自由度分析作业题(答案)课件
- 格式:pdf
- 大小:2.21 MB
- 文档页数:18





机构:在运动链中,如果将某一个构件加以固定,而让另一个或几个构件按给定运动规律相对固定构件运动时,如果运动链中其余各活动构件都有确定的相对运动,则此运动链称为机构。
机构是具有确定运动的运动链。
机架原动件从动件在运动链中,将某一个构件加以固定,而让另一个或几个构件按给定运动规律相对固定构件运动时,如果运动链中其余各构件都有确定的相对运动,则此运动链成为机构。
1’1234机构简图可能的情况具有确定的相对运动无相对运动相对运动不确定1.2 运动链成为机构的条件1.2.1机构具有确定运动的条件自由度:构件所具有的独立运动的数目,或确定构件位置所需的独立变量的数目自由构件(空间):F = 6自由构件(平面):F = 3约束:运动副对构件独立运动所加的限制机构具有确定运动的条件自由度数------构件所具有的独立运动的数目称自由度。
作平面运动的刚体有三个自由度(三个坐标参数才能确定其位置)低副的引入减少两个自由度x高副的引入减少一个自由度沿法线方向不能运动)(xfy◆综上所述,平面机构中,◆每个低副引入两个约束,◆使构件失去两个自由度;◆每个高副引入一个约束,◆使构件失去一个自由度。
机构的自由度数F(需要F 个坐标参数才能确定机构中所有构件的位置)。
hl 23P P n F --=活动构件数目低副数目高副数目机构的自由度数F 应等于机构的原动件数hl 23P P n F --=活动构件数目低副数目高副数目1234AC B D1234ACB D14A1AF=3F=1124A B F=2F=3F=1F == 13×3-2×41234F =11243【引例】设:●平面机构自由度的计算公式F = 3n -2P L -P H有n 个活动构件,P L 个低副,P H 个高副,则【例2-3】计算铰链五杆机构的自由度。
【解】n =4P L =5F =3n -2P L -P HP H =0F =2= 3×4 -2×5 -0= 241235123F=0:静定桁架1234F=-1:超静定桁架结论:F>0,机构可动。
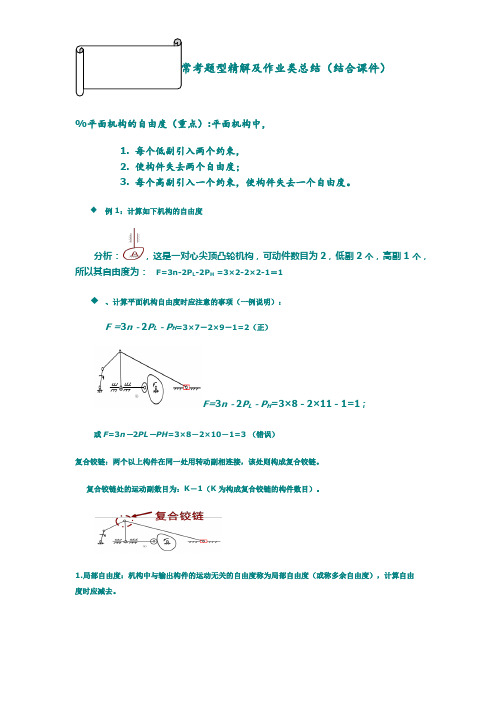
%平面机构的自由度(重点):平面机构中,1.每个低副引入两个约束,2.使构件失去两个自由度;3.每个高副引入一个约束,使构件失去一个自由度。
◆例1:计算如下机构的自由度分析:,这是一对心尖顶凸轮机构,可动件数目为2,低副2个,高副1个,所以其自由度为: F=3n-2P L-2P H =3×2-2×2-1=1◆、计算平面机构自由度时应注意的事项(一例说明):F =3n-2P L-P H=3×7-2×9-1=2(正)F=3n-2P L-P H=3×8-2×11-1=1;或F=3n-2PL-PH=3×8-2×10-1=3 (错误)复合铰链:两个以上构件在同一处用转动副相连接,该处则构成复合铰链。
复合铰链处的运动副数目为:K-1(K为构成复合铰链的构件数目)。
1.局部自由度:机构中与输出构件的运动无关的自由度称为局部自由度(或称多余自由度),计算自由度时应减去。
2.虚约束:对机构起重复约束作用的约束称为虚约束或消极约束,计算自由度时应去掉构成虚约束的构件及运动副。
@出现虚约束的几种情况(补充):@1.两构件间形成多个轴线重合的转动副,轴与轴承在同一轴线上形成两个转动副;两构件形成多个导路平行的移动副。
@2.机构中两构件未联接前的联接点轨迹重合, 则该联接引入1个虚约束。
@3.若两构件在多处相接触构成平面高副,且各接触点处的公法线重合,则只能算一个平面高副。
若公法线方向不重合,将提供各2个约束。
C-C‘,B-B’虚约束;@4.对机构运动不起作用的对称部分引入虚约束。
典型例题解析:3-局部自由度;8-9-10复合铰链;7两者之一为虚约束。
解:几种特殊情况如图上所示,可动件个数为9,低副12个,高副2个。
F=3n-2P L-P H=3×9-2×12-2=1(作业答案)1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。