STM32实验程序代码
- 格式:doc
- 大小:62.50 KB
- 文档页数:15
分享⾃⼰平时在⽹上收集的⼀些STM32源码,⼤家顶起哈!本帖部分附件需要少量⾦币,此⽬的是为了⿎励⼤家积极发帖,请⼤家见谅!3.2⼨真彩TFT液晶触摸屏,320*240像素,26万⾊,i8080 16位并⾏接⼝,带转接板及触控芯⽚,可以直接⽤AVR、51、PIC、dsPIC、ARM7、STM32等单⽚机驱动。
3.2TFT.rar (6.69 MB, 下载次数: 180, 售价: 2 ⾦币)⾮常不错的⼀款STM32开发板资料。
含原理图、⽤户⼿册、各类例程:USB虚拟串⼝、TFT显⽰例程、U盘例程、TCP通信、uCOS例程、MP3解码、步进电机例程等。
有KEIL和IAR两套例程。
Armfly-STM32-SCH-SoftDemo.rar (16.05 MB, 下载次数: 431, 售价: 2 ⾦币)uC/OS-II官⽅的stm32的移植,基于arm的Cortex M3-uC/OS-II。
Micrium-ST-uCOS-II-LCD-STM32.rar (2.43 MB, 下载次数: 379)花了近3个⽉的毕业设计的时间,直到前⼏天完成的基本运营。
论⽂繁忙过去⼏天中,第⼀次在地图上从现在使⽤的软件代码的⽅式。
STM32 RVMDK 。
某些功能,这个MP3播放: MP3播放功能,⽀持MP3/WAV/WMA/MIDI播放,⽀持快进,快退,歌词显⽰⽀持[第⼆⼗条:第⼆⼗条:⼆⼗] / [第XX : XX.XX ] / [第XX号:第XX号] ,以⽀持多话歌词共享标记收⾳机功能,并⽀持⾃动发现服务台, FM76 ? 1.08 ,⾃动存⼊台湾图⽚播放功能,⽀持16位, 24位, 32位,任何⼤⼩的BMP图⽚浏览,以及符合JPEG / JPG格式图⽚浏览(只要它是正确的格式,⼤⼩限制)。
1,温度计功能。
,传感器DS18B20的。
2,彩⾊灯功能。
3,功率放⼤器功能。
4,职能亿多年来在⽀持太阳,⽉球和节⽓周查看。
stm32程序设计STM32是意法半导体(STMicroelectronics)公司推出的一系列基于ARM Cortex-M内核的32位微控制器。
STM32微控制器广泛应用于嵌入式系统开发,包括物联网设备、工业自动化、消费电子、汽车电子等领域。
下面是一个简单的STM32程序设计的概述:硬件准备:选择合适的STM32系列微控制器,例如STM32F4、STM32L4等。
准备开发板、连接线和调试器。
安装STM32Cube软件包和相关工具,例如STM32CubeIDE、Keil MDK等。
创建工程:打开STM32CubeIDE或其他开发环境。
创建一个新的工程,并选择合适的STM32系列和型号。
配置工程设置,包括时钟设置、引脚配置、外设配置等。
编写代码:在工程中创建源文件,编写应用程序代码。
使用C或C++语言编写代码来初始化和控制STM32的各个外设,如GPIO、UART、SPI、I2C等。
根据应用需求,编写中断服务程序、定时器中断处理等。
编译和调试:使用开发环境进行编译,生成可执行文件。
将可执行文件下载到STM32微控制器中,可以通过调试器进行下载和调试。
在调试过程中,可以使用调试器来单步执行代码、查看寄存器状态、监视变量等。
测试和验证:运行并测试STM32程序,验证功能是否正常。
可以通过串口或其他外设与STM32进行通信,验证通信功能。
使用外部传感器或其他设备进行实际应用测试,验证系统的正确性和性能。
优化和部署:对程序进行性能优化,减少资源占用和功耗。
根据需求对程序进行修改和调整。
最终生成可部署的程序文件,可以烧录到STM32微控制器中,进行实际应用部署。
需要注意的是,以上是一个简单的概述,实际的STM32程序设计可能涉及更多复杂的内容,例如中断处理、DMA传输、低功耗优化等。
在开始STM32程序设计之前,建议阅读相关的文档和参考资料,熟悉STM32系列微控制器的特性和功能,并根据实际需求选择合适的开发环境和工具。
奋斗版 STM32 开发板例程文档———uIP1.0 ENC28J60 以太网例程uIP1.0 ENC28J60 以太网例程实验平台:奋斗版STM32开发板V2、V2.1、V3 实验内容:本例程演示了在奋斗STM32开发板上完成ARP,ICMP,TCP服务器、WEB 服务器以及UDP服务器,该实验学习了基于uIP1.0网络协议栈的程序编制。
预先需要掌握的知识1.ENC28J60ENC28J60是MICROCHIP公司的带SPI 接口的独立以太网控制器, 以太网控制器特性 • IEEE 802.3 兼容的以太网控制器 • 集成MAC 和10 BASE-T PHY • 接收器和冲突抑制电路 • 支持一个带自动极性检测和校正的10BASE-T 端口 • 支持全双工和半双工模式 • 可编程在发生冲突时自动重发 • 可编程填充和CRC 生成 • 可编程自动拒绝错误数据包 • 最高速度可达10 Mb/s 的SPI 接口 缓冲器 • 8 KB 发送/ 接收数据包双端口SRAM • 可配置发送/ 接收缓冲器大小 • 硬件管理的循环接收FIFO • 字节宽度的随机访问和顺序访问(地址自动递增) • 用于快速数据传送的内部DMA • 硬件支持的IP 校验和计算 介质访问控制器(MAC)特性 • 支持单播、组播和广播数据包 • 可编程数据包过滤,并在以下事件的逻辑“与” 和“或”结果为真时唤醒主机: - 单播目标地址 - 组播地址 广播地址 - Magic Packet - 由64 位哈希表定义的组目标地址 - 多达64 字节的可编程模式匹配(偏移量可由用户定义)淘宝店铺:1奋斗版 STM32 开发板例程文档———uIP1.0 ENC28J60 以太网例程• 环回模式 物理层(PHY)特性 • 整形输出滤波器 • 环回模式 工作特性 • 两个用来表示连接、发送、接收、冲突和全/ 半双工状态的可编程LED 输出 • 使用两个中断引脚的七个中断源 • 25 MHz 时钟 • 带可编程预分频器的时钟输出引脚 • 工作电压范围是3.14V 到3.45V • TTL 电平输入 • 温度范围:-40°C 到+85°C (工业级), 0°C 到 +70°C (商业级)(仅SSOP 封装) • 28 引脚SPDIP、SSOP、SOIC 和QFN 封装概述ENC28J60 是带有行业标准串行外设接口(SerialPeripheral Interface,SPI)的独立以太网控制器。
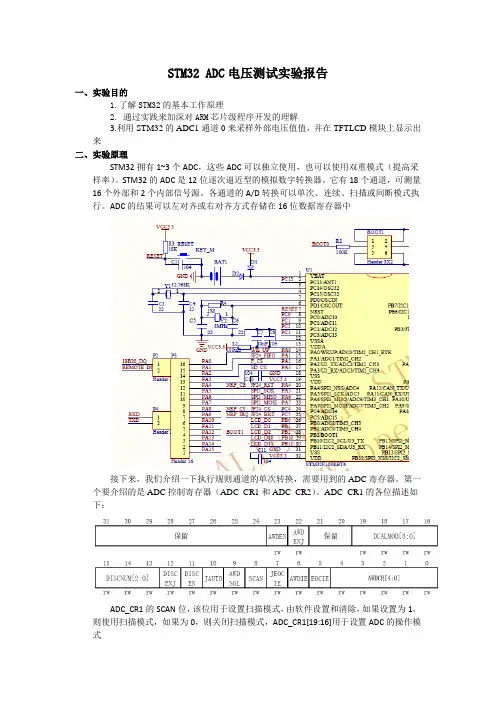
STM32 ADC电压测试实验报告一、实验目的1.了解STM32的基本工作原理2. 通过实践来加深对ARM芯片级程序开发的理解3.利用STM32的ADC1通道0来采样外部电压值值,并在TFTLCD模块上显示出来二、实验原理STM32拥有1~3个ADC,这些ADC可以独立使用,也可以使用双重模式(提高采样率)。
STM32的ADC是12位逐次逼近型的模拟数字转换器。
它有18个通道,可测量16个外部和2个内部信号源。
各通道的A/D转换可以单次、连续、扫描或间断模式执行。
ADC的结果可以左对齐或右对齐方式存储在16位数据寄存器中接下来,我们介绍一下执行规则通道的单次转换,需要用到的ADC寄存器。
第一个要介绍的是ADC控制寄存器(ADC_CR1和ADC_CR2)。
ADC_CR1的各位描述如下:ADC_CR1的SCAN位,该位用于设置扫描模式,由软件设置和清除,如果设置为1,则使用扫描模式,如果为0,则关闭扫描模式,ADC_CR1[19:16]用于设置ADC的操作模式我们要使用的是独立模式,所以设置这几位为0就可以了。
第二个寄存器ADC_CR2,该寄存器的各位描述如下:ADCON位用于开关AD转换器。
而CONT位用于设置是否进行连续转换,我们使用单次转换,所以CONT位必须为0。
CAL和RSTCAL用于AD校准。
ALIGN用于设置数据对齐,我们使用右对齐,该位设置为0。
EXTSEL[2:0]用于选择启动规则转换组转换的外部事件,我们这里使用的是软件触发(SWSTART),所以设置这3个位为111。
第三个要介绍的是ADC采样事件寄存器(ADC_SMPR1和ADC_SMPR2),这两个寄存器用于设置通道0~17的采样时间,每个通道占用3个位对于每个要转换的通道,采样时间建议尽量长一点,以获得较高的准确度,但是这样会降低ADC的转换速率。
ADC的转换时间可以由下式计算:Tcovn=采样时间+12.5个周期第四个要介绍的是ADC规则序列寄存器(ADC_SQR1~3),第五个要介绍的是ADC规则数据寄存器(ADC_DR)。
stm32编程流程一、准备工作在开始进行STM32编程之前,我们需要进行一些准备工作,包括以下几个方面:1. 硬件准备:选择适合的STM32开发板或芯片,确保其具备所需的功能和性能。
2. 软件准备:下载安装相应的开发工具,如Keil MDK或IAR Embedded Workbench,并确保其与所选硬件兼容。
3. 学习资料:阅读有关STM32系列微控制器的相关文档和参考手册,熟悉其架构、功能和寄存器设置等信息。
二、编程环境设置在进行STM32编程之前,我们需要进行编程环境的设置,包括以下几个方面:1. 创建工程:在开发工具中创建一个新的工程,选择适合的目标芯片,并设置工程的名称和保存路径。
2. 配置工程:对工程进行一些基本设置,如选择编译器、设置编译选项、配置调试器等。
3. 导入库文件:根据需要,导入相应的库文件,以便在编程过程中使用已封装好的函数和驱动程序。
三、编写代码在编程环境设置完成后,我们可以开始编写代码,包括以下几个步骤:1. 初始化系统:配置系统时钟、中断向量表、外设时钟等,以确保系统正常运行。
2. 配置外设:根据实际需求,配置各个外设的工作模式、时钟源、中断使能等参数。
3. 编写主程序:编写主程序的逻辑,包括数据处理、控制算法、通信协议等。
4. 编写中断服务程序:根据需要,编写中断服务程序来处理外部中断、定时器中断等事件。
四、编译和调试在代码编写完成后,我们需要进行编译和调试,以确保代码的正确性和可靠性,包括以下几个步骤:1. 编译代码:使用开发工具提供的编译器对代码进行编译,检查是否有语法错误和警告信息。
2. 烧录程序:将编译生成的可执行文件烧录到目标芯片中,以便在硬件上运行和测试。
3. 调试程序:使用调试器和仿真器等工具,对程序进行单步调试、观察变量值和寄存器状态等。
五、测试和优化在完成编译和调试后,我们需要对程序进行测试和优化,以确保其性能和稳定性,包括以下几个步骤:1. 功能测试:对程序的各个功能进行测试,确保其符合预期的行为和结果。
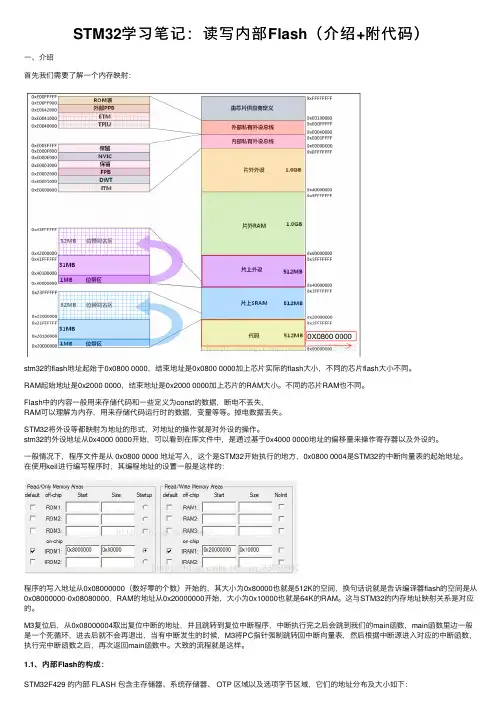
STM32学习笔记:读写内部Flash(介绍+附代码)⼀、介绍⾸先我们需要了解⼀个内存映射:stm32的flash地址起始于0x0800 0000,结束地址是0x0800 0000加上芯⽚实际的flash⼤⼩,不同的芯⽚flash⼤⼩不同。
RAM起始地址是0x2000 0000,结束地址是0x2000 0000加上芯⽚的RAM⼤⼩。
不同的芯⽚RAM也不同。
Flash中的内容⼀般⽤来存储代码和⼀些定义为const的数据,断电不丢失,RAM可以理解为内存,⽤来存储代码运⾏时的数据,变量等等。
掉电数据丢失。
STM32将外设等都映射为地址的形式,对地址的操作就是对外设的操作。
stm32的外设地址从0x4000 0000开始,可以看到在库⽂件中,是通过基于0x4000 0000地址的偏移量来操作寄存器以及外设的。
⼀般情况下,程序⽂件是从 0x0800 0000 地址写⼊,这个是STM32开始执⾏的地⽅,0x0800 0004是STM32的中断向量表的起始地址。
在使⽤keil进⾏编写程序时,其编程地址的设置⼀般是这样的:程序的写⼊地址从0x08000000(数好零的个数)开始的,其⼤⼩为0x80000也就是512K的空间,换句话说就是告诉编译器flash的空间是从0x08000000-0x08080000,RAM的地址从0x20000000开始,⼤⼩为0x10000也就是64K的RAM。
这与STM32的内存地址映射关系是对应的。
M3复位后,从0x08000004取出复位中断的地址,并且跳转到复位中断程序,中断执⾏完之后会跳到我们的main函数,main函数⾥边⼀般是⼀个死循环,进去后就不会再退出,当有中断发⽣的时候,M3将PC指针强制跳转回中断向量表,然后根据中断源进⼊对应的中断函数,执⾏完中断函数之后,再次返回main函数中。
⼤致的流程就是这样。
1.1、内部Flash的构成:STM32F429 的内部 FLASH 包含主存储器、系统存储器、 OTP 区域以及选项字节区域,它们的地址分布及⼤⼩如下:STM32F103的中容量内部 FLASH 包含主存储器、系统存储器、 OTP 区域以及选项字节区域,它们的地址分布及⼤⼩如下:注意STM32F105VC的是有64K或128页x2K=256k字节的内置闪存存储器,⽤于存放程序和数据。
STM32F030 之IAP 代码编写
程序收尾总想着以后更新的方便性,采用在应用编程(In ApplicaTIon Programming),通过Bootload 引导单片机自己往程序存储器里写数据或修改程序。
下面简介STM32F030 的IAP 方法。
不同于STM32F1 系列,F0 没有中断向量偏移寄存器。
所以在APP 程序的开头要添加以下代
码。
为什幺这样做??
可以看到函数用了for 循环将矢量表拷贝到0 x20000000 SRAM 的基地址,即将矢量表由Flash 映射到了SRAM。
所以在MDK 里面设置Flash 偏移地址的时候,同时要设置SRAM 偏移地址。
如下截图
//APP 程序开头加入IAP_Set(void)函数
有Target 对话框可以看出APP 程序有Flash 地址0x8001400 开始执行。
Sram 数据则有0x20000c0 出开始存储。
说完APP 代码要处理事项,下面说一下IAP 代码编写
程序更新完以后执行以上跳转函数即可执行更新的APP 代码。
关于。
设计报告——题目名称:基于STM32的倒车雷达系统一、题目要求使用STM32F401VE芯片为核心,添加超声波测距模块、DHT11温湿度检测模块、串口打印模块等,实现测距报警、温湿度检测并显示等功能。
二、设计目的随着人们生活水平质量的日益提高,私家车现在十分的普遍了,但是道路上行驶的车辆越来越多,由此引发的交通问题也值得人们关注。
在开车行驶的过程中,车辆会有很多的视野盲区,无法观察到前后的障碍物,导致交通事故频发。
倒车雷达是汽车泊车安全辅助装置,能够以声音或者更为直观的显示,告知驾驶员在视野盲区外的障碍物的信息,以降低驾驶者在倒车时出现事故的概率。
温湿度检测模块可以用来检测汽车内外环境的温湿度,以便于在车内了解实际的温湿度数据,让驾驶者能够更为灵活的使用空调或者加热设备,来调整汽车内的温湿度,保证了汽车内的环境适宜,给驾驶者和乘坐者一个更为舒适的环境。
三、设计原理(1)系统整体设计图1、系统整体设计框图将系统框图搭建完成后接下来对模块进行分别的设计,来完成最终的效果。
(2)温湿度检测模块图2、温湿度检测模块设计框图温湿度检测模块使用的是DHT11数字温湿度传感器,所以只需要通过STM32芯片对数据位进行读取,不需要经过AD转换的操作,使用起来比较方便,将获取到的数据显示到八位数码管上以提供观察,使得更为直观,并且串口也有相关的数据进行打印。
(3)HCSR04超声波测距模块图3、超声波测距模块设计框图超声波测距模块使用了HCSR04超声波测距器件,该器件通过TR触发测距,通过ECHO得到高电平时间,最终通过公式计算出距离。
(4)报警距离改变模块图4、报警距离改变模块设计框图通过两个按键,将所预设的标注距离来进行改变,通过使用不同的预设距离来对不同的实际情况进行一个调整,以满足在不同情况下的需求,保证其灵活性。
四、设计内容4.1设计方案通过四个按键来进行不同功能之间的进入,使用标志位来判断不同的按键按下,使得在不同功能之间的切换。
STM32F030探索套件开发日志/评测/学习笔记/使用问题60篇STM32F030超值系列基于48MHz的ARM Cortex™-M0处理器内核,批量订货最低价仅为0.32美元。
产品发布以后,ST MCU社区开展了免费申请STM32F030活动,之后发出150块套件,并收到60余篇网友开发日志,篇篇附有详细说明以及代码,部分如下:(点击进入各篇日志中,可查看详细内容,登陆论坛后,可直接下载代码)1、【STM32F030开发日志笔记】+PROJECT模板+解决flash download error终于有空试一下到手的板子了。
先发一下工程模板吧,用的是默认程序。
发现keil5.0多了个pack-installer,要安装相应的pack 才能选择对应的flash,这大概是很多人flash download error的原因吧2、【STM32F0开发日志/评测/笔记】+学习资料的收集与分享时钟配置工具AN4055.pdf工具篇:STLINK的使用.pdfSTM32F030数据手册.pdf3、【STM32F030开发日志】工程模板_基础实验(实现端口驱动,外部中断,定时器中断,PWM 控制、串口通信现已实现基本功能驱动,此程序可作为模版程序使用,程序包含IO端口驱动,外部中断,定时器中断,PWM控制,串口通信,ADC转换. 直接上传代码了,希望大家在此基础上增加功能并共享,有问题回帖讨论。
4、【STM32F0开发日志---二】+ucosii.2.92移植在STM32F0305、基于STM32F0的LCD显示驱动经过查找对比,确定使用IAR for ARM 6.7 了。
从官网下载IAR for ARM 6.7 解压缩安装很顺利,发现现在的软件愈来愈求大求全啊,越发的想念dos版的cpp编译器了6、【STM32F030开发日志/评测/笔记】+采集角位移传感器信号控制直流电机(待续)1、4只mos管,2只pmos,2只nmos,驱动直流电机换向工作;2、stm32f030,产生pwm波控制直流电机;3、1只精密角位移传感器,传感直流电机的偏转角度;4、stm32f030采集角位移传感器的角度值,反馈控制电机的偏转。
uwb stm32程序UWB STM32程序UWB(Ultra-Wideband)是一种无线通信技术,它具有高精度定位、高速数据传输和低功耗等特点。
而STM32是一款由STMicroelectronics公司推出的32位单片机系列,它具有低功耗、高性能和丰富的外设接口等优点。
本文将介绍如何在STM32上编写UWB程序,并实现UWB的基本功能。
我们需要准备好相关的硬件和软件。
硬件方面,需要一块STM32开发板,如STM32F407VET6,以及UWB模块,如DWM1000。
软件方面,需要安装Keil MDK开发环境和STM32CubeMX软件。
在安装好这些工具后,就可以开始编写UWB程序了。
第一步是使用STM32CubeMX生成基本的工程文件。
打开STM32CubeMX软件,选择相应的STM32型号,然后根据需要配置相应的引脚和外设。
对于UWB模块,一般需要配置SPI接口和GPIO引脚。
配置完成后,点击生成代码按钮,将会生成相应的工程文件和初始化代码。
第二步是在Keil MDK中编写UWB程序。
打开Keil MDK软件,选择File->New Project,然后选择相应的STM32型号和工程路径。
然后将生成的工程文件导入到Keil MDK中。
接下来,我们需要编写UWB 的初始化代码和相关功能代码。
初始化代码主要包括配置SPI接口和GPIO引脚,以及初始化UWB模块的寄存器。
相关功能代码包括发送和接收数据,进行定位和距离测量等操作。
在编写UWB程序时,需要根据UWB模块的文档和数据手册进行相应的配置和操作。
具体的代码实现可以参考UWB模块的驱动库和示例代码。
在编写代码时,需要注意使用合适的数据结构和算法,以提高程序的效率和可靠性。
同时,还需要进行相应的错误处理和异常处理,以确保程序的稳定性。
编写完UWB程序后,就可以进行编译和烧录了。
点击Keil MDK的Build按钮,进行编译,确保代码没有错误。
STM32实验报告一、实验目的本次实验的目的是了解并掌握STM32单片机的基本使用方法,学习如何通过编程控制STM32来完成一系列操作,包括输入输出控制、定时器控制等。
二、实验器材和材料1.STM32单片机开发板B数据线3. 开发环境:Keil uVision 5(或其他适用于STM32的编程软件)三、实验过程1. 配置开发环境:安装Keil uVision 5,并将STM32单片机开发板与计算机连接。
2.创建一个新的工程,并选择适当的芯片型号。
3.对芯片进行配置:选择适合的时钟源,设置GPIO端口等。
4.编写程序代码:根据实验要求,编写相应的程序代码。
5. 编译程序:在Keil uVision中进行编译,生成可执行文件。
6.烧录程序:将生成的可执行文件烧录到STM32单片机中。
7.调试与测试:连接各种外设并进行测试,检查程序功能的正确性。
8.实验结果分析:根据测试结果,分析并总结实验结果。
四、实验结果在本次实验中,我成功完成了以下几个实验任务:1.输入输出控制:通过配置GPIO端口为输入或输出,我成功实现了对外部开关、LED 等外设的控制。
通过读取外部开关的状态,我能够进行相应的逻辑操作。
2.定时器控制:通过配置并启动定时器,我成功实现了定时中断的功能。
可以通过定时中断来触发一系列事件,比如定时更新数码管的显示,控制电机的运动等。
3.串口通信:通过配置UART串口模块,我成功实现了与计算机的串口通信。
可以通过串口与计算机进行数据的收发,实现STM32与计算机的数据交互。
五、实验总结通过本次实验,我对STM32单片机的使用方法有了更深入的了解。
学会了如何配置GPIO端口、定时器、串口等,掌握了相应的编程技巧。
此外,还学会了如何进行调试和测试,检查程序功能的正确性。
通过实验的实际操作,我对STM32的各项功能有了更深入的理解。
需要注意的是,在实验过程中,我遇到了一些问题,比如代码编写错误、烧录问题等,但经过仔细分析和调试,最终都得到了解决。
实验1 GPIO#include "stm32f10x.h"#include "delay.h"//#include "sys.h"#include "stm32f10x_exti.h"//QHKJ TEB-CM5000实验箱STM32实验1//固件库V3.5工程模板//QHKJGPIO_InitTypeDef GPIO_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;/* Private function prototypes -----------------------------------------------*/ void RCC_Configuration(void);void NVIC_Configuration(void);void GPIO_Configuration(void);/* Private functions ---------------------------------------------------------*//******************************************************************************** Function Name : main* Description : Main program.* Input : None* Output : None* Return : None*******************************************************************************/int main(void){/* Configure the system clocks */// RCC_Configuration();// SysTick_Configuration();delay_init();/* NVIC Configuration */NVIC_Configuration();/* Configure the GPIO ports */GPIO_Configuration();/* Connect EXTI Line9 to PA.9 */GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource9);/* Configure EXTI Line8 to generate an interrupt on falling edge */EXTI_InitStructure.EXTI_Line = EXTI_Line9;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);for(;;){GPIO_Write(GPIOF, 0xf80f);delay_ms(100);GPIO_Write(GPIOF, 0xf817);delay_ms(100);GPIO_Write(GPIOF, 0xf827);delay_ms(100);GPIO_Write(GPIOF, 0xf847);delay_ms(100);GPIO_Write(GPIOF, 0xf887);delay_ms(100);GPIO_Write(GPIOF, 0x8907);delay_ms(100);GPIO_Write(GPIOF, 0xfa07);delay_ms(100);GPIO_Write(GPIOF, 0xfc07);delay_ms(100);}}/******************************************************************************* * Function Name : NVIC_Configuration* Description : Configures Vector Table base location.* Input : None* Output : None* Return : None*******************************************************************************/ void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;/* Configure one bit for preemption priority */NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);/* Enable the EXTI9_5 Interrupt */// NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQChannel;NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}/******************************************************************************** Function Name : GPIO_Configuration* Description : Configures the different GPIO ports.* Input : None* Output : None* Return : None*******************************************************************************/void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;/* Enable GPIOA, GPIOF and AFIO clocks */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOF |RCC_APB2Periph_AFIO, ENABLE);/* Configure PF. as Output push-pull */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9|GPIO_Pi n_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOF, &GPIO_InitStructure);/* Configure PA9 as input floating (EXTI Line9) */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOA, &GPIO_InitStructure);}实验7 LED流水灯#include "stm32f10x.h"//QHKJ TEB-CM5000实验箱STM32实验7//固件库V3.5工程模板//QHKJ/*LED灯相关定义*/#define RCC_GPIO_LED RCC_APB2Periph_GPIOF /*LED使用的GPIO时钟*/#define LEDn 8 /*LED数量*/#define GPIO_LED GPIOF /*LED灯使用的GPIO组*/#define LD1_PIN GPIO_Pin_3 /*LD1使用的GPIO 管脚*/#define LD2_PIN GPIO_Pin_4 /*LD2使用的GPIO管脚*/#define LD3_PIN GPIO_Pin_5 /*LD3使用的GPIO管脚*/#define LD4_PIN GPIO_Pin_6 /*LD4使用的GPIO管脚*/#define LD5_PIN GPIO_Pin_7 /*LD5使用的GPIO 管脚*/#define LD6_PIN GPIO_Pin_8 /*LD6使用的GPIO管脚*/#define LD7_PIN GPIO_Pin_9 /*LD7使用的GPIO管脚*/#define LD8_PIN GPIO_Pin_10 /*LD8使用的GPIO管脚*//* Private macro -------------------------------------------------------------*//* Private variables ---------------------------------------------------------*/ GPIO_InitTypeDef GPIO_InitStructure;u8 count=0;/* Private function prototypes -----------------------------------------------*///void RCC_Configuration(void);//void NVIC_Configuration(void);void Delay(vu32 nCount);void Turn_On_LED(u8 LED_NUM);/* Private functions ---------------------------------------------------------*//******************************************************************************** Function Name : main* Description : Main program.* Input : None* Output : None* Return : None*******************************************************************************/int main(void){/* 配置LED灯使用的GPIO管脚模式*/RCC_APB2PeriphClockCmd(RCC_GPIO_LED, ENABLE); /*使能LED灯使用的GPIO时钟*/GPIO_InitStructure.GPIO_Pin = LD1_PIN|LD2_PIN|LD3_PIN|LD4_PIN|LD5_PIN|LD6_PIN|LD7_PIN|LD8_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIO_LED, &GPIO_InitStructure); /*使用的LED灯相关的GPIO口初始化*/GPIO_ResetBits(GPIO_LED,LD1_PIN|LD2_PIN|LD3_PIN|LD4_PIN|LD5_PIN|LD6_PIN|LD7_PI N|LD8_PIN);/*关闭所有的LED指示灯*/while(1){GPIO_ResetBits(GPIO_LED,LD1_PIN|LD2_PIN|LD3_PIN|LD4_PIN|LD5_PIN|LD6_PIN|LD7_PI N|LD8_PIN);/*关闭所有的LED指示灯*/Turn_On_LED(count%8); //点亮一个LED灯count++;Delay(0x0FFFFF);}}/*点亮对应灯*/void Turn_On_LED(u8 LED_NUM){switch(LED_NUM){case 0:GPIO_SetBits(GPIO_LED,LD1_PIN); /*点亮LD1灯*/break;case 1:GPIO_SetBits(GPIO_LED,LD2_PIN); /*点亮LD2灯*/break;case 2:GPIO_SetBits(GPIO_LED,LD3_PIN); /*点亮LD3灯*/break;case 3:GPIO_SetBits(GPIO_LED,LD4_PIN); /*点亮LD4灯*/break;case 4:GPIO_SetBits(GPIO_LED,LD5_PIN); /*点亮LD5灯*/break;case 5:GPIO_SetBits(GPIO_LED,LD6_PIN); /*点亮LD6灯*/break;case 6:GPIO_SetBits(GPIO_LED,LD7_PIN); /*点亮LD7灯*/break;case 7:GPIO_SetBits(GPIO_LED,LD8_PIN); /*点亮LD8灯*/break;default:GPIO_SetBits(GPIO_LED,LD1_PIN|LD2_PIN|LD3_PIN|LD4_PIN|LD5_PIN|LD6_PIN|LD7_PIN|LD8_ PIN); /*点亮所有的灯*/break;}}/******************************************************************************** Function Name : Delay* Description : Inserts a delay time.* Input : nCount: specifies the delay time length.* Output : None* Return : None*******************************************************************************/void Delay(vu32 nCount){for(; nCount != 0; nCount--);}实验11 串口收发#include "stm32f10x.h"#include "stm32f10x_usart.h"//QHKJ TEB-CM5000实验箱STM32实验11//固件库V3.5工程模板//QHKJ/* Private typedef -----------------------------------------------------------*//*LED灯相关定义*/#define RCC_GPIO_LED RCC_APB2Periph_GPIOF /*LED使用的GPIO时钟*/#define LEDn 4 /*LED数量*/#define GPIO_LED GPIOF /*LED灯使用的GPIO组*/#define LD1_PIN GPIO_Pin_3 /*LD1使用的GPIO 管脚*/#define LD2_PIN GPIO_Pin_4 /*LD2使用的GPIO管脚*/#define LD3_PIN GPIO_Pin_5 /*LD3使用的GPIO管脚*/#define LD4_PIN GPIO_Pin_6 /*LD4使用的GPIO管脚*//*串口相关定义*/#define USART1_GPIO GPIOA#define USART1_CLK RCC_APB2Periph_USART1#define USART1_GPIO_CLK RCC_APB2Periph_GPIOA#define USART1_RxPin GPIO_Pin_10#define USART1_TxPin GPIO_Pin_9//#define USART1_IRQn USART1_IRQn//#define USART1_IRQHandler USART1_IRQHandler#define USART2_GPIO GPIOA#define USART2_CLK RCC_APB1Periph_USART2#define USART2_GPIO_CLK RCC_APB2Periph_GPIOA#define USART2_RxPin GPIO_Pin_3#define USART2_TxPin GPIO_Pin_2//#define USART2_IRQn USART2_IRQn//#define USART2_IRQHandler USART2_IRQHandlerGPIO_InitTypeDef GPIO_InitStructure;/* Private typedef -----------------------------------------------------------*/ typedef enum { FAILED = 0, PASSED = !FAILED} TestStatus;/* Private define ------------------------------------------------------------*/#define TxBufferSize1 (countof(TxBuffer1) - 1)#define TxBufferSize2 (countof(TxBuffer2) - 1)#define RxBufferSize1 TxBufferSize2#define RxBufferSize2 TxBufferSize1/* Private macro -------------------------------------------------------------*/ #define countof(a) (sizeof(a) / sizeof(*(a)))/* Private variables ---------------------------------------------------------*/ USART_InitTypeDef USART_InitStructure;u8 TxBuffer1[] = "串口中断收发示例: 串口1 -> 串口2 (中断收发)";u8 TxBuffer2[] = "串口中断收发示例: 串口2 -> 串口1 (中断收发)";u8 RxBuffer1[RxBufferSize1];u8 RxBuffer2[RxBufferSize2];u8 TxCounter1 = 0x00;u8 TxCounter2 = 0x00;u8 RxCounter1 = 0x00;u8 RxCounter2 = 0x00;u8 NbrOfDataToTransfer1 = TxBufferSize1;u8 NbrOfDataToTransfer2 = TxBufferSize2;u8 NbrOfDataToRead1 = RxBufferSize1;u8 NbrOfDataToRead2 = RxBufferSize2;u8 TransferStatus1 = FAILED;u8 TransferStatus2 = FAILED;/* Private function prototypes -----------------------------------------------*/ void RCC_Configuration(void);void GPIO_Configuration(void);void NVIC_Configuration(void);TestStatus Buffercmp(u8* pBuffer1, u8* pBuffer2, u16 BufferLength);/* Private functions ---------------------------------------------------------*//*** @brief Main program* @param None* @retval None*/int main(void){/* System Clocks Configuration */RCC_Configuration();/* NVIC configuration */NVIC_Configuration();/* Configure the GPIO ports */GPIO_Configuration();GPIO_ResetBits(GPIO_LED,LD1_PIN|LD2_PIN|LD3_PIN|LD4_PIN);/*关闭所有的LED指示灯*/ /* USART1 and USART2 configuration ------------------------------------------------------*//* USART1 and USART2 configured as follow:- BaudRate = 9600 baud- Word Length = 8 Bits- One Stop Bit- No parity- Hardware flow control disabled (RTS and CTS signals)- Receive and transmit enabled*/USART_ART_BaudRate = 115200; /*设置波特率为115200*/USART_ART_WordLength = USART_WordLength_8b;/*设置数据位为8*/ USART_ART_StopBits = USART_StopBits_1; /*设置停止位为1位*/ USART_ART_Parity = USART_Parity_No; /*无奇偶校验*/USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;/*无硬件流控*/USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; /*发送和接收*//*配置串口1 */USART_Init(USART1, &USART_InitStructure);/*配置串口2*/USART_Init(USART2, &USART_InitStructure);/*使能串口1的发送和接收中断*/USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_ITConfig(USART1, USART_IT_TXE, ENABLE);/*使能串口2的发送和接收中断*/USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);USART_ITConfig(USART2, USART_IT_TXE, ENABLE);/* 使能串口1 */USART_Cmd(USART1, ENABLE);/* 使能串口2 */USART_Cmd(USART2, ENABLE);/* Wait until end of transmission from USART1 to USART2 */while(RxCounter2 < RxBufferSize2){}/* Wait until end of transmission from USART2 to USART1 */while(RxCounter1 < RxBufferSize1){}/* Check the received data with the send ones */TransferStatus1 = Buffercmp(TxBuffer2, RxBuffer1, RxBufferSize1);/* TransferStatus1 = PASSED, if the data transmitted from USART2 andreceived by USART1 are the same *//* TransferStatus1 = FAILED, if the data transmitted from USART2 andreceived by USART1 are different */TransferStatus2 = Buffercmp(TxBuffer1, RxBuffer2, RxBufferSize2);/* TransferStatus2 = PASSED, if the data transmitted from USART1 andreceived by USART2 are the same *//* TransferStatus2 = FAILED, if the data transmitted from USART1 andreceived by USART2 are different */while (1){if(TransferStatus1 == PASSED){GPIO_SetBits(GPIO_LED,LD1_PIN);/*点亮LD1,串口1接收的数据与串口2发送的数据相同*/}else if(TransferStatus1 == FAILED){GPIO_SetBits(GPIO_LED,LD2_PIN);/*点亮LD2,串口1接收的数据与串口2发送的数据不相同*/}if(TransferStatus2 == PASSED){GPIO_SetBits(GPIO_LED,LD3_PIN);/*点亮LD3,串口2接收的数据与串口1发送的数据相同*/}else if(TransferStatus2 == FAILED){GPIO_SetBits(GPIO_LED,LD4_PIN);/*点亮LD4,串口2接收的数据与串口1发送的数据不相同*/}}}/*** @brief Configures the different system clocks.* @param None* @retval None*/void RCC_Configuration(void){/*使能串口1和串口2使用的GPIO时钟*/RCC_APB2PeriphClockCmd(USART1_GPIO_CLK |USART2_GPIO_CLK, ENABLE); /* Enable USART1 Clock *//*使能串口1时钟*/RCC_APB2PeriphClockCmd(USART1_CLK, ENABLE);/*使能串口2时钟*/RCC_APB1PeriphClockCmd(USART2_CLK, ENABLE);/*使能LED灯使用的GPIO时钟*/RCC_APB2PeriphClockCmd(RCC_GPIO_LED, ENABLE);}/*** @brief Configures the different GPIO ports.* @param None* @retval None*/void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;/*串口1 RX管脚配置*//* Configure USART1 Rx as input floating */GPIO_InitStructure.GPIO_Pin = USART1_RxPin;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(USART1_GPIO, &GPIO_InitStructure);/*串口2 RX管脚配置*//* Configure USART2 Rx as input floating */GPIO_InitStructure.GPIO_Pin = USART2_RxPin;GPIO_Init(USART2_GPIO, &GPIO_InitStructure);/*串口1 TX管脚配置*//* Configure USART1 Tx as alternate function push-pull */GPIO_InitStructure.GPIO_Pin = USART1_TxPin;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(USART1_GPIO, &GPIO_InitStructure);/*串口2 TX管脚配置*//* Configure USART2 Tx as alternate function push-pull */GPIO_InitStructure.GPIO_Pin = USART2_TxPin;GPIO_Init(USART2_GPIO, &GPIO_InitStructure);/* 配置LED灯使用的GPIO管脚模式*/GPIO_InitStructure.GPIO_Pin = LD1_PIN|LD2_PIN|LD3_PIN|LD4_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIO_LED, &GPIO_InitStructure);}/*** @brief Configures the nested vectored interrupt controller.* @param None* @retval None*/void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;/* Configure the NVIC Preemption Priority Bits */NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);/* Enable the USART1 Interrupt */NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);/* Enable the USART2 Interrupt */NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}/*** @brief Compares two buffers.* @param pBuffer1, pBuffer2: buffers to be compared.* @param BufferLength: buffer's length* @retval PASSED: pBuffer1 identical to pBuffer2* FAILED: pBuffer1 differs from pBuffer2*/TestStatus Buffercmp(u8* pBuffer1, u8* pBuffer2, u16 BufferLength) {while(BufferLength--){if(*pBuffer1 != *pBuffer2){return FAILED;}pBuffer1++;pBuffer2++;}return PASSED;}/*** @brief This function handles USART1 global interrupt request. * @param None* @retval None*/void USART1_IRQHandler(void){if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET){/* Read one byte from the receive data register */RxBuffer1[RxCounter1++] = USART_ReceiveData(USART1);if(RxCounter1 == NbrOfDataToRead1){/* Disable the USART1 Receive interrupt */USART_ITConfig(USART1, USART_IT_RXNE, DISABLE);}}if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET){/* Write one byte to the transmit data register */USART_SendData(USART1, TxBuffer1[TxCounter1++]);if(TxCounter1 == NbrOfDataToTransfer1){/* Disable the USART1 Transmit interrupt */USART_ITConfig(USART1, USART_IT_TXE, DISABLE);}}}/*** @brief This function handles USART2 global interrupt request. * @param None* @retval None*/void USART2_IRQHandler(void){if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){/* Read one byte from the receive data register */RxBuffer2[RxCounter2++] = USART_ReceiveData(USART2);if(RxCounter2 == NbrOfDataToRead1){/* Disable the USART2 Receive interrupt */USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);}}if(USART_GetITStatus(USART2, USART_IT_TXE) != RESET){/* Write one byte to the transmit data register */USART_SendData(USART2, TxBuffer2[TxCounter2++]);if(TxCounter2 == NbrOfDataToTransfer2){/* Disable the USART2 Transmit interrupt */USART_ITConfig(USART2, USART_IT_TXE, DISABLE);}}}。