密传感器。
广泛应用于位置、位移、厚度、半径、形状、振动、距离等几何量的工业测量。
半导体激光器1被镜片2聚焦到被测物体6。
反射光被镜片3收集,投射到CCD阵列4上;信号处理器5通过三角函数计算阵列4上的光点位置得到距物体的距离。
图1. 激光三角测量原理图激光发射器通过镜头将可见红色激光射向物体表面,经物体反射的激光通过接受器镜头,被内部的CCD线性相机接受,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。
根据这个角度即知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物之间的距离。
同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。
如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。
另外,模拟量与开关量输出可设置独立检测窗口。
常用在铁轨、产品厚度、平整度、尺寸等方面。
2.脉冲法激光测距脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间。
光速和往返时间的乘积的一半,就是测距仪和被测量物体之间的距离。
脉冲法测量距离的精度是一般是在+/- 1米左右。
雷达系统工作原理
雷达系统工作原理主要包括脉冲雷达和连续波雷达两种类型。
这两种雷达系统在原理上有一些不同,但都是通过向目标发射微波信号并接收回波来实现目标检测和跟踪的。
脉冲雷达系统利用脉冲信号的特性来进行测量。
它通过向目标发送短暂的高功率脉冲微波信号,然后等待接收目标反射回来的回波信号。
脉冲雷达通过测量回波的时间延迟来计算目标离雷达的距离。
由于脉冲雷达系统的工作原理是基于发送和接收之间的时间差,所以它对目标距离的测量精度相对较高。
连续波雷达系统则是通过连续地发射和接收微波信号来实现目标探测和跟踪的。
它向目标发送一定频率的持续微波信号,并接收目标反射回来的信号。
连续波雷达通过测量接收到的信号的频率变化来计算目标的速度。
由于连续波雷达系统的工作原理是基于信号频率的变化,所以它对目标速度的测量精度相对较高。
不论是脉冲雷达还是连续波雷达,雷达系统都需要利用天线来发射和接收微波信号。
雷达系统会向天空或水平面发射微波信号,并接收由目标反射回来的信号。
接收回波信号经过放大、滤波等信号处理后,会对信号进行分析和解调,从而得到目标的距离、速度、方位等信息。
总而言之,雷达系统工作的主要原理是利用发射和接收微波信号来探测目标并获取目标信息。
无论是脉冲雷达还是连续波雷达,它们都通过测量回波的时间延迟和频率变化来计算目标的
距离和速度。
雷达系统广泛应用于军事、航空、气象等领域,发挥着重要的作用。
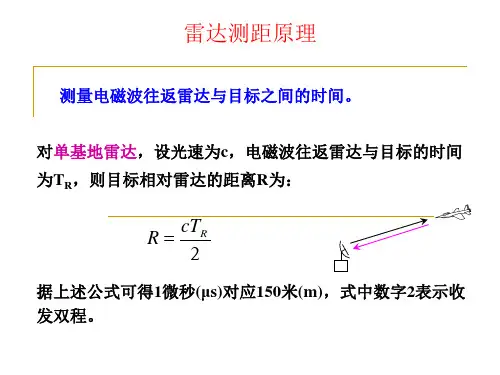
雷达测距原理及实现方法一、雷达测距原理雷达是利用无线电波进行探测和测距的一种技术。
雷达测距是通过测量从雷达到目标物体的往返时间差来估计目标的距离。
雷达测距的原理可以简单地概括为发射一束射频信号,当这个信号遇到目标时,部分能量被目标吸收或散射,剩下的能量会返回雷达。
雷达系统接收这个返回的信号,并测量从发送到返回信号的时间差,然后根据电磁波在空气中的传播速度,就可以计算出目标到雷达的距离。
具体实现雷达测距的原理有以下几种:1.脉冲测距原理:脉冲测距原理是利用发射一组很短的脉冲信号,并测量从发送到返回信号的时间来计算距离。
这种方法的特点是简单、精度较高,适用于对距离变化不频繁的目标进行测距。
2.相位测距原理:相位测距原理是利用发射一组连续波信号,并测量信号的相位变化来计算距离。
相位变化与距离成正比,并且可以通过频率测量的方法,精确计算出距离。
相位测距一般用于对动态目标进行测距。
3.干涉测距原理:干涉测距原理是利用发射两个相干的连续波信号,并测量两个信号之间的干涉现象来计算距离。
干涉测距具有高精度和高抗干扰性能的特点,适用于对距离变化频繁的目标进行测距。
4.多普勒测距原理:多普勒测距原理是利用目标在接收到的波的频率上所引起的多普勒频移来计算目标的速度和距离。
多普勒测距一般用于对移动目标进行测速和测距。
二、雷达测距实现方法实现雷达测距需要几个关键的组件和步骤:1.发射器和天线:发射器产生并发送无线电波的信号,天线用于辐射和接收电磁波。
2.接收器:接收器用于接收从目标返回的信号,并将其转换成电信号。
3.信号处理:接收到的信号经过信号处理子系统进行滤波、放大、调制等操作以提取出目标信息。
4.时间测量:雷达系统需要测量从信号发射到接收到返回信号的时间差。
可以通过多种方法实现时间测量,例如使用计数器、脉冲计时器等。
5.距离计算:根据从时间测量得到的时间差,结合电磁波在空气中的传播速度,通过计算得到目标到雷达的距离。
激光测距实验报告激光脉冲测距实验1.实验目的通过学习激光脉冲测距的工作原理;了解激光脉冲测距系统的组成;搭建室内模拟激光脉冲测距系统进行正确测距,为今后的工程设计奠定理论基础和工程实践基础。
2.实验原理激光脉冲测距与雷达测距在原理上是完全相同的,如图所示。
在测距点激光发射机发射激光脉冲,光脉冲经过光纤到达接收端,并被测距机上的探测系统接收。
测出从激光发射时刻到被接收时刻之间的时间间隔t,根据已知光速,即可求出光纤的长度R为R=/2式中c为光速。
真空中的光速是一个精确的物理常数C1=299792458 m/s光纤中的平均折射率n为n=故光纤中的光速为C=299710000可见,激光测距的任务就是准确地测定时间间隔t。
当不考虑光纤中光速的微小变化时,测距精度⊿R主要是由测时精度⊿t确定的⊿R=C⊿t/2实际脉冲激光测距机中是利用时钟晶体振荡器和脉冲计数器来测定时间间隔t的。
时钟晶体振荡器用于产生固定的频率的电脉冲振荡,脉冲计数器的作用是对晶体产生的电脉冲个数进行计数。
设晶体振荡器产生的电脉冲频率为f,则脉冲间隔T=1/f。
若从激光脉冲发出时刻脉冲计数器开始计数,到光脉冲被接收时刻停止计数。
设这段时间内脉冲计数器共计得脉冲个数为m,则可计算出被测光纤的长度为R=1/2cmT=cm/f=相应的测距精度为⊿R =1/2Ct=c/可见,脉冲激光测距机的测距精度由晶振的频率决定。
常用军用激光测距仪的晶振频率有15MHz、30MHz、75MHz和150MHz 等,与其相对应的测距精度分别为正负10m、正负5m 、正负2m和正负1m。
晶振的频率愈高,测距精度就愈高,但随之而来的,不仅是计数器的技术难度增加,而且要求激光脉冲的宽度愈窄,激光器的难度也增加。
对脉冲测距系统,计数器的“开门”信号是由取出一小部分发射激光脉冲经光探测器转换成电信号形成的。
这两个信号既可由同一探测器提供,也可以用两个探测器提供。
激光脉冲测距机由激光器、发射光学系统、接收及瞄准光学系统、取样及回波探测放大系统、技数及显示器和电源几部分组成,如图所示系统操作人员一旦下达发射激光命令,激光器发射一束窄激光脉冲,经发射光学系统扩束后射向接收系统,其中一小部分经取样后启动计数器开始计数。

1、测距测方位原理:超高频无线电波空间传播具有等速、直线传播的特性,遇到物标有良好的反射现象,记录雷达脉冲离开天线的时间t1和无线电脉冲波遇到物标反射回到天线的时间t2,则物标离天线的距离可由下式求出:S=C(t2-t1)/2。
超高频无线电波在空间的传播是直线的,只要把天线做成定向天线,那么天线所指的方向就是天线的方向。
如果天线旋转,依次向四周发射与接收,当在某个方向上收到物标回波时,记下此时的天线方向就可知道物标的方向了。
2、脉冲重复频率:每秒钟内脉冲重复出现的次数。
脉冲宽度:就是射频脉冲振荡持续的时间。
3、磁控管使用与保管:1.检修维护保养时,谨防特高压触电伤人,接触管子阴极前,先关机,并将高压放电。
2.严防大功率超高频电磁波损伤人脑及眼睛。
雷达发射时不要站在开口波导前或天线辐射窗面前。
3.接触磁控管时,应先脱去手表,以防手表磁化。
4.加高压前,应保证阴极已充分预热。
频繁使用雷达时,可不关低压只关高压,以免灯丝忽冷忽热而损坏。
5.要注意保护磁场。
存放时离开铁磁体至少10cm,两个磁控管间至少离开20cm。
严禁敲打、震动。
6.要保证负载匹配。
防止波导或天线内积水或有污物堵塞或断裂、变形或连接不良等现象。
7.新管或长期保存未用的管子,加高压前要先进行‘老练’。
4、半功率点水平/垂直波束宽度:在天线功率方向特性图中主瓣波束的两个半功率点方向间的夹角称为主瓣的波束宽度。
在水平面内的波束宽度称为水平波束宽度,在垂直面内的波束宽度称为垂直波束宽度。
旁瓣电平:旁瓣相对于主瓣的大小,即相对减弱的倍数,用分贝数表示,称为旁瓣电平。
雷达缝隙波导天线,如果要求半功率点水平波束宽度θ<=°,天线要多长θ=70λ/L L=10cm 代入则L>=7.接收机是怎样工作的它受显示器面板上哪些旋钮、开关控制接收机将接收到的超高频回波信号通过变频器变成频率较低的中频回波信号,再通过中频放大器放大几十万倍,然后由检波器检波,再由前置视频放大器初步放大检波器输出的视频脉冲信号并实现前后电路的相互匹配,输出视频脉冲信号用同轴电缆送给显示器。
雷达简答整理1、测距测⽅位原理:超⾼频⽆线电波空间传播具有等速、直线传播的特性,遇到物标有良好的反射现象,记录雷达脉冲离开天线的时间t1和⽆线电脉冲波遇到物标反射回到天线的时间t2,则物标离天线的距离可由下式求出:S=C(t2-t1)/2。
超⾼频⽆线电波在空间的传播是直线的,只要把天线做成定向天线,那么天线所指的⽅向就是天线的⽅向。
如果天线旋转,依次向四周发射与接收,当在某个⽅向上收到物标回波时,记下此时的天线⽅向就可知道物标的⽅向了。
2试画出船⽤雷达基本组成框图,并说明各部分的作⽤触发电路:⼜称触发脉冲发⽣器,定时器或定时电路。
任务是每隔⼀定时间产⽣⼀个作⽤时间很短的尖脉冲送到发射机、接收机和显⽰器,使他们同时⼯作。
发射机:在触发脉冲电路控制下产⽣⼀个具有⼀定宽度的⼤功率、超⾼频的脉冲信号,即发射脉冲,经波导馈线送到天线向外发射。
天线:把发射脉冲的能量聚成细束朝⼀个⽅向发射出去,同时也只接收丛该⽅向的物标反射的回波,并再经波导馈线送到接收机。
接收机:把回波信号进⾏变频——变成中频回波信号,然后再放⼤、检波,再放⼤,变成显⽰器可现实的视频回波信号。
发开关:在发射时⾃动关闭接收机⼊⼝,让⼤功率发射脉冲只送到天线向外辐射⽽不进⼊接收机,以防⽌他损坏接收机,⽽在发射结束时,⼜能⾃动接通接收机通路让微弱的回波信号顺利进⼊接收机,同时切断发射机通路,以防⽌回波信号能量的流失。
显⽰器:在触发脉冲控制下产⽣⼀个锯齿电流,在屏上形成⼀条径向亮线,同时计时,计算物标回波的距离,同时,这条扫描线⽅位电⽅位扫描系统带动随天线同步旋转。
这样,显⽰器根据接收机送来的回波信号、天线送来的⽅位信号将物标回波显⽰在物标所在的⽅位和距离上。
雷达电源设备:)超⾼频的脉冲信号,即发射脉冲(或称射频脉冲);射频脉冲经波导馈线送⼊天线外发射组成及作⽤:脉冲调制器a.在触发脉冲控制下,预调制器产⽣⼀个具有⼀定宽度,⼀定幅度的正极性矩形脉冲(预调制脉冲)去控制调制器的⼯作。
超声波雷达的测距原理超声波雷达是一种测距装置,其基本原理是利用超声波在空气或其他介质中的传播速度和反射特性,测量目标物体与雷达之间的距离。
超声波雷达广泛应用于工业、交通、军事等领域,成为现代测距技术的重要手段之一。
一、超声波的特性超声波是指频率超过20kHz的机械波,是一种高频声波。
它在空气或其他介质中的传播速度比普通声波快,可以穿透一些材料,如塑料、木材、水等。
超声波的传播、反射、衍射和干涉等特性,使其在测距、检测、成像等方面有广泛的应用。
二、超声波雷达的组成超声波雷达主要由发射器、接收器、信号处理器和显示器等部分组成。
其中,发射器用于发射超声波脉冲,接收器用于接收反射回来的超声波信号,信号处理器用于处理和分析接收到的信号,显示器用于显示测距结果。
三、超声波雷达的测距原理超声波雷达的测距原理基于超声波在空气或其他介质中的传播速度和反射特性。
当超声波遇到物体时,会发生反射、折射和透射等现象。
超声波在物体表面反射回来的时间,可以用来计算物体与雷达之间的距离。
超声波雷达发射器发射超声波脉冲,经过一段时间后,超声波到达目标物体表面,被反射回来,接收器接收到反射回来的超声波信号。
信号处理器通过测量超声波发射和接收的时间差,计算出目标物体与雷达之间的距离。
四、超声波雷达的应用超声波雷达广泛应用于工业、交通、军事等领域。
在工业领域,超声波雷达可以用于测量液位、流量、压力、温度等参数。
在交通领域,超声波雷达可以用于测量车辆速度、距离、方向等信息。
在军事领域,超声波雷达可以用于侦测敌方战机、舰船、坦克等目标,进行跟踪、识别和打击。
五、超声波雷达的优缺点超声波雷达具有测距精度高、测量范围广、反应时间短、抗干扰能力强等优点,但也存在一些缺点,如受温度、湿度、气压等环境因素影响较大,易受到目标表面形状、材质和表面状态等影响,不适用于测量透明物体和液体等。
六、总结超声波雷达是一种利用超声波测量距离的装置,其测距原理基于超声波在空气或其他介质中的传播速度和反射特性。
毫米波雷达测角、测速、测距原理
毫米波雷达是一种利用毫米波频段的电磁波进行测量和探测的雷达系统。
它具有测角、测速和测距等多种功能,广泛应用于物流、交通、安防、军事等领域。
我们来看毫米波雷达的测角原理。
毫米波雷达通过发射一束狭窄的毫米波束,然后接收由目标物体反射回来的毫米波。
通过分析接收到的波形,可以确定目标物体的方向。
毫米波雷达的天线通常采用相控阵技术,通过改变天线阵列的相位和幅度,实现波束的方向控制。
通过扫描整个空间,毫米波雷达可以实现对目标物体的测角。
毫米波雷达还可以实现对目标物体的测速。
测速原理是基于多普勒效应,即当目标物体相对于雷达系统运动时,由于频率的变化,接收到的波形也会发生变化。
通过分析波形的频率变化,可以确定目标物体的速度。
毫米波雷达通常采用连续波或调频连续波的方式进行测速,具有高精度和高灵敏度的特点。
毫米波雷达还可以实现对目标物体的测距。
测距原理是基于雷达的工作原理,即通过测量发射和接收之间的时间差,从而计算出目标物体与雷达系统之间的距离。
毫米波雷达通常采用脉冲波的方式进行测距,具有较高的分辨率和精度。
毫米波雷达的测距能力通常可以达到几十米到几百米,适用于不同的应用场景。
毫米波雷达通过利用毫米波频段的电磁波进行测量和探测,具有测
角、测速和测距等多种功能。
它在物流、交通、安防、军事等领域发挥着重要作用。
通过合理的设计和优化,毫米波雷达可以实现高精度、高分辨率的目标检测和跟踪,为各行业的应用提供了可靠的技术支持。
未来随着技术的进一步发展,毫米波雷达有望在更多领域展现其潜力和优势。