PDPS机器人虚拟调试--PS篇 第十八课 机器人走行轴的使用
- 格式:pdf
- 大小:824.49 KB
- 文档页数:4
机器人可编程动作说明书一、简介本说明书为机器人的可编程动作指南,旨在帮助用户了解机器人的动作程序以及如何进行编程。
通过按照以下步骤执行编程,用户可以使机器人实现各种不同的动作。
二、动作编程步骤以下是机器人动作编程的基本步骤:1. 创建动作程序首先,打开机器人控制软件,并选择“新建动作程序”选项。
在新建的动作程序中,用户可以为机器人定义一个独特的名称,并开始编写机器人的动作。
2. 选择动作在动作程序中,用户可以选择机器人现有的基本动作,如行走、伸展、旋转等。
每个动作都会有一个对应的编号和名称,用户可以根据需求选择适当的动作。
3. 参数调整对于每个选择的动作,用户可以根据需要进行参数的调整。
例如,可以调整机器人的速度、幅度、角度等参数,以适应不同的场景和要求。
4. 组合动作除了使用单个动作外,用户还可以将多个动作组合在一起,形成一个完整的动作序列。
通过添加、删除和调整顺序,用户可以定制机器人的动作序列,并实现更加复杂的动作表演。
5. 添加条件控制对于特殊需要,用户还可以通过添加条件控制来精确控制机器人的动作。
条件控制可以根据外部传感器的信号或用户的指令,使机器人按照特定的条件执行相应的动作。
6. 调试和测试在完成动作程序的编写之后,用户可以通过调试和测试来验证程序的有效性。
用户可以选择在虚拟环境中进行测试,或将动作程序上传到机器人设备上进行实际执行。
7. 保存和使用一旦动作程序经过测试没有问题,用户可以将其保存,并在需要时随时加载和使用。
用户还可以将动作程序导出为文件,以便与其他用户共享和交流。
三、常见问题解答以下是一些常见问题的解答,可以帮助用户更好地理解和应用机器人的可编程动作功能:1. 动作程序是否可以重复使用?是的,一旦用户创建并保存了动作程序,可以随时重新加载和使用。
用户还可以根据需要对动作程序进行修改和优化。
2. 是否可以同时执行多个动作程序?是的,机器人可以同时执行多个动作程序,并按照设定的顺序逐个进行。
机器人操作手册及使用指南(专业版)一、引言机器人已经成为现代社会不可或缺的一部分,为各行各业提供了许多便利。
本机器人操作手册及使用指南专为在机器人操作领域专业人士提供,旨在帮助各种机器人操作任务的顺利进行。
本手册将详细介绍机器人操作的基本原理、操作步骤以及常见问题的解决方案,以期为用户提供全面的指导和帮助。
二、基本原理1. 机器人分类机器人按照其用途和结构可以分为工业机器人、服务机器人、军用机器人等多种类型。
本手册主要关注工业机器人的操作方法和使用技巧。
2. 机器人工作原理机器人的工作原理包括感知、决策和执行三个主要步骤。
感知环节通过传感器收集环境信息,决策环节通过算法和逻辑进行任务规划和路径确定,执行环节通过执行器执行任务。
三、机器人操作步骤1. 准备工作在操作机器人之前,需要进行以下准备工作:- 确保机器人所需部件完好无损- 检查机器人的电源和供电设施是否正常- 确保机器人的控制器和程序运行正常2. 机器人启动根据具体机器人的型号和品牌,可通过以下步骤启动机器人:- 打开机器人的电源开关- 确保控制器与机器人正常连接- 检查机器人的各个节点是否在线3. 机器人操作根据具体任务需求,进行以下机器人操作:- 根据任务要求编写机器人控制程序- 将控制程序加载到机器人的控制器中- 启动机器人的执行任务4. 机器人沟通当机器人在执行任务时,可以通过以下方式与其进行沟通:- 利用机器人的语音交互系统进行语音指令- 利用机器人的触摸屏进行人机交互- 利用机器人的传感器进行姿态检测和互动五、机器人维护与故障排除1. 机器人维护为了确保机器人的正常运行,以下是一些常见的机器人维护注意事项:- 定期检查机器人的零部件是否磨损或松动- 清洁机器人的表面和传感器,避免灰尘和污渍影响机器人的工作效果- 定期校准机器人的传感器和执行器2. 故障排除在操作机器人过程中,可能会遇到各种故障,以下是一些常见故障及其解决方案:- 机器人不动:检查电源和电缆连接是否正常,检查控制器程序是否正确- 机器人动作异常:检查机器人的执行器是否正常,检查传感器是否损坏或松动- 机器人感知不准确:检查传感器是否干净,是否需要进行校准六、结论本机器人操作手册及使用指南(专业版)详细介绍了机器人操作的基本原理、操作步骤以及常见问题的解决方案。
机器人示教器操作说明一、设备介绍1.示教器主机:包含了控制系统和人机交互界面。
2.示教器手柄:用于手动控制机器人的运动,包含各种按钮和摇杆。
3.示教器屏幕:显示机器人的实时状态和控制界面。
4.示教器连接线:将示教器主机和机器人连接起来,传输指令和信号。
二、基本操作流程1.连接机器人:将机器人示教器主机与机器人的控制系统连接起来,确保电源连接正常。
2.打开示教器:按下示教器主机的电源按钮,示教器屏幕将显示系统启动画面。
3.选择模式:根据需要选择手动示教、自动示教或编程模式。
三、手动示教模式手动示教模式可以通过示教器手柄来手动控制机器人的运动,适用于简单的、实时的操作任务。
1.进入手动示教模式:在示教器主机上选择手动示教模式,示教器屏幕将显示手动控制界面。
2.设定机器人初始位置:将机器人运动到所需位置,按下手柄上的“记忆”按钮,将该位置保存为初始位置。
3.手动控制机器人运动:通过手柄上的按钮和摇杆控制机器人的运动,如前进、后退、左转、右转等。
4.停止示教:按下手柄上的“停止”按钮,机器人将停止运动。
四、自动示教模式自动示教模式可以通过示教器手柄模拟机器人的操作路径,将机器人的运动记录下来以后复现执行。
1.进入自动示教模式:在示教器主机上选择自动示教模式,示教器屏幕将显示自动示教界面。
2.设定机器人初始位置:将机器人运动到所需位置,按下手柄上的“记忆”按钮,将该位置保存为初始位置。
3.录制示教路径:按下手柄上的“记录”按钮,通过手柄模拟机器人的操作路径,机器人会记录下这些动作。
4.复现示教路径:按下手柄上的“执行”按钮,机器人将按照之前记录的示教路径进行执行。
5.停止示教:按下手柄上的“停止”按钮,机器人将停止运动。
五、编程模式编程模式可以通过示教器主机上的编程界面来编写和执行复杂的机器人操作程序。
1.进入编程模式:在示教器主机上选择编程模式,示教器屏幕将显示编程界面。
2.编写程序:使用示教器主机上的编程界面,根据机器人的运动逻辑和任务需求编写操作程序。
DTPS for GII 操作顺序概要1.生成设备链接启动G2PC工具文件→添加控制→设备链接<设备链接名>输入链接名输入<链接文档>输入保存数据的文档地址□选中新建=>单击“OK”2.设备的生成右键单击对象设备的链接→属性“添加设备”<设备名> 输入设备名称○指定新建<使用机器人台数>:1 => 单击“OK”生成设备。
→“是”2.更改、添加组或分类名(根据需要)双击设备名在各自缺省的内容中,单击“新建”,即可添加设备名;单击“变更”,即可修改设备名。
4. 设定机器人的参数右键单击设备名→属性→“编辑设备”机器人→属性机型、工具、外部轴、机构等设定这里以VR008为例5. 工件、设备部品的生成或读入“组”→“部品”→“新建”1) 单击图形按钮,生成要素(详见另外说明)2) 读取STL格式数据(详见另外说明)生成MESH(网状)选中读取的STL数据文件,并将其打开。
3) 读取IGES格式的数据(详见另外说明)文件→导入选择读取的IGES数据文件,并将其打开6. 生成外部轴(生成硬件)1) 生成双持回转倾斜变位机“组”→“外部轴”→“新建”I.指定基本图形(固定部分的图形)=指定相应部品=双击模块文件栏选择“标准”部品的Two Axes positioner (1) G-500 => “OK”II.添加外部轴①添加第一轴编辑→添加外部轴单击外部轴<01>指定轴的类型回转<V>指定正方向(+或-)指定外部轴坐标系的原点位置Z:540移动范围(指定最大、最小值)最小:-135 最大:135=指定第一轴所对应的图形部品=双击模块文件栏选择“标准”部品的Two Axes positioner (2) G-500 =>“OK”②添加外部轴的第二轴编辑→添加外部轴(外部轴<01>:选择状态)外部轴<02> 单击指定轴的类型回转<W>转动范围(指定最大、最小值)最小:-3600 最大:3600=指定第二轴相应的图形部品=双击模型文件栏选择“标准”部品的PANADICE G-500-TABLE =>“OK”=指定图形的配置=模型位置<Z>:210,模型位置<V>:-90III.保存外部轴文件→保存输入文件名=>“OK”完成变位机的生成文件→结束程序2) 生成平移装置“组”→“外部轴”→“新建”I.指定基础图形(固定部分的图形)双击模块文件栏选择Shift Base => “OK”II.添加外部轴=添加第一轴(移动轴)=编辑→添加外部轴单击外部轴<01>选择轴的类型移动<Y>移动范围(指定最大、最小值)最小:0 最大:2000指定移动轴相应的图形部品(双击模块文件栏)选择Shift Table =>“OK”III.保存外部轴文件→保存输入文件名=> “OK”完成平移装置文件→结束程序7.机器人外部轴的设定(软件的设定)双持回转倾斜变位机+平移装置的3个轴时的设定右键单击设备名→属性“编辑设备”机器人→属性(或双击R001-ROBOT)“外部轴”实际应用时,请根据实际的轴号来进行设定,这里暂且从No.1开始设定。
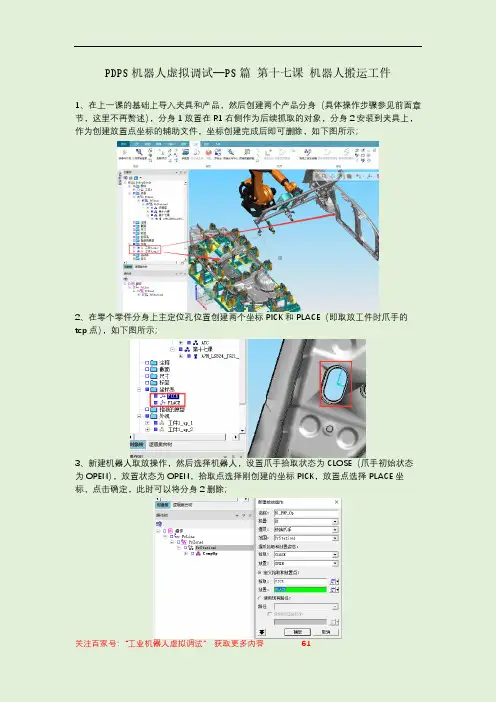
PDPS机器人虚拟调试--PS篇第十七课机器人搬运工件
1、在上一课的基础上导入夹具和产品,然后创建两个产品分身(具体操作步骤参见前面章节,这里不再赘述),分身1放置在R1右侧作为后续抓取的对象,分身2安装到夹具上,作为创建放置点坐标的辅助文件,坐标创建完成后即可删除,如下图所示;
2、在零个零件分身上主定位孔位置创建两个坐标PICK和PLACE(即取放工件时爪手的tcp点),如下图所示;
3、新建机器人取放操作,然后选择机器人,设置爪手拾取状态为CLOSE(爪手初始状态为OPEN),放置状态为OPEN,拾取点选择刚创建的坐标PICK,放置点选择PLACE坐标,点击确定,此时可以将分身2删除;
4、将刚创建完成的机器人取放操作加载到路径编辑器窗口,然后添加机器人当前位置为Home位置点,点击播放按钮查看机器人取放动作,如下图所示;
5、参考前面的章节添加机器人取放路径过度点,完成后点击播放按钮查看机器人整个取放路径动作,保存、退出。

工业机器人应用一机器人示教单元使用1.示教单元的认识2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。
再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。
按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。
各轴对应动作方向好下图所示。
当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。
2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4在手动运行模式下按“HAND”进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT-900”和“OUT-901”按键“+B”和“-B”对应“OUT-902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT-905”按键“+Z”和“-Z”对应“OUT-906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。
对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。
3.使用示教单元设置坐标点3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列:J1:0.00 J5:0.00J2: -90.00 J6:0.00J3:170.00J4:0.003.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。
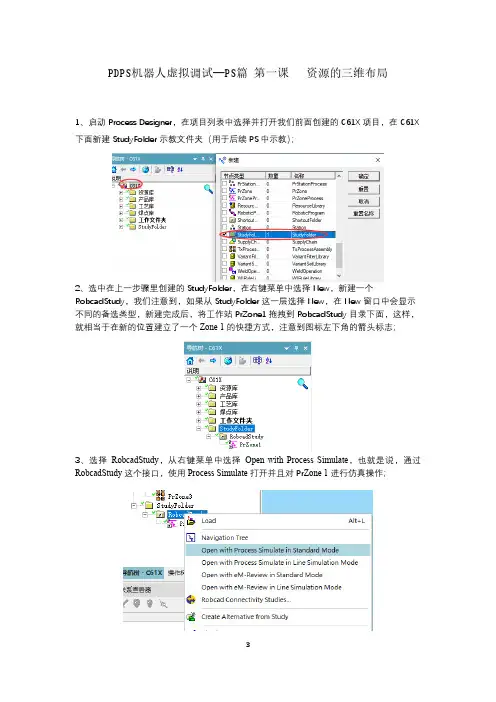
PDPS机器人虚拟调试--PS篇第一课资源的三维布局1、启动Process Designer,在项目列表中选择并打开我们前面创建的C61X项目,在C61X 下面新建StudyFolder示教文件夹(用于后续PS中示教);2、选中在上一步骤里创建的StudyFolder,在右键菜单中选择New,新建一个RobcadStudy,我们注意到,如果从StudyFolder这一层选择New,在New窗口中会显示不同的备选类型,新建完成后,将工作站PrZone1拖拽到RobcadStudy目录下面,这样,就相当于在新的位置建立了一个Zone 1的快捷方式,注意到图标左下角的箭头标志;3、选择RobcadStudy,从右键菜单中选择Open with Process Simulate,也就是说,通过RobcadStudy这个接口,使用Process Simulate打开并且对Pr Zone 1进行仿真操作;4、Process Simulate和Process Designer的工作窗口非常类似,操作方式也很接近,同样在PS也可以进行三位布局的调整,操作方法同PD中的操作,这里不再赘述如下图,在左侧的对象树中列出与PrZone 1相关的零件和资源等;5、如下图所示,零件一栏显示的是单独的零件,并未显示分组(PD中进行了分组),这是因为在PD中零件分配到工位的过程中直接拖拽零件到工位,若是拖拽零件的分组JIG1和JIG2到工位,则此处也会出现分组,这里需要重新分组;6、选中零件,选择建模、创建复合零件(数量4个);7、创建完成修改名称并分组,如下图;8、所有资源位置调整完成后,选择左上角eMServer Selective Update(更新eMServer),保存我们前面的所有修改和设置(或者在服务器中选择此命令);9、因为我们对零件(包括已经关联的焊点)、资源进行了修改,所以在保存类型中需要勾选零件、资源和操作,成功保存之后,退出Process Simulate;10、the end。
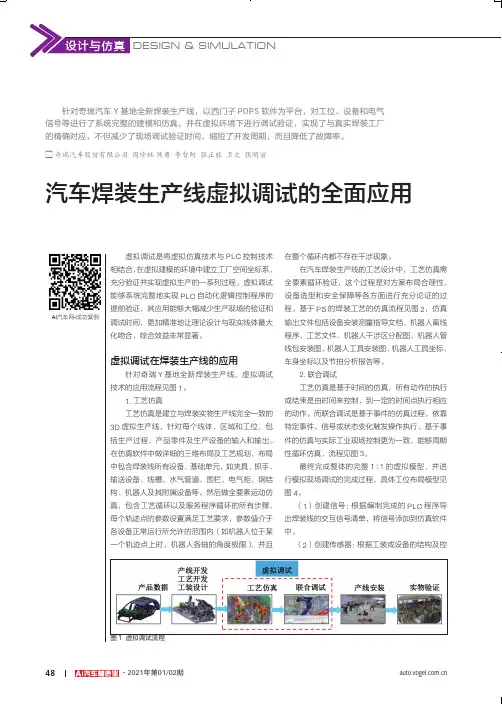
AI汽车网-成功案例图1 虚拟调试流程・2021年第01/02期图2 工艺仿真流程图3 联合调试流程图4 具体工位布局模型图5 安装精度控制492021年第01/02期・设计与仿真DESIGN & SIMULATION50 ・2021年第01/02期广告上海新国际博览中心 W1-W5, E1-E3馆2021.07.07-10相聚AMTS 2021即刻扫码预定展位上海国际汽车制造技术与装备及材料展览会Shanghai International Automotive Manufacturing Technology & Material Show汽车工程行业盛会车“智”造 | 未来汽车开发汽车开发 | 新型能源 | 商用车工程置调试、变频器参数调试等,具体工作内容如下:正确加载RCS模块和“Machinedata ”;主程序对子程序调用逻辑是否合理;机器人I/O 信号与电气规划一致;正确使用Tool/UseFrame 及路径点参数设置;机器人运行轨迹最优满足工艺需求;机器人干涉区无问题。
由于虚拟调试已经验证了程序逻辑,所以单设备、单工位和工位联动逻辑基本无需修改。
总结虚拟调试在汽车焊装生产线的全面应用,印证了项目策划阶段虚拟调试策略的成果显著;在这个过程中,我们也不断地进行探索,以期望更加高效、精准且快速地进行项目开发,使新产品快速导入市场,增加竞争力。
如图6所示,运用虚拟调试比传统生产线规划具有以下优点:缩短了现场调试周期,减少停产时间;相比传统方式,减少现场调试时间1/3;保证机器人焊点质量;在办公室即可完成调试,对现场工程师的技能要求降低;降低了调试成本;在虚拟环境中测试程序,验证干涉区,降低了碰撞事故与风险。
图6 虚拟调试应用对比∆t广告。
工业机器人软件中的工具、工件坐标系操作步骤
工具坐标系的建立步骤:
1、AB B→手动操纵→坐标系选择“基坐标”→点击“工具坐标”→新建→数据声明表:名称(tool)、范围(任务)、存储类型(可变量)、任务(T-ROB1)、模块,→确定
2、光标选中新建的名称tool→编辑→更改值→修改重量mass、重心坐标cog的x、y、z值→确定
3、光标选中新建的名称tool→编辑→定义→方法(TCP和Z、X)、点数(4点)→调节关节轴,分别选中点1、2、3、
4、X、Z对好位置,点击修改位置→确定
4、重定位操作:AB B→手动操纵→动作模式选择“重定位”、坐标系选择“工具”→点击“工具坐标”选择刚建好的工具坐标系“tool →操作摇杆。
工件坐标系的建立步骤:
1、AB B→手动操纵→坐标系选择“基坐标”→点击“工件坐标”→新建→数据声明表:名称(wobjl)、范围(任务)、存储类型(可变量)、任务(T-ROB1)、模块,→确定
2、光标选中新建的名称wobjl→编辑→定义→用户方法:3点:用户点X1为原点、用户点X2为X轴正方向上的点、用户点Y1为Y 轴正方向上的点,分别选中点,修改位置→确定。
工业机器人操作基础-工业机器人轴和坐标系概述
继上一阶段我们学习了《工业机器人编程》之后,本阶段我们来介绍《工业机器人操作基础》,因为现在工业机器人厂家众多,不能都一一介绍,本次主要以国产新松机器人(六轴)作为分析和介绍对象来进行说明,第一章我先介绍《工业机器人轴和坐标系概述》:
一、工业机器人轴的定义
1、工业机器人轴可以为旋转轴也可以为平移轴,轴的运行方式由机械结构决定。
2、工业机器人轴分为机器人本体的运动轴和外部轴。
3、工业机器人外部轴又分为滑台和变位机。
4、如果不特别指明,工业机器人轴即指机器人本体的运动轴。
关节坐标系示意图
二、机器人坐标系的种类
在示教模式下,机器人轴运动方向与当前选择的坐标系有关。
新松机器人支持4 种坐标系:关节坐标系、直角坐标系、工具坐标系、用户坐标系。
1、关节坐标系:机器人各轴进行单独动作,称为关节坐标系。
2、直角坐标系:机器人的控制中心点沿设定的X、Y、Z 方向运行。
3、工具坐标系:工具坐标系位于机器人腕法兰盘的夹具上,由用户自己定义。
夹具的有效方向定义为工具坐标系的Z 轴。
4、用户坐标系:用户坐标系位于机器人抓取的工件上,由用户自己定义。
三、工业机器人参考示意图:
本章结束到此结束,下一章我们将介绍《工业机器人关节坐标系》,敬请期待!同时我们将会把这些内容整理成电子书《工业机器人操作基础》需要的朋友可以联系我,我免费发送给大家。
PDPS仿真教程PS基础篇第9节机器人和夹具最佳位置选择
PDPS工业机器人虚拟调试仿真PS基础教程,机器人和夹具最佳位置选择,类似于Delmia中机器人自动放置功能:
1、智能放置:选中焊接操作(图中1),然后选择菜单栏中机器人一栏下面的智能放置命令(图中2),如下图所示;
2、设置放置范围:在智能放置对话框中,首先进行放置范围的设定,如下图所示设置Z向范围,层数为8层,完成后点击OK按钮;
3、图中1是选择机器人,对机器人位置进行智能选择;图中2是选择夹具,对夹具位置进行智能优化,3位置列表是需要焊接的焊点,4位置是干涉检查;。
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式一.示教操作盘面板介绍示教操作盘是主管应用工具软件与用户之间的接口的操作装置。
示教操作盘经由电缆与控制装置内部的主CPU印刷电路板和机器人控制印刷电路板连接。
示教操作盘在进行如下操作时使用。
●机器人的JOG进给●程序创建●程序的测试执行●操作执行●状态确认示教操作盘由如下构件构成。
●横向40字符、纵向16行的液晶画面显示屏●61个键控开关●示教操作盘有效开关●Deadman开关●急停按钮1.示教操作盘有效开关在盘左上角,如右图所示:其将示教操作盘置于有效状态。
示教操作盘处在无效状态下,不能进行JOG进给、程序创建和测试执行等操作。
2.Deadman开关在盘背面,如右图所示两黄色键:示教操作盘处在有效状态下松开此开关时,机器人将进入急停状态。
3.急停按钮在盘右上角,如右图所示红色键:不管示教操作盘有效开关的状态如何,都会使执行中的程序停止,机器人伺服电源被切断,使得机器人进入急停状态。
示教操作盘的键控开关,由如下开关构成。
●与菜单相关的键控开关●与JOG相关的键控开关●与执行相关的键控开关●与编辑相关的键控开关1.与菜单相关的键控开关:1.)、、、、功能( F )键,用来选择液晶画面最下行的功能键菜单。
2.)翻页键将功能键菜单切换到下一页。
3.)、MENU(画面选择)键,按下,显示出画面菜单。
FCTN(辅助)键用来显示辅助菜单。
4.)、、、、、、、、SELECT(一览)键用来显示程序一览画面。
EDIT(编辑)键用来显示程序编辑画面。
DATA(数据)键用来显示寄存器等数据画面。
OTF键用来显示焊接微调整画面。
STATUS(状态显示)键用来显示状态画面。
I/O(输入/输出)键用来显示I/O画面。
POSN(位置显示)键用来显示当前位置画面。
PDPS 机器人虚拟调试--PS 篇 第十八课 机器人走行轴的使用
1、接着上一讲,我们导入R1_走行轴模型(走行轴的创建类似前面章节外部轴的创建,这里就不在讲述),如下图所示;
2、选中走行轴,打开重定位命令对话框选择走行轴上Robot_Base 坐标和机器人底部的
Base 坐标,点击应用如下右图;
3、选中走行轴,打开放置操控器对话框,参考坐标系选择走行轴的base 坐标,然后Rz 旋转90°,结果如下图所示;
禁止盗版
发布
禁止盗版
发布
乐
语人
生
4、选中机器人R1,然后点击附加命令将R1附加到走行轴的k2组件上面,如下图所示;
5、选中机器人R1,右键打开机器人属性对话框(或者从工具栏中机器人一栏下面选择),选择外部轴点击添加,弹出对话框设备后面选择R1_走行轴,确定;
6、接下来我们将板件分身1向X 向移动3000,如下图所示;
7、下面创建机器人行走操作,选择通用机器人操作命令,选择机器人R1,确定;
禁止盗版
发布
禁止盗版
发布
乐
语人
生
8、将R1取件操作添加到路径编辑器窗口中,添加当前位置为放件位置,然后走行轴移动到-3000位置添加取件位置,如下图所示;
9、我们将上一课创建好的机器人取放操作复制一个,并分别命名为R1取件动作和R1放
件动作,并将两个路径中多余的点位删除,然后将R1取件动作下面所有的点位向X 负向移动3000(工件也是移动了3000)。
然后将R1行走操作也复制一个并调整程序点顺序,完成后如下图所示;
10、接下来设置所有程序点外部轴的数值,点击设置外部轴值命令,取件位置所有的点外部轴数值为-3000,放件位置所有的点外部轴数值为0;
禁止盗版
发布
禁止盗版
发布
乐
语人
生
11、将PrStation1设置为当前操作,打开序列编辑器窗口,选中4个操作然后点击链接,如下4个操作将按顺序链接、点击播放查看所有动作,保存、退出;
禁止
盗
版
发
布
禁
止
盗
版
发
布
乐语
人
生。