逆向工程中点云数据去噪算法的研究
- 格式:pdf
- 大小:128.30 KB
- 文档页数:2
3d打印逆向工程实训报告3D打印是逆向工程系统的重要子系统。
逆向工程,也称反求工程,或者称为反向工程,其思想最初来源于从油泥模型到产品实物的设计过程,即将实物模型转化为CAD模型的数字化、几何模型优化的过程,进而将实物模型转化为工程设计概念模型。
具体来说,逆向工程技术就是对实物原形进行3D扫描、数据采集,经过数据处理、三维重构等过程,构造具有相同形状结构的三维模型。
然后,再对原形进行复制或在原形的基础上进行再设计,实现创新。
所以说逆向工程并不是简单的3D扫描以及复制的过程,逆向工程的目的是利用实物获取点云,并基于点云进行优化设计以及创新设计。
该技术已经被广泛的应用于汽车,模具制造,家具,工业检测,动漫娱乐,考古文物保护,航空航天领域,生物医学制造,建筑和艺术等领域。
3D打印逆向工程实训报告一、实训目的本次实训旨在让我们深入了解和掌握3D打印逆向工程的基本流程和技术要点,通过实际操作提升我们的实践能力和问题解决能力。
二、实训内容数据采集:使用3D扫描仪对选定的实体对象进行扫描,获取其表面的点云数据。
在这个过程中,我们学习了如何调整扫描仪的参数以获得更高质量的点云数据。
数据处理:将扫描得到的点云数据导入到专业的逆向工程软件中,进行去噪、简化、修复等处理。
这一步是确保后续模型重建质量的关键。
模型重建:基于处理后的点云数据,利用软件中的曲面重建功能,构建出实体对象的三维模型。
在这个过程中,我们学习了如何选择合适的曲面重建方法,并对重建结果进行优化。
模型输出与3D打印:将重建好的三维模型导出为STL格式,并导入到3D打印机中进行打印。
在打印过程中,我们学习了如何设置打印参数以获得最佳的打印效果。
三、实训过程与遇到的问题在实训过程中,我们按照上述流程逐步完成了从数据采集到模型输出的整个过程。
其中,遇到了以下主要问题:数据采集不全:在初次扫描时,由于参数设置不当,导致部分区域的数据采集不全。
后来通过调整扫描仪的位置和参数,成功解决了这一问题。
点云去噪的文献综述
点云去噪是计算机视觉和计算机图形学领域的一个重要问题,其目标是从带有噪声的点云数据中恢复出平滑和准确的表面模型。
在许多应用中,点云数据可能受到传感器噪声、采样和重建过程中的误差等因素的影响,因此去噪成为了点云处理的基础任务。
近年来,研究者们提出了许多点云去噪的方法,这些方法可以分为基于几何的和基于学习的方法。
基于几何的方法主要利用点云的几何属性来进行去噪,包括点的法向量、曲率等。
其中,最常用的方法是基于高斯曲率的方法,它通过对点云进行曲率估计来去除噪声点。
此外,还有基于法向量的方法,它利用点的法向量信息来判断点是否为噪声点,并进行去除。
基于学习的方法则利用机器学习技术,通过训练模型来学习点云的特征和噪声分布,进而进行去噪。
这些方法通常采用自编码器、卷积神经网络等深度学习模型来实现。
通过学习点云的局部和全局特征,这些方法能够有效地去除噪声,并恢复出平滑的表面模型。
除了基于几何和学习的方法外,还有一些其他的点云去噪方法,如基于统计的方法、基于滤波的方法等。
这些方法通过利用点云的统计特性、滤波算法等来进行去噪。
其中,基于统计的方法通过分析点云的统计分布来去除噪声,并恢复出平滑的表面模型。
而基于滤波的方法则通过应用不同的滤波算法来去除噪声点。
点云去噪是一个重要且具有挑战性的问题。
研究者们提出了许多不同的方法来解决这个问题,这些方法可以分为基于几何的、基于学习的、基于统计的和基于滤波的方法。
这些方法各自有其优势和适用范围,可以根据具体应用场景选择合适的方法。
希望未来的研究能够进一步提高点云去噪的效果和速度,为点云处理和应用提供更好的支持。
点云数据去除噪声的原理点云数据去除噪声是点云处理中的一个重要步骤,目的是从点云数据中过滤掉不需要和无意义的点,以得到更加干净和准确的点云信息。
去除噪声对于后续的点云分析、物体识别、建模和导航等任务至关重要。
点云数据通常是通过三维扫描仪、立体相机和激光雷达等设备获取的,这些设备在采集过程中可能会受到各种干扰和噪声的影响。
噪声主要来源于传感器偏差、环境条件、运动振动等因素。
噪声的存在会导致点云数据中出现离群点、嵌入点、重复点以及不完整的点等问题。
因此,点云数据去噪的目标是尽可能保留有效信息,同时去除尽量多的噪声。
点云数据去除噪声的方法有很多种,可根据噪声的特点和应用需求选择合适的方法。
下面将介绍一些常用的点云去噪方法及其原理。
1. 空间滤波:空间滤波是最常用的点云去噪方法之一。
空间滤波基于点的坐标信息,通过计算点与其邻域点之间的距离来判断是否为噪声点。
常见的空间滤波方法有高斯滤波、中值滤波和统计滤波等。
其中,高斯滤波通过计算点与邻域点的平均距离来滤除与周围点相距较远的离群点;中值滤波通过计算邻域点的中值来滤除强度不平衡的嵌入点;统计滤波通过设置一个阈值,去除与邻域点的标准差超过阈值的点。
2. 法向量滤波:法向量滤波是基于点云的几何形状信息进行去噪的方法。
法向量是指点云某点表面的法线方向,可以通过计算点云中的邻域点来估计。
法向量滤波通过比较点与法向量之间的夹角来判断是否为噪声点。
一般来说,表面平坦的区域具有一致的法向量,而噪声点的法向量与周围点存在较大差异。
通过计算点与其邻域点的夹角,可以将法向量与周围点差异较大的点认为是噪声点,并进行去除。
3. 网格滤波:网格滤波是一种基于网格数据结构的点云去噪方法,其原理是将点云数据投影到一个二维网格上,通过对网格内的点进行处理来去除噪声。
网格滤波中的一个常见方法是统计离群值滤波(Statistical Outlier Filtering,即SOR),该方法通过计算点与邻域点的距离和标准差来判断是否为噪声点,并进行过滤。

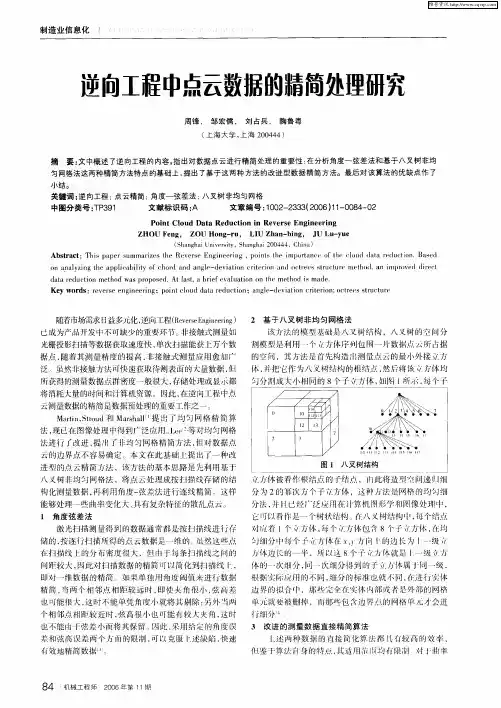
对逆向工程技术的点云数据处理的研究摘要:几何造型与处理是国际上当前的研究热点,逆向工程技术作为其中一门重要的建模方法,在实际生产生活中有多方面的应用。
简单介绍了逆向工程技术中点云数据的概念,实际操作流程,指出了点云数据处理是逆向过程中不可缺少的一步;重点讲述了点云数据处理的数学模型,数据处理方法,最后通过深入浅出的例子总体表现逆向工程技术。
关键词:逆向工程catia matlab 点云数据消噪平滑滤波点云分层数据拼合精简中图分类号:tp39 文献标识码:a 文章编号:1007-3973(2012)005-008-021 逆向工程技术点云数据概述点云数据是逆向过程中通过三维测量机测出的保留有模型坐标尺寸信息的数据。
由于受一些外界条件还有测量工具等等,点云数据中含有部分的噪声点和大量的冗余的数据,不利于模型的重构,影响模型的质量,所以逆向过程中点云数据处理是不可缺少的,它是模型重构前所必须做的。
2 逆向工程技术的数据处理模型2.1 噪声点的去除和失真点的查找在三维扫描测量过程中,由于测量设备精度不一样、所测量的物体的性质差异、所处外界环境的约束,从而很容易而且不可避免地存在噪声点和失真点。
因此在逆向测量过后的数据处理,就首先要用相关的软件对点云数据进行处理,去除那些误差很大的噪声点和失真点。
主要有以下几种方法:(1)直接观察法,去除那些直接能观察出来的噪声点和失真点,然后删除。
(2)弦高差法,连接检查点前后两点,计算检查点到连线(弦)的距离,如果 (为给定的允差),则认为是坏点,应予以去除。
(3)角度判断法,检查点沿扫描线方向与前后两点形成的夹角是否小于允许值。
(4)曲线检查法,用最小二乘法拟合得到一条spline曲线,曲线通过截面的首末点,曲线的阶次可以根据曲面具体改变,然后分别计算中间数据点到spline曲线的距离,如果(为给定的允差),则认为是坏点,去除该点。
2.2 点云数据的平滑处理点云数据的平滑处理是逆向工程模型重构不可缺少的环节,因为点云数据有很大的随机性误差,而且误差很容易累计传递,这对于后期的重构曲面的质量有很大的影响,因此重构曲面之前要对点云数据进行平滑滤波处理,主要的平滑滤波处理方法有以下几种:均值滤波,利用统计平均值,代替原点,使数据光滑,达到平滑处理的效果。
点云去噪方法点云去噪是三维点云处理中的一项重要任务,目的是消除测量误差、场景干扰、仪器噪声等对点云数据的影响,以提高点云数据的质量。
点云去噪方法可以分为基于几何、基于统计学和深度学习等不同类型。
本文将介绍一些常见的点云去噪方法。
基于几何的方法:1. 体素滤波体素滤波是点云去噪中最简单和最常见的方法之一。
该方法基于体素的概念,将三维空间分割为小立方体,称之为体素(voxel)。
体素内部的点云数据通过计算统计值,如平均值或中位数,来替换原有的点云数据,以达到去噪的目的。
体积较小的体素适合去除噪声,而体积较大的体素适合保留点云的结构信息。
2. 泊松重建泊松重建是一种基于光滑重建的点云去噪方法。
该方法将待处理的点云数据作为输入,并通过计算出点云数据之间的距离,来建立一个网格模型。
然后,利用泊松拟合算法对点云数据进行处理,减少点云数据中的噪声。
统计滤波是基于点云数据的统计摘要信息的方法。
该方法使用局部领域内的点来计算统计数据,如均值和标准差。
然后,将极端值设为异常值并去除。
这种方法适用于比较光滑的表面,但对于包含细节的表面可能会出现失真。
2. 基于法向量的方法基于法向量的方法是指利用法向量来处理点云数据。
该方法通过计算点的法向量与周围邻居法向量的差异来检测异常值,并使用平滑算法进行处理。
这种方法适用于粗糙表面的去噪,对于平滑表面可能会失效。
深度学习方法:基于深度学习的方法是一种较新的点云去噪方法。
它使用深度神经网络来构建点云数据的特征表示,然后通过反向传播算法来优化网络参数,从而减少噪声的影响。
该方法由于需要大量数据训练,因此需要大量的点云数据和计算资源。
2. 自编码器自编码器是一种无监督的深度学习模型,用于学习数据的特征表示。
该方法通过编码器来将点云数据压缩为向量,然后通过解码器将其重构回原始状态。
自编码器可以提供一种无需标注数据的点云去噪方法。
总结:点云去噪方法有多种类型,每种方法都有其优缺点和适用范围。
逆向工程中的点云处理逆向工程是一种通过对现有产品进行反向分析,提取和理解其设计、构造和材料等关键信息,进而实现复制、改进或再设计的过程。
在逆向工程中,点云处理是一项非常重要的技术,它涉及到对大量三维坐标数据的采集、预处理、编辑、优化等一系列操作。
本文将详细介绍逆向工程中的点云处理流程及相关技术,并通过案例分析说明其实际应用。
一、点云处理流程1、数据采集点云数据采集是逆向工程的第一步,通常通过三维扫描技术实现。
三维扫描仪可以将物体表面的形状、颜色、纹理等转化为三维坐标数据,为后续的点云处理提供基础数据。
2、数据预处理采集到的点云数据往往存在噪声、冗余数据等问题,因此需要进行预处理。
预处理主要包括数据过滤、降噪、简化等操作,以去除无用信息和改善数据质量。
3、数据编辑在数据预处理之后,需要对点云数据进行编辑以更好地反映物体表面的特征。
编辑操作包括插入、删除、移动点等,以便于更好地表达物体的几何形状和特征。
4、数据优化需要对编辑后的点云数据进行优化,以方便后续的分析和处理。
优化操作主要包括数据分组、网格化、平滑等,以提高数据处理的速度和准确性。
二、关键技术介绍1、点云数据采集技术点云数据采集技术是逆向工程的关键之一,常用的方法包括激光扫描、结构光扫描、断层扫描等。
这些方法的基本原理是利用相应的设备对物体表面进行扫描,获取其表面形状和结构的三维坐标数据。
2、点云数据处理技术点云数据处理技术包括数据预处理、编辑和优化等多个环节,涉及到的技术包括统计方法、几何方法、网格处理等。
这些技术可以对点云数据进行清洗、过滤、降噪、简化等操作,以提高数据质量和处理效率。
三、案例分析本部分将通过一个具体的案例来说明逆向工程中点云处理的实际应用。
本案例中,我们将对一个具有复杂曲面形状的汽车覆盖件进行逆向工程分析。
1、数据采集首先,使用激光扫描仪对汽车覆盖件进行扫描,获取其表面形状和结构的三维坐标数据。
在扫描过程中,需要注意扫描的角度、位置、分辨率等因素,以保证获取数据的准确性和完整性。
点云数据处理及应用研究点云数据是一种在三维场景中获取的数据类型,可以描述物体的形状,大小,位置和方向等信息。
在现代计算机视觉应用中,点云数据处理被广泛应用于三维重建,建模,目标检测和识别等领域。
点云数据的获取通常通过激光雷达,3D摄像头或者其他3D扫描设备来实现。
获取到的点云数据通常是由大量的点构成的,每个点都包含了位置和其他相关信息,比如颜色和反射率等。
点云数据处理是将点云数据进行一系列计算和分析,从而得到场景中目标物体的信息。
其中包括点云数据去噪、分割、配准、特征提取、网格化、曲率分析、光照估计等一系列操作。
去噪是点云处理的第一步,由于激光雷达或者摄像头的噪声以及视场中的杂物等因素导致采集到的点云数据含有噪声。
去噪的策略包括滤波,曲面拟合等。
其中比较常用的滤波算法有高斯滤波,滑动窗口滤波和中值滤波等。
点云分割是将点云数据划分成多个部分的一种操作,它能将点云数据拆分成不同的部分,从而得到分割后的子点云数据。
分割的策略包括迭代最近邻算法,欧几里得聚类算法和基于区域生长的算法等。
配准是指将多个点云数据融合成一个完整的模型。
它包括点云数据配准和扫描型图像配准,可以通过检测两组点云之间的相似性来达到跨越不同场景的目的,从而建立三维场景模型。
点云数据的特征提取是一种用于描述物体形状和几何特征的方法,可以将点云数据转化为可识别的特征向量,包括法线方向,曲率,表面特征以及关键点等。
点云网格化是将点云数据转化成三角形网格表面的过程,它能够得到更稳定,更容易可视化和处理的数据类型,但同时会导致一定程度的数据损失。
曲率分析是指针对点云数据上网格的曲率进行分析,以预测曲率半径或者曲率半径变化的特征。
光照估计是指在没有照明信息的条件下估计点云数据的表面光泽度和反射率等属性,以得到更为真实和精确的场景表达。
点云数据处理的应用包括三维建模,环境和交通监测,文化遗产保护和虚拟现实等领域。
总结本文介绍了点云数据处理的方法和应用。
逆向工程关键技术研究及应用摘要:逆向工程是一项计算机辅助设计的新技术,它是在现有产品数字化基础上进行设计创新的,其关键技术主要包括:实物数字化、数据预处理、三维模型重建等。
本文总结了国内外的逆向工程技术研究现状,对其关键技术进行了研究,并概括了目前逆向工程在设计中的应用情况,最后对逆向工程存在的问题进行了讨论。
一、绪论计算机辅助设计指利用计算机及其图形设备帮助设计人员进行设计工作,简称CAD。
在工程和产品设计中,计算机可以帮助设计人员担负计算、信息存储和制图等各项工作。
在设计中通常要用计算机对不同方案进行大量的计算、分析和比较,以决定最优方案;各种设计信息,不论是数字的、文字的或图形的,都能存放在计算机的内存或外存里,并能快速地检索;设计人员通常用草图开始设计,将草图变为工作图的繁重工作可以交给计算机完成;由计算机自动产生的设计结果,可以快速作出图形显示出来,使设计人员及时对设计作出判断和修改;利用计算机可以进行与图形的编辑、放大、缩小、平移和旋转等有关的图形数据加工工作。
CAD能够减轻设计人员的劳动,缩短设计周期和提高设计质量。
作为计算机辅助设计的一项具体应用,逆向工程是近些年发展起来的消化、吸收先进技术的一系列分析方法及应用价值的组合。
传统的正向设计从实际需求出发得出产品的概念,进一步建立与之相符的CAD模型,通过一系列手段得到产品的实物模型。
相对于传统正向设计,逆向工程的过程采用了通过测量实际物体的尺寸并将其制作成CAD模型的方法,真实的对象可以通过如三坐标测量仪(Coordinate Measure Machine,CMM),激光扫描仪,结构光源转换仪或者x射线断层成像这些3D扫描技术进行尺寸测量,然后通过后续处理进而得到3D模型。
概括地说,逆向工程是由产品样件到数字化模型的过程,相比于传统的正向设计,1它极大地缩短了产品的开发周期,提高了经济效益。
二、研究现状逆向工程是20世纪80年代初由日本名古屋研究所、美国3M公司和美国UVP公司提出并研制开发的[1]。
基于CATIA的逆向工程点云定位方法研究逆向工程在汽车设计领域是一种重要且常用的设计手段,在产品造型、型面制作和结构布置设计等阶段发挥着重要的作用。
而逆向工程的主要依据是通过扫描手段得到的点云数据。
由于点云所处的坐标系统与设计参考坐标系没有任何关联,因此还需要对点云进行定位和调整。
目前通常以......一、引言逆向工程在汽车设计领域是一种重要且常用的设计手段,在产品造型、型面制作和结构布置设计等阶段发挥着重要的作用。
而逆向工程的主要依据是通过扫描手段得到的点云数据。
由于点云所处的坐标系统与设计参考坐标系没有任何关联,因此还需要对点云进行定位和调整。
目前通常以目视和简单测量的方法调整点云坐标到所需的设计坐标系统,因此导致设计效率低下,人为增大设计误差。
本文另辟蹊径,运用CATIA软件独有的罗盘工具,设置定位调整条件,可以方便地将点云数据调整到所需的设计坐标系中,为整个开发进程提供可信的数据基础。
点云的定位与调整方式主要有非参数化和参数化两种方法。
为了详细阐述这两种方法的使用,本文从利用相关件进行点云定位,和设定自对称件的对称中心面两方面进行实例说明。
为了更好地理解本文的内容,特对涉及的术语做如下说明:◎点云:通过扫描设备采集对象物体的表面几何信息时,产生用来表达表面几何信息的点的集合。
◎自对称件:将本身的一部分特征关于特定平面对称时,对称产生的特征能与本身其他的特征基本重合的物体。
◎罗盘:CATIA软件的自带工具,用来指示坐标系并在6个自由度方向上自由调节。
◎基准平面:此文中特指CATIA中生成的Plane面,具有无限延展性的单阶面。
二、非参数化的点云定位方法点云的定位与调整的非参数化方式主要是将CATIA中的罗盘与点云数据关联起来,通过调整罗盘的方位数据来移动点云数据,并且配合对点云位置的判定,从而实现点云的定位与调整。
1.利用相关件进行点云定位此类应用前提是必须有在现有坐标系中与待定位部件相关的部件数模(或者已知某特征的坐标值)。
点云数据处理与重建算法研究随着三维扫描技术的发展和应用的广泛,点云数据成为了获取和表示三维场景的重要手段。
点云数据是由大量的离散点组成的,每个点包含了位置、颜色等信息,它们可以从激光雷达、摄像机等传感器获取。
然而,由于采集过程中噪声、遮挡和运动等因素的影响,获取的点云数据往往存在着缺失、冗余和杂乱的问题。
因此,点云数据的处理与重建算法研究变得尤为重要。
点云数据的处理涵盖了点云的预处理、去噪、滤波、分割等一系列操作,旨在消除噪声、提取有用的信息和结构特征。
预处理包括对采集到的传感器数据进行合理的校正和坐标变换,以确保点云数据的准确性和一致性。
对于密集点云数据,常用的预处理操作包括采样和降采样等,以减少数据量并保留数据的特征信息。
去噪和滤波算法则通过分析点云的特征、形状和分布情况,对噪声进行有效的过滤,以克服传感器误差、运动模糊等因素引入的噪声干扰。
分割算法则通过对点云数据进行区域划分,提取出目标物体的几何特征和拓扑结构。
点云数据的重建是指通过有限的离散点集合来恢复或还原原始三维场景的外形和结构。
主要有基于曲面重建、体素重建和深度学习等方法。
基于曲面重建的算法通常通过将点云数据拟合为连续的曲面,来重建出三维物体的几何形状。
这种方法适用于稀疏点云数据,可以有效处理不规则形状的物体。
而基于体素重建的算法则将点云数据转化为体素表示,通过体素块之间的关系进行插值和填充,重建出三维场景的粗糙结构。
这种方法适用于密集点云数据,可以较好地保留物体的细节信息。
近年来,深度学习在点云数据处理与重建领域也取得了突破性的进展。
深度学习技术可以学习点云数据的内在特征表示,通过构建神经网络模型,实现对点云数据的语义分割、分类和重建。
例如,PointNet是一种基于神经网络的点云处理方法,它可以直接接受点云数据作为输入,无需进行预处理或重建,从而省去了繁琐的处理步骤,更加高效和准确。
除了点云数据的处理与重建,还有许多相关的研究方向值得深入探索。
点云模型的噪声分类去噪算法李鹏飞;吴海娥;景军锋;李仁忠【摘要】针对三维点云模型数据在去噪平滑过程中存在的不同尺度噪声和算法计算耗时问题,提出了点云模型的噪声分类去噪算法。
该算法根据噪声点分布特性,将其分为大尺度和小尺度噪声,先利用统计滤波结合半径滤波去除大尺度噪声;然后使用快速双边滤波对小尺度噪声进行平滑,实现点云模型的去噪和平滑。
与传统的双边滤波相比,利用快速双边滤波对点云模型数据进行平滑,有效地提高了计算效率。
实验结果表明,该算法对点云噪声进行快速平滑去除的同时又能有效地保持被扫描物体的几何特征。
%Aiming at the problems that different scale noise exists in denoising and smoothing of 3D point cloud data and time consuming of algorithm, the denoising algorithm for point cloud data based on noise classification is proposed. According to the distribution characteristics, the noise points are divided into large-scale and small-scale noise. Firstly, the large-scale noise is removed by statistical filtering and radius filtering. Then the small-scale noise is smoothed with fast bilateral filtering. Finally, the purpose of denoising and rapid smoothing for 3D point cloud data are achieved. Compared with the traditional bilateral filtering, the computing efficiency is improved using fast bilateral filtering to smooth the point cloud data. The experimental results show that the proposed algorithm can fast denoise and smooth for 3D point cloud data, which can effectively maintain the geometric features of the scanned object.【期刊名称】《计算机工程与应用》【年(卷),期】2016(052)020【总页数】5页(P188-192)【关键词】点云去噪;快速双边滤波;统计滤波;条件滤波;平滑【作者】李鹏飞;吴海娥;景军锋;李仁忠【作者单位】西安工程大学电子信息学院,西安 710048;西安工程大学电子信息学院,西安 710048;西安工程大学电子信息学院,西安 710048;西安工程大学电子信息学院,西安 710048【正文语种】中文【中图分类】TP391.41LI Pengfei,WU Hai’e,JING Junfeng,et al.Computer Engineering and Applications,2016,52(20):188-192.随着点云数据在三维实体造型和虚拟现实中得到越来越广泛的应用,高效率、高精度的数据处理[1]和三维模型重建[2-3]已经成为逆向工程领域的热点研究内容。
一种基于几何关系的数据点云去噪算法作者:樊宇王宇楠王俊杰曹奇来源:《价值工程》2011年第20期A Triangle Filter Method for Reducing Noise Error of Points Clouds Data Based on Geometric RelationsFan Yu;Wang Yu'nan;Wang Junjie;Cao Qi(河海大学,南京 210098)(Hohai University,Nanjing 210098,China)摘要:点云去噪是逆向工程中点云数据处理中的一个重要环节,其对最终理想模型的精度将产生很大的影响。
针对激光扫描光刀法扫描的点云数据,本文提出了一种基于几何关系的三角形滤波法则,能够较好的进行去噪处理。
Abstract: Reducing noise error is an important link for point cloud data processing in reverse engineering, which has a great impact on the precision of the ultimate ideal model. For the point cloud data from laser scanning, this paper puts forward a new triangle filter method for reducing noise error of points clouds data based on geometric relations. Research shows that the triangle filter method can be better to reducing noise error.关键词:点云数据几何关系去噪三角形滤波法Key words: point cloud date;geometry relations;reducing noise error;triangle filter method中图分类号:G42文献标识码:A文章编号:1006-4311(2011)20-0217-020引言逆向工程是将已存在的食物模型通过数据采集、处理等过程最终实现实物的数据化,转化为一个设计、概念模型,并在此基础上对产品进行分析、修改及优化等技术。